技术特征:
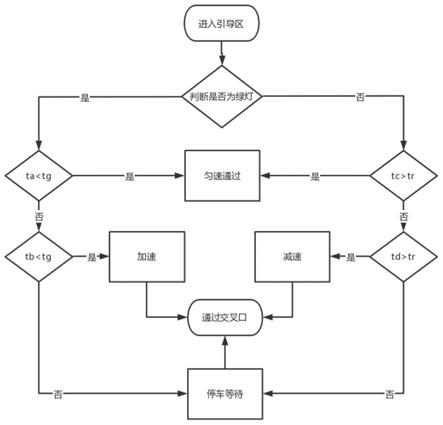
1.一种基于v2x的交叉口平滑车速引导方法,其特征在于包括以下步骤:s1、目标车辆进入引导区间,通过v2x通信技术,目标车辆与信号灯进行信息交互,判断当前信号灯的颜色,若为绿色则执行步骤s2,若为黄色或红色则执行步骤s4;s2、根据绿灯的剩余时间t
g
、目标车辆行驶至停止线的时间t
a
,判断目标车辆行驶至停止线的时间是否小于绿灯剩余的时间,若t
a
≤t
g
,则目标车辆匀速通过停止线,输出建议车速v0;s3、若t
a
>t
g
,目标车辆加速行驶,以变加速a
a
加速到最高限速v
max
,并根据加速行驶的距离计算目标车辆到达停止线的时间t
b
,若t
b
≤t
g
,则车辆加速通过,否则停车等待;s4、根据红灯的剩余时间t
r
、目标车辆驶至停止线的时间t
c
,判断目标车辆行驶至停止线的时间是否大于红灯剩余的的时间,若t
c
>t
r
,则目标车辆匀速通过停止线,输出建议车速;s5、若t
c
≤t
r
,目标车辆减速行驶,以变减速a
d
减速到最低限速v
min
,并根据减速行驶的距离计算目标车辆达到停止线的时间t
d
,若t
r
<t
d
,则车辆减速通过,否则停车等待。2.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s2中,目标车辆行驶至停止线的时间为:t
a
=l/v0,其中l为目标车辆距停止线的距离;v0为目标车辆进入到引导区间时的速度。3.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s3中目标车辆到达停止线的时间t
b
的公式如下:其中,v
max
为道路最高限速,t
b1
为加加速行驶的时间,t
b2
为匀加速行驶的时间,t
b3
为减加速行驶的时间,s3为变加速过程行驶的位移距离。4.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s3中变加速a
a
利用s形加减速曲线算法求得,具体运算如下:其中:t
k
=t
k-t
k-1
,t
k
为每个阶段持续的时间,τ
k
=t-t
k
,表示当前时刻在第k个阶段持续的时间,加加速j1恒定且t1=t3。5.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s3中绿灯加速过程中,为了使速度曲线平滑过渡,速度v0先经过加加速达到v1,再经过匀加速达到v2,最后再经过减加速达到v3,
其中,v3=v
max
;步骤s3中绿灯加速过程中,每个时刻t行驶的距离为s,具体如下:6.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s4中,目标车辆行驶至停止线的时间为:t
a
=l/v0,其中l为目标车辆距停止线的距离;v0为目标车辆进入到引导区间时的速度。7.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s5中目标车辆达到停止线的时间t
d
公式如下:v
min
为道路最低限速,t
d1
为加减速度行驶的时间,t
d2
为匀减速行驶的时间,t
d3
为减减速行驶的时间,s
d3
为变减速过程行驶的位移。8.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s5中变减速a
b
利用s形加减速曲线算法求得,具体运算如下:其中j2为恒定值减速度。9.根据权利要求1所述的一种基于v2x的交叉口平滑车速引导方法,其特征在于:步骤s5中红灯加速过程,为了使速度曲线平滑过渡,速度v0先经过加减速达到v1,再经过匀减速达到v2,最后再经过减减速达到v3;其中,v3=v
min
;步骤s5中红灯过程,每个时刻t行驶的距离为s,具体如下:
技术总结
本发明提供了一种基于V2X的交叉口平滑车速引导方法,搭载智能车载设备的目标车辆进入引导区间后,能够接收到路口信号灯传递的的信号配时和当前相位等信息,并利用当前灯色剩余时间、当前车速、车辆距停止线距离等参数,判断车辆能否匀速或通过变化车速,平稳且不停车通过交叉口。本发明所述的交叉口平滑车速引导方法,通过对进入交叉口引导区间的车辆进行车速引导,尽可能做到不停车通过交叉口,减少等待时间,提高通行效率,同时利用s形加减速算法,使得速度曲线平滑,提高驾驶平稳性。提高驾驶平稳性。提高驾驶平稳性。
技术研发人员:吴志新 郭蓬 王梦丹 杨建森 蔡聪 许扬眉 张登权 何佳
受保护的技术使用者:中国汽车技术研究中心有限公司
技术研发日:2021.11.29
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。