1.本发明涉及一种无人化文档存放技术领域,尤其是一种可多用户操作的无人库房平台运营方法。
背景技术:
2.档案一般指人们在各项社会活动中直接形成的各种形式的具有保存价值的原始记录,厚度在10mm左右,随着社会的发展,档案信息量以指数级增长,档案归档、存取、查阅的工作量日益加大,然而目前档案的取阅和存放工作仍由档案管理员人工完成,费时费力,效率不高,因此人们研发了一种如公告号为cn207226226u的全自动智能档案管理装置,但是其在操作取档、还档时悬臂机器人抓取档案平均耗时大于30秒/份,若多个用户要拿取档案或归还档案时,存在长时间等待的问题。
技术实现要素:
3.本发明的目的是为了解决上述技术的不足而设计的一种提升档案存放和取阅效率,且省时省力的一种可多用户操作的无人库房平台运营方法。
4.本发明所设计的一种可多用户操作的无人库房平台运营方法,其具体包括步骤如下:
5.s1.文档入库
6.s11.以人体特征验证方式识别授权人员的信息,验证识别出特征匹配则正常登入无人库房平台来获取还档操作界面,验证识别出特征不匹配则拒绝登入无人库房平台;
7.s12.基于还档操作界面选择入库文档类型、编号及数量来形成对无人库房中对应数量的取档装置开门指令,无人库房取档装置的取档口根据开门指令而开启;
8.s13.对无人库房中已开启对应数量的取档口进行监测是否放入文档,且所放入的文档类型、编号及数量是否与所选择的入库文档类型、编号及数量对应匹配,不匹配则发出提醒,匹配则形成还档指令;
9.s14.根据步骤s13形成的还档指令驱动无人库房自由位移机械手将取档装置处的文档取走放入至对应的编号的无人库房文档存储空间中;
10.s2.文档出库
11.s21..取档者经身份卡验证方式获取文档提取界面,然后在文档提取界面中输入文档编号、类型和数量的信息后形成待取文档指令进行控制驱动无人库房自由位移机械手将对应的文档抓取放入至取档装置中,并通知取档者;
12.s22.取档者根据通知信息进行以人体特征验证方式识别取档人员的信息,验证识别出特征匹配则正常登入无人库房平台来获取取档操作界面,验证识别出特征不匹配则拒绝登入无人库房平台;
13.s23.取档者根据取档操作界面控制取档装置的取档口开启,以进行取出档案。
14.作为优选,人体特征验证方式包括人脸识别验证方式。
15.作为优选,在步骤s13中,利用rfid扫描天线识别读取文档上rfid标签对取档装置中的文档类型、编号及数量进行监测。
16.作为优选,根据需要取放的文档位置、类型、编号及数量信息进行计算x轴位移量、y轴位移量、z轴位移量和旋转角度的度数,以使自由位移机械手位移至对应位置的无人库房文档存储空间处或者位移至取档装置的入档口处。
17.作为优选,自由位移机械手上的视觉定位摄像头进行监测机械手是否到达对应位置的无人库房文档存储空间处或者位移至取档装置的入档口处,监测到达时生成取档指令或还档指令以驱动自由位移机械手位移进行文档存放或抓取。
18.作为优选,自由位移机械手上的rfid文档识别模块,监测所拿取的文档类型和编号是否与取档者录入的文档类型和编号对应匹配,以对入库文档和出库文档进行核实是否拿取正确。
19.作为优选,在步骤s21中,取档装置监测文档放入时间,当文档放入之间达到设定的延时时长后,生成还档指令进行驱动自由位移机械手位移将未在设定时间内取走的文档进行抓取并输送至原位。
20.作为优选,在步骤s22中,通过人脸识别验证的数据与身份卡中的人脸数据进行配对来获取待取文档的编号、类型及数量,并显示在取档操作界面中。
21.作为优选,在步骤s13中,对于取档装置得到文档入库信息后臭氧发生器启动对文档进行消毒;
22.若监测出文档所放入的文档类型、编号及数量与所选择的入库文档类型、编号及数量不匹配,则关闭臭氧发生器;
23.若监测出文档所放入的文档类型、编号及数量与所选择的入库文档类型、编号及数量对应匹配,则在设定时长内正常开启臭氧发生器,在消毒完毕后,形成还还档指令,并进入步骤s14。
24.本发明所设计的一种可多用户操作的无人库房平台运营方法,其利用文档取放者的前端验证登入后操作给出的指令来控制后台无人库房自动运行进行文档入库操作,另一方面文档取放者先对后台无人库房提出的取档申请后驱动无人库房自动运行抓取对应数量、类型及编号的文档后通知文档取放者文档抓取到位,并且通过验证登入方式来确认文档取放者身份来获取取档数量后进行取档操作,所以依后台操作取档数量,以及前端进行取档的分离式取档方式,实现多个用户可同时进行取档,或者在前端操作还档,后台操作归档入库的操作,实现多个用户可同时进行还档操作,从而进一步解决了多个用户要拿取档案或归还档案时,存在长时间等待的技术问题,另外取档、还档可同时完成,效率高。
附图说明
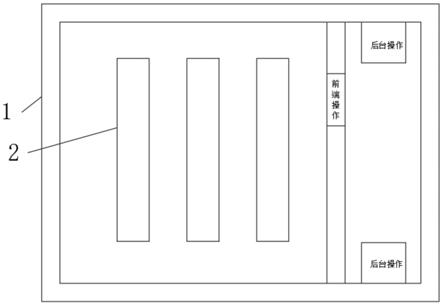
25.图1是整体结构示意图;
26.图2是文档入库操作流程;
27.图3是文档出库操作流程;
28.图4是无人库房结构示意图;
29.图5是升降装置和文档抓取机械手结合结构示意图;
30.图6是文档抓取机械手结合结构示意图(一);
31.图7是文档抓取机械手结合结构示意图(二);
32.图8是档案存放空间的结构示意图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例1:
35.如图1所示,本实施例所描述的一种可多用户操作的无人库房平台运营方法,其具体包括步骤如下:
36.s1.文档入库
37.s11.以人脸识别验证方式识别授权人员的信息,验证识别出特征匹配则正常登入无人库房平台来获取还档操作界面,验证识别出特征不匹配则拒绝登入无人库房平台;
38.s12.基于还档操作界面选择入库文档类型、编号及数量来形成对无人库房中对应数量的取档装置开门指令,无人库房取档装置的取档口根据开门指令而开启;
39.s13.对无人库房中已开启对应数量的取档口进行监测是否放入文档,且所放入的文档类型、编号及数量是否与所选择的入库文档类型、编号及数量对应匹配,不匹配则发出提醒,匹配则形成还档指令;
40.s14.根据步骤s13形成的还档指令驱动无人库房自由位移机械手将取档装置处的文档取走放入至对应的编号的无人库房文档存储空间中;
41.s2.文档出库
42.s21..取档者经身份卡验证方式获取文档提取界面,然后在文档提取界面中输入文档编号、类型和数量的信息后形成待取文档指令进行控制驱动无人库房自由位移机械手将对应的文档抓取放入至取档装置中,并通知取档者;
43.s22.取档者根据通知信息进行以人脸识别验证方式识别取档人员的信息,验证识别出特征匹配则正常登入无人库房平台来获取取档操作界面,验证识别出特征不匹配则拒绝登入无人库房平台;
44.s23.取档者根据取档操作界面控制取档装置的取档口开启,以进行取出档案。
45.上述中,无人库房内设置有多个相互等距离间隔的档案架2和一台自由位移机械手4,档案架2上设置有文档存储空间2a,从而自由位移机械手在各间距中行走进行作取档、归档操作,其中自由位移机械手可以由agv小车、升降装置10、安装于升降装置10上的一六轴工业机器人和文档抓取机械手组成,或者也可以由定轨架、固定于定轨架上的动轨、安装在动轨上的升降装置10和安装在升降装置10上的文档抓取机械手组成,其中定轨架驱动动轨作x轴的往复位移,动轨驱动文档抓取机械手作y轴往复位移,升降装置10驱动文档抓取机械手作z轴升降往复位移,并且文档抓取机械手包括设置于升降装置装置上的旋转机构40,旋转机构40上设有水平移动机构50,水平移动机构50上活动设有抓取机构60,然而升降机构采用滚珠丝杠结构的纵向位移伺服滑台装置,水平移动机构50靠近抓取机构60设置的摄像头80,摄像头80上设有补光灯90,旋转机构40采用电机与齿轮传动机构配合实现水平
位移机构的旋转,水平移动机构50采用滚珠丝杆结构的水平位移伺服滑台,抓取机构60包括承载部61和若干用于抓取或码放档案的夹板62,夹板62相对活动设置在承载部61上,承载部61上设有用于控制两夹板62相对靠近或远离的夹板控制机构70。
46.具体的,库房1上还设有透明玻璃窗,便于查看悬臂机械手4的工作情况及档案架2的状态。档案架2上设有若干档案存放空间2a,档案存放空间2a上设有档案出入口2b,档案存放空间2a的相对两侧壁上相对保持间距设有用于支撑档案底部的第一支撑台2c,第一支撑台2c与档案出入口2b配合连接。其中,第一支撑台2c上设有第二支撑台2d,方便上下两端的夹板62抓取及释放档案,且对较薄的档案起到一定的限位作用,还可适配不同宽度档案存放的需要,抓取机构60能实现准确摆放档案,不用另外整理。
47.为防止档案从夹板62之间掉落,提高夹持的可靠性并对档案进行有效防护,具体的,承载部61上设有支撑板63,支撑板63位于两相对的夹板62之间的下方。且夹板62分别位于齿条73的外端。
48.提取档案时,支撑板63插入第一支撑台2c之间的间隙中,对档案起到支撑的作用,夹板62伸入第二支撑台2d之间以夹取档案,码放档案时,夹板62伸入第二支撑台2d之间并松开档案时,便于支撑板63从底部间隙顺利退出,提高档案抓取及码放的定位精度。
49.其中,抓取机构60上设有rfid读写器天线(未示出),档案出入口2b或档案上设有rfid标签(未示出)。抓取机构60与待抓取的档案架或档案上的rfid标签配合使用,以实现精准抓取和码放档案。
50.其中,档案出入架上设有若干档案出入空间,档案出入空间的两端分别设有开口,外端的开口与档案出入窗口1a连通。除此之外,档案出入空间内设有与档案存放空间2a的第一支撑台2c和第二支撑台2d相同的结构,在此为节省篇幅不再赘述。
51.优选的,滑架3包括相对设置在档案架2两端的定轨架5,定轨架5与档案架2的长度方向垂直设置,相对的两定轨架5上滑动设有位于档案架2上方的动轨6,动轨6与档案架2平行设置,升降装置10滑动设于动轨6上,搬运驱动机构分别驱动动轨6沿着定轨架5移动及升降装置10沿着动轨6移动。
52.优选地,夹板控制机构70包括驱动电机71、齿轮72以及相对设置在齿轮72外侧的齿条73,驱动电机71安装在承载部61上,驱动电机71的输出轴上安装有齿轮72,夹板62安装在齿条73上,齿条73分别与齿轮72相啮合。
53.具体的,承载部61包括外壳611及沿竖向安装在外壳611内的第三安装板612,支撑板63的上端穿过外壳611固定在第三安装板612上或固定在驱动电机71上,驱动电机71的输出轴穿过外壳611及第三安装板612设置,齿条73相对错位安装在第三安装板612上,两齿条73上固定有相对设置的夹板座613,夹板62固定在夹板座613上,第三安装板612上设有沿水平设置的导向条614,夹板座613的背面设有与导向条614滑动配合的滑槽,外壳611上设有允许夹板62穿过并沿其水平滑动的滑孔611a,第三安装板612上设有用于允许齿轮72穿过的安装孔。
54.本实施例中,在步骤s13中,利用rfid扫描天线识别读取文档上rfid标签对取档装置中的文档类型、编号及数量进行监测,其方式对放入档案架2的文档存储空间2a中的文档进行核实其所放置的文档是否正确匹配,是否与入档者输入的档案编号、类型对应匹配进行协助无人库房平台计算处理。
55.本实施例中,根据需要取放的文档位置、类型、编号及数量信息进行计算x轴位移量、y轴位移量、z轴位移量和旋转角度的度数,以使自由位移机械手位移至对应位置的无人库房文档存储空间处或者位移至取档装置的入档口处,其方式充分体现了自动自由位移进行文档存放及拿取的操作,提升存放、拿取的效率。
56.本实施例中,自由位移机械手上的视觉定位摄像头进行监测机械手是否到达对应位置的无人库房文档存储空间处或者位移至取档装置的入档口处,监测到达时生成取档指令或还档指令以驱动自由位移机械手位移进行文档存放或抓取,其保证使自由位移机械手位移至对应位置的无人库房文档存储空间处或者位移至取档装置的入档口处,提升取档、还档的准确性。
57.本实施例中,自由位移机械手上的rfid文档识别模块,监测所拿取的文档类型和编号是否与取档者录入的文档类型和编号对应匹配,以对入库文档和出库文档进行核实是否拿取正确。其保证取档、还档中的文档类型和编号是与取档者、还档者所输入的文档类型和编号是对应匹配的。
58.本实施例中,在步骤s21中,取档装置监测文档放入时间,当文档放入之间达到设定的延时时长后,生成还档指令进行驱动自由位移机械手位移将未在设定时间内取走的文档进行抓取并输送至原位,其避免出现取档装置被长时间占用而导致其他用户无法进行取档或还档的现象。
59.本实施例中,在步骤s22中,通过人脸识别验证的数据与身份卡中的人脸数据进行配对来获取待取文档的编号、类型及数量,并显示在取档操作界面中。其使得对取档者予以确认所取文档是否与所输入取档的编号、数量及类型进行核对,以避免出现取档错误现象,并且其方式保证所取文档时取档者需要拿取的文档。
60.本实施例中,在步骤s13中,对于取档装置得到文档入库信息后臭氧发生器启动对文档进行消毒;
61.若监测出文档所放入的文档类型、编号及数量与所选择的入库文档类型、编号及数量不匹配,则关闭臭氧发生器;
62.若监测出文档所放入的文档类型、编号及数量与所选择的入库文档类型、编号及数量对应匹配,则在设定时长内正常开启臭氧发生器,在消毒完毕后,形成还还档指令,并进入步骤s14。其方式实现对文档进行消毒操作。
63.本实施例中,
64.本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。