1.本实用新型涉及医疗器械技术领域,特别是涉及一种锥度转换器。
背景技术:
2.手术导航系统越来越多地应用在骨科手术中,利用该系统可以将患者的影像数据与患者生理结构准确关联,辅助术者执行手术规划,并引导术者操作手术器械。手术导航系统使得骨科手术更加精准、迅速和安全。骨科导航手术通常需要用到关节机器人和可以被关节机器人识别的示踪器,其中,示踪器可被设置在患者或者其他一些器械上,关节机器人则可根据示踪器的位置确定患者、患者影像以及器械之间的相对位置关系,继而便于后续的手术操作。
3.以全髋关节置换术为例,关节机器人辅助下的全髋关节置换术过程中,需要将示踪器和股骨柄假体的锥度连接,以精准定位股骨柄假体的三维空间位置,测量关节股骨柄的前倾角。然而,现有的示踪器往往只有一种规格的连接接口,而股骨柄假体端部的锥度却有不同的规格大小,因此,示踪器与不同规格的股骨柄假体之间常常会由于不能匹配而导致连接不牢靠,进而导致示踪器定位不准确,影响股骨柄假体的植入效果。
技术实现要素:
4.本实用新型实施例的目的是提供一种锥度转换器,以将不同规格的股骨柄假体与示踪器可靠连接,提高示踪器的定位精确性。
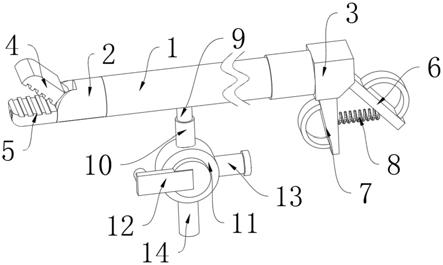
5.本实用新型实施例提供了一种锥度转换器,所述锥度转换器用于将股骨柄假体与示踪器连接,所述股骨柄假体用于插入股骨髓腔中,所述示踪器包括支架以及设置在所述支架上的示踪元件,所述支架具有连接口;
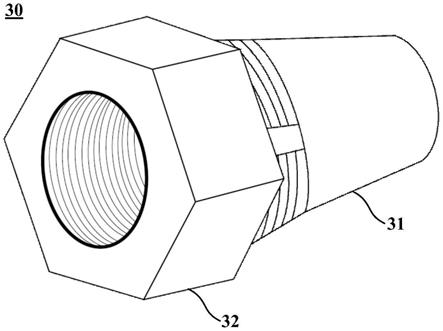
6.所述锥度转换器包括连接部和锁紧螺母,所述连接部包括第一端和第二端,所述第一端用于与所述连接口固定连接,所述第二端具有可套设于所述股骨柄假体的近端的弹性套筒,所述套筒的外壁设置有与所述锁紧螺母适配的螺纹,且所述弹性套筒上设置有沿轴向延伸的缺口;所述锁紧螺母与所述弹性套筒螺纹联接。
7.在一些可能的实施方案中,由所述第一端指向所述第二端的方向,所述弹性套筒的内径逐渐增大。
8.在一些可能的实施方案中,所述弹性套筒的内壁设置有橡胶垫。
9.在一些可能的实施方案中,所述橡胶垫粘接于所述弹性套筒的内壁。
10.在一些可能的实施方案中,所述第一端与所述连接口插接连接。
11.在一些可能的实施方案中,所述第一端的直径小于所述锁紧螺母的内径。
12.在一些可能的实施方案中,所述缺口的数量为至少一个,至少一个所述缺口沿所述弹性套筒的周侧等间隔设置。
13.在本实用新型提供的锥度转换器,在将股骨柄假体与示踪器连接时,首先将弹性套筒套设于股骨柄假体的近端,然后通过锁紧螺母将弹性套筒锁定在股骨柄假体上,最后
将示踪器的连接口与连接部的第一端固定连接。由于弹性套筒上设置有缺口,配合其自身的弹性特性,使得弹性套筒的内径可根据其所连接的股骨柄假体的锥度进行适应性调整,这样即可使弹性套筒可适配各种规格尺寸的股骨柄假体,进而可以通过锥度转换器将不同尺寸规格的股骨柄假体与示踪器可靠连接,保证示踪器的定位精确性。
附图说明
14.图1为本实用新型实施例提供的股骨柄假体的结构示意图;
15.图2为本实用新型实施例提供的示踪器的结构示意图;
16.图3为本实用新型实施例提供的锥度转换器的结构示意图;
17.图4为本实用新型实施例提供的连接部的结构示意图;
18.图5为本实用新型实施例提供的锁紧螺母的结构示意图。
19.附图标记:
20.10-股骨柄假体;11-股骨柄假体的近端;12-股骨柄假体的远端;20-示踪器;
21.21-支架;22-示踪元件;211-连接口;30-锥度转换器;31-连接部;
22.32-锁紧螺母;311-连接部的第一端;312-连接部的第二端;313-弹性套筒;314-缺口。
具体实施方式
23.为了将不同规格的股骨柄假体与示踪器可靠连接,提高示踪器的定位精确度,本实用新型实施例提供了一种锥度转换器。为使本实用新型的目的、技术方案和优点更加清楚,以下举实施例对本实用新型作进一步详细说明。
24.本实用新型实施例提供了一种锥度转换器,该锥度转换器可用于将股骨柄假体与示踪器连接。首先参考图1所示,图1为本实用新型实施例提供的股骨柄假体的结构示意图。股骨柄假体10可插入股骨髓腔中,由此代替缺损的股骨段。股骨柄假体10可包括近端11和远端12,股骨柄假体10的近端11和远端12可分别为圆台状结构,且对于不同规格尺寸的股骨柄假体10来说,其近端11及远端12的锥度也有所不同。
25.参考图2所示,图2为本实用新型实施例提供的示踪器的结构示意图。示踪器20可包括支架21以及设置在支架21上的示踪元件22,另外,支架21上还设置有可用于与锥度转换器连接的连接口211。示例性地,支架21可大致为十字型结构,连接口211可设置在支架21的其中一个分支的端部。示踪元件22可以为一个或多个,图2中以三个示踪元件22为例进行说明,此时,三个示踪元件22可分别设置在支架21的另外三个分支的端部,这样,根据三个示踪元件22的位置,关节机器人可以在不同的角度及方向下对股骨柄假体进行跟踪、识别,从而降低股骨柄假体无法被关节机器人捕捉到的风险。
26.一并参考图3、图4和图5所示,参考图3所示,图3为本实用新型实施例提供的锥度转换器的结构示意图,图4为本实用新型实施例提供的连接部的结构示意图,图5为本实用新型实施例提供的锁紧螺母的结构示意图。在本实用新型实施例中,锥度转换器30可包括连接部31和锁紧螺母32。其中,连接部31可包括第一端311和第二端312,第一端311可用于与示踪器的连接口固定连接,第二端312则具有弹性套筒313,该弹性套筒313可套设于股骨柄假体的近端。弹性套筒313的周侧设置有缺口314,该缺口314可沿弹性套筒313的轴向延
伸,另外,弹性套筒313的外壁还设置有与锁紧螺母32相匹配的螺纹,锁紧螺母32可与弹性套筒313螺纹联接。
27.一并参考图1至图5所示,在使用该锥度转换器30将股骨柄假体10与示踪器20连接时,可首先将弹性套筒313套设在股骨柄假体10的近端。然后,将锁紧螺母32由连接部31的第一端311套设在连接部31上,可以理解的,连接部31的第一端311的直径应当小于锁紧螺母32的内径,以便于锁紧螺母32能够由连接部31的第一端311向第二端312移动。当锁紧螺母32移动到弹性套筒313上之后,继续拧动锁紧螺母32使其沿弹性套筒313的轴向移动,直至锁紧螺母32将弹性套筒313锁紧在股骨柄假体10的近端11,实现连接部31与股骨柄假体10的固定连接。最后,将示踪器20的连接口211与连接部31的第一端311固定连接,如此即可通过锥度转换器30实现股骨柄假体10与示踪器20的连接。应当理解的是,由于弹性套筒313上设置有缺口314,配合其自身的弹性特性,使得弹性套筒313的内径可根据其所连接的股骨柄假体10的锥度进行适应性调整,这样即可使弹性套筒313可适配各种规格尺寸的股骨柄假体10,进而可以通过锥度转换器30将不同尺寸规格的股骨柄假体10与示踪器20可靠连接,保证示踪器20的定位精确性。
28.连接部31的第一端311与示踪器20的连接口211之间的连接方式不限,示例性地,两者之间可插接连接,也即,连接部31的第一端311可插接于连接口211内,由此实现锥度转换器30与示踪器20的固定连接。
29.在一些可能的实施例中,由连接部31的第一端311指向其第二端312的方向,弹性套筒313的内径可逐渐增大,也就是说,弹性套筒313可以为扩口结构,这样,弹性套筒313的内壁形状可以与股骨柄假体10的近端的圆台状结构更加匹配,从而有利于进一步提高锥度转换器30与股骨柄假体10的连接可靠性。
30.另外,弹性套筒313上所设置的缺口314的数量可以为一个,或者也可以为多个,本实用新型对此不作限制,例如图4中以三个缺口314为例进行说明。采用这种设计,可以降低对弹性套筒313的内径的调整难度,进而可以提高将弹性套筒313套设在股骨柄假体10上的便利性。可以理解的,当缺口314的数量为多个时,多个缺口314可等间隔设置在弹性套筒313的周侧,这样一方面可以保证弹性套筒313的结构强度,另一方面还可以进一步提高将弹性套筒313套设在股骨柄假体10上的便利性。
31.在一些可能的实施例中,为了减小损坏股骨柄假体10的风险,弹性套筒313的内壁还可设置有橡胶垫,以降低弹性套筒313对股骨柄假体10的近端的磨损。具体实施时,橡胶垫具体可通过粘胶粘接固定在弹性套筒313上。
32.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。