1.本实用新型属于理袋机技术领域,特别是涉及一种快速叠袋装置及智能理袋机器人。
背景技术:
2.随着经济的不断发展,食品、蔬菜等不在是单纯的满足人们自身的需求,人还可以将其包装起来卖给其他的消费者,因此,包装袋拥有非常非常广阔的市场。理袋机作为一种智能理袋机构,可以自动完成包装袋的检测、不合格包装袋的排废,以及成捆包装袋的捆扎等工作,大大减少了人工检查的成本。
3.叠袋装置作为理袋机器人的输送包装袋的核心部件,其可以将多个包装袋堆输送至储料箱中。但是,现有技术中的叠袋装置存在着拆装困难等技术问题。
技术实现要素:
4.本实用新型针对现有技术中快速叠袋装置存在着拆装困难的技术问题,提供了一种快速叠袋装置及智能理袋机器人。
5.鉴于以上技术问题,本实用新型实施例提供一种快速叠袋装置,包括料叉组件、驱动组件以及导流箱,所述导流箱包括固定组件、盖板、第一隔板、第二隔板以及设有通槽的背板;所述第一隔板、所述第二隔板以及所述背板均通过所述固定组件可拆卸安装在所述盖板上,且所述第一隔板、所述第二隔板、所述背板以及所述盖板之间围成输送空间;
6.所述驱动组件的输出端连接所述料叉组件,所述料叉组件远离所述驱动组件的一端穿过所述通槽并伸入所述输送空间中。
7.可选地,所述第一隔板上设有第一翻边,所述盖板上设有第一长条形通孔,所述固定组件包括第一固定件;所述第一隔板通过穿过所述第一长条形通孔并连接所述第一翻边的所述第一固定件可拆卸安装在所述盖板上。
8.可选地,所述第一固定件包括第一把手和第一连接杆,所述第一连接杆的一端连接所述第一把手,所述连接杆的另一端穿过所述第一长条形通孔并连接所述第一翻边。
9.可选地,所述快速叠袋装置还包括基座,所述盖板和所述驱动组件均安装在所述基座上。
10.可选地,所述驱动组件包括第一叉料驱动件和第二叉料驱动件;所述料叉组件包括连接在所述第一叉料驱动件输出端的第一料叉和连接在所述第二叉料驱动件输出端的第二料叉;所述第一料叉和所述第二料叉均穿过所述通槽伸入所述输送空间中,且所述第二料叉位于所述第一料叉的上方。
11.可选地,所述第一叉料驱动件包括第一气缸、第一伸缩杆和第一导流杆,所述第一气缸上设有第一驱动孔和第一导流孔;所述第一伸缩杆的一端连接所述第一料叉,且所述第一伸缩杆的另一端安装在所述第一驱动孔中;所述第一导流杆的一端连接所述第一料叉,且所述第一导流杆的另一端插入在所述第一导流孔中;所述第一伸缩杆和所述第一导
流杆平行设置。
12.可选地,所述第二叉料驱动件包括第二气缸、第二伸缩杆和第二导流杆,所述第二气缸上设有第二驱动孔和第二导流孔;所述第二伸缩杆的一端连接所述第二料叉,且所述第二伸缩杆的另一端安装在所述第二驱动孔中;所述第二导流杆的一端连接所述第二料叉,且所述第二导流杆的另一端插入在所述第二导流孔中;所述第二伸缩杆和所述第二导流杆平行设置。
13.可选地,所述快速叠袋装置还包括拍齐驱动件和用于拍齐所述料叉上的包装袋的拍齐板;所述拍齐板连接所述拍齐驱动件的输出端。
14.本实用新型另一实施例还提供了一种智能理袋机器人,包括上述的快速叠袋装置。
15.可选地,所述智能理袋机器人还包括输送检测装置、排废装置、送料装置、机械手装置以及扎带装置;所述输送检测装置用于检测和输送包装袋,所述排废装置用于排除所述输送检测装置上的不合格的包装袋,所述送料装置用于将所述快速叠袋装置输送的包装袋输送至所述机械手装置;所述机械手装置用于将堆叠在所述送料装置中多个所述包装袋输送至所述扎带装置,所述扎带装置用于捆扎多个所述包装袋。
16.本实用新型中,所述导流箱包括固定组件、盖板、第一隔板、第二隔板以及设有通槽的背板,所述第一隔板、所述第二隔板以及所述背板均通过所述固定组件可拆卸安装在所述盖板上;通过所述固定组件即可将所述第一隔板、所述第二隔板以及所述背板可拆卸安装在所述盖板上,便于该导流箱的拆装,且该导流箱的结构简单,制造成本低。另外,当所述输送空间中的包装袋出现折叠等现象上,工作人员可以直接通过所述固定组件将所述盖板从所述导流箱上打开,从而便于工作人员对所述输送空间中包装袋的处理。
附图说明
17.下面结合附图和实施例对本实用新型进一步说明。
18.图1为本实用新型一实施例提供的快速叠袋装置的结构示意图;
19.图2为本实用新型一实施例提供的快速叠袋装置的部分结构示意图;
20.图3为本实用新型一实施例提供的快速叠袋装置的导流箱的结构示意图;
21.图4为本实用新型一实施例提供的智能理袋机器人的结构示意图。
22.说明书中的附图标记如下:
23.100、快速叠袋装置;1、料叉组件;11、第一料叉;12、第二料叉;2、驱动组件;21、第一叉料驱动件;211、第一气缸;212、第一伸缩杆;213、第一导流杆;22、第二叉料驱动件;3、导流箱;31、固定组件;311、第一固定件;32、盖板;321、第一长条形通孔;33、第一隔板;331、第一翻边;34、第二隔板;35、背板;351、通槽;36、输送空间;4、基座;5、齐驱动件;6、拍齐板;101、输送检测装置;102、排废装置;103、送料装置;104、机械手装置;105、扎带装置。
具体实施方式
24.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
25.需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本实用新型的限制。
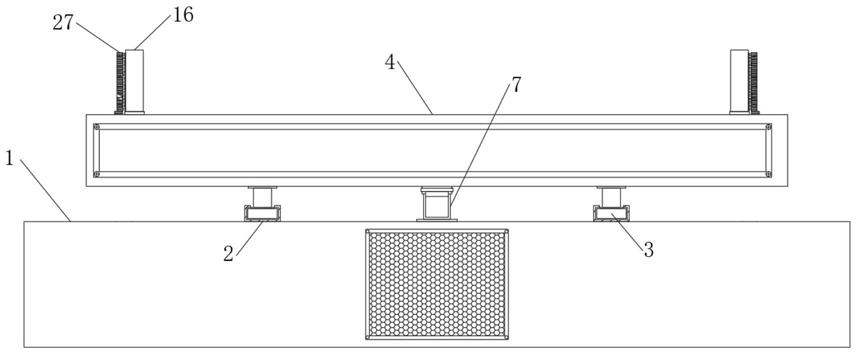
26.如图1和图2所示,本实用新型一实施例提供了一种快速叠袋装置100,包括料叉组件1、驱动组件2以及导流箱3,所述导流箱3包括固定组件31、盖板32、第一隔板33、第二隔板34以及设有通槽351的背板35;所述第一隔板33、所述第二隔板34以及所述背板35均通过所述固定组件31可拆卸安装在所述盖板32上,且所述第一隔板33、所述第二隔板34、所述背板35以及所述盖板32之间围成输送空间36;可以理解地,所述驱动组件2包括但不限于电机、气压缸以及液压缸等;具体地,所述第一隔板33和所述第二隔板34安装在所述盖板32的左右两侧,所述背板35安装在所述盖板32的后侧,且所述输送空间36的前端和下端分别设有第一开口和第二开口,所述第一开口与智能理袋机器人的输送检测装置101连通,所述第二开口与智能理袋机器人的料框连通。
27.所述驱动组件2的输出端连接所述料叉组件1,所述料叉组件1远离所述驱动组件2的一端穿过所述通槽351并伸入所述输送空间36中。
28.具体地,当智能理袋机器人的输送检测装置101将一个一个的包装袋输送至所述输送空间36中,所述输送空间36中的料叉组件1接收预设数量的包装袋后,所述驱动组件2驱动所述料叉组件1从所述通槽351退出所述输送空间36,所述料叉组件1上的包装袋由于所述背板35的阻挡作用,将从所述输送空间36的下方掉落至料框中。
29.本实用新型中,所述导流箱3包括固定组件31、盖板32、第一隔板33、第二隔板34以及设有通槽351的背板35,所述第一隔板33、所述第二隔板 34以及所述背板35均通过所述固定组件31可拆卸安装在所述盖板32上;通过所述固定组件31即可将所述第一隔板33、所述第二隔板34以及所述背板 35可拆卸安装在所述盖板32上,便于该导流箱3的拆装,且该导流箱3的结构简单,制造成本低。另外,当所述输送空间36中的包装袋出现折叠等现象上,工作人员可以直接通过所述固定组件31将所述盖板32从所述导流箱3 上打开,从而便于工作人员对所述输送空间36中包装袋的处理。
30.在一实施例中,如图3所示,所述第一隔板33上设有第一翻边331,所述盖板32上设有第一长条形通孔321,所述固定组件31包括第一固定件311;所述第一隔板33通过穿过所述第一长条形通孔321并连接所述第一翻边331 的所述第一固定件311可拆卸安装在所述盖板32上。可以理解地,所述第一固定件311包括但不限于螺栓、螺钉等,通过调整所述第一固定件311与所述第一长条形通孔321的连接位置,即可调整所述第一隔板33在所述盖板32 上的连接位置,也即可以调整所述输送空间36的大小和形状。另外,从上方即可将所述第一隔板33安装在所述盖板32上,以及从上方即可将所述盖板 32从所述第一隔板33上拆卸下来,进一步提高了该导流箱3拆装的便捷性。
31.在一实施例中,如图3所示,所述第一固定件311包括第一把手和第一连接杆,所述第一连接杆的一端连接所述第一把手,所述第一连接杆的另一端穿过所述第一长条形通孔321并连接所述第一翻边331。可以理解地,通过转动所述第一把手,即可转动所述第一连接杆,从而可以实现所述第一连接杆与所述第一翻边331的连接或分离。本实施例中,所述第一把手和所述第一连接杆的设计,进一步提高了该导流箱3拆装的便捷性。
32.进一步地,如图1至图3所示,所述第二隔板34、所述背板35与所述第一隔板33的形状相同或相似,以及所述第二隔板34、所述背板35与所述盖板32的连接形式与所述第一隔板33和所述盖板32的连接形式相同,在此就不再赘述。
33.在一实施例中,如图1和图2所示,所述快速叠袋装置100还包括基座4,所述盖板32和所述驱动组件2均安装在所述基座4上。可以理解地,所述基座4可以起到支撑所述驱动组件2以及所述导流箱3的作用。
34.在一实施例中,如图1所示,所述驱动组件2包括第一叉料驱动件21和第二叉料驱动件22;所述料叉组件1包括连接在所述第一叉料驱动件21输出端的第一料叉11和连接在所述第二叉料驱动件22输出端的第二料叉12;所述第一料叉11和所述第二料叉12均穿过所述通槽351伸入所述输送空间36 中,且所述第二料叉12位于所述第一料叉11的上方。可以理解地,智能理袋机器人的输送检测装置101持续将包装袋通过所述输送空间36输送至所述第一料叉11上,此时,所述第一料叉11位于所述输送空间36,而所述第二料叉12退出所述第一输送空间36;当所述第一料叉11上储存有第一预设数量(第一预设数量可以根据实际需求来确定,例如10个、15个等)的包装袋后,所述第一叉料驱动件21驱动所述第一料叉11退出所述输送空间36,所述第二叉料驱动件22驱动所述第二料叉12伸入所述输送空间36中,且所述第一料叉11退出所述输送空间36的过程中,所述第一料叉11上的包装袋将从下方掉落至智能理袋机器人的料框中;在所述第一料叉11输送包装袋的过程中,所述第二料叉12接收输送检测装置101输送的包装袋;从而该双层快速叠袋装置100可以持续不断的接收包装袋,不会出现等待接料的问题,大大提高了快速叠袋装置100输送包装袋的效率。
35.在一实施例中,如图1所示,所述第一叉料驱动件21包括第一气缸211、第一伸缩杆212和第一导流杆213,所述第一气缸211上设有第一驱动孔和第一导流孔;所述第一伸缩杆212的一端连接所述第一料叉11,且所述第一伸缩杆212的另一端安装在所述第一驱动孔中;所述第一导流杆213的一端连接所述第一料叉11,且所述第一导流杆213的另一端插入在所述第一导流孔中;所述第一伸缩杆212和所述第一导流杆213平行设置。作为优选,所述第一气缸211上设有两个所述第一导流孔,且两个所述第一导流孔分别位于所述第一驱动孔的左右两侧;对应地,所述第一导流杆213也设置有两个,两个所述第一导流杆213分别安装在两个所述第一导流孔中。具体地,所述第一气缸211通过所述第一伸缩杆212带动所述第一料叉11前移或后退的过程中,所述第一导流杆213在所述第一导流孔中滑动。本实施例中,所述第一叉料驱动件21的设计,提高了所述第一料叉11移动的稳定性,以及提高了所述第一料叉11的承重能力,且所述第一叉料驱动件21的控制方便。
36.在一实施例中,如图1所示,所述第二叉料驱动件22包括第二气缸、第二伸缩杆和第二导流杆,所述第二气缸上设有第二驱动孔和第二导流孔;所述第二伸缩杆的一端连接所述第二料叉12,且所述第二伸缩杆的另一端安装在所述第二驱动孔中;所述第二导流杆的一端连接所述第二料叉12,且所述第二导流杆的另一端插入在所述第二导流孔中;所述第二伸缩杆和所述第二导流杆平行设置。作为优选,所述第二气缸上设有两个所述第二导流孔,且两个所述第二导流孔分别位于所述第二驱动孔的左右两侧;对应地,所述第二导流杆也设置有两个,两个所述第二导流杆分别安装在两个所述第二导流孔中。具体地,所述第二气缸通过所述第二伸缩杆带动所述第二料叉12前移或后退的过程中,所述第二导流杆在所述第二导流孔中滑动。本实施例中,所述第二叉料驱动件22的设计,提高了所述第二料叉
12移动的稳定性,以及提高了所述第二料叉12的承重能力,且所述第二叉料驱动件22的控制方便。
37.在一实施例中,如图1所示,所述快速叠袋装置100还包括拍齐驱动件5 和用于拍齐所述料叉上的包装袋的拍齐板6;所述拍齐板6连接所述拍齐驱动件5的输出端。可以理解地,所述拍齐驱动件5包括但不限于气压缸、液压缸、直线电机、丝杆螺母机构等;且所述拍齐板6位于所述输送空间36的前方。具体地,当所述料叉组件1上储存有包装袋后,所述拍齐驱动件5带动所述拍齐板6前移,所述拍齐板6将所述料叉组件1上的包装袋拍打整齐。本实施例中,所述拍齐驱动件5和所述拍齐板6的设置,提高了所述输送空间36中包装袋的整齐度,从而便于该快速叠袋装置100输送包装袋。
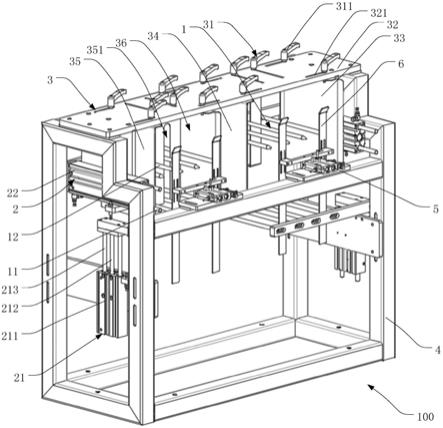
38.如图4所示,本实用新型另一实施例还提供了一种智能理袋机器人,包括上述的快速叠袋装置100。
39.在一实施例中,如图4所示,所述智能理袋机器人还包括输送检测装置 101、排废装置102、送料装置103、机械手装置104以及扎带装置105;所述输送检测装置101用于检测和输送包装袋,所述排废装置102用于排除所述输送检测装置101上的不合格的包装袋,所述送料装置103用于将所述快速叠袋装置100输送的包装袋输送至所述机械手装置104;所述机械手装置104 用于将堆叠在所述送料装置103中多个所述包装袋输送至所述扎带装置105,所述扎带装置105用于捆扎多个所述包装袋。
40.具体地,所述输送检测装置101包括传输带和安装在所述输送带上方的视觉相机,所述传输带可以传输包装袋,所述视觉相机对所述传输带上的包装袋进行拍照,并通过处理器与合格的包装袋图档进行对比,从而可以识别包装袋是否合格;当所述视觉相机检测到包装袋不合格时,所述排废装置102 将所述传输带上的不合格包装袋输送至废料箱中;合格的包装袋将被所述传输带持续传输至所述快速叠袋装置100;所述双层快速叠袋装置100的第一料叉11上堆叠有第一预设数量的包装袋后,通过所述第一料叉11将其输送至所述送料装置103的料框,所述料框转动180度。当所述第二料叉12上堆叠有第一预设数量的包装袋后,所述第二料叉12将其中的包装袋输送至所述送料装置103的料框中(此时,所述第一料叉11又开始接收包装袋);所述机械手装置104将所述送料装置103中的包装袋抓取至扎带装置105上,所述扎带装置105将一摞(第一预设数量的两倍)包装袋扎带处理,从而工作人员可以将已经检测合格和捆扎的包装袋进行装箱打包。该智能理袋机器人可以自动完成包装袋的检测,不合格安装的剔除,合格安装带的捆扎等工作,提高了包装袋的检测效率和监测质量。
41.以上仅为快速叠袋装置的实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。