1.本发明属于运动轨迹分析领域,具体涉及一种长跑运动轨迹异常检测方法。
背景技术:
2.随着定位技术和服务端存储能力的不断提升,定位设备在长跑运动中的使用日益普遍。运动员在户外长跑过程中,运动轨迹可能因为一些因素而发生异常,例如遇到极端天气、产生突发性疾病或对赛道的不熟悉导致迷路,使得运动员出现不同于正常移动模式的行为。长跑运动轨迹数据在记录运动员规律长跑足迹的同时,也隐含了他们的异常移动行为信息,反映了不利因素对运动员的比赛影响,间接记录了事件的过程。从多个维度对运动员的长跑运动轨迹进行异常分析,可以有效防止这些风险发生。而仅用传统方法难以处理复杂多维的长跑运动轨迹数据,因此,一种基于规则与深度学习相结合的分析方法被提出。
3.由于轨迹数据具有复杂多变的特性,目前没有统一适合所有场景的理论与技术出现,因目标类型,应用场景不同只能采用不同的轨迹数据分析方法。目前,对运动轨迹数据的异常分析多基于距离算法,根据人员空间位置数据与赛道轨迹信息比较得到相似度,再根据相似度作出判别。但在实际过程中,可能存在设备自身定位故障导致的漂移或静止数据,仅考虑轨迹相似度,容易对运动员是否存在异常状况作出错误判断。现有的轨迹异常分析不精确,因此无法对运动员提供准确帮助。
技术实现要素:
4.本发明的目的在于提供一种长跑运动轨迹异常检测方法,能够快速准确对运动员的轨迹异常进行分析。
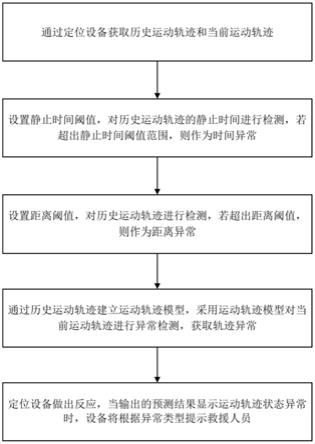
5.本发明提供的这种长跑运动轨迹异常检测方法,包括如下步骤:
6.s1.获取历史运动轨迹;
7.s2.通过历史运动轨迹建立运动轨迹模型;
8.s3.通过定位设备获取当前运动轨迹;
9.s4.采用静止时间对当前运动轨迹进行异常检测,并获取时间异常;采用轨迹偏离距离对当前运动轨迹进行异常检测,并获取距离异常;采用运动轨迹模型对当前运动轨迹进行异常检测,并获取轨迹异常;
10.s5.定位设备将做出反应,当输出的预测结果显示运动轨迹状态异常时,设备将根据异常类型提示救援人员。
11.所述的步骤s4,采用静止时间对当前运动轨迹进行异常检测,包括设置静止时间阈值,对当前运动轨迹的静止时间进行检测,若超出静止时间阈值范围,则作为时间异常。
12.所述的步骤s4,采用轨迹偏离距离对当前运动轨迹进行异常检测,包括对当前运动轨迹与赛道之间的距离进行检测,若超出距离阈值,则作为距离异常。
13.所述的步骤s2,包括如下步骤:
14.a1.对历史运动轨迹进行切片,设置滑动窗口大小和滑动窗口步长,并根据运动员
求救数据对每一个轨迹切片加上对应的异常标签,然后根据得到的轨迹切片和对应的异常标签进行后续训练运动轨迹模型;
15.a2.根据运动员每一时刻的运动方向与水平线正方向形成的夹角,计算运动员的行进角度;
16.a3.采用卷积神经网络求解运动轨迹模型。
17.所述的步骤a3,包括如下步骤:
18.b1.通过步骤a2计算运动员的行进角度,并根据最远的点的集合求解运动员从行进距离;生成运动员的行进距离系列和行进角度序列;对运动员轨迹坐标序列、运动员的行进距离系列和行进角度序列进行插值,并进行归一化;并将处理后的数据存储到数据库;
19.b2.将步骤b1获取的归一化后的运动员轨迹坐标序列,归一化后的运动员行进距离序列和归一化后的运动员行进角度序列分别输入到3个卷积层进行特征提取,并输出时序数据;
20.b3.采用lstm层处理步骤b2输出的时序数据;
21.b4.将第一lstm层、第二lstm层和第三lstm层的输出值进行合并;
22.b5.将合并后得到的值作为输入值输入到全连接层,通过线性加权求和,得到全连接层的输出值;
23.b6.采用步骤b1-b5求得的运动轨迹模型获取异常分数,并将异常分数与异常阈值对比,若异常分数大于异常阈值,则输出为深度学习模型检测出的异常,否则,输出结果为正常。
24.所述的步骤a2,计算运动员的行进角度,包括计算运动员从t时刻到t 1时刻的行进角度b
t
:
[0025][0026]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;x
t 1
表示运动员在t 1时刻位置的经度;y
t 1
表示运动员在t 1时刻的纬度。
[0027]
所述的步骤b1,包括通过步骤a2计算运动员从t时刻到t 1时刻的行进角度b
t
,并求解运动员从t时刻到t 1时刻的行进距离e
t
:
[0028][0029]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;运动
员轨迹坐标序列表示为h,h=(x1,y1,x2,y2,x3,y3,...,x
l
,y
l
),l表示运动员在长跑过程中的最后时刻;r表示地球半径;
[0030]
设运动员的行进距离系列e和行进角度序列b分别为:e=(e1,e2,e3,...,e
l-1
),b=(b1,b2,b3,...,b
l-1
);
[0031]
对运动员轨迹坐标序列h、运动员的行进距离系列e和行进角度序列b进行插值,包括:
[0032][0033][0034][0035][0036]
其中,表示插值后得到的运动员轨迹坐标,表示插值后得到的运动员轨迹经度,表示插值后得到的运动员轨迹纬度;m
t
表示插值后得到的运动员行进距离;α
t
表示插值后得到的运动员行进角度;ω表示时刻对应的权重系数:tk表示原始序列中第k个点对应的时间;t
k 1
表示原始序列中第k 1个点对应的时间;
[0037]
得到插值后的运动员轨迹坐标序列p、插值后的运动员行进距离序列m和插值后的运动员行进角度序列a,分别表示为:
[0038][0039]
m=(m1,m2,m3,...,m
l-1
)
[0040]
a=(α1,α2,α3,...,α
l-1
)
[0041]
其中,l表示运动员在长跑过程中的最后时刻;采用min-max标准化方法,对插值后的运动员轨迹坐标序列p、插值后的运动员行进距离序列m和插值后的运动员行进角度序列a分别进行归一化:
[0042][0043][0044]
[0045][0046]
其中,表示插值后得到的运动员轨迹经度,表示插值后得到的运动员轨迹纬度;表示归一化后得到的运动员轨迹经度;表示归一化后得到的运动员轨迹纬度;表示归一化后得到的运动员行进距离;表示归一化后得到的运动员行进角度;m
t
表示插值后得到的运动员行进距离;α
t
表示插值后得到的运动员行进角度;表示插值后得到的运动员轨迹经度的最小值;表示插值后得到的运动员轨迹经度的最大值;表示插值后得到的运动员轨迹纬度的最小值;表示插值后得到的运动员轨迹纬度的最大值;min(m
t
)表示插值后得到的运动员行进距离的最小值;max(m
t
)表示插值后得到的运动员行进距离的最大值;min(α
t
)表示插值后得到的运动员行进角度的最小值;max(α
t
)表示插值后得到的运动员行进角度的最大值;求得归一化后的运动员轨迹坐标序列p
*
,归一化后的运动员行进距离序列m
*
和归一化后的运动员行进角度序列a
*
:
[0047][0048][0049][0050]
其中,t表示运动员在长跑过程中的某一时刻;l表示运动员在长跑过程中的最后时刻;表示归一化后的运动员在最后时刻的坐标;表示归一化后的运动员在最后时刻的行进距离;表示归一化后的运动员在最后时刻的行进角度;并将处理后的数据存储到数据库;
[0051]
所述的步骤b2,包括将步骤b1获取的归一化后的运动员轨迹坐标序列p
*
,归一化后的运动员行进距离序列m
*
和归一化后的运动员行进角度序列a
*
分别输入到3个卷积层中,并计算相应的实际输出,时序数据包括轨迹卷积层oc
1,i
、距离卷积层oc
2,i
和角度卷积层oc
3,i
:
[0052][0053][0054][0055]
其中,oc
1,i
表示轨迹卷积层输出的一维序列的第i位数据;oc
2,i
表示距离卷积层的
一维序列的第i位数据;oc
3,i
表示交底卷积层的一维序列的第i位数据;j表示卷积核的个数;hj表示卷积核;p
i j-1
表示输入的归一化后的运动员轨迹的经纬度坐标序列值;m
i j-1
表示输入的归一化后的运动员的行进距离序列值;a
i j-1
表示输入的归一化后的运动员的行进角度序列值;
[0056]
所述的步骤b3中的lstm层为长短期记忆人工神经网络层,包括:
[0057]it
=σ(w
il
l
t
w
irst-1
w
icct-1
bi)
[0058]ft
=σ(w
fl
l
t
w
frst-1
w
fcct-1
bf)
[0059]gt
=σ(w
cl
l
t
w
crst-1
bc)
[0060]ct
=f
t
⊙ct-1
g
t
⊙it
[0061]ot
=σ(w
ol
l
t
w
orst-1
w
occt-1
bo)
[0062]mt
=o
t
⊙
h(c
t
)
[0063]st
=w
smmt
[0064]
其中,l为lstm层的输入值;s为lstm层的输出值;c为记忆单元;h(c
t
)为记忆单元的细胞状态;f
t
为遗忘门;g
t
为记忆门;i
t
表示输入门;o
t
为输出门w
fl
表示输入门接受的t时刻的输入的权重;w
fr
表示输入门接受的t-1时刻的lstm层的输出值的权重;w
fc
分别表示输入门接受的t-1时刻所有细胞的输入的权重;w
cl
表示遗忘门接受的输入门接受的t时刻的输入的权重;w
cr
表示遗忘门接受的t-1时刻的lstm层的输出值的权重,w
ol
表示输出值接受的t时刻的输入的权重;w
or
表示输出门接受的t-1时刻的lstm层的输出值的权重;w
oc
表示输出门接受的t-1时刻所有细胞的输入的权重,w
sm
表示记忆单元接受的两个输入的权重,b为偏置,
⊙
表示点乘。w
il
表示输入门接受的t时刻的输入权重;l
t
表示输入门接受的t时刻的输入;w
ir
表示前t-1个时刻的lstm层的输出权重;s
t-1
表示t-1时刻的lstm层的输出值;w
ic
表示输入门接受的t-1时刻所有细胞的输入权重;c
t
表示t时刻的记忆单元;c
t-1
表示输入门接受的t-1时刻所有细胞的输入;bi表示输入门的偏差;bf表示遗忘门的偏差;bc表示记忆单元的偏差;o
t
表示t时刻的输出;bo表示输出门的偏差;m
t1
表示输出到lstm的t时刻输出值的细胞状态;s
t
表示t时刻lstm的输出值;w
sm
表示记忆单元细胞状态的权重;
[0065]
将轨迹卷积层、距离卷积层和角度卷积层输出的数据分别输入到3个lstm层中,包括轨迹lstm层lstm1(
·
)、距离lstm层lstm2(
·
)和角度lstm层lstm3(
·
);
[0066]
lstm1(
·
)=lstm(i1,h1,n1)
[0067]
lstm2(
·
)=lstm(i2,h2,n2)
[0068]
lstm3(
·
)=lstm(i3,h3,n3)
[0069]
其中,i1表示轨迹lstm层的输入大小;i2表示距离lstm层的输入大小;i3表示角度lstm层的输入大小;h1表示轨迹lstm层中隐藏层的单元数;h2表示距离lstm层中隐藏层的单元数;h3表示角度lstm层中隐藏层的单元数;n1表示轨迹lstm层的层数;n2表示距离lstm层的层数;n3表示角度lstm层的层数。
[0070]
所述的步骤b4包括,将第一lstm层、第二lstm层和第三lstm层的输出值进行合并,得到:c=concat(layer1,layer2,layer3,...,layerr)
[0071]
其中,c为合并后的输出值;concat(
·
)为合并函数,layerr表示第r个待合并的层;
[0072]
所述的步骤b5包括,将合并后得到的值作为输入值输入到全连接层;在前向计算
过程时,通过线性加权求和,得到全连接层的输出值fc(c):
[0073][0074]
fc(c)=cd[0075]
其中,ci表示第i层全连接层的输入值,其中c0=c,i表示隐藏层的节点的计数变量;ni表示第i层全连接层的节点个数;w
ij
表示第i层全连接层的第j个节点的权重系数;b
ij
表示第i层全连接层的第j个节点的偏置值;d表示全连接层的层数;
[0076]
所述的步骤b6,采用步骤b1-b5求得的运动轨迹模型获取异常分数score,并将异常分数score与异常阈值θ对比,若异常分数score大于异常阈值θ,则输出为深度学习模型检测出的异常,否则,输出结果为正常;
[0077]
score=fc(concat(lstm1(∑oc1i),lstm2(∑oc2i),lstm3(∑oc3i)))
[0078]
其中,∑oc1i表示轨迹卷积层一维卷积的结果;∑oc2i表示距离卷积层一维卷积的结果;∑oc3i表示角度卷积层一维卷积的结果;lstm1(
·
)表示轨迹lstm层;lstm2(
·
)表示距离lstm层;lstm3(
·
)表示角度lstm层;concat(
·
)为合并函数;fc(
·
)表示全连接层的输出值。
[0079]
所述的步骤s4,采用轨迹偏离距离对当前运动轨迹进行异常检测,包括如下步骤:
[0080]
c1.获取赛道的起点和终点位置,同时将比赛场地近似看作一个平面,计算每一时刻偏离起点和终点所在直线的距离;
[0081]
c2.提取出偏离起点和终点所在直线最远的若干个点,生成最远的点的集合;
[0082]
c3.获取关键点,关键点包括起点、终点和步骤c2得到的偏离起点和终点所在直线最远的若干个点;
[0083]
c4.在赛道上选取若干个标记点,利用关键点和标记点数据,计算关键点与赛道之间的距离;
[0084]
c5.判断运动员是否偏离赛道;若任意关键点与赛道轨迹上各标记点的最短距离超过偏离阈值,则认为运动员偏移赛道,否则认为运动员没有偏离赛道。
[0085]
所述的步骤c1,包括计算每一时刻t偏离起点和终点所在直线的距离d
t
:
[0086][0087]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;a表示起讫点之间的纬度差值,b表示起讫点之间的经度差值,a=y
1-y0,b=x
1-x0;x0表示运动员的起点的经度;y0表示运动员的起点的纬度;x1表示运动员的起点的经度;y1表示运动员的起点的纬度;
[0088]
所述的步骤c2,包括最远的点的集合q:q={(x
t
,y
t
)|d
t
>ε},其中,ε表示最远距离阈值,最远的点的集合q的元素个数为n;x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;
[0089]
所述的步骤c3,包括得到的n个最远的点与运动员的起点、终点合并得到n 2个关键点
[0090]
所述的步骤c4,包括计算关键点与赛道之间的距离
[0091][0092]
其中,表示关键点的经度;表示关键点的纬度;表示赛道轨迹中各个点的经度;表示赛道轨迹中各个点的纬度;n为关键点的个数;m为赛道轨迹上选取的标记点的个数;r表示地球半径;求得每个关键点与各个标记点的最短距离
[0093]
所述的步骤c5,包括判断运动员是否偏离赛道距离过远,若任意关键点与赛道轨迹上各标记点的最短距离超过偏离阈值则认为运动员偏移赛道距离过远,否则认为运动员没有偏离赛道。
[0094]
本发明提供的这种长跑运动轨迹异常检测方法,利用设定规则和深度学习,解决了设备出现自身定位故障导致的漂移或静止数据等情况下,仅考虑轨迹相似度,难以对运动员异常状况做出正确决策的问题;对运动员的异常检测更准确高效,能够及时对运动员进行异常检测并实施救援,保证了比赛时的安全性。
附图说明
[0095]
图1为本发明方法的流程示意图。
[0096]
图2为本发明实施例的运动轨迹模型的训练过程示意图。
[0097]
图3为本发明实施例的运动员各个时刻运动方向的示意图。
[0098]
图4为本发明实施例的运动轨迹模型的检测运动员轨迹异常的结构示意图。
具体实施方式
[0099]
如图1为本发明方法的流程示意图:本发明提供的这种长跑运动轨迹异常检测方法,包括如下步骤:
[0100]
s1.获取历史运动轨迹;
[0101]
s2.通过历史运动轨迹建立运动轨迹模型;
[0102]
s3.通过定位设备获取当前运动轨迹;
[0103]
s4.采用静止时间对当前运动轨迹进行异常检测,并获取时间异常;采用轨迹偏离距离对当前运动轨迹进行异常检测,并获取距离异常;采用运动轨迹模型对当前运动轨迹进行异常检测,并获取轨迹异常;
[0104]
s5.定位设备将做出反应,当输出的预测结果显示运动轨迹状态异常时,设备将根据异常类型提示救援人员。
[0105]
所述的步骤s2,包括如下步骤:
[0106]
a1.对历史轨迹数据进行切片,设置滑动窗口大小为window_size,滑动窗口步长为window_length,并根据运动员求救数据对每一个轨迹切片加上对应的异常标签labeln,然后根据得到的轨迹切片和对应的异常标签进行后续训练运动轨迹模型,运动轨迹模型为一个深度学习模型。
[0107]
a2.根据运动员每一时刻的运动方向与水平线正方向形成的夹角,计算运动员的行进角度;将比赛场地近似看作一个平面,计算运动员从t时刻到t 1时刻的行进角度b
t
:
[0108][0109]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;x
t 1
表示运动员在t 1时刻位置的经度;y
t 1
表示运动员在t 1时刻的纬度。
[0110]
如图2为本发明实施例的运动轨迹模型的训练过程示意图。b3.采用卷积神经网络(cnn)求解运动轨迹模型,包括如下步骤:
[0111]
b1.通过步骤a2计算运动员从t时刻到t 1时刻的行进角度b
t
,并求解运动员从t时刻到t 1时刻的行进距离e
t
得到:
[0112][0113]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;运动员轨迹坐标序列表示为h,h=(x1,y1,x2,y2,x3,y3,...,x
l
,y
l
),l表示运动员坐标序列长度,r表示地球半径;
[0114]
设运动员的行进距离系列e和行进角度序列b分别为:e=(e1,e2,e3,...,e
l-1
),b=(b1,b2,b3,...,b
l-1
);
[0115]
由于定位设备采集运动员轨迹数据的时间间隔不相等,可以对运动员轨迹坐标序列h、运动员的行进距离系列e和行进角度序列b进行插值,包括:
[0116][0117][0118][0119][0120]
其中,表示插值后得到的运动员轨迹坐标,表示插值后得到的运动员
轨迹经度,表示插值后得到的运动员轨迹纬度;m
t
表示插值后得到的运动员行进距离;α
t
表示插值后得到的运动员行进角度;ω表示时刻对应的权重系数:tk表示原始序列中第k个点对应的时间;t
k 1
表示原始序列中第k 1个点对应的时间;
[0121]
如图3为本发明实施例的运动员各个时刻运动方向的示意图。插值后可以得到插值后的运动员轨迹坐标序列p(即所有点进行插值后得到的点的集合)、插值后的运动员行进距离序列m和插值后的运动员行进角度序列a,分别表示为:
[0122][0123]
m=(m1,m2,m3,...,m
l-1
)
[0124]
a=(α1,α2,α3,...,α
l-1
)
[0125]
其中,l表示运动员在长跑过程中的最后时刻;采用min-max标准化方法,对插值后的运动员轨迹坐标序列p、插值后的运动员行进距离序列m和插值后的运动员行进角度序列a分别进行归一化:
[0126][0127][0128][0129][0130]
其中,表示插值后得到的运动员轨迹经度,表示插值后得到的运动员轨迹纬度;表示归一化后得到的运动员轨迹经度;表示归一化后得到的运动员轨迹纬度;表示归一化后得到的运动员行进距离;表示归一化后得到的运动员行进角度;m
t
表示插值后得到的运动员行进距离;α
t
表示插值后得到的运动员行进角度;表示插值后得到的运动员轨迹经度的最小值;表示插值后得到的运动员轨迹经度的最大值;表示插值后得到的运动员轨迹纬度的最小值;表示插值后得到的运动员轨迹纬度的最大值;min(m
t
)表示插值后得到的运动员行进距离的最小值;max(m
t
)表示插值后得到的运动员行进距离的最大值;min(α
t
)表示插值后得到的运动员行进角度的最小值;max(α
t
)表示插值后得到的运动员行进角度的最大值;求得归一化后的运动员轨迹坐
标序列p
*
,归一化后的运动员行进距离序列m
*
和归一化后的运动员行进角度序列a
*
:
[0131][0132][0133][0134]
其中,t表示运动员在长跑过程中的某一时刻;l表示运动员在长跑过程中的最后时刻;表示归一化后的运动员在最后时刻的坐标;表示归一化后的运动员在最后时刻的行进距离;表示归一化后的运动员在最后时刻的行进角度;并将处理后的数据存储到mysql数据库。
[0135]
b2.进行特征提取并输出时序数据;将步骤b1获取的归一化后的运动员轨迹坐标序列p
*
,归一化后的运动员行进距离序列m
*
和归一化后的运动员行进角度序列a
*
分别输入到3个卷积层中,并计算相应的实际输出,时序数据包括轨迹卷积层oc
1,i
、距离卷积层oc
2,i
和角度卷积层oc
3,i
:
[0136][0137][0138][0139]
其中,oc
1,i
表示轨迹卷积层输出的一维序列的第i位数据;oc
2,i
表示距离卷积层的一维序列的第i位数据;oc
3,i
表示交底卷积层的一维序列的第i位数据;j表示卷积核的个数;hj表示卷积核;p
i j-1
表示输入的归一化后的运动员轨迹的经纬度坐标序列值;m
i j-1
表示输入的归一化后的运动员的行进距离序列值;a
i j-1
表示输入的归一化后的运动员的行进角度序列值。
[0140]
b3.采用lstm层处理时序数据;lstm层为长短期记忆人工神经网络层,包括:
[0141]it
=σ(w
il
l
t
w
irst-1
w
icct-1
bi)
[0142]ft
=σ(w
fl
l
t
w
frst-1
w
fcct-1
bf)
[0143]gt
=σ(w
cl
l
t
w
crst-1
bc)
[0144]ct
=f
t
⊙ct-1
g
t
⊙it
[0145]ot
=σ(w
ol
l
t
w
orst-1
w
occt-1
bo)
[0146]mt
=o
t
⊙
h(c
t
)
[0147]st
=w
smmt
[0148]
其中,l为lstm层的输入值;s为lstm层的输出值;c为记忆单元;h(c
t
)为记忆单元的细胞状态;f
t
为遗忘门;g
t
为记忆门;i
t
表示输入门;o
t
为输出门w
fl
表示输入门接受的t时刻的输入的权重;w
fr
表示输入门接受的t-1时刻的lstm层的输出值的权重;w
fc
分别表示输
入门接受的t-1时刻所有细胞的输入的权重;w
cl
表示遗忘门接受的输入门接受的t时刻的输入的权重;w
cr
表示遗忘门接受的t-1时刻的lstm层的输出值的权重,w
ol
表示输出值接受的t时刻的输入的权重;w
or
表示输出门接受的t-1时刻的lstm层的输出值的权重;w
oc
表示输出门接受的t-1时刻所有细胞的输入的权重,w
sm
表示记忆单元接受的两个输入的权重,b为偏置,
⊙
表示点乘。w
il
表示输入门接受的t时刻的输入权重;l
t
表示输入门接受的t时刻的输入;w
ir
表示前t-1个时刻的lstm层的输出权重;s
t-1
表示t-1时刻的lstm层的输出值;w
ic
表示输入门接受的t-1时刻所有细胞的输入权重;c
t
表示t时刻的记忆单元;c
t-1
表示输入门接受的t-1时刻所有细胞的输入;bi表示输入门的偏差;bf表示遗忘门的偏差;bc表示记忆单元的偏差;o
t
表示t时刻的输出;bo表示输出门的偏差;m
t1
表示输出到lstm的t时刻输出值的细胞状态;s
t
表示t时刻lstm的输出值;w
sm
表示记忆单元细胞状态的权重;
[0149]
将轨迹卷积层、距离卷积层和角度卷积层输出的数据分别输入到3个lstm层中,包括轨迹lstm层lstm1(
·
)、距离lstm层lstm2(
·
)和角度lstm层lstm3(
·
);
[0150]
lstm1(
·
)=lstm(i1,h1,n1)
[0151]
lstm2(
·
)=lstm(i2,h2,n2)
[0152]
lstm3(
·
)=lstm(i3,h3,n3)
[0153]
其中,i1表示轨迹lstm层的输入大小;i2表示距离lstm层的输入大小;i3表示角度lstm层的输入大小;h1表示轨迹lstm层中隐藏层的单元数;h2表示距离lstm层中隐藏层的单元数;h3表示角度lstm层中隐藏层的单元数;n1表示轨迹lstm层的层数;n2表示距离lstm层的层数;n3表示角度lstm层的层数。
[0154]
b4.将第一lstm层、第二lstm层和第三lstm层的输出值进行合并,得到:c=concat(layer1,layer2,layer3,...,layerr)
[0155]
其中,c为合并后的输出值;concat(
·
)为合并函数,layerr表示第r个待合并的层。
[0156]
b5.将合并后得到的值作为输入值输入到全连接层,全连接层的每一个结点都与上一层的所有结点相连接,可以把提取到的特征综合起来;在前向计算过程时,通过线性加权求和,得到全连接层的输出值fc(c):
[0157][0158]
fc(c)=cd[0159]
其中,ci表示第i层全连接层的输入值,其中c0=c,i表示隐藏层的节点的计数变量;ni表示第i层全连接层的节点个数;w
ij
表示第i层全连接层的第j个节点的权重系数;b
ij
表示第i层全连接层的第j个节点的偏置值;d表示全连接层的层数;
[0160]
如图4为本发明实施例的运动轨迹模型的检测运动员轨迹异常的结构示意图。b6.采用步骤b1-b5求得的运动轨迹模型获取异常分数score,并将异常分数score与异常阈值θ对比,若异常分数score大于异常阈值θ,则输出为深度学习模型检测出的异常,否则,输出结果为正常;
[0161]
score=fc(concat(lstm1(∑oc1i),lstm2(∑oc2i),lstm3(∑oc3i)))
[0162]
其中,∑oc1i表示轨迹卷积层一维卷积的结果;∑oc2i表示距离卷积层一维卷积的
结果;∑oc3i表示角度卷积层一维卷积的结果;lstm1(
·
)表示轨迹lstm层;lstm2(
·
)表示距离lstm层;lstm3(
·
)表示角度lstm层;concat(
·
)为合并函数;fc(
·
)表示全连接层的输出值。
[0163]
所述的步骤s4,采用静止时间对当前运动轨迹进行异常检测,包括设置静止时间阈值,对当前运动轨迹的静止时间进行检测,若超出静止时间阈值范围,则作为时间异常。
[0164]
所述的步骤s4,采用轨迹偏离距离对当前运动轨迹进行异常检测,包括对当前运动轨迹与赛道之间的距离进行检测,若超出距离阈值,则作为距离异常;所述的步骤s4包括如下步骤:
[0165]
c1.获取赛道的起点和终点位置,同时将比赛场地近似看作一个平面,计算每一时刻t偏离起点和终点所在直线的距离d
t
:
[0166][0167]
其中,x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;a表示起讫点之间的纬度差值,b表示起讫点之间的经度差值,a=y
1-y0,b=x
1-x0;x0表示运动员的起点的经度;y0表示运动员的起点的纬度;x1表示运动员的起点的经度;y1表示运动员的起点的纬度;
[0168]
c2.提取出偏离起点和终点所在直线最远的n个点,所述的步骤c2,包括最远的点的集合q:q={(x
t
,y
t
)|d
t
>ε},其中,ε表示最远距离阈值,最远的点的集合q的元素个数为n;x
t
表示运动员在t时刻位置的经度;y
t
表示运动员在t时刻位置的纬度;
[0169]
c3.获取关键点,关键点包括起点、终点和步骤a2得到的偏离起点和终点所在直线最远的n个点,关键点的数量为n 2;
[0170]
c4.在赛道上选取m个标记点,利用关键点和标记点数据,计算关键点与赛道之间的距离
[0171][0172]
其中,表示关键点的经度;表示关键点的纬度;表示赛道轨迹中各个点的经度;表示赛道轨迹中各个点的纬度;n为关键点的个数;m为赛道轨迹上选取的标记点的个数;r表示地球半径;求得每个关键点与各个标记点的最短距离
[0173]
c5.判断运动员是否偏离赛道,若任意关键点与赛道轨迹上各标记点的最短距离超过偏离阈值则认为运动员偏移赛道,否则认为运动员没有偏离赛道。
[0174]
所述的步骤s5包括,gps定位设备将根据步骤s2-s4输出的异常预测结果作出反应,当输出的预测结果显示运动员状态异常时,设备将根据异常类型返回三种消息通知,包括静止时间过长,偏离赛道以及用深度学习模型检测出的异常,以提示救援人员。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
