1.本公开涉及控制系统、作业车辆的控制方法以及作业车辆。
背景技术:
2.例如,在美国专利申请公报第2008/0208461号说明书(专利文献1)中公开了具备自动转向系统的机动平地机。自动转向系统具有:路径生成装置,其基于车辆的位置数据、作业现场的地图、或者表示车辆的移动条件的参数等,生成车辆的移动路径;以及路径追踪装置,其沿着由路径成形装置生成的路径对车辆进行引导。
3.在先技术文献
4.专利文献
5.专利文献1:美国专利申请公报第2008/0208461号说明书
技术实现要素:
6.发明要解决的课题
7.在专利文献1所公开的机动平地机中,通过自动转向系统来减轻操作转向的操作员的负担。然而,操作员必须预先向路径生成装置输入车辆的移动路径的生成所必需的各种信息,因此无法说操作员的负担被充分减轻。
8.为此,本公开的目的在于,提供一种实现充分减轻操作员的负担的驾驶辅助系统的控制系统、作业车辆的控制方法以及作业车辆。
9.用于解决课题的手段
10.根据本公开的控制系统是对作业车辆的转向机构进行控制的控制系统。控制系统具备控制部。控制部以作业车辆的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制作业车辆的转向机构。
11.根据本公开的作业车辆的控制方法是控制包括转向机构的作业车辆的方法。作业车辆的控制方法包括如下步骤:计算作业车辆的每单位行驶距离的行进方向的变化率;以所计算出的作业车辆的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构。
12.根据本公开的作业车辆具备转向机构、以及控制部。控制部以作业车辆的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构。
13.发明效果
14.根据本公开,能够提供一种实现充分减轻操作员的负担的驾驶辅助系统的控制系统、作业车辆的控制方法以及作业车辆。
附图说明
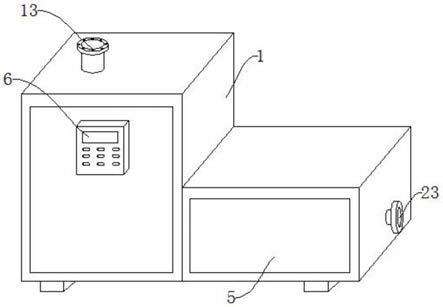
15.图1是示出机动平地机的立体图。
16.图2是示出图1中的机动平地机的侧视图。
17.图3是示出与图1中的机动平地机的转向有关的结构的系统图。
18.图4是示出与图1中的机动平地机的驾驶辅助系统有关的结构的框图。
19.图5是示意性地示出在回转时开始转向自动控制的机动平地机的俯视图。
20.图6是示意性地示出在直行时开始转向自动控制的机动平地机的俯视图。
21.图7是示出在推土铲中接受有负载的情况下的机动平地机的举动的俯视图。
22.图8是示出转向盘操作与转向自动控制的相互的时机的关系的时序图。
23.图9是示出机动平地机的控制方法的流程图。
24.图10是示出与图4中的驾驶辅助系统有关的结构的变形例的框图。
25.图11是示出机动平地机的转向机构的控制系统的概念的图。
26.图12是示出推土机的立体图。
27.图13是示出与图12中的推土机的转向有关的结构的系统图。
28.图14是示出与图12中的推土机的驾驶辅助系统有关的结构的框图。
具体实施方式
29.参照附图对本公开的实施方式进行说明。需要说明的是,在以下所参照的附图中,对于相同或者相当于其的构件标注有相同的编号。
30.(实施方式1)
31.图1是示出机动平地机的立体图。图2是示出图1中的机动平地机的侧视图。
32.如图1以及图2所示,机动平地机100是一边行驶、一边进行整地作业或进行除雪作业的作业机械。机动平地机100具有前车架14、后车架15、一对铰接缸28、设置有驾驶座的驾驶室11、发动机室13、前轮16及后轮17、以及工作装置12。
33.在以下的说明中,前后方向是就座于驾驶室11内的驾驶座的操作员的前后方向。就座于驾驶座的操作员的正面方向是前方,就座于驾驶座的操作员的背后方向是后方。左右方向是就座于驾驶座的操作员的左右方向。就座于驾驶座的操作员朝向正面时的右侧是右方,就座于驾驶座的操作员朝向正面时的左侧是左方。上下方向是与包含前后方向以及左右方向的平面正交的方向。地面所在的一侧是下方,天空所在的一侧是上方。
34.前车架14以及后车架15构成机动平地机100的车身框架18。前车架14设置于后车架15的前方。
35.前车架14以能够以转动中心121为中心转动的方式连结于后车架15。前车架14通过设置于转动中心121的轴上的中心销(未图示)而以能够转动的方式连结于后车架15。转动中心121是沿上下方向延伸的轴。转动中心121位于左右方向上的机动平地机100的中央。
36.前车架14从转动中心121朝向前方延伸。前车架14具有以能够转动的方式连结于后车架15的基端部14p、以及设置于与基端部14p相反一侧的前端部14q。后车架15从转动中心121朝向后方延伸。
37.一对铰接缸28夹着前车架14设置于左右两侧。铰接缸28是利用液压来伸缩驱动的液压缸。铰接缸28在伸缩方向上的一端以能够转动的方式连结于前车架14,在伸缩方向上的另一端以能够转动的方式连结于后车架15。通过铰接缸28的伸缩驱动,前车架14相对于后车架15以转动中心121为中心转动。
38.驾驶室11载置于后车架15。驾驶室11形成用于供操作员搭乘的空间。在驾驶室11
中,除了驾驶座之外,还设置有用于转向操作的转向盘41及转向杆42(参照下面的图3),用于操作工作装置12的多个杆、以及各种显示装置等。需要说明的是,驾驶室11也可以载置于前车架14。
39.发动机室13设置于驾驶室11的后方。发动机室13由后车架15支承。在发动机室13中收纳有发动机。
40.前轮16以及后轮17是行驶轮。前轮16以能够旋转的方式安装于前车架14。前轮16以相对于前车架14能够转向的方式安装于前车架14。前轮16以相对于前后方向所成的角度变化的方式向左右进行动作。前轮16是转向轮。后轮17以能够旋转的方式安装于后车架15。向后轮17传递来自发动机的驱动力。需要说明的是,在图1中,示出了由单侧各一个轮的两个前轮16、以及单侧各两个轮的四个后轮17构成的总共六个轮的行驶轮,前轮以及后轮的数量以及配置并不局限于此。
41.工作装置12在前后方向上设置于前轮16与后轮17之间。工作装置12由前车架14支承。工作装置12具有推土铲21、牵引杆22、回转环23、以及一对提升缸25。
42.牵引杆22设置于前车架14的下方。牵引杆22的前端部以能够摆动的方式连结于前车架14的前端部14q。一对提升缸25夹着前车架14设置于左右两侧。牵引杆22的后端部经由一对提升缸25由前车架14支承。
43.通过一对提升缸25的伸缩,牵引杆22的后端部能够相对于前车架14上下升降。通过一对提升缸25一起进行缩短驱动,推土铲21相对于前车架14以及前轮16的高度被向上方调整。通过一对提升缸25一起进行伸长驱动,推土铲21相对于前车架14以及前轮16的高度被向下方调整。
44.牵引杆22通过一对提升缸25彼此不同的伸缩而能够以沿着前后方向的轴为中心上下摆动。
45.回转环23设置于牵引杆22的下方。回转环23以能够回转的方式连结于牵引杆22。回转环23能够以沿着上下方向的轴为中心向顺时针方向或逆时针方向回转。
46.推土铲21设置于回转环23的下方。推土铲21与地面对置地设置。推土铲21由回转环23支承。推土铲21伴随回转环23的回转运动,以俯视下推土铲21相对于前后方向所成的角度(推土铲推进角)变化的方式回转。推土铲21的回转轴是沿着上下方向延伸的轴。
47.图3是示出与图1中的机动平地机的转向有关的结构的系统图。如图3所示,机动平地机100还具有转向机构66、控制部51、以及操作部67。
48.转向机构66是操作机动平地机100的行进方向的机构。控制部51对机动平地机100的转向进行控制。控制部51对转向机构66的动作进行控制。操作部67设置于驾驶室11内。操作部67为了使转向机构66进行动作而由操作员操作。
49.操作部67具有转向盘41、以及转向杆42。转向盘41设置于驾驶室11内的驾驶座的前方。转向盘41例如是轮形状的方向盘,由操作员进行旋转操作。转向杆42设置于与转向盘41分离的位置。转向杆42例如设置于驾驶室11内的驾驶座的侧方。转向杆42由操作员进行倾倒操作。
50.机动平地机100还具有电流体压力控制阀73。操作部67还具有轨道阀71。转向机构66具有转向阀72、以及转向缸36。
51.电流体压力控制阀73向转向阀72供给压力油。控制部51基于来自转向杆42的操作
信号,对电流体压力控制阀73进行控制。轨道阀71对应于转向盘41的旋转操作来向转向阀72供给压力油。
52.转向阀72向转向缸36供给压力油。转向阀72被从电流体压力控制阀73以及轨道阀71供给的压力油控制。转向缸36通过来自转向阀72的压力油,以前轮16相对于前后方向所成的角度变化的方式使前轮16向左右进行动作。在前轮16倾向左侧时,机动平地机100朝向左前方以描绘圆弧的方式回转。在前轮16倾向右侧时,机动平地机100朝向右前方以描绘圆弧的方式回转。
53.根据上述那样的结构,通过操作员操作转向盘41或者转向杆42,从而转向缸36伸缩,前轮16向左右进行动作。
54.图4是示出与图1中的机动平地机的驾驶辅助系统有关的结构的框图。如图2至图4所示,控制部51对以下说明的机动平地机100的驾驶辅助系统的动作进行控制。
55.机动平地机100还具有转向盘传感器31、以及转向杆传感器32。转向盘传感器31检知转向盘41的操作。转向杆传感器32检知转向杆42的操作。
56.转向盘传感器31在检知到由操作员进行的转向盘41的操作的情况下产生操作信号,并将操作信号向控制部51输出。转向盘传感器31例如是检测通过转向盘41的旋转而产生的转向盘轴的角度变位的轴变位传感器。转向杆传感器32在检知到由操作员进行的转向杆42的操作的情况下产生操作信号,并将操作信号向控制部51输出。转向杆传感器32例如是检测转向杆42的角度位置的位置传感器。
57.需要说明的是,转向盘传感器31也可以具有不灵敏区,以使得在转向盘41的旋转操作量微小的情况下,不产生操作信号。同样地,转向杆传感器32也可以具有不灵敏区,以使得在转向杆42的倾倒操作量微小的情况下,不产生操作信号。作为一例,后述的前轮16的转向角度在
±
0.5
°
以内变化时的转向盘41或者转向杆42的操作量被判断为微小。
58.机动平地机100具有检知部63。检知部63检知与机动平地机100的位置和朝向中的至少任一方相关的信息。
59.检知部63具有惯性计测装置(imu:inertial measurement unit)38。imu38是计测机动平地机100的加速度以及角速度的传感器。imu38将机动平地机100的加速度以及角速度的信号向控制部51输出。
60.如图4所示,控制部51在被输入了用于开始转向机构66的自动控制的触发的情况下,以机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66。
61.控制部51在停止了操作部67的操作的情况下开始控制转向机构66。控制部51在再次开始了操作部67的操作的情况下停止转向机构66的控制。
62.控制部51具有触发输出部52、自动控制指令部58、以及转向控制部54。
63.触发输出部52基于来自转向盘传感器31的转向盘41的操作信号、以及/或者来自转向杆传感器32的转向杆42的操作信号,输出用于开始或停止转向机构66的控制(后述的转向自动控制)的触发。
64.触发输出部52在被输入了来自转向盘传感器31的转向盘41的操作信号、或者来自转向杆传感器32的转向杆42的操作信号的情况下,输出用于停止转向自动控制的触发(后述的停止触发)。
65.触发输出部52在未被输入来自转向盘传感器31的转向盘41的操作信号、以及来自转向杆传感器32的转向杆42的操作信号的情况下,输出用于开始转向自动控制的触发(后述的开始触发)。
66.自动控制指令部58具有位置及方向计算部59、以及行进方向的变化率计算部57。
67.向位置及方向计算部59输入由imu38检知到的机动平地机100的加速度以及角速度的信号。位置及方向计算部59基于由imu38计测出的机动平地机100的加速度以及角速度,计算机动平地机100的位置以及朝向,并将计算出的机动平地机100的位置以及朝向的信号向变化率计算部57输出。
68.向变化率计算部57输入由位置及方向计算部59计算出的机动平地机100的位置以及朝向的信号。变化率计算部57基于由位置及方向计算部59计算出的机动平地机100的位置以及朝向,计算机动平地机100的每单位行驶距离的行进方向的变化率。
69.转向控制部54以由变化率计算部57计算出的机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66。具体地说,转向控制部54以由变化率计算部57计算出的机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式向电流体压力控制阀73输出控制信号。电流体压力控制阀73基于来自转向控制部54的信号,向转向阀72供给压力油,从而对转向缸36进行控制(转向自动控制的开始)。
70.在再次开始由操作员进行的操作部67的操作时,向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号、或者来自转向杆传感器32的转向杆42的操作信号。由此,触发输出部52输出停止触发。在该情况下,自动控制指令部58接收来自触发输出部52的停止触发,使转向自动控制停止。
71.接着,对由控制部51执行的转向自动控制进行更具体说明。图5是示意性地示出在回转时开始转向自动控制的机动平地机的俯视图。
72.需要说明的是,为了便于说明,在图5以及后面的图6中,示出了作为用于使前轮16动作的操作部67而仅使用转向盘41的情况。
73.如图4以及图5所示,机动平地机100以依次向机动平地机100a、机动平地机100b、机动平地机100c以及机动平地机100d所表示的位置(以下,分别称为“位置100a”、“位置100b”、“位置100c”以及“位置100d”)移动的方式行驶。
74.在机动平地机100从位置100a移动至位置100b的期间,操作员操作转向盘41而使机动平地机100行驶。在此期间,向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号。触发输出部52输出停止触发。自动控制指令部58接收来自触发输出部52的停止触发,不开始转向自动控制。
75.在机动平地机100从位置100b移动至位置100c的期间,操作员操作转向盘41而使机动平地机100朝向右前方回转。在此期间,向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号。触发输出部52输出停止触发。自动控制指令部58接收来自触发输出部52的停止触发,不开始转向自动控制。
76.在机动平地机100从位置100c移动至位置100d的期间,操作员不操作转向盘41。在此期间,不向触发输出部52输入来自来自转向盘传感器31的转向盘41的操作信号。触发输出部52输出开始触发。自动控制指令部58接收来自触发输出部52的开始触发,开始转向自动控制。
77.在没有向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号的情况下,触发输出部52输出开始触发。位置及方向计算部59基于由imu38计测出的机动平地机100的加速度以及角速度,计算机动平地机100的位置以及朝向,并将计算结果向变化率计算部57输出。变化率计算部57基于由位置及方向计算部59计算出的机动平地机100的位置以及朝向,计算机动平地机100的每单位行驶距离的行进方向的变化率。机动平地机100的每单位行驶距离的行进方向的变化率是指机动平地机100每行驶单位行驶距离(例如,1m)的机动平地机100的朝向(例如,对应于机动平地机100的前方的方向)的变化量(角度)。
78.在执行从位置100c至位置100d为止的转向自动控制的期间,转向控制部54以机动平地机100每行驶单位行驶距离的机动平地机100的朝向的变化量成为恒定的角度的方式来控制转向缸36。机动平地机100通过由转向控制部54进行的转向自动控制,在维持恒定的曲率半径r的同时进行回转移动。
79.之后,转向控制部54在向触发输出部52输入了来自转向盘传感器31的转向盘41的操作信号的情况下,停止转向自动控制,且在没有向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号的情况下,再次开始转向自动控制。
80.图6是示意性地示出在直行时开始转向自动控制的机动平地机的俯视图。
81.如图6所示,机动平地机100以依次向机动平地机100s、机动平地机100t以及机动平地机100u所表示的位置(以下,分别称为“位置100s”、“位置100t”以及“位置100u”)移动的方式行驶。
82.在机动平地机100从位置100s移动至位置100t的期间,操作员操作转向盘41来使机动平地机100行驶。在此期间,向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号。触发输出部52输出停止触发。自动控制指令部58接收来自触发输出部52的停止触发,不开始转向自动控制。
83.在机动平地机100从位置100t移动至位置100u的期间,操作员不操作转向盘41。在此期间,不向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号。触发输出部52输出开始触发。自动控制指令部58接收来自触发输出部52的开始触发,开始转向自动控制。
84.在执行从位置100t至位置100u为止的转向自动控制的期间,转向控制部54以机动平地机100每行驶单位行驶距离的机动平地机100的朝向的变化量成为零的方式来控制转向缸36。机动平地机100通过由转向控制部54进行的转向自动控制,沿一条直线移动。
85.图7是示出在推土铲中接受有负载的情况下的机动平地机的举动的俯视图。如图7所示,在机动平地机100的侧方堆积有砂土或者雪等堆积物160,推土铲21以相对于左右方向倾斜的方式被使用。在该情况下,由于推土铲21从堆积物160接受负载=而机动平地机100的行进方向向侧方偏移,或者由于来自堆积物160的负载发生变化而机动平地机100的行进方向左右晃动。另外,不局限于机动平地机100,作业车辆通常在具有凹凸形状的地面上行驶,因此作业车辆的行进方向容易偏移。
86.因此,操作员为了调整机动平地机100的行进方向,必须在操作转向盘41或转向杆42、或者在进行倾斜操作的同时,也操作工作装置12的操作杆。上述那样的作业需要高超的技术和集中力,因此给操作员带来过度的负担。
87.针对于此,在机动平地机100中,在向自动控制指令部58输入了用于开始转向自动
控制的触发的情况下,转向控制部54以机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式进行转向自动控制。
88.根据上述那样的结构,操作员在执行转向自动控制的期间,无需进行用于调整机动平地机100的行进方向的操作,从而能够集中于工作装置12的操作。另外,转向自动控制通过机动平地机100的每单位行驶距离的行进方向的变化率的计算而自动地执行,因此操作员无需预先输入作业现场的地图,或输入与行驶路径有关的各种参数。因此,能够实现充分减轻操作员的负担的驾驶辅助系统。
89.另外,控制部51在停止了转向盘41以及转向杆42的操作的情况下,开始转向自动控制。根据上述那样的结构,操作员无需为了开始转向自动控制而进行特别的操作,因此能够进一步减轻操作员的负担。
90.并且,控制部51在再次开始了转向盘41或者转向杆42的操作的情况下,停止转向自动控制。根据上述那样的结构,操作员通过转向盘41或者转向杆42的操作,能够使机动平地机100向意图的方向行驶。
91.图8是示出转向盘操作与转向自动控制的相互的时机的关系的时序图。
92.如图4以及图8所示,控制部51也可以在停止了转向盘41以及转向杆42的操作的状态持续了规定期间后,开始转向自动控制。
93.在图8所示的时序图中,在时间t1,操作员不操作转向盘41,从而不向触发输出部52输入来自转向盘传感器31的转向盘41的操作信号。接下来,在时间t2,转向控制部54开始转向自动控制。
94.时间t1至时间t2的长度例如为1s以上且2s以下的范围(1s≤(t2-t1)≤2s)。
95.根据上述那样的结构,由于在停止了转向盘41以及转向杆42的操作的状态持续了规定期间后开始转向自动控制,因此能够防止控制部51对转向盘41以及转向杆42的操作的停止过度反应而开始转向自动控制。
96.图9是示出机动平地机的控制方法的流程图。如图4以及图9所示,首先,控制部51设定为驾驶辅助模式(s201)。驾驶辅助模式的设定例如通过由操作员将设置于驾驶室11内的模式设定开关打开来进行。
97.接下来,转向盘传感器31检知有无由操作员进行的转向盘41的操作,转向杆传感器32检知有无由操作员进行的转向杆42的操作(s202)。
98.在本步骤中,在转向盘传感器31检知到转向盘41的操作的情况下,向触发输出部52输入转向盘41的操作信号,在转向盘传感器31没有检知到转向盘41的操作的情况下,不向触发输出部52输入转向盘41的操作信号。在转向杆传感器32检知到转向杆42的操作的情况下,向触发输出部52输入转向杆42的操作信号,在转向杆传感器32没有检知到转向杆42的操作的情况下,不向触发输出部52输入转向杆42的操作信号。
99.接下来,自动控制指令部58判断是否开始转向自动控制(s203)。
100.在s202的步骤中,在向触发输出部52输入了来自转向盘传感器31的转向盘41的操作信号、或来自转向杆传感器32的转向杆42的操作信号的情况下,触发输出部52向自动控制指令部58输出停止触发。在该情况下,自动控制指令部58判断为不开始转向自动控制。接下来,返回至s202的步骤。
101.在s202的步骤中,在没有向触发输出部52输入来自转向盘传感器31的转向盘41的
操作信号、以及来自转向杆传感器32的转向杆42的操作信号的情况下,触发输出部52向自动控制指令部58输出开始触发。在该情况下,自动控制指令部58判断为开始转向自动控制(s203)。接下来,前进至s204的步骤。
102.位置及方向计算部59基于由imu38计测出的机动平地机的加速度以及角速度,计算机动平地机的位置以及朝向。变化率计算部57基于由位置及方向计算部59计算出的机动平地机的位置以及朝向,计算机动平地机的每单位行驶距离的行进方向的变化率(s204)。转向控制部54以由变化率计算部57计算出的机动平地机的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向缸36(s205)。
103.在开始了s205的步骤后,继续执行转向盘传感器31检知有无由操作员进行的转向盘41的操作、且转向杆传感器32检知有无由操作员进行的转向杆42的操作的s206的步骤、以及自动控制指令部58判断是否停止转向自动控制的s207的步骤。在s207的步骤中,在判断为停止转向自动控制的情况下,转向控制部54停止转向自动控制(s208)。之后,返回至s202的步骤。
104.图10是示出与图4中的驾驶辅助系统有关的结构的变形例的框图。如图10所示,在本变形例中,机动平地机100具有切换开关37。切换开关37是用于切换转向自动控制的开始(打开)和转向自动控制的停止(关闭)的开关。
105.切换开关37设置于驾驶室11内。切换开关37的方式不受特别限定,例如可以是按压按钮,也可以是杆。切换开关37也可以设置于监视器中的触摸面板内。
106.在本变形例中,在由操作员对切换开关37进行打开操作时,向自动控制指令部58输入用于开始转向自动控制的触发(开始触发)。接着,执行机动平地机的每单位行驶距离的行进方向的变化率的计算、以及转向自动控制。在由操作员对切换开关37进行关闭操作时,向自动控制指令部58输入停止触发,停止转向自动控制。
107.根据上述那样的结构,操作员能够在自己更期望的时机开始转向自动控制。
108.对以上说明过的本实施方式中的机动平地机100及其控制方法的结构以及效果进行集中说明。
109.作为作业车辆的机动平地机100具备转向机构66、以及控制部51。控制部51以机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66。
110.根据上述那样的结构,由于控制部51以机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66,因此不要求操作员进行繁琐的作业。因此,能够实现充分减轻操作员的负担的驾驶辅助系统。
111.另外,控制部51在输入了用于开始控制转向机构66的触发的情况下,以机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66。
112.根据上述那样的结构,控制部51能够基于预先确定的触发,判断是否开始控制转向机构66。
113.另外,机动平地机100还具备操作部67。操作部67为了使转向机构66进行动作而被操作。控制部51在停止了操作部67的操作的情况下开始控制转向机构66。
114.根据上述那样的结构,由于不需要用于开始控制转向机构66的操作员的操作,因此能够进一步减轻操作员的负担。
115.另外,控制部51也可以在停止了操作部67的操作的状态持续了规定期间后,开始
控制转向机构66。
116.根据上述那样的结构,能够防止控制部51过度反应于操作部67的操作的停止而开始控制转向机构66。
117.另外,控制部51在再次开始了操作部67的操作的情况下停止转向机构66的控制。
118.根据上述那样的结构,在再次开始了操作部67的操作的情况下,通过该操作使转向机构66进行动作,由此操作员能够使机动平地机100向自己所期望的方向行驶。
119.另外,机动平地机100也可以具备作为用于切换由控制部51进行的转向机构66的控制的开始以及停止的开关的切换开关37。
120.根据上述那样的结构,操作员能够在自己更期望的时机开始由控制部51进行的转向机构66的控制。
121.另外,机动平地机100还具备检知部63。检知部63检知与机动平地机100的位置和朝向中的至少任一方有关的信息。控制部51基于与由检知部63检知到的机动平地机100的位置和朝向中的至少任一方有关的信息,确定机动平地机100的每单位行驶距离的行进方向的变化率。
122.根据上述那样的结构,控制部51能够使用与在检知部63中检知到的机动平地机100的位置和朝向中的至少任一方有关的信息,确定机动平地机100的行进方向的变化率。
123.机动平地机100的控制方法包括计算机动平地机100的每单位行驶距离的行进方向的变化率的步骤(s204)、以及以所计算出的机动平地机100的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66的步骤(s205)。
124.进行计算的步骤(s204)包括如下步骤:在输入了用于开始控制转向机构66的触发的情况下,计算机动平地机100的每单位行驶距离的行进方向的变化率。
125.根据上述那样的结构,能够实现充分减轻操作员的负担的驾驶辅助系统。
126.需要说明的是,作为本公开中的检知部,并不局限于上述的imu,也可以使用陀螺仪传感器、地磁传感器或者相机等。在作为本公开中的检知部而使用了相机的情况下,通过对由相机拍摄的机动平地机的周围的图像进行解析,能够检知机动平地机的位置以及朝向。
127.机动平地机100还具有使前轮16左右倾倒的倾斜机构、以及使前车架14与后车架15弯曲的铰接机构以作为操作机动平地机100的行进方向的转向机构66。由控制部51执行的转向机构66的控制并不局限于转向自动控制,可以是倾斜机构的自动控制,也可以是铰接机构的自动控制,还可以是转向机构、倾斜机构以及铰接机构中的多个机构的自动控制。
128.本公开中的作业车辆及其控制方法并不局限于机动平地机,例如也可以应用于轮式装载机、自卸车或者推土机等各种作业车辆。在应用于轮式装载机的情况下,控制部进行控制的对象也可以是以能够转动的方式连接的前车架与后车架的铰接角度。
129.图11是示出机动平地机的转向机构的控制系统的概念的图。在上述的实施方式中,对作为作业车辆的机动平地机100具备控制部51的情况进行了说明,但也可以如图3以及图11所示那样,是机动平地机的转向机构66由设置于与机动平地机分离的位置的控制部以及操作部控制的结构。
130.对机动平地机的转向机构66进行控制的控制系统具备以机动平地机的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制机动平地机的转向机构66的控制部
251。
131.(实施方式2)
132.在本实施方式中,对将在实施方式1中说明过的驾驶辅助系统应用于推土机的情况的结构进行说明。以下,对于与实施方式1中的结构重复的结构,不重复其说明。
133.图12是示出推土机的立体图。图13是示出与图12中的推土机的转向有关的结构的系统图。
134.如图12所示,推土机300具有车身311、工作装置313、以及左右一对牵引装置316(316r、316l)。车身311设置于左右一对牵引装置316(316r、316l)上。车身311具有驾驶室341、以及发动机室342。工作装置313设置于车身311的前方。工作装置313具有用于进行砂土的挖掘以及整地等作业的推土铲318。
135.左右一对牵引装置316(316r、316l)是用于使推土机300行驶的装置。左右一对牵引装置316(316r、316l)例如具有履带、以及终减速装置。通过驱动左右一对牵引装置316(316r、316l)旋转,从而推土机300行驶。
136.如图12以及图13所示,推土机300具有转向机构66、控制部51、操作部67、以及电流体压力控制阀73。
137.转向机构66具有驱动装置331。驱动装置331是利用液压进行工作的液压马达。驱动装置331能够使右侧的牵引装置(第一牵引装置)316r与左侧的牵引装置(第二牵引装置)316l相互独立地驱动。
138.操作部67具有转向杆42。电流体压力控制阀73向驱动装置331供给压力油。控制部51基于来自转向杆42的操作信号,对电流体压力控制阀73进行控制。驱动装置331利用来自电流体压力控制阀73的压力油,使右侧的牵引装置316r、以及左侧的牵引装置316l旋转。在右侧的牵引装置316r的旋转速度与左侧的牵引装置316l的旋转速度相同的情况下,推土机300直行。在右侧的牵引装置316r的旋转速度比左侧的牵引装置316l的旋转速度大的情况下,推土机300朝向左前方回转。在左侧的牵引装置316l的旋转速度比右侧的牵引装置316r的旋转速度大的情况下,推土机300朝向右前方回转。
139.图14是示出与图12中的推土机的驾驶辅助系统有关的结构的框图。如图13以及图14所示,推土机300具有转向杆传感器32。转向杆传感器32检知转向杆42的操作。
140.推土机300还具有检知部63。检知部63检知与推土机300的位置和朝向中的至少任一方有关的信息。检知部63具有imu38。imu38是计测推土机300的加速度以及角速度的传感器。imu38将推土机300的加速度以及角速度的信号向控制部51输出。
141.如图14所示,控制部51具有触发输出部52、自动控制指令部58、以及转向控制部54。
142.触发输出部52基于来自转向杆传感器32的转向杆42的操作信号,输出用于开始或停止转向机构66的控制的触发。
143.自动控制指令部58具有位置及方向计算部59、以及行进方向的变化率计算部57。
144.向位置及方向计算部59输入由imu38检知到的推土机300的加速度以及角速度的信号。位置及方向计算部59基于由imu38计测出的推土机300的加速度以及角速度,计算推土机300的位置以及朝向,并将所计算出的推土机300的位置以及朝向的信号向变化率计算部57输出。
145.向变化率计算部57输入由位置及方向计算部59计算出的推土机300的位置以及朝向的信号。变化率计算部57基于由位置及方向计算部59计算出的推土机300的位置以及朝向,计算推土机300的每单位行驶距离的行进方向的变化率。
146.转向控制部54以由变化率计算部57计算出的推土机300的每单位行驶距离的行进方向的变化率保持为恒定的方式来控制转向机构66。具体地说,转向控制部54以由变化率计算部57计算出的推土机300的每单位行驶距离的行进方向的变化率保持为恒定的方式向电流体压力控制阀73输出控制信号。电流体压力控制阀73基于来自转向控制部54的信号,向驱动装置331供给压力油,对右侧的牵引装置316r的旋转速度、以及左侧的牵引装置316l的旋转速度进行控制。
147.根据这样构成的推土机300,能够同样地起到在实施方式1中所记载的效果。
148.应当理解本次公开的实施方式在所有方面均为例示而不是限制性的。本发明的范围不由上述说明而是由技术方案来表示,且旨在包含与技术方案均等的含义及范围内的所有变更。
149.附图标记说明:
150.11、341...驾驶室;12、313...工作装置;13、342...发动机室;14...前车架;14p...基端部;14q...前端部;15...后车架;16...前轮;17...后轮;18...车身框架;21、318...推土铲;22...牵引杆;23...回转环;25...提升缸;28...铰接缸;31...转向盘传感器;32...转向杆传感器;36...转向缸;37...切换开关;41...转向盘;42...转向杆;51、251...控制部;52...触发输出部;54...转向控制部;57...变化率计算部;58...自动控制指令部;59...位置及方向计算部;63...检知部;66...转向机构;67...操作部;71...轨道阀;72...转向阀;73...电流体压力控制阀;100...机动平地机;121...转动中心;160...堆积物;300...推土机;311...车身;316、316l、316r...牵引装置;331...驱动装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。