:
1.本发明属于船舶流体装卸设备技术领域,特别涉及智能化流体装卸臂。
背景技术:
2.在进行码头油液装卸作业时,需要利用装卸臂实现船与岸的连接,在进行装卸作业前,常规装卸臂一般需要先手动打开装卸臂立柱底部的锁紧机构,再操作遥控器使装卸臂的三维接头靠近船舶介质出口法兰,接着登船靠近装卸臂法兰接口,拿下法兰盲板,最后操作装卸臂与船舶法兰对接,对接成功后,人工放下可调支腿至甲板面,可进行油液的转运输送。
3.现有技术下,普通的装卸臂无法实现与船舶法兰的无人化精准自动对接,容易造成油液装卸的工作效率低,存在安全隐患,并且容易产生油液泄漏。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供智能化流体装卸臂,解决了普通的装卸臂无法自动化精准与船舶法兰进行对接,容易造成油液装卸的工作效率低,并且容易产生油液泄漏等缺点。
5.为了解决上述问题,本发明提供了一种技术方案:
6.智能化流体装卸臂,包括装卸臂本体和装卸臂立柱,所述装卸臂本体通过装卸臂立柱连接于安装面上,所述装卸臂本体的端部安装有三维接头,所述装卸臂立柱的表面一侧安装有视觉识别装置,所述视觉识别装置包括两套工业相机。
7.优选的,所述装卸臂立柱的一侧安装有锁紧机构,所述锁紧机构包括油缸,所述油缸的输出端连接有短环链,所述短环链的上端连接有操纵杆,所述操纵杆的上方安装有锁紧销,锁紧机构可自动打开,装卸臂内外臂自由动作,装卸臂接口法兰可自动靠近船舶法兰进行对接。
8.优选的,所述三维接头的弯管上安装有卫星定位装置,可以实时对装卸臂法兰位置进行定位,方便自动化精准的进行快速对接。
9.优选的,所述三维接头上安装有盲板开合机构,所述盲板开合机构包括螺旋式摆动油缸,所述螺旋式摆动油缸的输出端安装有支架,所述支架远离螺旋式摆动油缸的一端固定连接有盲板,所述盲板的密封面上安装有减振垫,装卸臂法兰至船舶法兰附近后,视觉识别装置再次对船舶法兰进行精确定位并自动打开盲板,全程自动化操作。
10.优选的,所述三维接头的下端安装有升降支腿,所述升降支腿包括两个支腿油缸,两个所述支腿油缸的输出端固定连接有橡胶底座,其中一个所述橡胶底座的一侧安装有到位检测开关,在装卸臂法兰与船舶法兰自动对接后自动放下升降支腿至甲板面,更加稳定。
11.本发明的有益效果包括:
12.本发明通过设置视觉识别装置和卫星定位装置,计算出船舶法兰的精确位置,并可以实时对装卸臂法兰位置进行定位,方便自动化精准的进行快速对接,油液装卸的工作
效率高,并且不会产生油液泄漏;并且本发明设置锁紧机构,锁紧机构可自动打开,装卸臂内外臂自由动作,装卸臂接口法兰可自动靠近船舶法兰进行对接,提高工作效率;并且装卸臂接口法兰盲板自动翻转,可调支腿自动升降,与船舶法兰实现全程自动对接,提高工作效率和对接的安全性。
附图说明:
13.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
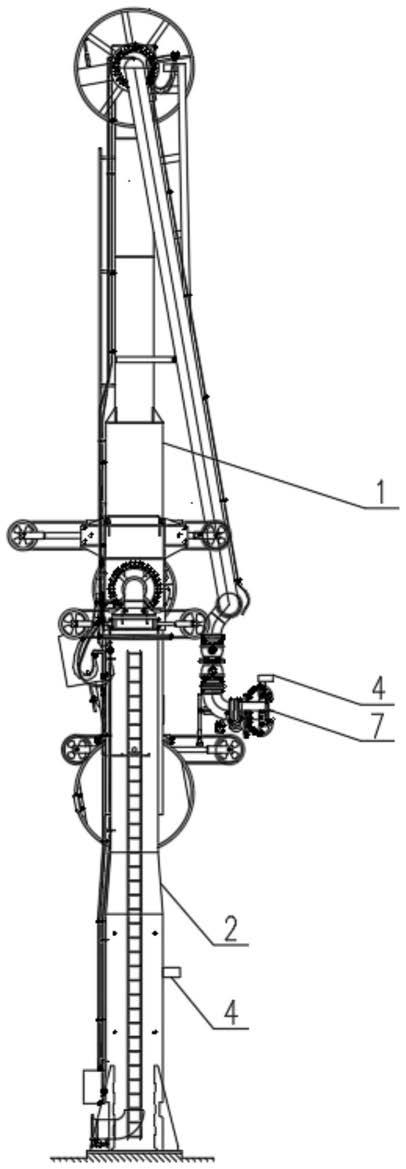
14.图1为本发明的正视结构示意图;
15.图2为本发明的侧视结构示意图;
16.图3为本发明的锁紧机构的结构示意图;
17.图4为本发明的盲板开合机构的结构示意图;
18.图5为本发明的升降支腿的结构示意图。
19.图中:1、装卸臂本体;2、装卸臂立柱;3、三维接头;4、视觉识别装置;5、锁紧机构;51、油缸;52、短环链;53、操纵杆;54、锁紧销;6、升降支腿;61、支腿油缸;62、橡胶底座;63、到位检测开关;7、盲板开合机构;71、螺旋式摆动油缸;72、支架;73、盲板;74、减振垫;8、卫星定位装置。
具体实施方式:
20.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
21.实施例1
22.如图1-2所示的智能化流体装卸臂,包括装卸臂本体1和装卸臂立柱2,装卸臂本体1通过装卸臂立柱2连接于安装面上,装卸臂本体1的端部安装有三维接头 3,装卸臂立柱2的表面一侧安装有视觉识别装置 4,视觉识别装置4包括两套工业相机。
23.现有技术下,普通的装卸臂无法自动化精准与船舶法兰进行对接,容易造成油液装卸的工作效率低,并且容易产生油液泄露。
24.在本实施例中,当槽船靠泊后,位于装卸臂立柱2附近的视觉识别装置4对船舶流体介质出口法兰进行识别并定位,先进行初定位,将装卸臂的接船法兰移至船舶法兰附近,再通过接船法兰附近的视觉识别装置4进行精定位,计算出船舶法兰的精确位置,再进行移动并抓取,与一步定位相比,大幅度的降低了成本,方便将三维接头3自动对接至船舶法兰上。
25.本实施例中进一步的,三维接头3的弯管上安装有卫星定位装置8,可以实时对装卸臂法兰位置进行定位,随后控制系统驱动装卸臂进行对接。
26.实施例2
27.请参阅图3,在实施例1的基础上做了进一步改进:
28.为了便于自动解除锁定,装卸臂立柱2的一侧安装有锁紧机构5,锁紧机构5包括油缸 51,油缸51的输出端连接有短环链 52,短环链52的上端连接有操纵杆53,操纵杆53的上
方安装有锁紧销54;
29.在本实施例中,对船舶法兰进行识别并定位后,plc控制液压系统工作,液压系统驱动油缸51收缩,油缸51通过短环链52和操纵杆53拉动锁紧销54,锁紧机构5自动打开,装卸臂内外臂自由动作,装卸臂接口法兰自动靠近船舶法兰。
30.实施例3
31.请参阅图4,在实施例1的基础上做了进一步改进:
32.为了便于自动打开盲板73,三维接头3上安装有盲板开合机构7,盲板开合机构7包括螺旋式摆动油缸71,螺旋式摆动油缸71的输出端安装有支架72,支架72远离螺旋式摆动油缸71的一端固定连接有盲板73,盲板73的密封面上安装有减振垫74;
33.在本实施例中,装卸臂法兰至船舶法兰附近后,视觉识别装置4再次对船舶法兰进行精确定位并自动打开盲板73,打开盲板73时,plc控制液压系统工作,液压系统驱动螺旋式摆动油缸71旋转,摆动油缸通过支架72带动盲板73旋转,从而使盲板73自动开合,并且盲板73带减震垫,避免密封面损伤。
34.实施例4
35.请参阅图5,在实施例1的基础上做了进一步改进:
36.为了保证装卸臂法兰对接后的稳定支撑,三维接头3的下端安装有升降支腿 6,升降支腿6包括两个支腿油缸 61,两个支腿油缸61的输出端固定连接有橡胶底座62,其中一个橡胶底座62的一侧安装有到位检测开关63;
37.在本实施例中,装卸臂法兰与船舶法兰自动对接并自动放下升降支腿6至甲板面,升降支腿6使用时,plc控制液压系统工作,液压系统驱动支腿油缸61升降,2个油缸油路为串联形式,保护到位安全保护,橡胶底座62降至甲板面后,油压升高,液压系统配有溢流阀,当达到设定压力时,液压油通过溢流阀直接流至液压站,停止动作,并且橡胶底座62上装有到位检测开关63,到位后自动停止动作。
38.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。