1.本发明涉及智能交通控制技术领域,尤其是涉及交织路段交通通行控制方法。
背景技术:
2.交织路段以其会车距离短、交通冲突多、事故风险大等特点形成拥堵引发点,在高峰时间经常导致一个区域道路拥堵甚至瘫痪。行经交织路段的车辆为了选择目的地需在交织路段有限距离内跨越一条或多条车道进入目的车道,由于合、分流的距离短,在合流、分流过程中容易产生冲突,使得车流呈现高度紊乱状态,导致交织路段通行能力大幅降低、行车风险急剧提升。
3.目前主流的交织路段的控制方式分为两种:
4.一是自由交织模式,如图1所示:
5.当遇到来自不同车道的机动车流经过一段很短的共用车道后又要分别去往不同方向的车道时,由于需要变换车道的机动车位置不固定,冲突点多,导致这段共用车道形成拥堵引发点。
6.二是信号灯控制模式,如图2所示:
7.在进入交织路段前设置信号灯,a口的两条车道共用一个信号灯相位,b口的两条车道共用一个信号灯相位。通过对a/b口进行信号灯相位转换,来控制交织路段的通行顺序。其好处是a口和b口的车辆在通行过程中不会发生冲突,但是同一方向两条车道之间的车辆在进入交织路段进行变道过程中依然会发生冲突。
8.而且,在对a/b口进行信号灯相位转换时,一种方式是:a口的车辆比b口的车辆先到达停止线,就控制a口对应的信号灯为通行状态,这种方式没有考虑车道上存在等待车辆的情况,虽然a口的车辆先到达停止线,但很可能a口到达停止线的车辆之后仅有少量车辆,而b口到达停止线的车辆之后跟有很多车辆,这种信号灯相位转换方式会造成b口大量拥堵。另一种方式是:采用排队长度阈值放行原则,当车道上车辆排队长度(也就是等待车辆的数量)大于阈值时,控制相应车道对应的信号灯为通行状态。但是当两个车道都有车辆排队等待时,实际情况中往往存在一个车道陆续排队很长的情况,很容易造成一个车道一直放行,而另一个车道一直排队等待。这样会造成下游车道一个车道闲置,无车辆通行,降低了道路使用效率。
9.综上所述,上述控制方式都极易引发交通冲突,形成拥堵引发点以及道路使用效率低等问题。
技术实现要素:
10.有鉴于此,本发明提出一种交织路段交替通行控制方法,解决了现有的交织路段由于机动车变换车道的位置以及方向不固定、交通信号灯控制方式与实际交通情况不匹配而存在的交织路段通行效率较低以及道路使用效率低的问题,以满足交通出行者需求,提高交织路段出行效率和安全性。
11.为此,本发明提供了以下技术方案:
12.本发明提供了一种交织路段交替通行控制方法,所述交织路段至少具有两个驶入方向和两个驶出方向,第一车道和第二车道设置在第一驶入方向,第三车道和第四车道设置在第二驶入方向,第五车道和第六车道设置在第一驶出方向,第七车道和第八车道设置在第二驶出方向,第二车道和第三车道在交织路段汇合,形成交织路段共用车道,所述交织路段共用车道下游分别连接所述第六车道和第七车道;所述第二车道上在进入所述交织路段共用车道的入口处设置第一信号灯和第一停止线,所述第三车道上在进入所述交织路段共用车道的入口处设置第二信号灯和第二停止线;所述方法包括:
13.分别获取所述第二车道和所述第三车道的车道交通状态信息;所述车道交通状态信息包括:当前时刻任一辆车的行驶速度、平均车头间距、任一车辆距离相应停止线的距离、任一车辆前方的等待车辆数以及车流量;
14.确定信号灯的相位切换周期;
15.在每个切换周期,根据所述车道交通状态信息确定所述第二车道和所述第三车道上是否有等待车辆;
16.当所述第二车道和所述第三车道上均有等待车辆时,根据所述车道交通状态信息和车道的等待时间代价函数分别计算所述第二车道和所述第三车道上所有车辆的等待时间总和;车道上所有车辆的等待时间总和能够反映所述车道的总体延误时间,所述车道的等待时间代价函数如下:
[0017][0018]
其中:wtim为所述车道的停止线后检测区域内每台车辆需要等待时长的总和;i代表第i时刻;j代表车道上第j辆车;δ为信号灯转换时间常数;λ
gap
为绿间隔;n为所述车道的停止线后检测区域内所有等待通行车辆的总数;gi为第i时刻所述车道对应的信号灯绿灯时长,gi根据第i时刻信号灯的相位切换周期、所述车道的车流量比以及所述第二车道和所述第三车道的车流量比之和计算得到;t
ij
表示当红灯亮启时,第i时刻车辆j到达停车线时红灯已亮的时间;t
ij
根据第i时刻车辆j的行驶速度、平均车头间距、车辆j距离相应停止线的距离以及车辆j前方的等待车辆数计算得到;
[0019]
根据所述第二车道和所述第三车道的总体延误时间,控制所述第一信号灯和所述第二信号灯的相位。
[0020]
进一步地,t
ij
由公式计算:
[0021]
其中:vj为车辆j的行驶速度,d为平均车头间距;sj为车辆j距离停止线的距离;lj为车辆j前方的等待车辆数。
[0022]
进一步地,确定当前时刻信号灯的切换周期,包括:
[0023]
根据韦伯斯特配时法,第i时刻信号周期为:
[0024]
其中,λi为第i时刻车辆启动损失时间;ηi为第i时刻所述第二车道车流量比η
1i
和所述第三车道车流量比η
2i
之和,即ηi=η
1i
η
2i
;;q
1i
为第i时刻所述第
二车道的车流量;q
1i
为第i时刻所述第三车道的车流量;s为车道饱和车流量。
[0025]
进一步地,所述第二车道上自所述第一停止线起沿车辆行驶方向反方向每隔第一预设距离设置有一个车道雷达传感器;所述第三车道上自所述第一停止线起沿车辆行驶方向反方向每隔第一预设距离设置有一个雷达传感器;所述第二车道上沿行驶方向反方向距离所述第一停止线第二预设距离处设置有一个磁感线圈;所述第三车道上沿行驶方向反方向距离所述第二停止线第二预设距离处设置有一个磁感线圈;
[0026]
相应地,分别获取两个车道的交通状态信息,包括:
[0027]
利用设置的雷达传感器分别获取所述第二车道和所述第三车道中当前时刻任一车辆的行驶速度、平均车头间距和任一车辆距离相应停止线的距离;
[0028]
利用磁感线圈获取两个车道的车流量。
[0029]
进一步地,在根据所述车道交通状态信息确定所述第二车道和所述第三车道上是否有等待车辆之前,还包括:
[0030]
获取所述交织路段共用车道下游出口车流的平均车速;
[0031]
根据所述车流的平均车速确定拥堵状态;
[0032]
当所述交织路段共用车道下游出口处于拥堵状态时,将存在待驶入所述交织路段共用车道车辆所在的车道对应的信号灯设置为红灯;
[0033]
当所述交织路段共用车道下游出口处于非拥堵状态时,根据所述车道交通状态信息确定所述第二车道和所述第三车道上是否有等待车辆。
[0034]
进一步地,根据所述第二车道和所述第三车道的总体延误时间,控制所述第一信号灯和所述第二信号灯的相位,包括:
[0035]
设所述第一信号灯当前相位为绿灯,在经过所述第一信号灯的最小绿灯时长之后,比较所述第二车道的总体延误时间和所述第三车道的总体延误时间;
[0036]
若所述第二车道的总体延误时间小于所述第三车道的总体延误时间,则控制所述第一信号灯和所述第二信号灯切换相位;
[0037]
若所述第二车道的总体延误时间大于等于所述第三车道的总体延误时间,则保持所述第一信号灯和所述第二信号灯的不变;
[0038]
若所述第一信号的灯绿灯时长达到最大时长或所述第二信号的灯绿灯时长达到最大时长,则控制所述第一信号灯和所述第二信号灯切换相位。
[0039]
进一步地,当所述第二车道和所述第三车道上均没有等待车辆时:
[0040]
根据所述车道交通状态信息确定车辆先到达对应停止线的车道,控制所述车道对应的信号灯为绿灯。
[0041]
进一步地,当所述第二车道绿灯时间达到最大时长仍有车辆等待通行且所述第三车道没有车辆等待时,控制所述第一信号灯保持绿灯,重新记录所述第一信号灯的绿灯持续时间,并更新所述第一信号灯绿灯时间最大时长;
[0042]
所述第三车道绿灯时间达到最大时长仍有车辆等待通行且所述第二车道没有车辆等待时,控制所述第二信号灯保持绿灯,重新记录所述第二信号灯的绿灯持续时间,并更新所述第一信号灯绿灯时间最大时间。
[0043]
本发明的优点和积极效果:
[0044]
本发明提供的交织路段交替通行控制方法,采用精准计算车道上各个车辆延误时
间,通过延误时间控制通行,并设置最大通行时间,对交织路段交通控制提供一个全新的思路,实现了对路网流量的重新分配,让路网中交通流的时空分布趋于均匀,可以降低交通拥堵发生的概率,有效提高道路通行效率,从而提高下游车道的道路占有率,让路网运行状态更优。针对交织路段(如大连市东北路-彩云路)在工作日早晚高峰车流量均较大,经常拥堵的现状,采用该控制方法精准高效解决了交织路段拥堵问题。
[0045]
本发明基于韦伯斯特公式,将信号控制影响因素增加了损失时间、交织区车流量因素,全面掌握考虑交织路段运行状态,最大限度更好更精确减少交织区车道总体延误时间,实现交织路段交替通行效率的提升。不同于现有技术中单纯考虑排队长度,仅从表象上压缩了单一车道的延误时间,而忽略了两条车道的总体延误时间,很多时候会增大总体延误时间,从而降低整个交织路段的通行效率。
附图说明
[0046]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0047]
图1为交织路段的自由交织模式示意图;
[0048]
图2为交织路段的信号灯控制模式示意图;
[0049]
图3为本发明实施例中交织路段预置标志标线示意图;
[0050]
图4为本发明实施例中交织路段全息感知自适应控制模式示意图;
[0051]
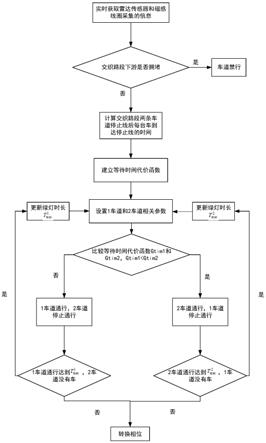
图5为本发明实施例中交织路段交替通行控制方法的流程图。
具体实施方式
[0052]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0053]
本发明中,通过深入分析交织路段结构特点,提出了一种交织路段精细化控制方式,采用设置标志标线,在进入交织路段前,提前规范出行目标方向车道,具体地,交织路段至少具有两个驶入方向和两个驶出方向,第一车道和第二车道设置在第一驶入方向,第三车道和第四车道设置在第二驶入方向,第五车道和第六车道设置在第一驶出方向,第七车道和第八车道设置在第二驶出方向,第二车道和第三车道在交织路段汇合,形成交织路段共用车道,所述交织路段共用车道下游分别连接所述第六车道和第七车道。如图3所示,将入口a的a1车道直通出口c的c1车道,将入口b的b2车道直通出口d的d2车道,通行过程中不准变换车道;将入口a的a2车道和入口b的b1车道交织路段区域进行变换车道,这样两条外车道的车辆在前往各自目的地的通行过程中,不会发生拥堵和冲突,有效降低通过交织路段车辆的变道次数,提高通行效率。
[0054]
为了进一步提高通行效率,缓解图3中交织路段控制方式下两条内车道在前往各
自目的地的通行过程中存在的车辆变道冲突的问题,本发明实施例中进行了信号灯的设置,具体地,第二车道的下游设置有第一停车线以及第一信号灯,第三车道的下游设置有第二停车线以及第二信号灯。如图4所示,在设置标志标线的基础上,在a2和b1车道处分别设置信号灯。在a2和b1处设置信号灯的好处是车辆会有序交替通行,当a2处为绿灯时,a2处的车辆可以顺利到达d1。当b1为绿灯时b1处的车辆可以顺利到达c2。
[0055]
在对信号灯的相位控制时,本发明中根据雷达传感器精确获取车道每一辆车的速度和位置信息,从而计算出每一辆车到停止线的时间,通过车辆排队等待时间建立时间等待代价函数,计算求得车道的总体延误时间,以车道的总体延误时间小作为交通信号灯的控制目标,动态改变交通信号灯的绿灯时长,从而提高道路上车辆的通行效率。
[0056]
如图5所示,其示出了本发明实施例中一种交织路段交替通行控制方法的流程图,该方法包括以下步骤:
[0057]
s1、实时获取雷达传感器和磁感线圈采集的信息,并计算得到交织路段a2和b1车道的车道交通状态信息;
[0058]
基于雷达传感器以及磁感线圈可以获取交织路段a2和b1车道上停止线后检测区域内任意车辆的实时速度、位置、车流量等信息,根据实时速度和位置等信息计算出如平均车头间距、车辆距离相应停止线的距离、车辆前方的等待车辆数等反映车道交通状态的信息。
[0059]
雷达传感器从两个车道(a2和b1)的停止线开始至检测区域内每隔第一预设距离设置一个,第一预设距离通常为100m-120m,检测区域为从车道停止线起至行驶方向反方向1350米的区域内,相应地,雷达传感器的感知区域长度为1350米。磁感线圈设置在车道上沿行驶方向反方向距离停止线第二预设距离的位置,一条车道安装一个,一共安装两个,第二预设距离为检测区域的边界点,也为1350米。在具体实现中,第一预设距离、第二预设距离以及检测区域可以根据实际路段长度以及雷达传感器的精度进行设置。
[0060]
s2、计算交织路段a2和b1车道停止线后检测区域内每台车辆到达停止线的时间;
[0061]
s3、判断交织路段下游出口是否拥堵;
[0062]
在交织路段下游出口处,车道c2上自交织路段分离点起沿车辆行驶方向间隔第一预设距离设置有两个雷达传感器,第一预设距离通常为100~120米。同样地,在车道d1上自交织路段分离点起沿车辆行驶方向间隔第一预设距离设置有两个雷达传感器。通过雷达传感器监测交织路段下游车流平均速度,通过判断平均速度是否小于或等于阈值来确定交织路段下游是否拥堵;通常阈值设为15公里/小时,如平均速度小于等于阈值,则视为拥堵。
[0063]
s4、当交织路段下游出口拥堵时,将第一信号灯和第二信号灯设为禁行状态(红灯),防止车辆跟进塞死交织区;
[0064]
s5、当交织路段下游出口畅通时,即通过雷达传感器监测交织路段下游车流平均速度大于15公里/小时,分三种情形对交织路段a2和b1车道的交通信号进行控制(因为只考虑两条车道,为方便表述,下面将其分别称为车道1和车道2):
[0065]
设定两车道信号灯绿灯时间最小时长和最大时长;两车道信号灯绿灯时间设定最小和最大时长分别为和(为固定值,一般为2s;会在实际运行过程中进行更新)。
[0066]
①
当车道1和车道2都没有车辆等待时:
[0067]
基于雷达传感器检测到的实时速度、位置信息,哪条车道的车辆先到停止线,先让其车道为绿灯。
[0068]
②
当车道1实际绿灯时间达到最大时长仍有车辆等待通行且车道2无车辆等待时:
[0069]
车道1信号保持绿灯,绿灯时间持续时间重新统计,并更新
[0070]
当车道2实际绿灯时间达到最大时长仍有车辆等待通行且车道1无车辆等待时:
[0071]
车道2信号保持绿灯,绿灯时间持续时间重新统计,并更新
[0072]
③
当车道1和车道2均有车辆等待时:
[0073]
设车道1此时为绿灯,在经过最小绿灯时长之后,需要不断比较两条车道的等待时间代价函数,判断是否变换交通信号灯相位。
[0074]
等待时间代价函数:准确的反应两条车道每台车辆等待时间的集合,可以准确反映两条车道总体延误时间。引入韦伯斯特法,使得等待时间代价函数考虑更多影响车道交通状况的因素,如损失时间、车流量、车道饱和流量,从而使等待时间代价函数更好的反映车道交通运行状态,更好的控制交通信号灯。具体地:
[0075]
对两条车道定义等待时间代价函数wtim1和wtim2,函数值非负,初始值设定为0,等待时间代价函数wtim1和wtim2的计算方式如下所示:
[0076][0077][0078]
其中:
[0079]
wtim1为1车道(单车道)停止线后检测区域内每台车辆需要等待时长的总和;
[0080]
wtim2为2车道(单车道)停止线后检测区域内每台车辆需要等待时长的总和;
[0081]
i代表第i时刻;
[0082]
j代表车道上第j辆车;
[0083]
δ为信号灯转换时间常数,也就是信号灯黄灯时长,通常为3s;
[0084]
λ
gap
为绿间隔,根据路口车流量预设,通常设为2s;
[0085]
n1为1车道停止线后检测区域内所有等待通行车辆的总数;
[0086]
n2为2车道停止线后检测区域内所有等待通行车辆的总数;
[0087]g1i
为理论计算出的第i时刻第一信号灯绿灯时长,g
1i
满足约束条件:
[0088]
当g
1i
取进行计算。
[0089]g2i
为理论计算出的第i时刻第二信号灯绿灯时长,g
2i
满足约束条件:
[0090]
当g
2i
取进行计算。
[0091]
根据韦伯斯特配时法,第i时刻信号周期为:
[0092]
其中,λi为第i时刻车辆启动损失时间(雷达传感器测量停止线后第一辆车的启动时间);ηi为第i时刻1车道车流量比η
1i
和2车道车流量比η
2i
之和,即ηi=η
1i
η
2i
;q
1i
为第i时刻1车道车流量,由1车道上布置的磁感线圈测量得到;q
1i
为第i时刻2车道车流量,由2车道上布置的磁感线圈测量得到;s为1、2车道饱和车流量,在设计道路时给定数值,为常数;
[0093]
t
ij
表示当红灯亮启时,第i时刻车辆j到达停车等待点时,红灯已亮的时间;根据停车等待点位于车辆遇红灯停车位置,它是停止线或紧邻遇红灯已停车的后面;t
ij
可由公式计算:
[0094]
其中:vj为第i时刻车辆j的行驶速度,d为平均车头间距;sj为车辆j距离停止线的距离;lj为车辆j前方的等待车辆数,d、sj、lj均可由车道上安装的雷达传感器测量得到。
[0095]
公式(1)和(2)的含义是:先求得每条车道上每辆车的等待时间,准确反应两条车道每台车辆等待时间的集合,再对每条车道上所有车辆的等待时间进行求和,以准确反应两条车道总体延误时间。
[0096]
若wtim1<wtim2,则1车道变为红灯,2车道变为绿灯。
[0097]
若wtim1≥wtim2,则保持信号灯不变。
[0098]
若信号灯绿灯时长达到最大时长或则1车道和2车道信号灯将进行切换。
[0099]
时间等待代价函数基于韦伯斯特法,考虑了多种车道延迟因素,如损失时间,车流量,车道饱和流量等,能够更全面准确的反应实际车道交通运行状态,通过时间等待代价函数大小实现道路通行切换,提高了道路通行效率。
[0100]
本发明实施例中,通过交织路段精细化组织,预先设置标志标线和信号灯,根据全息感知实时跟踪每一台车辆的当前位置、当前速度和当前时刻到达停止线的时间等数据,综合分析交织路段交通流特点,制定相应的控制策略,实现交织路段交通信号自适应控制,满足来自不同方向交通流去往不同目的地的需求,确保车辆能够安全、快速地通过交织路段,消除交织路段的拥堵瓶颈,降低了交通事故的发生率。
[0101]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
