1.本发明涉及半导体晶片加工。
背景技术:
2.在对半导体晶片进行各种加工操作之前,需要确定半导体晶片的取向。一些用于识别晶片取向的方法可以包括在晶片的周缘上设置凹口,并且利用装置来转动晶片,使得可以通过传感器来检测凹口以便确定晶片以期望的取向定向。
技术实现要素:
3.本公开有利地提供了一种设备,其包括:基座;设置在基座上的驱动装置,该驱动装置具有输出轴,输出轴具有晶片接收表面,驱动装置配置为使输出轴围绕转动轴线转动;设置在基座上的传感器单元,该传感器单元配置为感测接收在晶片接收表面上的晶片;和配置为使在驱动装置与传感器单元之间的平移机构接合和断开的接合装置,其中,当接合装置接合平移机构时,输出轴借助于驱动装置而围绕转动轴线的转动改变传感器单元与转动轴线之间的相对位置关系。
4.本公开还有利地提供了一种设备,其包括:基座;设置在基座上的驱动装置,该驱动装置具有输出轴,输出轴具有晶片接收表面,驱动装置配置为使输出轴围绕转动轴线转动;设置在基座上的传感器单元,该传感器单元配置为感测接收在晶片接收表面上的晶片;和可滑动地耦接基座的托架,传感器单元安装在托架上;和配置为使在驱动装置与托架之间的耦接件接合和断开的接合装置,其中,当接合装置接合耦接件时,驱动装置引起的输出轴围绕转动轴线的转动改变传感器单元与转动轴线之间的相对位置关系。
5.本公开另外还有利地提供了一种方法,其包括:提供一种设备,所述设备包括:基座;设置在基座上的驱动装置,该驱动装置具有输出轴,输出轴具有晶片接收表面,驱动装置配置为使输出轴围绕转动轴线转动;设置在基座上的传感器单元,该传感器单元配置为感测接收在晶片接收表面上的晶片;和配置为使在驱动装置与传感器单元之间的平移机构接合和断开的接合装置,和通过驱动装置使输出轴围绕转动轴线转动以改变传感器单元与转动轴线之间的相对位置关系;和使在驱动器装置与传感器单元之间的平移机构断开,并且通过驱动装置使输出轴围绕转动轴线转动以使晶片在晶片接收表面上转动。
附图说明
6.参照以下的详细说明,特别是当结合所附附图考虑时,对本发明及其许多伴随而来的优点的更完整的理解将会变得显而易见,其中:
7.图1是根据本发明的实施例的晶片预对准设备的前左侧立体图;
8.图2是图1所示的晶片预对准设备的俯视平面图,其中外壳体示出为透明的;
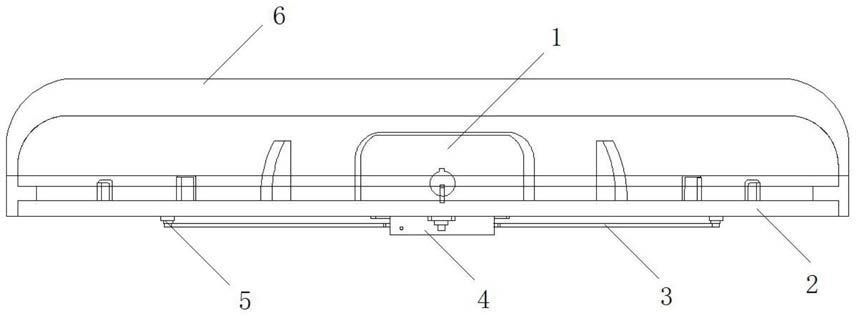
9.图3是图1所示的晶片预对准设备的前侧正视图,其中外壳体示出为透明的;
10.图4是沿着图3中的线4
‑‑
4所截取的晶片预对准设备的剖视图;
11.图5是图1所示的晶片预对准设备的左侧正视图,其中外壳体示出为透明的;
12.图6是沿着图5中的线6
‑‑
6所截取的晶片预对准设备的剖视图;
13.图7是图1所示的晶片预对准设备的底部正视图,其中外壳体示出为透明的;
14.图8a是底板处于第一位置时的晶片预对准设备的转动构件和底板的仰视示意图,而图8b是底板处于第二位置时的图8a的转动构件和底板的仰视示意图;
15.图9是根据替代实施例的晶片预对准设备的转动构件和底板的仰视示意图;
16.图10a是根据另一替代实施例的、底板处于第一位置时的晶片预对准设备的转动构件和底板的仰视示意图,而图10b是底板处于第二位置时的图10a的转动构件和底板的仰视示意图;
17.图11a是根据又一替代实施例的、底板处于第一位置时的晶片预对准设备的转动构件和底板的仰视示意图,而图11b是底板处于第二位置时的图11a的转动构件和底板的仰视示意图;
18.图12是根据再一替代实施例的晶片预对准设备的转动构件和底板的仰视示意图;
19.图13示出离合器的实施例,该离合器配置为使从驱动装置的输出轴的转动至转动构件的转动的动力传递接合和断开,并且使从驱动装置的输出轴的转动至与转动构件接合的线性构件的动力传递接合和断开;和
20.图14是可以实施本发明的预对准设备的实施例的计算机的示意图。
具体实施方式
21.下文将参考所附附图说明本发明的实施例。在下面的说明中,具有基本相同的功能和布置的构成元件由相同的附图标记来表示,而仅在必要时才会进行重复说明。
22.本文描述了一种有利地适应各种半导体晶片直径的半导体晶片预对准设备。
23.半导体晶片可以设置有凹口或标记,其可以用于识别晶片的取向,以便确保晶片处于期望的取向以便加工。例如,可以在晶片的周缘上设置单个凹口。如果预对准设备设置有支撑和转动晶片的晶片平台,以及在晶片转动时扫描晶片边缘的固定读取头,则这种设备具有明显的缺点。对于这种设备,读取头的传感器范围可能只有20mm,因此传感器必须针对不同直径的晶片径向定位。
24.本文描述的半导体晶片预对准设备有利地使用同一电机来转动晶片和径向移动读取头,以允许对不同尺寸的晶片使用。在设备的一个实施例中,当设备需要径向移动读取头时,执行器(比如气缸或螺线管)朝向转动齿轮线性地驱动齿条齿轮。转动齿轮刚性地附接到转动电机。一旦接合,电机就可以将齿条和读取头驱动到适当的径向位置。
25.图1示出了设备100,设备100例如可以用作半导体晶片对准设备来对准半导体晶片以进行检查和/或进行加工。设备100可以有利地与对具有各种直径的半导体晶片使用,如图1所示的同心圆10所示。
26.设备100包括基座200、驱动装置300、传感器单元400和接合装置600。
27.图1所示的基座200包括壳体(或外壳体)210,壳体210包括上壁212、下壁214、第一侧壁216、第二侧壁218、第三侧壁220和第四侧壁222。上壁212包括供驱动装置300的一部分延伸穿过的开口224。上壁212还包括供传感器单元400的一部分延伸穿过的槽226。槽226允许传感器单元400与驱动装置300之间的相对运动。基座200可以以固定的方式安装到支撑
件上(例如通过相对于制造设施的地板固定基座200),或者以可移动的方式安装到支撑件上(例如通过将基座200安装在可移动台上,该可移动台可以使用驱动电机提供相对于地板沿着x轴、y轴和z轴的移动)。基座200可以通过将下壁214安装到支撑件,或者通过将壳体210的其他壁中的一个安装到支撑件来安装。
28.驱动装置300设置在基座200上。驱动装置300具有输出轴302,输出轴302具有安装到输出轴302的远端303的晶片平台304。晶片平台304具有晶片接收表面306,晶片接收表面306配置为接收半导体晶片。晶片接收表面306支撑晶片(见圆圈10)并且可以设置有表面材料,该表面材料提供晶片与晶片接收表面306之间的摩擦,以防止晶片相对于晶片接收表面306移动。替代地,或者除了表面材料之外,晶片接收表面306可以设置有抽吸孔,并且晶片平台304可以设置有抽吸装置以将晶片保持在晶片接收表面306上,以防止晶片相对于晶片接收表面306移动。晶片平台304可以固定至输出轴302的远端303,使得晶片平台304不相对于输出轴302转动。替代地,晶片平台304可以耦接到远端303,使得晶片平台304可以选择性地相对于输出轴302转动或不相对于输出轴302转动,例如使用离合器,该离合器配置为接合和断开输出轴302的转动至晶片平台304的转动的传递。
29.驱动装置300配置为使输出轴302围绕转动轴线302a转动。驱动装置300例如可以是电动机。驱动装置300包括安装到壳体210的壳体310。在图1-图4所示的实施例中,壳体310以固定的方式安装到上壁212;然而,壳体310可以替代地安装到基座200的壳体210的另一壁。驱动装置300包括以固定关系安装到壳体310的定子312和相对于定子312转动的转子314。转子314经由轴承316由转动支撑件315支撑,转动支撑件315以固定关系安装到壳体310。输出轴302是转子314的一部分或连接到转子314,使得转子314的转动导致输出轴302围绕转动轴线302a转动。
30.输出轴302包括具有下端320的下部318。转动构件322耦接到输出轴302的下端320。转动构件322可以固定到下端320,使得转动构件322不相对于输出轴302转动。替代地,转动构件322可以耦接到下端320,使得转动构件322可以选择性地相对于输出轴302转动或不相对于输出轴302转动,例如使用离合器,该离合器配置为接合和断开输出轴302的转动至转动构件322的转动的传递。
31.传感器单元400设置在基座200上。传感器单元400配置为感测接收在晶片接收表面306上的晶片。传感器单元400包括读取头402,读取头402具有光学传感器404,光学传感器404在-z方向上朝向晶片的上表面(参见例如图3和图6),光学传感器404可以在感测区域406内感测晶片,比如晶片的边缘或在其上形成的标记/凹口,以便使半导体晶片对准来进行检查和/或加工。读取头402安装到支撑构件408,支撑构件408从壳体210内延伸穿过槽226。
32.设备100包括在驱动装置300与传感器单元400之间的平移机构500。平移机构500包括托架410,托架410可滑动地耦接基座200,并且传感器单元400经由支撑构件406安装在托架410上,支撑构件406安装到托架410。在图1-图7所示的实施例中,驱动装置300的壳体310安装到基座200的壳体210,并且第一滑动构件330和332安装到壳体310的相对的外表面。替代地,第一滑动构件330和332可以直接安装到壳体210的壁。托架410包括固定在其上的第二滑动构件412和414。第二滑动构件412和414分别由第一滑动构件330和332可滑动地支撑,以允许托架410沿着x轴滑动。在图1-图7所示的实施例中,第一滑动构件330和332分
别具有沿x轴纵向延伸的槽331和333,第二滑动构件412和414是分别设置在槽331和333内的滑轨;然而,可替换地,第二滑动构件412和414可以设置有沿x轴纵向延伸的槽,并且第一滑动构件330和332可以是设置在槽中的滑轨。
33.平移机构500还包括耦接到输出轴302的转动构件322和连接到托架410的线性构件440。在图1-图7的实施例中,线性构件440是具有齿441的线性布置的齿条。线性构件440安装在底板442上,底板442分别通过屈曲件450和460安装到第二滑动构件412和414。因此,线性构件440经由底板442和屈曲件450和460连接到托架410。屈曲件450和460的上端452和462固定地安装到第二滑动构件412和414,屈曲件450和460的下端454和464固定地安装到底板442的相对侧。屈曲件450和460是柔性元件,当悬臂力围绕固定的上端452和462施加到下端454和464时,柔性元件可以弯曲。托架410、底板442和屈曲构件450和460形成四连杆结构。
34.接合装置600配置为使在驱动装置300和传感器单元400之间的平移机构500接合和断开,使得当接合装置600接合平移机构时,输出轴302借助于驱动装置300而围绕转动轴线302a的转动改变传感器单元400与转动轴线302a之间的相对位置关系,从而改变传感器单元400和晶片接收表面306之间的相对位置关系。此外,当接合装置600断开平移机构500时,输出轴302借助于驱动装置300而围绕转动轴线302a的转动不会改变传感器单元400与转动轴线302a之间的相对位置关系。
35.接合装置600包括执行器602,执行器602配置为移动线性构件440使其与转动构件322的外周表面324接触,以将线性构件440与转动构件322接合。在图1-图7所示的实施例中,执行器602配置为使线性构件440移动至与转动构件322的外周表面324接触,以使线性构件440的齿441与转动构件322的外周表面324上的齿326接合。
36.在图1-图7所示的实施例中,执行器602是气缸610,其在致动时沿y轴延伸活塞杆612。执行器600可以替代地是螺线管。当气缸610未被致动时,活塞杆612通过比如弹簧的内部偏置构件沿y轴缩回。气缸610具有带有支撑构件613的第一端611,支撑构件613将第一端611连接到支架614。支架614安装到托架410以保持气缸的第一端611与托架410处于固定关系。活塞杆612具有安装到其终端的耦接构件616。耦接构件616随着活塞杆612的运动沿着y轴延伸和缩回。耦接构件616通过销618耦接到连接构件620,连接构件620固定地安装到底板442。
37.执行器602的致动使屈曲构件450和460弯曲,以使线性构件440移动成与转动构件322的外周表面324接触,从而将线性构件440与转动构件322接合。当执行器602致动时,气缸610沿着y轴延伸活塞杆612,从而沿着y轴移动耦接构件616,这经由销618和连接构件620推动底板442,由此弯曲屈曲构件450和460并移动安装到底板442的线性构件440。因此,执行器602的致动将线性构件440从线性构件440的齿441不与转动构件322的齿326接合的断开位置移动到线性构件440的齿441与转动构件322的齿326接合(即,与转动构件322的齿326接合)的接合位置。当停止执行器602的致动时,气缸610沿着y轴缩回活塞杆612(例如通过内部偏置构件的力),从而沿着y轴移动耦接构件616,这经由销618和连接构件620拉动底板442,从而允许屈曲构件450和460拉直并且移动安装到底板442的线性构件440。致动的停止将线性构件440从线性构件440的齿441与转动构件322的齿326(即,与转动构件322的齿326接合)接合的接合位置移动到线性构件440的齿441不与转动构件322的齿326接合的断
开位置。
38.例如,可基于齿441和326的接合状态和断开状态之间移动所需的距离(例如,基于线性构件440的齿441的高度和转动构件322的齿326的高度)和预定间隙距离来确定屈曲构件450和460的弯曲或偏转量。在不存在齿,而是使用摩擦接合的实施例中,则可例如基于预定间隙距离来确定屈曲构件450和460的弯曲或偏转量。
39.当线性构件440与转动构件322接合时(即,当线性构件440处于线性构件440的齿441与转动构件322的齿326接合的接合位置时),则输出轴302借助于驱动装置300的转动导致转动构件322的转动,这导致转动构件322的齿326在沿着x轴的方向上驱动线性构件440的齿441。因此,线性构件440、底板442、屈曲件450和460以及托架410在沿着x轴的方向上被驱动,使得第二滑动构件412和414分别沿着第一滑动构件330和332滑动,以允许托架410和传感器单元400在沿着x轴的方向上滑动。因此,当线性构件440与转动构件322接合时,输出轴302由驱动装置300沿顺时针和逆时针方向的转动将导致传感器单元400沿x轴的平移运动,以通过将传感器单元400移动得更靠近或更远离转动轴线302a来改变传感器单元400与转动轴线302a之间的相对位置关系,从而改变传感器单元400和晶片接收表面306之间的相对位置关系。传感器单元400和转动轴线302a之间的相对位置关系的改变允许设备100与各种不同直径的半导体晶片一起使用,从而可以调节传感器单元400和转动轴线302a之间的相对位置关系,使得光学传感器404的感测区域406可以与晶片的外边缘区域对准。因此,可以将传感器单元400和转动轴线302a调节为彼此更靠近以用于较小直径的晶片,并且可以将传感器单元400和转动轴线302a调节为彼此更远离以用于较大直径的晶片。
40.相反,当线性构件440与转动构件322断开时(即,当线性构件440处于线性构件440的齿441未与转动构件322的齿326接合的断开位置时),那么,输出轴302借助于驱动装置300的转动将不会导致转动构件322的齿326在沿着x轴线的方向上驱动线性构件440的齿441。因此,当线性构件440与转动构件322断开时,输出轴302借助于驱动装置300而沿顺时针和逆时针方向的转动将不会导致传感器单元400沿x轴的平移运动,并且因此不会改变传感器单元400与转动轴线302a之间的相对位置关系。因此,当线性构件440与转动构件322断开时,设备100可以用于通过使用驱动装置300来转动晶片和光学传感器404扫描感测区域406中的晶片来执行半导体晶片的对准以进行检查和/或加工。
41.在图1-图7所示的实施例中,接合装置600配置为使在驱动装置300与托架410之间的耦接件550接合和断开。耦接件550包括转动构件322和线性构件440。当转动构件322和线性构件440接合时(即,当线性构件440处于线性构件440的齿441与转动构件322的齿326接合的接合位置时),那么驱动装置300和托架410耦接在一起,使得输出轴302借助于驱动装置300而沿顺时针和逆时针方向的转动将导致传感器单元400沿x轴的平移运动,从而通过移动传感器单元400靠近或远离转动轴线302a,来改变传感器单元400和转动轴线302a之间的相对位置关系,从而改变传感器单元400与晶片接收表面306之间的相对位置关系。相反,当线性构件440与转动构件322断开时(即,当线性构件440处于线性构件440的齿441未与转动构件322的齿326接合的断开位置时),那么驱动装置300和托架410不耦接在一起,使得输出轴302借助于驱动装置300的转动将不会导致转动构件322的齿326在沿着x轴线的方向上驱动线性构件440的齿441。因此,当线性构件440与转动构件322断开时,输出轴302借助于驱动装置300而沿顺时针和逆时针方向的转动将不会导致传感器单元400沿x轴的平移运
动,并且因此不会改变传感器单元400与转动轴线302a之间的相对位置关系。
42.以与图1-图7的实施例相同的方式,图8a和图8b示出了一个实施例,其中转动构件322a配置为具有外周表面324a的齿轮,外周表面324a上设置有齿326a。另外,线性构件440a安装在底板442a上。线性构件440a被配置为具有线性布置的齿441a的齿条。图8a和图8b示出了与转动构件322a接合的线性构件440a(即,线性构件440a处于线性构件440a的齿441与转动构件322a的齿326a接合的接合位置)。因此,在该接合状态下,通过使第二滑动构件412a沿第一滑动构件330a滑动,转动构件322a沿逆时针方向(如图8a所示)的转动将导致底板442a(以及连接的托架和传感器单元)沿x轴沿第一方向20a平移运动。(为了附图简单起见,在图8a和图8b中仅示出了一个第一滑动构件和一个第二滑动构件;然而,可以包括附加的第一滑动构件和第二滑动构件以提供滑动运动的稳定性。)此外,在该接合状态下,通过使第二滑动构件412a沿着第一滑动构件330a滑动,转动构件322a沿着顺时针方向(如图8b所示)的转动将导致底板442a(以及连接的托架和传感器单元)沿着x轴沿着与第一方向20a相反的第二方向22a平移运动。
43.图9-图12示出了本发明的替代实施例。
44.图9示出了其中转动构件322b具有外周表面324b的实施例,外周表面324b可以与线性构件440b的表面441b摩擦接合。外周表面324b和/或表面441b可以设置有表面材料,当这些表面彼此接触时,该表面材料提供这些表面之间的摩擦,以便防止这些表面在转动构件322b转动时相对于彼此滑动。图9示出了与转动构件322b接合的线性构件440b(即,外周表面324b与表面441b接触)。因此,在该接合状态下,通过使第二滑动构件412b沿第一滑动构件330b滑动,转动构件322b沿逆时针方向(如图9所示)的转动将导致底板442b(以及连接的托架和传感器单元)沿x轴沿第一方向20b平移运动。(为了附图的简单起见,在图9中仅示出了一个第一滑动构件和一个第二滑动构件;然而,可以包括附加的第一滑动构件和第二滑动构件以提供滑动运动的稳定性。)此外,在该接合状态下,通过使第二滑动构件412b沿着第一滑动构件330b滑动,转动构件322b沿着顺时针方向的转动将导致底板442b(以及连接的托架和传感器单元)沿着x轴沿着与第一方向20b相反的第二方向平移运动。
45.图10a和图10b示出了转动构件322c设置有带和滑轮装置以将转动构件322c的转动转换为传感器单元的平移的实施例。因此,驱动装置包括滑轮340c和342c,滑轮340c和342c可转动地安装到驱动装置的壳体。转动构件322c具有围绕滑轮340c和342c驱动带344c的外周表面324c。带344c固定到构件440c,构件440c安装在底板442c上。在该实施例中,离合器323c设置在驱动装置的输出轴的下端与转动构件322c之间的接合处。离合器323c配置为接合和断开从输出轴的转动至转动构件322c的转动的动力传递。图10a和图10b示出了由于离合器323c的接合状态和带344c的存在而与转动构件322c接合的构件440c。因此,在该接合状态下,通过使第二滑动构件412c沿第一滑动构件330c滑动,转动构件322c沿逆时针方向(如图10a所示)的转动将导致底板442c(以及连接的托架和传感器单元)沿x轴沿第一方向20c平移运动。(为了附图的简单起见,在图10a和图10b中仅示出了一个第一滑动构件和一个第二滑动构件;然而,可以包括附加的第一滑动构件和第二滑动构件以提供滑动运动的稳定性。)此外,在该接合状态下,通过使第二滑动构件412c沿着第一滑动构件330c滑动,转动构件322c沿着顺时针方向(如图10b所示)的转动将导致底板442c(以及连接的托架和传感器单元)沿着x轴沿着与第一方向20c相反的第二方向22c平移运动。
46.上述和以下描述的离合器可以是允许接合和断开从输出轴的转动至转动构件的转动的动力传递的任何传统离合器。应当注意的是,比如上文关于图10a和图10b描述的离合器可以作为接合装置600结合到图1-图9所示的任何实施例中,从而消除了对执行器602的需要并且消除了底板在y轴方向上移动的需要。因此,转动构件和线性构件可以保持在接合状态,并且离合器可以用于接合或断开从输出轴的转动至转动构件的转动的动力传递,并且因此接合或断开用于使转动构件转动并且因此用于驱动线性构件的运动的输出轴的动力传递。另外,在这种配置中,屈曲件可以由更刚性的材料制成。
47.图11a和图11b示出了转动构件322d设置有固定地连接到转动构件322d的构件340d的实施例。构件340d可以如图所示从转动构件322d的外周表面424d延伸,或者可以在与转动构件322d的转动轴线间隔开的位置处设置在转动构件322d的外边缘上。构件340d通过第一枢转接头344d枢转地连接到臂构件342d。臂构件342d通过第二枢转接头346d枢转地连接到构件440d,以在转动构件322d与构件440d之间提供连接。构件440d安装在底板442d上。在该实施例中,离合器323d设置在驱动装置的输出轴的下端与转动构件322d之间的接合处。离合器323d配置为接合和断开从输出轴的转动至转动构件322d的转动的动力传递。图11a和图11b示出了由于离合器323d的接合状态和包括臂构件342d的连杆存在而与转动构件322d接合的构件440d。因此,在该接合状态下,通过使第二滑动构件412d沿第一滑动构件330d滑动,转动构件322d沿顺时针方向(如图11a所示)的转动将导致底板442d(以及连接的托架和传感器单元)沿x轴沿第一方向20d平移运动。(为了附图的简单起见,在图11a和图11b中仅示出了一个第一滑动构件和一个第二滑动构件;然而,可以包括附加的第一滑动构件和第二滑动构件以提供滑动运动的稳定性。)此外,在该接合状态下,通过使第二滑动构件412d沿着第一滑动构件330d滑动,转动构件322d沿着逆时针方向(如图11b所示)的转动将导致底板442d(以及连接的托架和传感器单元)沿着x轴沿着与第一方向20d相反的第二方向22d平移运动。
48.图12示出了转动构件322e设置有驱动臂340e的实施例,驱动臂340e固定地连接到转动构件322e并且从转动构件322e的外周表面424e延伸。驱动臂340e具有细长形状,其具有沿驱动臂340e纵向延伸的凸轮槽342e。凸轮从动件344e固定地安装在构件440e上。构件440e安装在底板442e上,底板442e通过屈曲件连接到托架。凸轮从动件344e设置在凸轮槽342e内,使得驱动臂340e由于转动构件322e的转动而导致枢转运动引起凸轮槽342e沿x轴方向驱动凸轮从动件344e。在该实施例中,离合器323e设置在驱动装置的输出轴的下端与转动构件322e之间的接合处。离合器323e配置为接合和断开从输出轴的转动至转动构件322e的转动的动力传递。图12示出了由于离合器323e的接合状态以及驱动臂340e、凸轮槽342e和凸轮从动件344e的存在而与转动构件322e接合的构件440e。因此,在该接合状态下,通过使第二滑动构件412e沿第一滑动构件330e滑动,转动构件322e沿逆时针方向(如图12所示)的转动将导致底板442e(以及连接的托架和传感器单元)沿x轴沿第一方向20e平移运动。(为了附图的简单起见,在图12中仅示出了一个第一滑动构件和一个第二滑动构件;然而,可以包括附加的第一滑动构件和第二滑动构件以提供滑动运动的稳定性。)此外,在该接合状态下,通过使第二滑动构件412e沿着第一滑动构件330e滑动,转动构件322e沿着顺时针方向的转动将导致底板442e(以及连接的托架和传感器单元)沿着x轴沿着与第一方向20e相反的第二方向平移运动。
49.本发明的设备有利地提供了一种驱动装置,该驱动装置可以用于使半导体晶片围绕转动轴线转动并且调节传感器单元与转动轴线之间的位置关系。传感器单元与转动轴线之间的位置关系的调节有利地允许该设备用于具有宽直径范围的各种尺寸的半导体晶片。
50.关于图1-图7所示的实施例,设备100可以例如通过将半导体晶片放置在晶片平台304的晶片接收表面306上,通过致动执行器602弯曲屈曲件450和460以使齿441与齿326接合而接合接合装置600来利用,致动驱动装置300以转动输出轴302和转动构件322,以便在沿着x轴朝向转动轴线302a的方向上驱动托架410和传感器单元400,并且利用光学传感器404来检测感测区域406中半导体晶片的存在或不存在。一旦光学传感器404检测到在感测区域406内移动的半导体晶片的边缘的存在,则驱动装置330和/或接合装置600可以被停用以停止托架410和传感器单元400在沿着x轴朝向转动轴线302a的方向上的移动。一旦光学传感器404位于相对于晶片接收表面306上的半导体晶片的期望位置处,则设备100可用于通过使用驱动装置300转动晶片且光学传感器404扫描感测区域406中的晶片来执行半导体晶片的对准以进行检查和/或加工。
51.设备100有利地允许使用用于围绕转动轴线转动半导体晶片的同一驱动装置来调节传感器单元400与转动轴线302之间的相对位置关系。传感器单元400和转动轴线302a之间的相对位置关系的改变允许设备100与各种不同直径的半导体晶片一起使用,从而可以调节传感器单元400和转动轴线302a之间的相对位置关系,使得光学传感器404的感测区域406可以与晶片的外边缘区域对准。因此,可以将传感器单元400和转动轴线302a调节为彼此更靠近以用于较小直径的晶片,并且可以将传感器单元400和转动轴线302a调节为彼此更远离以用于较大直径的晶片。
52.图13示出离合器700的实施例,离合器700配置为使从驱动装置300的输出轴302的转动至转动构件702的转动的动力传递接合和断开,并且使从驱动装置300的输出轴302的转动302至与转动构件702接合的线性构件440的动力传递接合和断开。离合器700可以与配置为齿轮的转动构件702以及配置为齿条的线性构件440一起使用,所述齿轮具有在其上设置有齿的外周表面703,线性构件440具有齿441的线性布置,如图13中的描绘所预期的。替代地,离合器700可以用作本文所示的任何其他实施例的离合器。
53.离合器700包括驱动装置710,驱动装置710配置为驱动轴704,转动构件702沿z方向安装在轴704上。例如,驱动装置710可以是气缸、螺线管等,其在线性方向上驱动轴704并且被动地允许轴704转动,使得当转动构件702与输出轴302接合时,转动构件702可以被驱动装置300驱动转动。输出轴302的下端320具有盘320a,盘320a具有下接合表面321。当驱动装置710被致动以沿z方向驱动轴704时,转动构件302的上接合表面706接触并且因此接合(例如,使用凹槽、齿等摩擦地接合)下接合表面321,并且一旦驱动装置710不再被致动,则驱动轴704将在-z方向上移动,并且转动构件702将与输出轴302断开。要注意的是,为了执行该接合,轴704的移动量可以是小的,并且为了图示的目的在图13中被夸大了。在z方向移动期间,外周表面703上的齿可相对于齿441滑动,并且在其他实施例中,部件可相对于彼此滑动或弯曲(例如,带344c、构件340d、臂构件342d),以便允许这种小的相对运动。
54.为了允许轴704的运动,可以使用轴承720转动地安装轴704。轴承720的外周可以通过安装支架724刚性地安装到驱动装置710,安装支架724如图所示安装到下壁214,或者可以直接刚性地安装到下壁214。轴承720的内周与固定到轴704的滑动件722可滑动地接
合,以便允许轴704沿着z轴线移动并且还允许轴704绕z轴线转动。
55.图14示出了可以利用其实现本发明的实施例的计算机800的实施例。虽然相对于特定设备或设备描绘了计算机800,但是可以想到,图14中的其他装置或装备(例如,网络元件、服务器等)可以部署系统800的所示硬件和组件。计算机800进行编程(例如,经由计算机程序代码或指令)以提供在此描述的功能,并且包括比如总线802的通信机制,用于在计算机系统800的其他内部和外部组件之间传递信息。用于处理信息的一个或多个处理器804与总线802耦接,以对由计算机程序代码指定的信息执行一组操作。
56.计算机800还包括耦接到总线810的存储器806。存储器806(比如随机存取存储器(ram)或其他动态存储装置)存储包括处理器指令的信息。处理器804还使用存储器806来在处理器指令的执行期间存储临时值。计算机系统800还包括只读存储器(rom)808或耦合到总线802的其他静态存储装置,用于存储计算机系统800不改变的静态信息,包括指令。计算机800包括通信接口810,通信接口810允许计算机800与其他装置或装备(例如,网络元件、服务器等)通信。
57.包括用户输入指令的信息从用户接口812提供给总线802以供处理器804使用,用户接口812例如是包含由人类用户操作的字母数字键的键盘、显示装置、指点装置(例如鼠标或轨迹球或光标方向键)。
58.驱动装置814(例如,驱动装置300)可以经由总线802与处理器804通信,以便在其间发送和接收数据、操作指令/命令或其他信息。处理器804可以使用操作指令/命令来控制驱动装置814的运行,以便控制驱动装置814的输出轴(例如输出轴302)的转动(例如,开始、停止、方向(比如顺时针、逆时针)、速度等)。
59.接合装置816(例如,执行器602、离合器323c、离合器323d、离合器323e等)可以经由总线802与处理器804通信,以便在其间发送和接收数据、操作指令/命令或其他信息。处理器804可以使用操作指令/命令来控制接合装置816的操作,以便控制接合装置816的致动。
60.光学传感器818(例如光学传感器404)可以经由总线802与处理器804通信,以便发送和接收数据、操作指令/命令或其间的其他信息。处理器804可以使用操作指令/命令来控制光学传感器818的运行,以便结合驱动装置814和/或接合装置818的运行来控制光学传感器818的运行。
61.例如,如上所述,半导体晶片可以放置在晶片平台的晶片接收表面上,处理器804(使用用户经由用户接口812输入的指令或存储在存储器806中的指令)向接合装置816发送命令来进行致动,处理器804(使用用户经由用户接口812输入的指令或存储在存储器806中的指令)向驱动装置814发送命令以转动输出轴,以便在沿着x轴朝向转动轴线的方向上驱动光学传感器818,并且处理器804(使用由用户经由用户接口812输入的指令或存储在存储器806中的指令)向光学传感器818发送命令以检测半导体晶片的存在或不存在。一旦光学传感器818检测到半导体晶片边缘在感测区域内移动的存在并且将这样的数据发送到处理器804,则处理器804向驱动装置814和/或接合装置816发送命令以停用以停止光学传感器818在沿着x轴朝向转动轴线的方向上的移动。一旦光学传感器818位于相对于晶片接收表面上的半导体晶片的期望位置处,则处理器804可以通过使用驱动装置814转动晶片并且光学传感器818扫描感测区域中的晶片来执行半导体晶片的对准以进行检查和/或加工。
62.应当注意,本文描述和描述的示例性实施例阐述了本发明的优选实施例,并且不意味着以任何方式限制本文的权利要求的范围。根据上述教导,本发明的许多修改和变化是可能的。因此,应当理解,在所附权利要求书的范围内,可以以不同于本文具体描述的方式来实践本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。