技术特征:
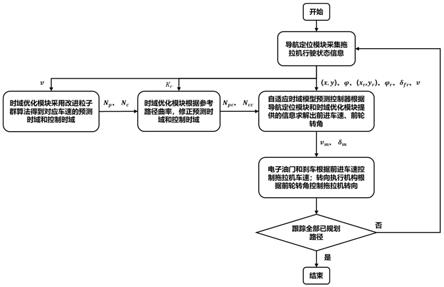
1.一种基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于:时域优化模块根据当前车速v,寻找对应的预测时域n
p
和控制时域n
c
的最优解;时域优化模块再根据参考路径曲率k
r
,对求解的预测时域n
p
和控制时域n
c
进行修正;利用修正后的预测时域n
pc
和控制时域n
cc
更新自适应时域模型预测控制器中的预测时域和控制时域;自适应时域模型预测控制器根据当前位置(x,y)、航向角参考位置(x
r
,y
r
)、参考航向角参考前轮转角δ
fr
、当前车速v、修正后的预测时域n
pc
、修正后的控制时域n
cc
和系统约束优化求解出前进车速v
m
和前轮转角δ
m
;当前车速v达到前进车速v
m
时,加减速结束;实际前轮转角δ达到前轮转角δ
m
时,转向结束;实现拖拉机的路径跟踪控制。2.根据权利要求1所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于,所述对求解的预测时域n
p
和控制时域n
c
进行修正为:n
pc
=round(γ*k
r
n
p
)n
cc
=round(∈*k
r
n
c
)γ≥∈式中,n
pc
和n
cc
分别为修正后的预测时域和控制时域,γ为预测时域的曲率增益系数,∈为控制时域的曲率增益系数。3.根据权利要求1所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于,寻找对应的预测时域n
p
和控制时域n
c
的最优解采用改进粒子群优化算法,改进粒子群优化算法的适应度函数为:n
p
≥n
c
>0式中,α和β为权重系数,是路径跟踪的平均横向误差,δδ
v
是跟踪过程中前轮转角增量的最大值。4.根据权利要求1所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于,所述前进车速v
m
和前轮转角δ
m
为:其中:为t时刻第k次输出的控制量,为t时刻第k-1次输出的控制量,δu(k)为控制增量。5.根据权利要求1所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于,所述参考航向角其中(x
rn
,y
rn
)为下一时刻参考位置。6.根据权利要求5所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特征在于,所述参考前轮转角其中为下一时刻参考航向角,l为农机车轮轴距。7.根据权利要求5所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法,其特
征在于,所述路径曲率其中分别为y
r
对x
r
一阶导数和二阶导数。8.一种实现权利要求1-7任一项所述的基于自适应时域模型预测的拖拉机路径跟踪控制方法的控制系统,其特征在于,包括:导航定位模块,采集拖拉机的当前位置、航向角和当前车速;时域优化模块,对预测时域和控制时域进行修正;自适应时域模型预测控制器,求解前进车速和前轮转角;转角传感器,实时反馈实际前轮转角;动作执行机构,根据前进车速和前轮转角实现拖拉机的路径跟踪。
技术总结
本发明提供了一种基于自适应时域模型预测的拖拉机路径跟踪控制方法及系统,时域优化模块寻找出预测时域和控制时域的最优解,并对求解的预测时域和控制时域进行修正,利用修正后的预测时域和控制时域更新自适应时域模型预测控制器中的预测时域和控制时域;自适应时域模型预测控制器根据当前位置、航向角、参考位置、参考航向角、参考前轮转角、当前车速、修正后的预测时域、修正后的控制时域和系统约束优化求解出前进车速和前轮转角;当前车速达到前进车速时,加减速结束;实际前轮转角达到前轮转角时,转向结束;实现拖拉机的路径跟踪控制。本发明根据车速和规划路径曲率自适应调整预测时域和控制时域,提高的路径跟踪效果和适应性。应性。应性。
技术研发人员:魏新华 胡珉珉 王爱臣 吴抒航 汪岸哲
受保护的技术使用者:江苏大学
技术研发日:2021.11.10
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。