1.本发明涉及一种进出多分裂导线电场的辅助装置及方法。
背景技术:
2.近年,我国输电线路得到迅速发展,电网规模日益扩大,电网运行稳定性要求高,常需等电位作业进行消缺或安装在线监控设备。然而,500kv及以上电压等级线路,由于传统作业工法存在的技术局限性以及等电位作业的安全性要求,使等电位作业面临诸多难题。
3.通常,带电作业相关规程、导则规定:输电线路耐张杆塔进出等电位方式为“跨二短三”法(为尽可能小地占用绝缘空气间隙,手和脚跨过两片绝缘子、短接三片绝缘子),由于实践经验表明,当两串绝缘子间水平距离超过60cm时,作业人员手、脚之间距离过大,无法按照“跨二短三”技术要求的“手脚同步横向移动”,作业风险和劳动强度极大,同时,若缺陷位置处于两档中间位置或直线塔附近时,通过“跨二短三”法进入电场后,作业人员还需经过走线才能到达作业位置,耗时耗力。
4.此外,其他传统带电作业进出电场工法如硬梯法、软梯法(地面软梯法、地线软梯法)、吊篮法等,在适用电压等级、输电线路塔形等方面都存在限制条件,特别是对于同塔多回线路、紧凑型线路,塔头间隙尺寸较小、杆塔布置及环境复杂,无法通过传统工法安全、高效、快速实现等电位,不利于带电作业的安全开展。
5.如今,随着无人机等新型装备的应用,进出电场方式迎来新的发展。利用无人机将绝缘绳抛过导线,完成挂设,再使用电动升降装置从地面到达作业位置,然而,现有无人机结合电动升降装置进出电场方法采用抛绳方式,对于地理环境复杂及双回或多回线路,易出现绝缘绳磨损、脏污,影响作业安全,只适用于超特高压单回线路及同塔多回最下层导线,同时,回收绳索时直接抽绳回收,在复杂线路环境下,易缠绕至其他导线上,存在安全风险。
技术实现要素:
6.本发明所要达到的目的就是提供一种进出多分裂导线电场的辅助装置,能简化快速准确的将绝缘绳挂设在多分裂导线上,减少绝缘绳的磨损。
7.为了解决上述技术问题,本发明是通过以下技术方案实现的:一种进出多分裂导线电场的辅助装置,包括绝缘操作绳、下拉挂钩,以及与分裂导线相适配的本体,所述本体包括两块夹板,以及设置在两块夹板之间的垫块,所述本体上设有调节起吊时本体重心的调节结构,所述夹板的一侧设有向外延伸的圆弧导向部,所述夹板的另一侧设有与下拉挂钩相连的连接块,所述下拉挂钩活动连接在连接块上,所述绝缘操作绳的一端依次穿过圆弧导向部、垫块和连接块后与下拉挂钩相连,所述绝缘操作绳的另一端延伸至地面,所述下拉挂钩依靠绝缘操作绳的拉力而限位在连接块上,所述下拉挂钩在向下的拉力而脱出连接块。
8.优选的,所述调节结构包括调节块和若干个设置在调节块上的调节通孔,相邻两个调节通孔之间的间距均相等,每块夹板上均设有一块调节块,所述调节块设置在靠近圆弧导向部一端的本体上。
9.优选的,所述夹板上设有若干个安装孔,所述调节块通过螺钉固定连接在夹板上。
10.优选的,所述圆弧导向部的一端与夹板为一体式结构,所述圆弧导向部的另一端设有使其相互贴合的连接销。
11.优选的,所述连接块上设有t型孔,所述下拉挂钩的一端设有插销,所述插销活动连接在t型孔内,且所述连接块上设有伸入t型孔内的玻珠螺丝,当插销受拉力向下作用时所述玻珠螺丝收缩在连接块内。
12.优选的,所述下拉挂钩的一端设有固定插销的安装孔,所述下拉挂钩的中部设有与绝缘操作绳相连的连接孔,所述下拉挂钩的另一端设有悬挂槽,所述悬挂槽的一端设有导向斜边。
13.优选的,两块所述夹板之间还设有能增加本体机械强度的销钉。
14.优选的,所述垫块和连接块均为尼龙块,所述夹板为环氧树脂板,且所述环氧树脂板的宽度小于尼龙块的宽度。
15.优选的,所述垫块和连接块上均设有与绝缘操作绳相适配的导向凹槽,所述垫块、夹板和连接块上均设有向上延伸的凸起,所述凸起上设有避免绝缘操作绳脱出导向凹槽的限位钉,且所述限位钉上设有绝缘套。
16.另外,本发明还提供了一种进出多分裂导线电场的方法,包括无人机、起吊挂钩、第一高空悬吊组件和辅助装置,辅助装置采用上述所述的进出多分裂导线电场的辅助装置,所述无人机上设有两个脱钩器,且两个脱钩器关于竖直轴线对称的设置在无人机上,所述脱钩器上设有与起吊挂钩相连的连接绝缘绳,所述第一高空悬吊组件设置在调节结构上,所述下拉挂钩上悬挂有第二高空悬吊组件,所述第二高空悬吊组件上设有拉动下拉挂钩脱出连接部的下拉绝缘绳,所述绝缘操作绳上设有攀爬绳,所述方法依次包括以下步骤:
17.步骤一:将两根绝缘操作绳的一端分别穿过圆弧导向部、垫块和连接块后固定在下拉挂钩上,并将下拉挂钩安装在本体上且拉紧绝缘操作绳使下拉挂钩不脱出,然后将第一高空悬吊组件固定在调节块上;
18.步骤二:将步骤一安装后的本体通过起吊挂钩和连接绝缘绳安装在无人机的脱钩器上;
19.步骤三:将步骤二安装后的无人机进行起飞操作,地面操作人员通过辅助的无人机或摄像机确定作业位置、无人机的飞行状态及装置的空中姿态,并引导无人机飞行至多分裂导线的相应位置,将本体对准挂设位置,贴近多分裂导线使圆弧导向部贴合多分裂导线,向下移动本体,多分裂导线落入本体内,完成挂设,无人机向下调整位置使起吊挂钩脱出第一高空悬吊组件,无人机返回地面;
20.步骤四:将系有下拉绝缘绳的第二高空悬吊组件悬挂步骤三返回的无人机的起吊挂钩上,并将安装后的无人机进行起飞操作,使第二高空悬吊组件挂设在下拉挂钩上,无人机调整位置使起吊挂钩脱出第二高空悬吊组件后无人机返回地面;
21.步骤五:地面作业人员拉动下拉绝缘绳使下拉挂钩向下受力而脱出本体,下拉挂钩带动两根绝缘操作绳下拉,而绝缘操作绳带动攀爬绳穿入辅助装置,其中:一根攀爬绳用
于后备保护用,另一根攀爬绳作为电动升降装置的攀爬用;
22.步骤六:作业人员通过电动升降装置进出电场,完成作业,返回地面;
23.步骤七:将攀爬绳穿过回收套环后通过无人机吊起,地面作业人员通过拉动攀爬绳将回收套环卡接在本体上;
24.步骤八:无人机下挂系有下拉绝缘绳的起吊挂钩起飞,地面作业人员手拉下拉绝缘绳进行控制,将起吊挂钩挂入装置第一高空悬吊组件内,解开定位绝缘绳后无人机吊起本体而返回地面。
25.通过上述进出多分裂导线电场的方法,能有效消除目前无人机结合电动升降装置进出电场方法存在的缺陷和局限,能够通过该方法安全轻松便捷地由地面进入作业点位位置,以便开展带电消缺或安装在线检测装置。
26.综上所述,本发明的优点:通过本体上设置的调节结构,从而有效的调整了整个本体的重心,保持装置整体平衡,保证顺利挂设的功能,同时避免装置重心偏差导致无人机失衡,提高了本体的挂设质量,由于本体上设有绝缘操作绳,因此,绝缘操作绳能随本体同步悬挂在多分裂导线上,由于绝缘操作绳的一端与下拉挂钩相连,因此,挂设时下拉挂钩始终受到绝缘操作绳的拉力作业,下拉挂钩无法脱离本体,而当下拉挂钩受到向下的作用力时能快速的脱出所述连接块,当下拉挂钩脱出连接块时,绝缘操作绳始终固定在下拉挂钩上,因此绝缘操作绳的一端能随下拉挂钩而下降至地面,此时,作用人员能通过绝缘操作绳作为电动升降装置的攀爬绳而进出电场,因此消除了目前无人机结合电动升降装置进出电场方法采用的抛绳法存在的缺陷和局限,使其适用于地理环境复杂地区及同塔双回或多回线路复杂线路,能够进入传统带电作业进出电场方法受限无法或较难进入的紧凑型杆塔等特殊杆塔线路位置,从而消除现有抛绳方式而导致绝缘绳磨损、脏污的问题,提高作业的安全性能,在本体一端设置圆弧导向部,通过圆弧导向部在本体挂设时起到一定的导向和限位功能,进一步提高了本体的挂设效率,连接块的设置,能提高下拉挂钩与连接块的接触面积,提高下拉挂钩的固定质量,最后,将本体设置成夹板和垫块的结构,能有效的降低整个本体的重量。
附图说明
27.下面结合附图对本发明作进一步说明:
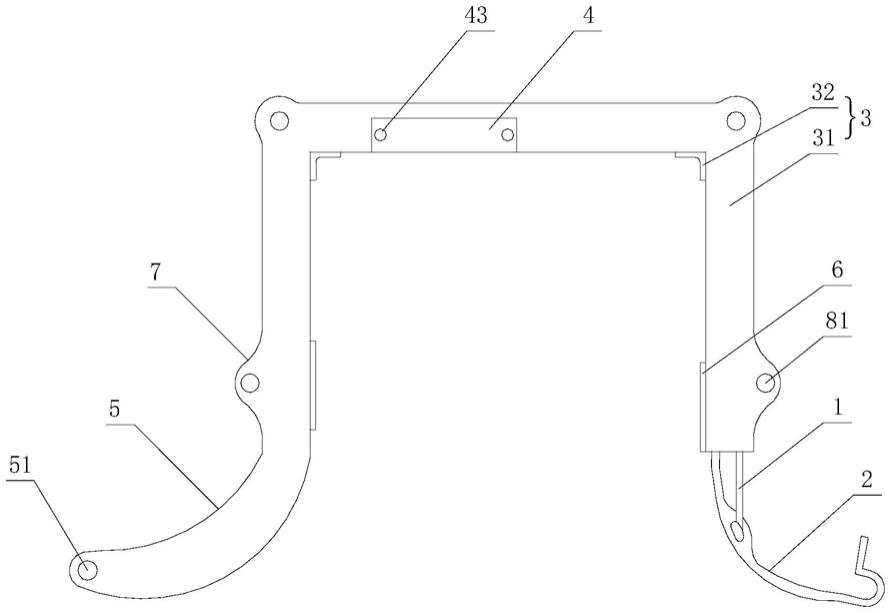
28.图1为本发明一种进出多分裂导线电场的辅助装置的结构示意图;
29.图2为本发明中调节结构在本体上的结构示意图;
30.图3为本发明中连接块在本体上的结构示意图;
31.图4为本发明中连接块的结构示意图;
32.图5为本发明中下拉挂钩的结构示意图;
33.图6为本发明中辅助装置悬挂时的结构示意图;
34.图7为本发明中第二高空悬吊组件悬挂在下拉挂钩上的结构示意图;
35.图8为本发明中下拉挂钩脱离本体的结构示意图;
36.图9为本发明中作业人员进出多分裂导线电场时的结构示意图。
37.附图标记:
38.1绝缘操作绳、10多分裂导线、11攀爬绳、2下拉挂钩、20插销、21安装孔、22连接孔、
23悬挂槽、24导向斜边、3本体、31夹板、32垫块、33销钉、4调节结构、41调节块、42调节通孔、43螺钉、5圆弧导向部、51连接销、6连接块、60t型孔、61玻珠螺丝、7导向凹槽、8凸起、81限位钉、82绝缘套、9无人机、91起吊挂钩、92第一高空悬吊组件、93脱钩器、94连接绝缘绳、95第二高空悬吊组件、96下拉绝缘绳。
具体实施方式
39.实施例一
40.如图1、图2、图3、图4、图5所示,一种进出多分裂导线电场的辅助装置,包括绝缘操作绳1、下拉挂钩2,以及与多分裂导线10相适配的本体3,多分裂导线10一般包括四分裂导线、六分裂导线和八分裂导线,本实施例中以四分裂导线为例,所述本体3包括两块夹板31,以及设置在两块夹板31之间的垫块32,所述本体3上设有调节起吊时本体3重心的调节结构4,所述夹板31的一侧设有向外延伸的圆弧导向部5,所述夹板31的另一侧设有与下拉挂钩2相连的连接块6,所述下拉挂钩2活动连接在连接块6上,所述绝缘操作绳1的一端依次穿过圆弧导向部5、垫块32和连接块6后与下拉挂钩2相连,所述绝缘操作绳1的另一端延伸至地面,所述下拉挂钩2依靠绝缘操作绳1的拉力而限位在连接块6上,所述下拉挂钩2在向下的拉力而脱出连接块6。
41.通过本体3上设置的调节结构4,从而有效的调整了整个本体3的重心,保持装置整体平衡,保证顺利挂设的功能,同时避免装置重心偏差导致无人机9失衡,提高了本体3的挂设质量,由于本体3上设有绝缘操作绳1,因此,绝缘操作绳1能随本体3同步悬挂在多分裂导线10上,由于绝缘操作绳1的一端与下拉挂钩2相连,因此,挂设时下拉挂钩2始终受到绝缘操作绳1的拉力作业,下拉挂钩2无法脱离本体3,而当下拉挂钩2受到向下的作用力时能快速的脱出所述连接块6,当下拉挂钩2脱出连接块6时,绝缘操作绳1始终固定在下拉挂钩2上,因此绝缘操作绳1的一端能随下拉挂钩2而下降至地面,此时,作用人员能通过绝缘操作绳1作为电动升降装置的攀爬绳11而进出电场,因此消除了目前无人机9结合电动升降装置进出电场方法采用的抛绳法存在的缺陷和局限,使其适用于地理环境复杂地区及同塔双回或多回线路复杂线路,能够进入传统带电作业进出电场方法受限无法或较难进入的紧凑型杆塔等特殊杆塔线路位置,从而消除现有抛绳方式而导致绝缘绳磨损、脏污的问题,提高作业的安全性能,在本体一端设置圆弧导向部5,通过圆弧导向部5在本体3挂设时起到一定的导向和限位功能,进一步提高了本体3的挂设效率,连接块6的设置,能提高下拉挂钩2与连接块6的接触面积,提高下拉挂钩2的固定质量,最后,将本体3设置成夹板31和垫块32的结构,能有效的降低整个本体3的重量。
42.所述调节结构4包括调节块41和若干个设置在调节块41上的调节通孔42,相邻两个调节通孔42之间的间距均相等,每块夹板31上均设有一块调节块41,所述调节块41设置在靠近圆弧导向部5一端的本体3上,将调节结构4设置成调节块41和调节通孔42,调节通孔42不仅使其高空悬吊组件安装时具有多个安装位置,而且方便高空悬吊组件的快速安装,结构简单,将调节块41设置在靠近圆弧导向部5一端的本体3上,能保证整个本体的平衡性,所述夹板31上设有若干个安装孔21,所述调节块41通过螺钉43固定连接在夹板31上,能实现调节块41快速的安装在夹板31上,也可根据实际的需求设置调节块41的位置,满足不同型号的分裂导线10,所述圆弧导向部5的一端与夹板31为一体式结构,所述圆弧导向部5的
另一端设有使其相互贴合的连接销51,将圆弧导向部5与夹板31设置成一体式结构,能简化圆弧导向部5与夹板31之间的安装工艺,提高圆弧导向部5与夹板31之间的连接强度,连接销51的设置,能减少圆弧导向部5两端的晃动。
43.所述连接块6上设有t型孔60,所述下拉挂钩2的一端设有插销20,所述插销20活动连接在t型孔60内,且所述连接块6上设有伸入t型孔60内的玻珠螺丝61,当插销20受拉力向下作用时所述玻珠螺丝61收缩在连接块6内,玻珠螺丝61的设置,能方便卡住下拉挂钩2,避免下拉挂钩2意外脱出,玻珠螺丝61为现有技术,玻珠螺丝61的结构本实施例不做详细说明,当下拉挂钩2受到向下的拉力时能使玻珠螺丝61收缩在连接块6内,从而方便下拉挂钩2脱离连接块6,t型孔60和插销20能保证下拉挂钩2的活动的直线度,所述下拉挂钩2的一端设有固定插销20的安装孔21,所述下拉挂钩2的中部设有与绝缘操作绳1相连的连接孔22,所述下拉挂钩2的另一端设有悬挂槽23,所述悬挂槽23的一端设有导向斜边24,能使绝缘操作绳1固定时不受连接块6的干涉,提高了绝缘操作绳1的固定质量,凹槽的设置,能悬挂高空悬吊组件,方便向下拉挂钩2施加一个向下的拉力,保证下拉挂钩2脱离连接块6。
44.两块所述夹板31之间还设有能增加本体3机械强度的销钉33,能提高整个本体3的机械强度,提高整体的使用寿命,所述垫块32和连接块6均为尼龙块,所述夹板31为环氧树脂板,且所述环氧树脂板的宽度小于尼龙块的宽度,能有效的减轻整个辅助装置的重量,其次,将环氧树脂板的宽度不大于尼龙块的宽度,因此,能使辅助装置与多分裂导线接触时,能有效的防止夹板31与多分裂导线接触,保证完全由尼龙块受力,所述垫块32和连接块6上均设有与绝缘操作绳1相适配的导向凹槽7,所述垫块32、夹板31和连接块6上均设有向上延伸的凸起8,所述凸起8上设有避免绝缘操作绳1脱出导向凹槽7的限位钉81,且所述限位钉81上设有绝缘套82,导向凹槽7的设置,能实现绝缘操作绳1与本体3的固定质量,其次,通过限位钉81能有效地的避免绝缘操作绳1的脱出,绝缘套82的设置,能防止绝缘操作绳1的磨损,提高绝缘操作绳1的质量,另外,为了防止绝缘操作绳1的卡顿,可在尼龙块上设置倒角,本实施例中的限位钉81为铝合金限位钉81。
45.实施例二
46.本实施例还公开了一种进出多分裂导线电场的方法,如图6、图7、图8和图9所示,包括无人机9、起吊挂钩91、第一高空悬吊组件92和辅助装置,本实施例中的无人机9采用大疆m600六旋翼无人机,载重量为6kg,辅助装置采用实施例一所述的进出多分裂导线电场的辅助装置,所述无人机9上设有两个脱钩器93,且两个脱钩器93关于竖直轴线对称的设置在无人机9上,两个脱钩器93之间间隔越大,无人机9提供的扭矩越大,控制转向的效果越好,所述脱钩器93上设有与起吊挂钩91相连的连接绝缘绳94,在无人机9上设置与连接绝缘绳94的脱钩器93,当无人机9在空中失控或其他意外情况发生时,可立即打开脱钩器93,使连接绝缘绳94脱出,随即稳住飞机,避免进一步意外发生,而且脱钩器93设置有两个,可以控制吊装装置的转向,且设置成对称设置在无人机9上,能保持无人机9重心的平衡,整个吊装过程无需人员登杆作业,降低高空作业风险,减员增效明显,也可适用在水塘或复杂地形地区,拓展了高空作业的适用场景,所述第一高空悬吊组件92设置在调节结构4上,所述下拉挂钩2上悬挂有第二高空悬吊组件95,所述第二高空悬吊组件上设有拉动下拉挂钩2脱出连接部的下拉绝缘绳96,本实施例中的第一高空悬吊组件和第二高空悬吊组件均采用圆环结构,且所述圆环的直径d为20cm~60cm,小于20cm时,受到空中风力舞动及无人机9定位摆动
的影响,起吊挂钩91难以进入高空悬吊组件,大于60cm时,高空悬吊组件对装置重心影响过大,且无人机9转动时更易使高空悬吊组件弯曲,难以控制装置,所述绝缘操作绳1上设有攀爬绳11,也可直接将绝缘操作绳1用于作业人员的攀爬,本实施例中,优先采用在绝缘操作绳1固定攀爬绳11,且攀爬绳11的直径大于绝缘操作绳1的直径,这样操作能有效减少了整个辅助装置在起吊时的重量,保证起吊的安全性能,且绝缘操作绳1和攀爬绳11之间设有冷缩管连接,连接可靠,连接部位没有明显凸起8,不易卡住,所述方法依次包括以下步骤:
47.步骤一:将两根绝缘操作绳1的一端分别穿过圆弧导向部5、垫块32和连接块6后固定在下拉挂钩2上,并将下拉挂钩2安装在本体上且拉紧绝缘操作绳1使下拉挂钩2不脱出,然后将第一高空悬吊组件92固定在调节块41上;
48.步骤二:将步骤一安装后的本体3通过起吊挂钩91和连接绝缘绳94安装在无人机9的脱钩器93上;
49.步骤三:将步骤二安装后的无人机9进行起飞操作,地面操作人员通过辅助的无人机9或摄像机确定作业位置、无人机9的飞行状态及装置的空中姿态,并引导无人机9飞行至多分裂导线10的相应位置,将本体3对准挂设位置,贴近多分裂导线10使圆弧导向部5贴合多分裂导线10,向下移动本体3,导线10落入本体3内,完成挂设,无人机9向下调整位置使起吊挂钩91脱出第一高空悬吊组件92,无人机9返回地面;
50.步骤四:将系有下拉绝缘绳96的第二高空悬吊组件95悬挂步骤三返回的无人机9的起吊挂钩91上,并将安装后的无人机9进行起飞操作,使第二高空悬吊组件95挂设在下拉挂钩2上,无人机9调整位置使起吊挂钩91脱出第二高空悬吊组件95后无人机9返回地面;
51.步骤五:地面作业人员拉动下拉绝缘绳96使下拉挂钩2向下受力而脱出本体3,下拉挂钩2带动两根绝缘操作绳1下拉,而绝缘操作绳1带动攀爬绳11穿入辅助装置,其中:一根攀爬绳11用于后备保护用,另一根攀爬绳11作为电动升降装置的攀爬用;
52.步骤六:作业人员通过电动升降装置进出电场,完成作业,返回地面;
53.步骤七:将攀爬绳11穿过回收套环后通过无人机9吊起,地面作业人员通过拉动攀爬绳11将回收套环卡接在本体上;
54.步骤八:无人机9下挂系有下拉绝缘绳96的起吊挂钩91起飞,地面作业人员手拉下拉绝缘绳96进行控制,将起吊挂钩91挂入装置第一高空悬吊组件92内,解开定位绝缘绳后无人机9吊起本体而返回地面。
55.通过上述进出多分裂导线电场的方法,能有效消除目前无人机结合电动升降装置进出电场方法存在的缺陷和局限,能够通过该方法安全轻松便捷地由地面进入作业点位位置,以便开展带电消缺或安装在线检测装置。
56.以上所述仅为本发明的具体实施例,但本发明的技术特征并不局限于此,任何本领域的技术人员在本发明的领域内,所作的变化或修饰皆涵盖在本发明的专利范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。