1.本发明涉及对电动机进行驱动的电动机驱动系统及电动机驱动装置。
背景技术:
2.电动机驱动装置具有向电动机供给交流电力的逆变器电路。逆变器电路构成为具有大于或等于2个由上桥臂开关元件和下桥臂开关元件串联连接而成的支路(leg)。上桥臂是指高电位侧,下桥臂是指低电位侧。
3.为了对逆变器电路所具有的各开关元件进行控制,需要用于向各开关元件施加栅极驱动电压的栅极驱动电路。另外,为了使栅极驱动电路进行动作,需要栅极电源。就栅极驱动电路的电源方式而言,存在针对用于对逆变器电路的上桥臂开关元件进行驱动的栅极电源电路而单独地连接了栅极电源的单独电源方式、和针对用于对上桥臂开关元件进行驱动的栅极电源电路而连接了共用的栅极电源的共用电源方式。
4.与共用电源方式相比,单独电源方式需要准备更多的栅极电源,因而需要高成本。就共用电源方式而言,需要在对上桥臂开关元件进行驱动时预先使所对应的下桥臂开关元件进行动作,完成栅极电源电路所具有的电荷泵电路的充电。电荷泵电路的充电需要某种程度的时间。因此,从发出驱动指令至实际进行接通(on)动作或断开(off)动作的时间在上桥臂开关元件与下桥臂开关元件之间存在波动。另外,电荷泵电路的充电时间也存在波动,因而在上桥臂开关元件之间,接通动作或断开动作的时间也产生波动。
5.就下述专利文献1的电力转换装置而言,针对共用电源方式的栅极驱动电路,为了加速电动机动作的开始,通过在逆变器停止的期间(逆变器停止期间)使下桥臂开关元件接通,从而维持上桥臂栅极电源(上桥臂开关元件的栅极电源)。由此,在下述专利文献1的电力转换装置中,在逆变器停止期间之后,使用上桥臂栅极电源而即刻开始电动机动作。
6.另外,如果对由逆变器电路驱动的电动机大致进行区分,则存在转子绕旋转轴进行旋转的旋转式电动机和没有旋转轴的进行直线运动的线性电动机。通常的线性电动机的结构是在地上侧配置作为固定部的磁铁对、在可动部侧配置线圈的方式。在该方式中,可动部的线圈由从电动机驱动装置供给的电流驱动。
7.然而,在线圈位于可动部的方式中,需要使得用于向可动部施加电源电压的电源电缆追随可动部的线圈的动作而并行移动的机制。或者,需要通过增设非接触供电装置等而向可动部施加电源电压的机制。在追随可动部的线圈的动作而使电源电缆并行移动的情况下,在环绕这样的运转路径的情况下,存在诸如电缆长度、电缆扭曲这样的限制。另外,在增设非接触供电装置的情况下,存在需要大量的费用的课题。
8.针对上述课题,还存在设为与通常的线性电动机相反的结构的方式,即,将线圈作为固定部而配置于地上侧、将磁铁配置于可动部的方式。该方式被称为“移动磁铁方式”或“移动磁铁控制”等。在移动磁铁方式的情况下,由于可动部是磁铁,所以不需要向可动部的电源供给。因此,不会产生在将线圈配置于可动部的方式的线性电动机中成为了课题的诸如电缆长度、电缆扭曲这样的限制。另外,在该移动磁铁方式的情况下,也不需要增设非接
触供电装置。
9.专利文献1:日本特开平9-219976号公报
技术实现要素:
10.但是,移动磁铁方式也存在课题。例如,如果可动部的动作范围即行程变得大于或等于某种程度,则通过1组线圈和1台电动机驱动装置无法确保行程,需要准备多套线圈及电动机驱动装置的组合。并且,在对准备的多个线圈中的作为励磁对象的线圈进行切换时,需要确保控制的连续性、平滑地进行线圈间的切换的技术。
11.在上述专利文献1的共用电源方式的栅极驱动电路的情况下,如果使针对下桥臂开关元件的充电脉冲长时间接通,则与使下桥臂开关元件接通(on)的时间相对应地产生动态制动的作用。动态制动是使旋转能量进行热消耗而使电动机停止的制动。因此,在上述专利文献1的共用电源方式的栅极驱动电路中,无法平滑地进行移动磁铁方式下的多个线圈间的切换。
12.本发明就是鉴于上述情况而提出的,其目的在于得到在对作为励磁对象的线圈进行切换时,能够平滑地进行线圈间的切换的电动机驱动系统。
13.为了解决上述课题,达成目的,本发明涉及的电动机驱动系统具有第1及第2电动机驱动装置、上级控制装置。第1电动机驱动装置具有第1控制部及第1逆变器电路,该第1电动机驱动装置基于第1控制部所生成的第1驱动指令而对第1电动机进行驱动。第2电动机驱动装置具有第2控制部及第2逆变器电路,该第2电动机驱动装置基于第2控制部所生成的第2驱动指令而对第2电动机进行驱动。上级控制装置生成电动机控制有效指令,基于电动机控制有效指令而对第1及第2电动机驱动装置的动作进行控制。第1电动机由配置于固定部的第1线圈和配置于以能够向第1方向的正侧及负侧移动的方式构成的可动部的多个磁铁对构成。第2电动机由多个磁铁对和配置于固定部并在第1方向的正侧与第1线圈相邻的第2线圈构成。第1及第2线圈伴随可动部的移动而被依次切换为在第1方向的正侧或负侧相邻的线圈。上级控制装置向第1及第2电动机驱动装置的某一者输出电动机控制有效指令。第1逆变器电路的第1上桥臂开关元件由第1栅极驱动电路进行驱动,该第1栅极驱动电路,构成为,对第1上桥臂开关元件进行驱动的栅极电源电路使用共用的电源。第2逆变器电路的第2上桥臂开关元件由第2栅极驱动电路进行驱动,该第2栅极驱动电路构成为,对第2上桥臂开关元件进行驱动的栅极电源电路使用共用的电源。第1控制部在未接收到电动机控制有效指令的期间,停止第1驱动指令向第1上桥臂开关元件的输出,并且,针对第1逆变器电路的第1下桥臂开关元件,在能够维持第1上桥臂开关元件的驱动所需的第1上桥臂栅极电源的第1定时继续进行通断,在接收到电动机控制有效指令时输出第1驱动指令。第2控制部在未接收到电动机控制有效指令的期间,停止第2驱动指令向第2上桥臂开关元件的输出,并且,针对第2逆变器电路的第2下桥臂开关元件,在能够维持第2上桥臂开关元件的驱动所需的第2上桥臂栅极电源的第2定时继续进行通断,在接收到电动机控制有效指令时输出第2驱动指令。
14.发明的效果
15.根据本发明涉及的电动机驱动系统,取得在对作为励磁对象的线圈进行切换时,能够平滑地进行线圈间的切换的效果。
附图说明
16.图1是表示实施方式1涉及的电动机驱动系统所使用的电动机驱动装置的结构的框图。
17.图2是表示图1所示的逆变器电路的详细结构的电路图。
18.图3是用于实施方式1中的栅极驱动电路的结构的说明的电路图。
19.图4是表示实施方式1涉及的电动机驱动系统的结构例的图,该电动机驱动系统使用了图1所示的电动机驱动装置。
20.图5是表示在图4中即将从第1线圈切换至第2线圈前的动作状态的图。
21.图6是表示在图4中刚刚切换至第2线圈之后的动作状态的图。
22.图7是用于图4所示的电动机驱动系统的动作说明的时序图。
23.图8是用于图3所示的上桥臂栅极电源电压的波形与下桥臂开关元件的栅极信号之间的关系的说明的图。
24.图9是用于实施方式2涉及的电动机驱动系统的动作说明的时序图。
具体实施方式
25.以下,基于附图,对本发明的实施方式涉及的电动机驱动系统及电动机驱动装置详细进行说明。此外,本发明不限定于以下的实施方式。
26.实施方式1.
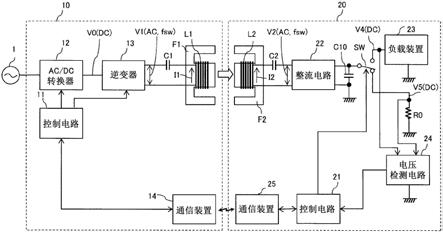
27.图1是表示实施方式1涉及的电动机驱动系统所使用的电动机驱动装置200的结构的框图。电动机驱动装置200如图1所示,是使用从交流电源26供给的电力而对负载即电动机150进行驱动的驱动装置。电动机驱动装置200具有转换器电路18、逆变器电路20、平滑电容器22、控制部23和栅极驱动电路24。
28.转换器电路18对从交流电源26施加的交流电压进行整流而转换为直流电压。转换器电路18的一个例子是由二极管桥构成的全波整流电路。在转换器电路18的输出端连接逆变器电路20。转换器电路18与逆变器电路20通过高电位侧的直流母线27和低电位侧的直流母线28而连接。在直流母线27与直流母线28之间配置平滑电容器22。直流母线27与直流母线28之间的电压被称为“母线电压”。平滑电容器22具有使母线电压平滑而使母线电压稳定化的作用。
29.逆变器电路20将由平滑电容器22平滑后的直流电压转换为交流电压而施加于电动机150。电动机150由从逆变器电路20供给的交流电力驱动。在电动机150设置有位置传感器130。位置传感器130对电动机150中的未图示的转子的旋转位置进行检测。由位置传感器130检测出的位置传感器信号132被输入至控制部23。
30.控制部23具有处理器23a和存储器23b。处理器23a基于位置传感器信号132而生成用于对逆变器电路20的开关元件21进行控制的驱动指令30。栅极驱动电路24基于驱动指令30而产生驱动电压32。驱动电压32是用于对逆变器电路20的开关元件21进行驱动的栅极驱动电压。
31.处理器23a也可以是被称为微处理器、微机、微型计算机、cpu(central processing unit)或dsp(digital signal processor)的处理器。
32.在存储器23b中保存由处理器23a读取的程序、由处理器23a参照的参数、通过处理
器23a的处理而得到的数据等。存储器23b也被用作处理器23a进行运算处理时的工作区域。存储器23b通常是诸如ram(random access memory)、闪存、eprom(erasable programmable rom)、eeprom(注册商标)(electrically eprom)这样的非易失性或易失性半导体存储器。
33.此外,在图1中,将交流电源26设为三相电源,但不限定于此。交流电源26也可以是单相电源。在交流电源26是单相电源的情况下,转换器电路18设为与单相电源相匹配的结构。电动机150的一个例子是三相电动机。在电动机150是三相电动机的情况下,逆变器电路20也成为三相的电路结构。
34.图2是表示图1所示的逆变器电路20的详细结构的电路图。逆变器电路20如图2所示具有支路21a、支路21b及支路21c。支路21a、支路21b及支路21c在直流母线27与直流母线28之间彼此并联连接。支路21a是由u相的上桥臂开关元件21up与下桥臂开关元件21un串联连接而成的电路部。支路21b是由v相的上桥臂开关元件21vp与下桥臂开关元件21vn串联连接而成的电路部。支路21c是由w相的上桥臂开关元件21wp与下桥臂开关元件21wn串联连接而成的电路部。
35.此外,在图2中,例示了上桥臂开关元件21up、21vp、21wp及下桥臂开关元件21un、21vn、21wn是金属氧化物半导体场效应晶体管(metal oxide semiconductor field effect transistor:mosfet)的情况,但不限定于此。也可以取代mosfet而使用绝缘栅型双极晶体管(insulated gate bipolar transistor:igbt)。
36.另外,各开关元件也可以具有反向并联连接的二极管。在开关元件是mosfet的情况下,也可以使用mosfet自身在内部具有的寄生二极管。寄生二极管也被称为体二极管。
37.图3是用于实施方式1中的栅极驱动电路24的结构的说明的电路图。在图3中,示出了在图1所示的处理器23a与逆变器电路20之间配置的栅极驱动电路24的详细的连接关系。实施方式1中的栅极驱动电路24是共用电源方式的栅极驱动电路。
38.实施方式1中的栅极驱动电路24如图3所示具有栅极电源电路24a、24b、24c、24d。栅极电源电路24a、24b、24c是上桥臂开关元件用的栅极电源电路。栅极电源电路24a具有电阻241、作为信号传输单元及绝缘单元的光电耦合器242、用于维持各上桥臂栅极电源的电荷泵电路、直流电源243。电荷泵电路具有整流二极管246、电阻245、齐纳二极管247及电容器248。栅极电源电路24b、24c也与栅极电源电路24a同样地构成。
39.另外,栅极电源电路24d是下桥臂开关元件用的栅极电源电路。就针对每个下桥臂开关元件而各自具有电阻241及光电耦合器242的结构而言,除了不存在电荷泵电路以外,与上桥臂开关元件用的栅极电源电路24a、24b、24c是相同的。
40.另外,图3所示的栅极电源电路24d是下桥臂栅极电源被共用化而具有1个直流电源244的结构。这是因为,在逆变器电路20中,下桥臂开关元件的源极端子彼此连接而为同电位,能够将该电位设为栅极电源电路24d的基准电位。因此,栅极驱动电路是单独电源方式还是共用电源方式是由上桥臂栅极电源是否被共用化决定的。此外,当然也可以不使下桥臂栅极电源共用化而是使用3个直流电源来构成。
41.如果从处理器23a发出驱动指令30,则光电耦合器242通过驱动指令30而导通。例如,在驱动指令30是使u相的上桥臂开关元件21up接通的驱动指令的情况下,栅极电源电路24a的光电耦合器242导通,向上桥臂开关元件21up施加驱动电压32。由此,上桥臂开关元件21up接通。其它开关元件也被同样地驱动。另外,如果光电耦合器242的导通被切断,则开关
元件断开。
42.接下来,对在上面说明的电动机驱动装置200的应用例进行说明。图4是表示实施方式1涉及的电动机驱动系统300的结构例的图,该电动机驱动系统300使用了图1所示的电动机驱动装置200。图4所示的电动机驱动系统300的驱动对象是移动磁铁方式的线性电动机。在移动磁铁方式的线性电动机中,在构成于地上侧的固定部配置多个线圈,在可动部配置多个磁铁对。各线圈具有通过星形接线等而接线的3个线圈部件。
43.在图4中,作为多个线圈的例示,在地上侧沿第1方向即x1的正方向依次配置有3个线圈100a、100b、100c。另外,作为多个磁铁对的例示,在构成可动部的可动转向架124搭载有3个磁铁对120。由线圈100a、100b、100c和搭载于可动转向架124的3个磁铁对120构成线性电动机。
44.磁铁对120的磁极方向是第2方向即y1的方向。y1是与x1正交的方向。3个磁铁对120被连结起来,相邻的磁铁对彼此的磁极的ns被180
°
反转。由此,在可动转向架124沿第1方向移动时,从线圈侧来观察的磁铁对120的磁极呈n极与s极交替出现的情况。
45.将1个线圈的x1的方向的长度设为l1,将3个磁铁对120整体的x1的方向的长度设为l2。在图4的例子的情况下,在上述l1、l2之间存在l1<l2<2
×
l1的关系。l1<l2<2
×
l1的关系意味着除了由多个线圈构成的线圈组的两端以外,成为3个磁铁对120横跨2个线圈的状态,并且不存在横跨大于或等于3个线圈的状态。此外,根据系统的规格,也可能容许横跨大于或等于3个线圈这一状态。另外,根据系统的规格,有时l1>l2。
46.在地上侧载置有电动机驱动装置200a、200b、200c。电动机驱动装置200a、200b、200c各自与线圈100a、100b、100c各自1对1地连接。线圈100a通过电动机驱动装置200a所输出的电流而被励磁。由此,线圈100a成为电磁铁,与配置于可动转向架124的磁铁对120之间产生吸力或斥力,可动转向架124沿x1的正方向行进。
47.另外,在线圈100a、100b、100c各自分别配置有传感器130a、130b、130c。传感器130a、130b、130c的一个例子是光学传感器,光学传感器的具体例是条形码读取器。作为位置标识符的条形码123以能够由条形码读取器即传感器130a、130b、130c读取的方式而粘贴于可动转向架124。此外,在图4中,线圈100a、100b、100c仅示出了一部分,线圈的数量由系统的规模决定。另外,在图4中,使各线圈无间隙地配置,但各线圈也可以隔开间隙地配置。另外,传感器130a、130b、130c也可以是磁传感器。在这种情况下,也可以不在可动转向架124设置条形码123。
48.电动机驱动装置200a通过通信线106而与电动机驱动装置200b连接,电动机驱动装置200b通过通信线106而与电动机驱动装置200c连接。即,电动机驱动装置200a、200b、200c通过通信线106而串联地连接。电动机驱动装置200a还通过通信线106与上级控制装置即控制器125连接。
49.控制器125生成控制指令140。控制指令140通过通信线106而被传输至电动机驱动装置200a。控制指令140包含运转指令、位置指令、速度指令及电动机控制有效指令。运转指令是用于决定使可动部即可动转向架124进行动作还是停止的指令值或指令信号。位置指令是用于指示可动转向架124的位置的指令值或指令信号。速度指令是用于指示可动转向架124的速度的指令值或指令信号。关于电动机控制有效指令,会在后面叙述。
50.电动机驱动装置200a将接收到的控制指令140传输至电动机驱动装置200b。电动
机驱动装置200b将接收到的控制指令140传输至电动机驱动装置200c。此外,图4的连接例是一个例子,不限定于该例子。只要由控制器125生成的控制指令140能够传输至电动机驱动装置200a、200b、200c,则什么样的连接方式均可。另外,在图4中,是有线地进行连接,但也可以无线地进行连接。
51.接下来,除图4以外,还参照图5至图7的附图对图4所示的电动机驱动系统300的动作进行说明。图5是表示在图4中电动机控制被设为有效的线圈即将从第1线圈切换为第2线圈前的动作状态的图。图6是表示在图4中电动机控制被设为有效的线圈刚刚切换为第2线圈之后的动作状态的图。图7是用于图4所示的电动机驱动系统300的动作说明的时序图。如果对附图进行补充说明,则在图4中示出了电动机控制被设为有效的线圈是第1线圈的情况下的动作的情况。另外,在图7中示出了电动机控制被设为有效的线圈从第1线圈切换为第2线圈时的动作。
52.在图7中,首先,在时刻t1,通过控制器125而向电动机驱动装置200a输出位置指令(参照图7(d)),向电动机驱动装置200a输出电动机控制有效指令(参照图7(f))。在图7(f)、(g)中,将接收到电动机控制有效指令、电动机控制为有效的状态由“on”表示,将未接收到电动机控制有效指令、电动机控制并非有效的状态由“off”表示。电动机驱动装置200a的动作状态被从off切换为on,开始动作。在电动机驱动装置200a为on状态时,电动机驱动装置200a对线圈100a进行励磁,因而,可动转向架124受到驱动而移动,可动转向架124的位置发生变化(参照图7(a))。图7(b)示出了由传感器130a检测的可动转向架124的位置信息。位置信息经由电动机驱动装置200a而被传输至控制器125。此外,在图7中,在向电动机驱动装置200a输出位置指令的同一时刻t1,可动转向架124的位置发生变化,但实际上,由于控制的时滞,可动转向架124的位置的变化比位置指令的变化产生得晚。
53.另一方面,在时刻t1时,没有向电动机驱动装置200b输出电动机控制有效指令,电动机驱动装置200b的动作状态保持为off(参照图7(g))。这里,对电动机控制有效指令进行补充说明。如前所述,电动机控制有效指令是从控制器125输出的控制指令140之一。控制器125在输出电动机控制有效指令时,指定将电动机控制设为有效的1个电动机驱动装置。此外,不会针对1台可动转向架124而同时指定多个电动机驱动装置。
54.返回图7的说明,针对电动机驱动装置200a的位置指令超过时刻t3而持续至时刻t12为止,针对电动机驱动装置200b的位置指令从紧靠在时刻t3之前的时刻t11起开始。即,针对电动机驱动装置200a、200b的位置指令在时刻t11、t12之间重叠。另一方面,针对电动机驱动装置200a的电动机控制有效指令与针对电动机驱动装置200b的电动机控制有效指令以不重叠的方式而在时刻t3切换(参照图7(f)、(g))。图5示出时刻t11的状态,图6示出时刻t12的状态。
55.在图5及图6的情况下,传感器130a、130b这两者位于可读取条形码123的位置关系,因而,传感器130a、130b这两者检测出位置信息(参照图7(b)、(c))。此外,尽管未图示,但时刻t2是条形码123的右端到达传感器130b的时刻,时刻t4是条形码123的左端离开传感器130a的时刻。
56.在移动磁铁方式的线性电动机的情况下,搭载于可动转向架124的磁铁对120长度有限,如果仅有1个线圈,则无法使可动转向架124在整个区域进行动作。因此,如图5及图6所示,可动转向架124以某种程度行进,在第2线圈即线圈100b与磁铁对120相对的长度变得
比第1线圈即线圈100a与磁铁对120相对的长度长的定时(timing),对电动机控制的有效进行切换。从线圈100b向线圈100c的切换也能够同样地进行。在从线圈100b向线圈100c进行切换的情况下,线圈100b成为第1线圈,线圈100c成为第2线圈。另外,在将对第1线圈进行励磁的电动机驱动装置设为第1电动机驱动装置,将对第2线圈进行励磁的电动机驱动装置设为第2电动机驱动装置时,对线圈100b进行驱动的电动机驱动装置200b成为第1电动机驱动装置,对线圈100c进行驱动的电动机驱动装置200c成为第2电动机驱动装置。
57.这里,对第1电动机驱动装置是电动机驱动装置200a、第2电动机驱动装置是电动机驱动装置200b的情况下的电动机驱动装置200a、200b所具有的结构要素的关系进行说明。电动机驱动装置200a的控制部23是第1控制部,电动机驱动装置200b的控制部23是第2控制部。在这种情况下,电动机驱动装置200a所生成的驱动指令30是第1驱动指令,电动机驱动装置200b所生成的驱动指令30是第2驱动指令。另外,电动机驱动装置200a的逆变器电路20是第1逆变器电路,电动机驱动装置200b的逆变器电路20是第2逆变器电路。另外,电动机驱动装置200a的上桥臂开关元件21up、21vp、21wp是第1上桥臂开关元件,电动机驱动装置200b的上桥臂开关元件21up、21vp、21wp是第2上桥臂开关元件。另外,电动机驱动装置200a的下桥臂开关元件21un、21vn、21wn是第1下桥臂开关元件,电动机驱动装置200b的下桥臂开关元件21un、21vn、21wn是第2下桥臂开关元件。另外,电动机驱动装置200a的栅极驱动电路24是第1栅极驱动电路,电动机驱动装置200b的栅极驱动电路24是第2栅极驱动电路。另外,电动机驱动装置200a的上桥臂栅极电源是第1上桥臂栅极电源,电动机驱动装置200b的上桥臂栅极电源是第2上桥臂栅极电源。
58.此外,在上述说明中,说明了进行动作的可动转向架124的台数是1台的情况,但不限定于此。进行动作的可动转向架124的台数也可以是多个。在进行动作的可动转向架124的台数是多个的情况下,针对可动转向架124各自而指定第1电动机驱动装置。另外,针对每台可动转向架124而进行上述的线圈及电动机驱动装置的切换。
59.另外,在图4至图6的例子中,说明了可动转向架124沿x1的正方向行进的情况,但可动转向架124也能够沿x1的负方向行进。在可动转向架124沿x1的负方向行进的情况下,进行从线圈100b向线圈100a的切换。在这种情况下,第1线圈被从线圈100c切换为线圈100b,第2线圈被从线圈100b切换为线圈100a。另外,第1电动机驱动装置被从电动机驱动装置200c切换为电动机驱动装置200b,第2电动机驱动装置被从电动机驱动装置200b切换为电动机驱动装置200a。
60.另外,在图5及图6的例子中,说明了基于与磁铁对120相对的长度的长短而对电动机控制的有效进行切换的例子,但不限定于该例子。线圈切换的方法存在各种方法,也可以使用其它方法。举出一个例子,想到基于位置传感器信号132的检测电平而对电动机控制的有效进行切换的方法。
61.在具有使用电荷泵电路而构成的栅极电源的栅极驱动电路24的情况下,即使在不需要电动机控制的情况下,为了确保上桥臂栅极电源也需要继续进行下桥臂开关元件的通断。在继续进行下桥臂开关元件的通断的情况下,通过动态制动而流过制动电流,在电动机产生制动力而使电动机减速。
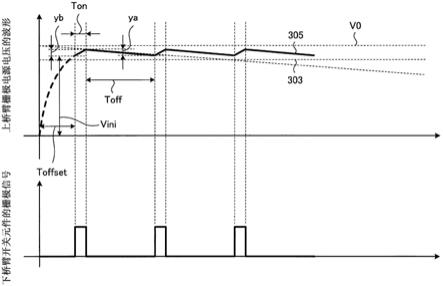
62.这里,对图3所示的栅极驱动电路24的电荷泵电路中的上桥臂栅极电源电压的波形与下桥臂开关元件的栅极信号(栅极驱动信号)之间的关系进行说明。图8是用于图3所示
的上桥臂栅极电源电压的波形与下桥臂开关元件的栅极信号之间的关系的说明的图。图8所示的动作在电动机控制有效指令为off的期间进行。例如,针对电动机驱动装置200a,在图7的(f)所示的电动机控制有效指令为off的期间(时刻t3之后),如图8所示,执行使下桥臂开关元件的栅极信号仅以特定的时间接通的动作。
63.图8所示的时间ton是下桥臂开关元件的接通时间,时间toff是下桥臂开关元件的断开时间。上桥臂栅极电源电压305是光电耦合器242的输出侧的电源电压。即,上桥臂栅极电源电压305等于在将光电耦合器242的电压输入侧和整流二极管246的阴极侧连接的连接点与将光电耦合器242的电压输出侧和齐纳二极管247的阳极侧连接的连接点之间施加的电压。
64.所需电源电压303是上桥臂开关元件的驱动所需的上桥臂栅极电源的电源电压。使下桥臂开关元件进行动作而完成电荷泵电路的充电时的电源电压设为比上桥臂开关元件的驱动所需的电源电压大的电源电压。本实施方式的电动机驱动装置200对上桥臂栅极电源电压305进行维持,以使其不低于所需电源电压303。
65.电压下降量ya是在使下桥臂开关元件断开的期间上桥臂栅极电源电压305下降的量。电压上升量yb是在使下桥臂开关元件接通的期间上桥臂栅极电源电压305上升的量。
66.栅极供给电源电压v0是由直流电源243向栅极电源电路24a供给的电源电压。电压vini是向上桥臂栅极电源充电完成后的电压。电压vini是比所需电源电压303大的电压值。时间toffset是使上桥臂栅极电源电压305从0v上升至电压上升量yb的下限电压值为止所需的时间。电压上升量yb的下限电压值是将从第1电压值起至第2电压值为止的电压上升量设为电压上升量yb的情况下的第1电压值。上桥臂栅极电源电压305在时间toffset的期间从0v上升至第1电压值,然后,在时间ton的期间以电压上升量yb的量上升而成为第2电压值。
67.就上桥臂栅极电源电压305而言,在时间toff的期间,上桥臂栅极电源电压305下降。电动机驱动装置200通过在上桥臂栅极电源电压305成为电压vini的定时使下桥臂开关元件接通而使上桥臂栅极电源电压305上升。电动机驱动装置200通过反复进行这些处理而对上桥臂栅极电源电压305进行维持,以使得上桥臂栅极电源电压305不低于所需电源电压303。
68.例如,在电动机驱动装置200a是第1电动机驱动装置的情况下,第1控制部在未接收到电动机控制有效指令的期间,停止第1驱动指令向第1上桥臂开关元件的输出,并且针对第1逆变器电路的第1下桥臂开关元件,在能够维持第1上桥臂开关元件的驱动所需的第1上桥臂栅极电源的第1定时继续进行通断,在接收到电动机控制有效指令时输出第1驱动指令。另外,在电动机驱动装置200b是第2电动机驱动装置的情况下,第2控制部在未接收到电动机控制有效指令的期间,停止第2驱动指令向第2上桥臂开关元件的输出,并且针对第2逆变器电路的第2下桥臂开关元件,在能够维持第2上桥臂开关元件的驱动所需的第2上桥臂栅极电源的第2定时继续进行通断,在接收到电动机控制有效指令时输出第2驱动指令。
69.第1定时的通断中的下桥臂开关元件的接通时间的例子是能够维持第1上桥臂栅极电源,并且下桥臂开关元件的接通时间成为最小值的接通时间。第2定时的通断中的下桥臂开关元件的接通时间的例子是能够维持第2上桥臂栅极电源,并且下桥臂开关元件的接通时间成为最小值的接通时间。
70.为了电荷泵电路而使用的时间ton(下桥臂开关元件的接通时间)成为最小值是如下情况,即,上桥臂栅极电源电压305大于或等于所需电源电压303,并且电压下降量ya与电压上升量yb相等。电压下降量ya由下式(1)表示。另外,电压上升量yb由下式(2)表示。这样,电压下降量ya与电压上升量yb相等的情况下的下桥臂开关元件的接通时间成为最小的接通时间(最小的时间ton)。最小的接通时间是上桥臂栅极电源电压305大于或等于所需电源电压303的接通时间中的最小的接通时间。在第1电动机驱动装置是电动机驱动装置200a、第2电动机驱动装置是电动机驱动装置200b的情况下,电动机驱动装置200a的最小的接通时间是第1最小接通时间,电动机驱动装置200b的最小的接通时间是第2最小接通时间。在以下的说明中,有时将下桥臂开关元件的最小的接通时间称为下桥臂最小接通时间。
71.【式1】
72.ya=i/c
×
toff
…
(1)
73.【式2】
74.yb=v0
×
exp(-(ton toffset)/rc)-vini
…
(2)
75.式(2)所示的电压上升量yb基于由电荷泵电路的电阻245、电容器248和直流电源243构成的通常的cr电路的cr时间常数(充电时间常数)而上升。在这种情况下,电荷泵电路从上桥臂栅极电源电压305被维持在某种程度的状态起开始充电,因而,电压上升需要减去电压vini而进行计算。另一方面,向栅极驱动电路24的电压被从电容器248大致以恒流来供给,因而,式(1)所示的电压下降量ya基于电容器248的恒流放电时的电压降而下降。
76.实施方式1的电动机驱动系统300使用共用电源方式的栅极驱动电路24,并且对下桥臂开关元件的接通时间进行控制以使得电压下降量ya与电压上升量yb相等,因而能够将会受到动态制动的影响的下桥臂开关元件的接通时间设为最小值。由此,电动机驱动系统300能够将确保上桥臂栅极电源时的动态制动的产生抑制在最小限度。
77.另外,电动机驱动系统300在逆变器停止期间中进行电荷泵电路的充电,因而,不需要作为将电动机控制从off切换为on时的共用电源方式的缺点的事先的充电处理,在线圈切换时不进行控制的期间消失。由此,电动机驱动系统300能够通过无法在单独电源方式下实现的廉价的电动机驱动电路而实现高效的电动机控制。
78.另外,在移动磁铁方式的线性电动机的情况下,如图4所示,在磁铁对120被从第1线圈切换为第2线圈的过程中,存在第1线圈及第2线圈这两者与磁铁对120重叠的情况。另一方面,在实施方式1的方法中,在电动机控制并非有效的情况下,上桥臂开关元件不会接通,即使在下桥臂开关元件中,接通时间也变得极小。因此,能够将由动态制动造成的干扰或冲击的产生抑制在最小限度,在线圈彼此的相连的部位处,能够平滑地进行线圈间的切换。
79.但是,根据电荷泵电路的电阻245及电容器248与通断频率f之间的关系,在下桥臂最小接通时间大于或等于通断频率f的倒数的二分之一的情况下,下桥臂开关元件的接通时间自身会变长。即,在将下桥臂开关元件的接通时间除以下桥臂开关元件的动作时间而得到的值即占空比大于或等于50%的情况下,会大量产生由动态制动的影响引起的制动力。因此,本实施方式的电动机驱动装置200也可以使用满足下式(3)所示的条件的通断频率f。即,也可以以通断频率f小于将由电阻245及电容器248的常数决定的cr时间常数乘以2得到的值的倒数的方式而对电动机驱动装置200设定cr时间常数。
80.【式3】
81.f<1/2cr
…
(3)
82.如以上所说明的那样,根据实施方式1涉及的电动机驱动系统,上级控制装置向第1及第2电动机驱动装置的某一者输出电动机控制有效指令,第1及第2控制部在未接收到电动机控制有效指令的期间,停止上桥臂的驱动指令的输出,以使得成为小于toff的接通时间的方式输出下桥臂的驱动指令。由此,在对由第1电动机驱动装置励磁的第1线圈和由第2电动机驱动装置励磁的第2线圈进行切换时,能够平滑地进行线圈间的切换。
83.另外,实施方式1涉及的电动机驱动系统能够应用于线性电动机,该线性电动机的第1电动机由配置于固定部的第1线圈和配置于以能够向第1方向的正侧及负侧移动的方式构成的可动部的多个磁铁对构成,第2电动机由多个磁铁对和配置于固定部并在第1方向的正侧与第1线圈相邻的第2线圈构成。此时,由第1电动机驱动装置励磁的第1线圈和由第2电动机驱动装置励磁的第2线圈伴随可动部的移动而依次切换为在第1方向的正侧或负侧相邻的线圈。并且,上级控制装置向第1及第2电动机驱动装置的某一者输出电动机控制有效指令,第1及第2控制部在未接收到电动机控制有效指令的期间,停止上桥臂的驱动指令的输出,以使得成为小于toff的接通时间的方式输出下桥臂的驱动指令。由此,即使存在第1及第2线圈这两者与磁铁对重叠的期间,也不会出现第1及第2线圈这两者同时被励磁的情况,在下桥臂的驱动指令为on的短时间以外,开关元件断开,不会流过动态制动电流。由此,能够抑制动态制动的产生。另外,在对由第1电动机驱动装置励磁的第1线圈和由第2电动机驱动装置励磁的第2线圈进行切换时,能够平缓地进行线圈间的切换。
84.另外,为了瞬时地判断电动机控制是否有效,也可以将从上级控制装置传输来的电动机控制有效指令的信息设为参数而存储于存储器23b。这样,现有的功能和新的功能之间的共存是容易的,能够削减系统构建的成本。此外,以下,示出参数的使用方法的一个例子。
85.(1)通常的电动机控制的情况
86.·
将参数设定为“0”。
87.·
在参数为“0”的情况下,在未输出电动机控制有效指令时使所有开关元件断开。
88.(2)移动磁铁控制的情况
89.·
将参数设定“1”。
90.·
在参数为“1”的情况下,在未输出电动机控制有效指令时使上桥臂的开关元件断开,下桥臂的开关元件在第1及第2定时继续进行通断。
91.实施方式2.
92.如实施方式1所示,在电动机正在进行动作时对控制对象进行切换的系统的结构中,例如需要针对高速旋转的电动机开始电动机控制。在以往的电动机驱动装置中,未设想这样的状况。因此,在以往的保护功能中,即使不是异常,也会发出诸如位置偏差异常、速度检测异常、位置检测异常、速度指令异常等这样的警报。因此,在实施方式2中,提出了利用在实施方式1中说明过的电动机控制有效指令而抑制警报的误检测的控制方法。
93.图9是用于实施方式2涉及的电动机驱动系统的动作说明的时序图。在图9中,(a)~(g)的波形与图7所示的波形相同。在实施方式2中,为了抑制警报的误检测,设定了将警报检测设为有效的期间(参照图9(h)、(i))。具体地说,在时刻t21(比时刻t1靠后的时刻)至
时刻t22(比时刻t3靠前的时刻)的期间,针对电动机驱动装置200a而设定了警报检测有效期间。该警报检测有效期间是由控制器125设定的。此外,在图9中,警报检测有效期间是比输出电动机控制有效指令的期间短的期间,但也可以是与输出电动机控制有效指令的期间相同的期间。如果设为相同的期间,则时间管理变得容易,控制变得简单。
94.根据实施方式2涉及的电动机驱动系统,基于电动机控制有效指令而设定警报检测有效期间,因而,能够抑制通过在电动机控制并非有效的期间进行的意料外的动作而发出警报这一情况。
95.另外,根据实施方式2涉及的电动机驱动系统,设定比使电动机控制有效的期间更短的警报检测有效期间,因而,能够减小由于误检测而发出警报的可能性。
96.以上的实施方式所示的结构表示的是本发明的内容的一个例子,也能够与其它的公知技术进行组合,在不脱离本发明的主旨的范围也能够省略、变更结构的一部分。
97.标号的说明
98.18转换器电路,20逆变器电路,21开关元件,21a~21c支路,21un、21vn、21wn下桥臂开关元件,21up、21vp、21wp上桥臂开关元件,22平滑电容器,23控制部,23a处理器,23b存储器,24栅极驱动电路,24a、24b、24c、24d栅极电源电路,26交流电源,27、28直流母线,30驱动指令,32驱动电压,100a、100b、100c线圈,106通信线,120磁铁对,123条形码,124可动转向架,125控制器,130位置传感器,130a、130b、130c传感器,132位置传感器信号,140控制指令,150电动机,200、200a、200b、200c电动机驱动装置,241、245电阻,242光电耦合器,243、244直流电源,246整流二极管,247齐纳二极管,248电容器,300电动机驱动系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。