1.本发明涉及一种摄影测量用摄影装置、造型装置、造型物套装、三维数据生成装置以及造型系统。
背景技术:
2.已知有利用摄影测量方式来制作对象物的三维数据(例如参照专利文献1~3)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2003-14432号公报
6.专利文献2:日本特开2018-44812号公报
7.专利文献3:日本特开2018-36842号公报
技术实现要素:
8.发明要解决的问题
9.本发明提供一种能够在根据对象物来制作用于对立体的造型物进行造型的三维数据时适当地读取对象物来制作三维数据的摄影测量用摄影装置、造型装置、造型物套装、三维数据生成装置以及造型系统。
10.用于解决问题的方案
11.本发明设为如下结构的摄影测量用摄影装置,即,
12.一种摄影测量用摄影装置,使设置于多个不同的视点的多个摄像装置同步地连续拍摄正进行一系列动作的对象物,
13.多个所述摄像装置分别具有:
14.多个摄像部,所述多个摄像部拍摄所述对象物;
15.多个一级存储部,所述多个一级存储部分别存储由多个所述摄像部同步地拍摄所述对象物所得到的各个图像数据;以及
16.多个信号输出部,当所述对象物的前一动作的各个所述图像数据向多个所述一级存储部的存储完成时,所述多个信号输出部针对各个所述图像数据分别输出完成信号,
17.其中,多个所述摄像装置基于所述信号输出部的所述完成信号,来进行所述对象物的后一动作的摄影。
18.根据本发明,能够根据完成信号来识别图像数据向一级存储部的存储完成,因此能够缩短对象物的前一动作的摄影与后一动作的摄影的时间间隔。由此,能够适当地进行连续摄影,并能够实现摄影时间的缩短。因此,能够适当地读取对象物来制作三维数据。
19.在本发明的一个方式所涉及的摄影测量用摄影装置中,
20.还具备控制部,所述控制部被输入来自多个所述摄像装置各自的所述信号输出部的所述完成信号,
21.所述控制部当基于被输入的所述完成信号判断为全部的所述摄像装置中的所述图像数据向所述一级存储部的存储完成时,使多个所述摄像装置执行所述对象物的后一动作的摄影。
22.根据本发明,控制部能够基于完成信号判断为由多个摄像装置拍摄到的全部的图像数据向多个一级存储部的全部一级存储部的存储完成,来执行对象物的后一动作的摄影,因此能够基于简单的判断来执行后一动作的摄影。
23.在本发明的一个方式所涉及的摄影测量用摄影装置中,
24.还具备二级存储部,所述摄像装置的所述一级存储部中存储的拍摄所述对象物的前一动作所得到的所述图像数据被传送到所述二级存储部,并且所述二级存储部存储拍摄所述对象物的所述一系列动作所得到的所述图像数据,
25.当所述一级存储部中存储的所述图像数据被传送到所述二级存储部之后从所述一级存储部中删除被传送的所述图像数据时,所述信号输出部输出所述完成信号。
26.根据本发明,能够在每次拍摄时将一级存储部中存储的图像数据传送到二级存储部,因此能够将一级存储部的存储容量设为小容量,能够实现一级存储部的低成本化。
27.本发明设为如下结构的造型装置,即,
28.一种造型装置,具备显示部,所述显示部显示所述摄影测量用摄影装置的所述二级存储部中存储的所述图像数据,
29.所述造型装置根据在能够从显示于所述显示部的多个所述图像数据中选择用于对立体造型物进行造型的所述图像数据的显示装置中选择出的多个所述图像数据,来生成用于对所述立体造型物进行造型的三维数据,基于所生成的所述三维数据来对所述立体造型物进行造型。
30.根据本发明,能够从连续拍摄正进行一系列动作的对象物所得到的图像数据中任意地选择用于造型为立体造型物的图像数据,并基于所选择的图像数据来对正进行一系列动作的对象物的立体造型物进行造型。
31.本发明设为如下结构的造型物套装,即,
32.一种造型物套装,将通过造型装置造型出的表示所述一系列动作的多个所述立体造型物并列配设。
33.根据本发明,通过将造型出的表示一系列动作的多个立体造型物进行排列,能够通过视觉识别来容易地掌握对象物的动作的变化。
34.本发明设为如下结构的摄影测量用摄影装置,即,
35.一种摄影测量用摄影装置,从多个不同的视点拍摄对象物,所述摄影测量用摄影装置具备:
36.多个摄影设备,所述多个摄影设备拍摄所述对象物;
37.多个支柱,所述多个支柱安装有所述多个摄影设备,并且以包围所述对象物的方式设置;以及
38.多个移动部,所述多个移动部使所述多个支柱的各个支柱相对于所述对象物以接近或远离的方式移动,
39.其中,所述移动部具有对所述支柱移动的路径进行限制的限制构件,
40.所述支柱受所述限制构件限制地在所述路径上移动。
41.根据本发明,在多个支柱移动时,能够使各支柱的姿势稳定并使通过多个支柱包围的空间的大小发生变化。因此,即使在对象物的大小发生变化的情况下,也能够使摄像设备相对于对象物的位置为适当的位置。由此,能够适当地读取对象物来制作三维数据。
42.在本发明的一个方式所涉及的摄影测量用摄影装置中,
43.所述多个支柱以所述对象物为中心在周向上排列配置,
44.所述多个移动部以所述路径在与所述周向正交的径向上延伸的方式配置。
45.根据本发明,被多个支柱包围的空间为以对象物为中心的圆形的空间。因此,从多个支柱的各个支柱到对象物的距离为固定的距离,因此容易进行多个支柱间的位置调整。
46.本发明设为如下结构的三维数据生成装置,即,
47.一种三维数据生成装置,生成三维数据,所述三维数据是表示立体的对象物的立体形状和颜色的数据,所述三维数据生成装置具备:
48.光源,其向所述对象物照射光;
49.摄像机,其拍摄所述对象物;
50.光源控制部,其控制所述光源的动作;
51.摄影控制部,其控制所述摄像机的动作;以及
52.三维数据生成部,其基于由所述摄像机拍摄到的图像来生成所述三维数据,
53.其中,所述摄影控制部使所述摄像机拍摄所述对象物,来获取光源调整用图像和三维数据生成用图像,
54.所述光源调整用图像是用于进行所述光源的调整的图像,
55.所述三维数据生成用图像是用于所述三维数据生成部生成所述三维数据的图像,
56.至少在获取所述光源调整用图像时,在所述对象物的周围设置表示预先设定的颜色的颜色样本,
57.在所述颜色样本被设置于所述对象物的周围的状态下,所述摄影控制部使所述摄像机获取所述光源调整用图像,
58.所述光源控制部基于所述光源调整用图像中拍到的所述颜色样本来决定照射设定,在获取所述三维数据生成用图像时,基于所述照射设定来使所述光源向所述对象物照射光,所述照射设定是在获取所述三维数据生成用图像时使所述光源照射光的光的照射方式。
59.根据本发明,能够适当地调整获取三维数据生成用图像时的光的照射方式。因此,能够适当地读取对象物来制作三维数据。
60.在本发明的一个方式所涉及的三维数据生成装置中,
61.当在所述对象物的周围的互不相同的位置设置有多个所述颜色样本的状态下,所述摄影控制部使所述摄像机获取所述光源调整用图像,
62.所述光源控制部基于所述光源调整用图像中拍到的各个所述颜色样本,来检测向所述对象物的各部分的打光,基于检测出的所述打光来决定所述照射设定。
63.根据本发明,由于能够设为考虑了向对象物的各部分的打光的照射设定,因此能够在向对象物的各部分均匀地照射光的状态下获取三维数据生成用图像。
64.在本发明的一个方式所涉及的三维数据生成装置中,
65.所述光源控制部基于在所述光源调整用图像中拍到的各个所述颜色样本,来检测
所述对象物中的打光不足的部位,以针对所述打光不足的部位照射比获取所述光源调整用图像时多的光的方式决定所述照射设定。
66.根据本发明,能够向对象物适当地照射光。
67.在本发明的一个方式所涉及的三维数据生成装置中,
68.在获取所述光源调整用图像时,所述摄影控制部使所述摄像机从互不相同的多个视点拍摄所述对象物,来获取多个所述光源调整用图像,
69.所述光源控制部基于所述多个光源调整用图像中拍到的所述颜色样本来决定所述照射设定。
70.根据本发明,能够针对对象物的各部分适当地决定照射设定。
71.在本发明的一个方式所涉及的三维数据生成装置中,
72.在获取所述三维数据生成用图像时,所述摄影控制部使所述摄像机从互不相同的多个视点拍摄所述对象物,来获取多个所述三维数据生成用图像,
73.在获取所述光源调整用图像时,所述摄影控制部使所述摄像机从比获取所述三维数据生成用图像时多的多个视点拍摄所述对象物,来获取多个所述光源调整用图像。
74.根据本发明,能够防止用于生成三维数据的处理的负担变大等并能够适当地决定照射设定。
75.在本发明的一个方式所涉及的三维数据生成装置中,
76.具备多个所述光源,
77.所述光源控制部基于所述光源调整用图像中拍到的所述颜色样本,来决定表示所述多个光源各自的光的照射方式的所述照射设定,在获取所述三维数据生成用图像时,基于所述照射设定来使所述多个光源向所述对象物照射光。
78.根据本发明,能够从多个方向对对象物照射光。因此,通过基于照射设定来进行各个光源的控制,能够使来自各个方向的光的照射方式进行各种各样的变化。因此,能够更适当地向对象物照射光。
79.在本发明的一个方式所涉及的三维数据生成装置中,
80.具备演色性互不相同的多个所述光源。
81.根据本发明,能够使利用多个光源获得的演色性进行各种各样的变化。由此,能够使向对象物照射光的照射方式进行更多种多样的变化。
82.在本发明的一个方式所涉及的三维数据生成装置中,
83.在获取所述三维数据生成用图像时也在所述对象物的周围设置所述颜色样本,
84.在所述颜色样本被设置于所述对象物的周围的状态下,所述摄影控制部使所述摄像机获取所述三维数据生成用图像,
85.所述三维数据生成部基于所述三维数据生成用图像中拍到的所述颜色样本,来对所述三维数据生成用图像进行颜色的调整。
86.根据本发明,通过适当地进行颜色的调整,能够适当地进行三维数据的生成。
87.本发明设为如下结构的造型系统,即,
88.一种造型系统,对立体的造型物进行造型,所述造型系统具备:
89.三维数据生成装置,其生成三维数据,所述三维数据是表示立体的对象物的立体形状和颜色的数据;以及
90.造型装置,其基于所述三维数据来对造型物进行造型,
91.所述三维数据生成装置具有:
92.光源,其向所述对象物照射光;
93.摄像机,其拍摄所述对象物;
94.光源控制部,其控制所述光源的动作;
95.摄影控制部,其控制所述摄像机的动作;以及
96.三维数据生成部,其基于由所述摄像机拍摄到的图像来生成所述三维数据,
97.其中,所述摄影控制部使所述摄像机拍摄所述对象物,来获取光源调整用图像和三维数据生成用图像,
98.所述光源调整用图像是用于进行所述光源的调整的图像,
99.所述三维数据生成用图像是用于所述三维数据生成部生成所述三维数据的图像,
100.至少在获取所述光源调整用图像时,在所述对象物的周围设置表示预先设定的颜色的颜色样本,
101.在所述颜色样本被设置于所述对象物的周围的状态下,所述摄影控制部使所述摄像机获取所述光源调整用图像,
102.所述光源控制部基于所述光源调整用图像中拍到的所述颜色样本来决定照射设定,在获取所述三维数据生成用图像时,基于所述照射设定来使所述光源向所述对象物照射光,所述照射设定是在获取所述三维数据生成用图像时使所述光源照射光的光的照射方式。
103.根据本发明,能够适当地调整获取三维数据生成用图像时的光的照射方式。因此,能够适当地读取对象物来制作三维数据。
104.发明的效果
105.根据本发明,能够提供一种在制作对象物的三维数据时能够适当地读取对象物来制作三维数据的摄影测量用摄影装置、造型装置、造型物套装、三维数据生成装置以及造型系统。
附图说明
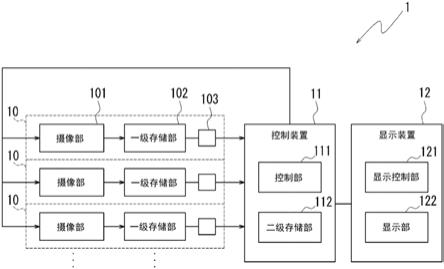
106.图1是示出本实施方式所涉及的摄影测量用摄影装置的控制系统的概要结构图。
107.图2是示出多个摄影设备的摄影动作的说明图。
108.图3是与摄影测量用摄影装置的摄影动作有关的说明图。
109.图4是与摄影测量用摄影装置的同步连续摄影方法有关的流程图。
110.图5是与摄影测量用摄影装置以及造型装置有关的图。
111.图6是与造型物套装有关的图。
112.图7是对本实施方式所涉及的摄影测量用摄影装置中的摄影设备的配置进行说明的立体图。
113.图8是对本实施方式所涉及的摄影测量用摄影装置中的摄影设备的配置的其它方式进行说明的立体图。
114.图9是对第一变形例所涉及的摄影测量用摄影装置中的摄影设备的配置进行说明的立体图。
115.图10是对第一变形例所涉及的摄影测量用摄影装置中的摄影设备的配置的其它方式进行说明的立体图。
116.图11是对第二变形例所涉及的摄影测量用摄影装置中的摄影设备的配置进行说明的图。
117.图12是对第三变形例所涉及的摄影测量用摄影装置进行说明的图。
118.图13是对本实施方式所涉及的造型系统进行说明的图。
119.图14是对造型装置进行说明的图。
120.图15是对造型装置的头部进行说明的图。
121.图16是对立体造型物进行说明的图。
122.图17是对控制pc进行说明的图。
123.图18是对三维数据生成装置进行说明的图。
124.图19是对色靶进行说明的图。
125.图20是示出生成三维数据的动作的流程图。
126.图21是对光源进行说明的图。
具体实施方式
127.下面,基于附图来说明本发明所涉及的实施方式。此外,本发明并不限定于该实施方式。另外,在下述实施方式中的构成要素中包括本领域技术人员能够容易地置换的构成要素、或者实质相同的构成要素。并且,下面记载的构成要素能够适当地组合,另外,在存在多个实施方式的情况下,也能够将各实施方式进行组合。
128.[本实施方式]
[0129]
本实施方式所涉及的摄影测量用摄影装置1是从多个不同的视点拍摄对象物的装置,特别是连续拍摄随时间而变化的对象物的装置。作为随时间而变化的对象物,例如是进行棒球的投球动作的投手等,是正进行一系列动作的对象物。由摄影测量用摄影装置1拍摄到的摄影图像被用于生成对象物的三维数据。参照图1来说明摄影测量用摄影装置1。
[0130]
图1是示出本实施方式所涉及的摄影测量用摄影装置的控制系统的概要结构图。摄影测量用摄影装置1具备多个摄影设备(摄像装置)10、控制装置11以及显示装置12。摄影测量用摄影装置1对正进行一系列动作的对象物进行对象物的前一动作的摄影,并且进行对象物的后一动作的摄影,由此进行连续摄影。
[0131]
多个摄影设备10例如是从不同的视点拍摄对象物的多台摄像机。视点由摄像机的设置位置和摄像机的朝向决定。作为摄像机,例如可以为具有usb等连接端子的摄像机,并不特别限定。摄影设备10通过被输入输入触发而执行拍摄,在拍摄结束后输出输出触发(完成信号)。
[0132]
摄影设备10具有摄像部101、一级存储部102以及信号输出部103。摄像部101是图像传感器等摄像元件,生成与拍摄到的对象物的摄影图像有关的图像数据。一级存储部102例如是高速缓冲存储器等半导体存储设备,对由摄像部101生成的图像数据进行一级存储。一级存储部102当将图像数据传送到控制装置11的二级存储部112时,删除所存储的图像数据。信号输出部103判定图像数据向一级存储部102的存储是否完成,当判定为图像数据向一级存储部102的存储完成时,向控制装置11输出作为完成信号的输出触发。
[0133]
摄影设备10当被输入了输入触发时,执行利用摄像部101进行的摄影,将由摄像部101生成的摄影图像的图像数据保存到一级存储部102。另外,摄影设备10向二级存储部112输出由摄像部101生成的图像数据。摄影设备10当向二级存储部112进行的图像数据的输出完成时,删除一级存储部102中存储的图像数据,从信号输出部103向控制装置11输出输出触发,从而完成摄影动作。
[0134]
控制装置11与多个摄影设备10电连接。控制装置11具有控制部111和二级存储部112。
[0135]
控制部111例如包括cpu(central processing unit:中央处理单元)等集成电路。控制部111对摄影测量用摄影装置1的摄影动作进行控制。具体地说,控制部111对多个摄影设备10的摄影动作进行控制、或者进行与多个摄影设备10的输入输出触发有关的控制。
[0136]
二级存储部112存储从摄影设备10输出的图像数据。二级存储部112是半导体存储设备以及磁存储设备等任意的存储设备。另外,二级存储部112也可以包括多个种类的存储设备。二级存储部112例如是非易失性的存储设备,既可以是快闪存储器等存储卡,也可以是ssd或hdd等存储介质。
[0137]
显示装置12与控制装置11电连接。显示装置12具有显示控制部121和显示部122。
[0138]
显示控制部121例如包括cpu(central processing unit:中央处理单元)等集成电路。显示控制部121从控制装置11的二级存储部112获取图像数据,并且使显示部122显示所获取到的图像数据。显示部122例如是液晶显示器等显示设备。此外,显示部122也可以是触摸面板等能够进行输入操作的显示设备。显示部122通过显示控制部121的显示控制来显示由摄影设备10拍摄到的各种图像。
[0139]
图2是示出多个摄影设备10的摄影动作的说明图。
[0140]
在由多个摄影设备10同步地进行摄影的情况下,控制部111在相同的摄影定时向多个摄影设备10输入输入触发。当向多个摄影设备10输入了输入触发时,在规定的摄影时间进行拍摄,此后在规定的保存时间向一级存储部102保存图像数据。在此,“规定的摄影时间”是摄像部101执行拍摄并由摄像部101生成摄影图像的图像数据为止的时间。该摄影时间在多个摄影设备10之间是大致相同的时间间隔。另外,“规定的保存时间”是将所生成的图像数据保存到一级存储部102中为止的时间。该保存时间在多个摄影设备10之间是不同的时间间隔。这是由于根据摄影设备10的不同而与保存有关的处理不同。例如,由摄影设备10拍摄到的摄影图像的图像数据有时在摄影设备10之间是不同的,图像数据的数据量越大则保存时间越长。因此,摄影设备10的摄影结束的定时在多个摄影设备10之间是不同的。此外,除了图像数据的数据量以外,保存时间还会根据数据的传送速度等而不同。在本实施方式中,摄影测量用摄影装置1执行图3和图4所示的摄影动作,以使得即使在保存时间不同的情况下多个摄影设备10也同步地进行能够连续拍摄的摄影动作。也就是说,在摄影测量用摄影装置1中,以在对象物的前一动作的摄影中使多个摄影设备10同步地进行拍摄、并且在对象物的后一动作的摄影中使多个摄影设备10同步地进行摄影的方式执行摄影动作。
[0141]
图3是与摄影测量用摄影装置的摄影动作有关的说明图。
[0142]
图4是与摄影测量用摄影装置的同步连续摄影方法有关的流程图。图3和图4的同步连续摄影方法是使设置于多个不同的视点的多个摄影设备10同步地连续拍摄对象物的方法。
[0143]
在摄影测量用摄影装置1中,首先,执行通过多个摄影设备10基于输入触发来拍摄对象物的步骤s101、步骤s102、步骤s103(摄影步骤)。之后,在摄影测量用摄影装置1中,在由多个摄影设备10拍摄对象物之后,执行判定多个一级存储部102是否处于能够存储图像数据的状态的步骤s104(判定步骤)。然后,在摄影测量用摄影装置1中,在判定为多个一级存储部102处于能够存储图像数据的状态的情况下,执行向多个摄影设备10输出输入触发的步骤s101(输出步骤)。
[0144]
下面,具体地说明摄影测量用摄影装置1的摄影动作。
[0145]
在摄影测量用摄影装置1中,首先,控制部111向多个摄影设备10同步地输出输入触发(步骤s101)。多个摄影设备10的各个摄影设备10当被输入了输入触发时,在规定的摄影时间执行拍摄来生成图像数据,并且在规定的保存时间执行所生成的图像数据向一级存储部102的保存,结束摄影动作(步骤s102)。
[0146]
多个摄影设备10的各个摄影设备10在拍摄对象物之后,向控制部111输出输出触发(步骤s103)。具体地说,摄影设备10在拍摄对象物之后,通过信号输出部103来判定图像数据向一级存储部102的存储是否完成。在由信号输出部103判定为图像数据向一级存储部102的存储完成之后,摄影设备10将图像数据从一级存储部102传送到二级存储部112。而且,当图像数据向二级存储部112的传送完成时,摄影设备10删除一级存储部102中存储的图像数据。摄影设备10当删除了一级存储部102中存储的图像数据时,从信号输出部103向控制装置11输出作为完成信号的输出触发。此时,多个摄影设备10的各个摄影设备10的步骤s102中的保存时间不同,因此如图2所示那样摄影结束的定时不同。因此,在步骤s103中,从摄影设备10向控制部111输出的输出触发的定时不同。
[0147]
控制部111判定是否存在从全部的摄影设备10输出的输出触发的输入(步骤s104)。在步骤s104中,控制部111例如使用and函数来进行判定,判定是否被输入了从摄影设备10输出的全部的输出触发。而且,控制部111通过基于步骤s104的判定,来判定多个一级存储部102是否处于能够存储图像数据的可摄影状态。即,输出触发的输出在从一级存储部102向二级存储部112移送图像数据之后进行,因此在向控制部111进行输出触发的输入时,处于能够对一级存储部102存储图像数据的状态。
[0148]
控制部111当在步骤s104中判定为被输入了来自全部的摄影设备10的输出触发时(步骤s104:“是”),判定摄影是否结束(步骤s105)。另一方面,控制部111当在步骤s104中判定为没有被输入来自全部的摄影设备10的输出触发时(步骤s104:“否”),重复执行步骤s104直到被输入来自全部的摄影设备10的输出触发为止。
[0149]
控制部111当在步骤s105中判定为摄影结束时(步骤s105:“是”),使摄影测量用摄影装置1结束摄影动作。另一方面,控制部111当在步骤s105中判定为摄影未结束时(步骤s105:“否”),再次进入步骤s101,向多个摄影设备10输出输入触发。
[0150]
由此,在摄影测量用摄影装置1中,能够在对象物的前一动作的摄影中使多个摄影设备10同步地进行拍摄,并且能够在对象物的后一动作的摄影中使多个摄影设备10同步地进行拍摄。此外,步骤s105中的摄影结束例如基于与连续摄影有关的摄影次数是否达到了预先设定的规定的次数、或者与连续摄影有关的摄影时间是否达到了预先设定的规定的时间等来判定。
[0151]
接着,参照图5和图6来说明使用由摄影测量用摄影装置1拍摄到的图像数据的造
型装置2和造型物套装s。
[0152]
图5是与摄影测量用摄影装置以及造型装置有关的图。
[0153]
图6是与造型物套装有关的图。
[0154]
在此,由摄影测量用摄影装置1拍摄到的图像数据d是通过多个摄影设备10同步地连续拍摄正进行一系列动作的对象物而获取到的图像数据。在对对象物的立体造型物进行造型的情况下,需要生成用于对立体造型物进行造型的三维数据。例如,在对正进行一系列动作的对象物中的进行前一动作的对象物的立体造型物进行造型的情况下,基于拍摄对象物的前一动作所得到的多个图像数据d来生成三维数据。另外,在对进行后一动作的对象物的立体造型物进行造型的情况下,基于拍摄对象物的后一动作所得到的多个图像数据d来生成三维数据。此时,使用的图像数据d是从显示于显示装置12的显示部122的多个图像数据d中选择出的任意的图像数据d。
[0155]
如图5所示,造型装置2当从摄影测量用摄影装置1获取到图像数据d时,根据所获取到的图像数据d来生成用于对立体造型物进行造型的三维数据。具体地说,造型装置2在生成进行前一动作的对象物的三维数据的情况下,使用拍摄对象物的前一动作所得到的多个图像数据d。另外,造型装置2在生成进行后一动作的对象物的三维数据的情况下,使用拍摄对象物的后一动作所得到的多个图像数据d。而且,造型装置2基于所生成的三维数据来对立体造型物进行造型。此外,作为造型装置2,可以是任何的造型装置,例如可以是通过喷墨方式喷出造型墨水来形成单位层并通过层叠单位层来对立体造型物进行造型的装置。
[0156]
如图6所示,由造型装置2造型出的表示一系列动作的多个立体造型物(m1~m4)通过并列地配设,能够作为造型物套装s来提供。此外,图6所示的造型物套装s应用了进行棒球的投球动作的投手来作为表示一系列动作的立体造型物(m1~m4)。造型物套装s包括进行前一动作的对象物的立体造型物和进行后一动作的对象物的立体造型物,由此能够设为立体造型物是按时间序列而变化的造型物。此外,在图6中,作为造型物套装s例示了棒球的投球姿势的造型物(m1~m4),但是并不限定于此。例如,也可以是高尔夫的挥杆姿势的造型物。
[0157]
如以上那样,本实施方式所涉及的摄影测量用摄影装置1具有下面的结构。
[0158]
(1)摄影测量用摄影装置1使设置于多个不同的视点的多个摄影设备10(摄像装置)同步地连续拍摄正进行一系列动作的对象物。
[0159]
多个摄影设备10具有拍摄对象物的多个摄像部101。
[0160]
多个摄影设备10分别具有多个一级存储部102和多个信号输出部103,
[0161]
多个一级存储部102分别存储由多个摄像部101同步地拍摄对象物所得到的各个图像数据d,
[0162]
当对象物的前一动作的各个图像数据d向多个一级存储部102的存储完成时,多个信号输出部103针对各个图像数据分别输出完成信号。
[0163]
多个摄影设备10基于信号输出部103的完成信号,来进行对象物的后一动作的摄影。
[0164]
当像这样构成时,当对象物的前一动作的各个图像数据d向一级存储部102的存储完成时,能够从信号输出部103输出完成信号。因此,能够根据完成信号来识别图像数据d向一级存储部102的存储完成。
[0165]
由此,对于对象物的后一动作的摄影,能够不增加多余时间地进行拍摄,因此能够缩短对象物的前一动作的摄影与后一动作的摄影的时间间隔(摄影间隔)。因此,能够适当地进行连续摄影,并能够实现摄影时间的缩短。即,能够适当地读取对象物来制作三维数据。
[0166]
本实施方式所涉及的摄影测量用摄影装置1具有下面的结构。
[0167]
(2)摄影测量用摄影装置1还具备被输入来自多个摄影设备10各自的信号输出部103的完成信号的控制部111。
[0168]
控制部111当基于被输入的完成信号判断为全部的摄影设备10中的图像数据d向一级存储部102的存储完成时,使多个摄影设备10执行对象物的后一动作的摄影。
[0169]
当像这样构成时,控制部111能够基于完成信号判断为由多个摄影设备10拍摄到的全部的图像数据d向多个一级存储部102的全部一级存储部102的存储完成并执行对象物的后一动作的摄影,因此能够基于简单的判断来执行后一动作的摄影。
[0170]
本实施方式所涉及的摄影测量用摄影装置1具有下面的结构。
[0171]
(3)摄影测量用摄影装置1还具备二级存储部112,一级存储部102中存储的拍摄对象物的前一动作所得到的图像数据d被传送到该二级存储部112,并且该二级存储部112存储拍摄对象物的一系列动作所得到的图像数据d。
[0172]
当在一级存储部102中存储的图像数据d被传送到二级存储部112之后从一级存储部102中删除被传送的图像数据d时,信号输出部103输出完成信号。
[0173]
当像这样构成时,能够在每次拍摄时将一级存储部102中存储的图像数据d传送到二级存储部112,因此能够将一级存储部102的存储容量设为小容量,能够实现一级存储部102的低成本化。
[0174]
另外,也能够特定为使用本实施方式所涉及的摄影测量用摄影装置1的造型装置2。
[0175]
具体地说,
[0176]
(4)摄影测量用摄影装置1具备显示装置12。
[0177]
二级存储部112中存储的图像数据d被显示于显示装置12的显示部122。
[0178]
显示装置12能够从显示于显示部122的多个图像数据d中选择对立体造型物进行造型的图像数据d。
[0179]
造型装置2根据利用显示装置12选择出的多个图像数据d来生成用于对立体造型物进行造型的三维数据,基于所生成的三维数据来对立体造型物进行造型。
[0180]
当像这样构成时,能够在显示装置12中选择对立体造型物进行造型的对象物的图像数据d。因而,能够从连续拍摄正进行一系列动作的对象物所得到的图像数据d中任意地选择图像数据d,并能够基于选择出的图像数据来对正进行一系列动作的立体造型物进行造型。
[0181]
另外,也能够特定为将由本实施方式所涉及的造型装置2造型出的多个立体造型物并列配设而成的造型物套装s。
[0182]
具体地说,
[0183]
(5)造型物套装s将由造型装置2造型出的表示一系列动作的多个立体造型物并列配设。
[0184]
当像这样构成时,能够将造型出的表示一系列动作的多个立体造型物排列来作为造型套装s进行提供,因此能够通过视觉识别来容易地掌握立体造型物的动作的变化。
[0185]
本实施方式所涉及的摄影测量用摄影装置1的显示装置12具有下面的结构。
[0186]
(6)具备显示二级存储部112中存储的图像数据d的显示部122,能够从显示于显示部122的多个图像数据d中选择对立体造型物进行造型的图像数据d。
[0187]
当像这样构成时,能够在显示装置12中选择对立体造型物进行造型的对象物的图像数据d,因此能够从连续拍摄正进行一系列动作的对象物所得到的图像数据d中任意地选择用于造型为立体造型物的图像数据d。
[0188]
使用由本实施方式所涉及的摄影测量用摄影装置1拍摄到的图像数据的造型装置2具有下面的结构。
[0189]
(7)根据在显示装置12中选择出的多个图像数据d来生成用于对立体造型物进行造型的三维数据,基于所生成的三维数据来对立体造型物进行造型。
[0190]
当像这样构成时,能够通过造型装置2来对正进行一系列动作的对象物的立体造型物进行造型。
[0191]
此外,在本实施方式中,在步骤s104中控制部111没有被输入来自全部的摄影设备10的输出触发的情况下,控制部111执行步骤s104直到被输入来自全部的摄影设备10的输出触发为止,但是并不限定于该结构。也可以是,在步骤s104中控制部111没有被输入来自全部的摄影设备10的输出触发的情况下,判定是否超过预先设定的计数时间,在判定为超过了计数时间的情况下,输出错误。
[0192]
另外,在本实施方式中,将二级存储部112设置于控制装置11,但是也可以在多个摄像设备10中分别设置二级存储部112。通过摄影设备10具有二级存储部112,能够加快从一级存储部102向二级存储部112的图像数据d的传送速度,因此能够迅速地从信号输出部103输出输出触发,能够实现摄影间隔的缩短。此时,也可以将一级存储部102与二级存储部112构成为一体。
[0193]
下面,对本实施方式的摄影测量用摄影装置1中的摄影设备10的具体的配置例进行说明。
[0194]
图7是对摄影测量用摄影装置1中的摄影设备10的配置进行说明的立体图。
[0195]
图8是对摄影测量用摄影装置1中的摄影设备10的配置的其它方式进行说明的立体图。
[0196]
如图7所示,摄影测量用摄影装置1具备多个摄影设备10、多个支柱31以及多个移动部32。
[0197]
多个摄影设备10例如是多台摄像机。作为摄像机,例如可以为具有usb等连接端子的摄像机,并不特别限定。摄影设备10拍摄对象物来生成摄影图像。多个摄影设备10的摄影动作由未图示的控制装置来控制,具体地说,多个摄影设备10也可以被控制为同步地进行连续摄影。
[0198]
多个支柱31呈在长轴方向上延伸的柱状,被配置为长轴方向为铅垂方向。多个支柱31被配置为包围作为摄影对象的对象物的周围。具体地说,多个支柱31通过以对象物为中心在周向上排列配置,由此在从铅垂方向观察的俯视观察中为圆形配置。另外,在各支柱31安装有多个摄影设备10。多个摄影设备10在支柱31的长轴方向上等间隔地配置。安装于
支柱31的摄影设备10的数量没有特别限定,另外,也可以设为能够装卸的结构。支柱31的在铅垂方向的下方侧的端部以移动自如的方式连接于移动部32。此外,支柱31也可以构成为能够在长轴方向上进行伸缩。作为能够伸缩的支柱31,例如有嵌套式的多层管构造等。
[0199]
多个移动部32被配置在用于设置摄影测量用摄影装置1的设置面上,用于使所连接的支柱31在路径上沿规定的移动方向移动。移动部32具有作为对所连接的支柱31的移动进行限制并进行引导的限制构件的导轨(引导部)33。导轨33例如可以是在与支柱31连结的部位通过被夹具夹持而具有滑动阻力那样的导轨、或者是通过被使用了弹簧等的按压构件按压而具有滑动阻力那样的导轨,只要是对移动进行限制并进行引导即可,并不特别限定。移动部32使支柱31的移动方向为相对于对象物接近(前进)或远离(后退)的进退方向。具体地说,进退方向是由多个支柱31形成的圆形的径向。因此,多个移动部32从对象物的中心朝向径向的外侧呈辐射状地配置。
[0200]
摄影测量用摄影装置1为可组装的结构,能够在组装前的状态下进行搬送。组装前的摄影测量用摄影装置1是摄影设备10以及支柱31与移动部32分离的状态,能够将多个支柱31捆绑起来并且以将多个移动部32捆绑起来的状态进行搬送。
[0201]
在对摄影测量用摄影装置1进行组装的情况下,首先,将多个移动部32设置于设置面。此时,多个移动部32被设置为进退方向以对象物为中心呈辐射状。之后,通过将多个支柱31的下方侧的端部与对应的多个移动部32连接,多个支柱31沿铅垂方向竖直设置,摄影测量用摄影装置1的组装完成。
[0202]
对摄影测量用摄影装置1的方式进行说明。摄影测量用摄影装置1能够根据要拍摄的对象物的大小来调整多个支柱31以及多个移动部32的数量。图7是对象物大的情况下的摄影测量用摄影装置1的形态,图8是与图7相比对象物较小的情况下的摄影测量用摄影装置1的形态。
[0203]
在图7的情况下,摄影测量用摄影装置1通过使支柱31相对于移动部32的位置位于进退方向的后退侧的端部,能够拍摄大的对象物。
[0204]
与此相对地,在图8的情况下,摄影测量用摄影装置1通过使支柱31相对于移动部32的位置位于进退方向的比图7靠前进侧的位置,能够拍摄小的对象物。此时,在图8中,由于使支柱31位于前进侧,多个支柱31间的在周向上的间隔变窄。在多个支柱31间的在周向上的间隔窄的情况下,能够通过去掉某些支柱31和移动部32来调整支柱31的间隔。
[0205]
如以上那样,本实施方式所涉及的摄影测量用摄影装置1具有下面的结构。
[0206]
(8)摄影测量用摄影装置1从多个不同的视点拍摄对象物。
[0207]
摄影测量用摄影装置1具备:
[0208]
多个摄影设备10,所述多个摄影设备10拍摄对象物;
[0209]
多个支柱31,所述多个支柱31安装有多个摄影设备10,并且以包围对象物的方式设置;以及
[0210]
多个移动部32,所述多个移动部32使多个支柱31的各个支柱31相对于对象物以接近或远离的方式移动。
[0211]
移动部32具有对支柱31移动的路径进行限制的导轨33(限制构件)。
[0212]
支柱31受导轨33限制地在路径上移动。
[0213]
当像这样构成时,能够通过多个移动部32来使多个支柱31沿路径上的进退方向移
动。此时,各支柱31一边受导轨33限制一边在路径上移动,因此在各支柱31移动时,能够使各支柱31的姿势稳定并能够使被多个支柱31包围的空间的大小变化。
[0214]
因此,即使在拍摄大小不同的对象物的情况下,也能够通过使多个支柱31沿路径上的进退方向移动,来根据对象物的大小将摄像设备10的位置设为适当的位置。
[0215]
因此,能够适当地拍摄对象物。
[0216]
另外,由于能够根据对象物的大小来调整所使用的摄影设备31、支柱31以及移动部32的数量,因此能够设为适合于对象物的大小的装置结构。因此,不需要具有多台与对象物的大小相应的摄影测量装置,因此能够抑制装置成本的增加。
[0217]
本实施方式所涉及的摄影测量用摄影装置1具有下面的结构。
[0218]
(9)多个支柱31以对象物为中心在周向上排列配置。
[0219]
多个移动部32以路径在与周向正交的径向上延伸的方式配置。
[0220]
当像这样构成时,能够将被多个支柱31包围的空间设为以对象物为中心的圆形的空间。因此,能够将从多个支柱31的各个支柱31到对象物的距离设为固定的距离,能够容易地进行进退方向上的多个支柱31的位置调整。
[0221]
此外,在实施方式1中,关于在相邻的支柱31上安装的摄影设备10的在铅垂方向上的位置,没有特别说明,但是可以将摄影设备10的在铅垂方向上的位置设为下面那样。
[0222]
(i)可以是,在相邻的支柱31上安装的摄影设备10的在铅垂方向上的位置为相同的位置,在多个支柱31排列的周向上,多个摄影设备10设为网格状的配置。
[0223]
(ii)可以是,在相邻的支柱31上安装的摄影设备10的在铅垂方向上的位置为互不相同的位置,在多个支柱31排列的周向上,多个摄影设备10设为交错状的配置。
[0224]
[第一变形例]
[0225]
下面,对变形例所涉及的摄影测量用摄影装置进行说明。
[0226]
图9是对第一变形例所涉及的摄影测量用摄影装置1a中的摄影设备10的配置进行说明的立体图。
[0227]
图10是对摄影测量用摄影装置1a中的摄影设备10的配置的其它方式进行说明的立体图。
[0228]
此外,在下面的说明中,对与本实施方式所涉及的摄影测量用摄影装置1不同的部分进行说明,对相同的部分标注相同的标记来进行说明。
[0229]
第一变形例所涉及的摄影测量用摄影装置1a是在本实施方式所涉及的摄影测量用摄影装置1(参照图7)中还具备用于将多个支柱31聚拢的连结部34。连结部34与多个支柱31的上方侧的端部连接。连结部34例如为伞骨的构造。
[0230]
具体地说,连结部34具有主要部分36以及多个竿状部35。多个竿状部35分别与多个支柱31的上方侧的端部连结。多个竿状部35从多个支柱31的上方侧的端部朝向处于呈圆形配置的多个支柱31的中心的上方侧的顶点延伸,形成为在长轴方向上长的竿状。主要部分36与多个竿状部35的同连结支柱31的一侧相反一侧的端部连结,使多个竿状部35在顶点处聚拢。另外,多个支柱31与多个竿状部35的连结部分以能够自如移动的方式连结,多个竿状部35与主要部分36的连结部分以能够自如移动的方式连结。
[0231]
多个支柱31为上方侧的端部与连结部34连结、下方侧的端部与导轨33连结的状态。在该状态下,当多个支柱31通过多个移动部32进行移动时,多个支柱31由于通过连结部
34被连结起来而同步地移动。也就是说,多个支柱31通过连结部34被连结起来,由此在相同的定时以成为大致相同的移动量的方式进行移动。随着多个支柱31的移动,连结部34的主要部分36在铅垂方向上移动,多个竿状部35以主要部分36为中心打开和闭合。换言之,连结部34通过使多个竿状部35以主要部分36为中心闭合,来使多个支柱31以彼此接近的方式移动。另外,多个支柱31在因连结部34而同步地移动时,支柱31的下方侧端部一边被导轨33引导一边移动。
[0232]
第一变形例所涉及的摄影测量用摄影装置1a与本实施方式所涉及的摄影测量用摄影装置1(参照图7)同样地是可组装的结构,能够在组装前的状态下进行搬送。
[0233]
组装前的摄影测量用摄影装置1是摄影设备10、多个支柱31以及连结部34与移动部32分离的状态。关于连结部34以及多个支柱31,通过主要部分36向铅垂方向的下方侧移动,来将多个支柱31与多个竿状部35以在径向上重叠的方式折叠。此外,也可以设为能够将多个支柱31与连结部34分离。而且,能够以将多个支柱31与多个竿状部35折叠并聚拢、并且将多个移动部32聚拢的状态进行搬送。
[0234]
在对摄影测量用摄影装置1进行组装的情况下,首先,将多个移动部32设置于设置面。此时,多个移动部32被设置为进退方向以对象物为中心呈辐射状。之后,以主要部分36为中心将多个支柱31与多个竿状部35打开并展开。然后,将多个支柱31的下方侧的端部与对应的多个移动部32连接,由此多个支柱31沿铅垂方向竖直设置,摄影测量用摄影装置1b的组装完成。
[0235]
接着,对第一变形例所涉及的摄影测量用摄影装置1a的方式进行说明。图9是对象物大的情况下的摄影测量用摄影装置1a的方式,图10是与图9相比对象物较小的情况下的摄影测量用摄影装置1a的方式。
[0236]
在图9的情况下,摄影测量用摄影装置1a使支柱31相对于移动部32的位置位于进退方向的后退侧的端部,以拍摄大的对象物。此时,连结部34为相比于图10而言打开了的状态,即,将支柱31的上方侧的端部与顶点连结的竿状部35相对于水平面的角度为相比于图10而言较小的角度。
[0237]
与此相对地,在图10的情况下,摄影测量用摄影装置1使支柱31相对于移动部32的位置位于进退方向的比图9靠前进侧的位置,以拍摄小的对象物。此时,连结部34为相比于图9而言闭合了的状态,即,将支柱31的上方侧的端部与顶点连结的竿状部35相对于水平面的角度为相比于图9而言较大的角度。另外,在图10中,通过使支柱31位于前进侧,多个支柱31间的在周向上的间隔变窄,因此也可以去除某些支柱31和移动部32。
[0238]
第一变形例所涉及的摄影测量用摄影装置1a具有下面的结构。
[0239]
(10)摄影测量用摄影装置1还具备连结多个支柱31的连结部34。
[0240]
多个支柱31通过连结部34来同步地进行基于多个移动部32的移动。
[0241]
当像这样构成时,由于能够通过连结部34来使多个支柱31同步地移动,因此与使支柱31独立地移动的情况相比,能够高效地使支柱31移动。
[0242]
第一变形例所涉及的摄影测量用摄影装置1a具有下面的结构。
[0243]
(11)多个支柱31的一个端部与连结部34连结,另一个端部与作为限制构件的导轨33(引导部)连结。
[0244]
当像这样构成时,在通过与多个支柱31的上方侧端部连结的连结部34来使多个支
柱31同步地移动时,支柱31以支柱31的下方侧端部被导轨33引导着的状态移动。因此,能够使支柱31在对支柱31的上下两端进行了限制的状态下移动,因此能够使支柱31在维持规定的姿势的状态下稳定地移动。
[0245]
第一变形例所涉及的摄影测量用摄影装置1a具有下面的结构。
[0246]
(12)连结部34具有:
[0247]
多个竿状部35,所述多个竿状部35分别与多个支柱31的一个端部连结;以及
[0248]
主要部分36,其与多个竿状部35的同连结支柱31的一侧相反一侧的端部连结,该主要部分36用于将多个竿状部35聚拢。
[0249]
连结部34将多个支柱31彼此以能够使接近的方式连结。
[0250]
当像这样构成时,摄影测量用摄影装置1a通过连结部34使多个支柱31彼此接近并进行折叠,由此能够在连结起来的状态下形成为小型。因此,能够容易地搬运摄影测量用摄影装置1a。
[0251]
另外,由于能够通过连结部34将多个支柱31聚拢,因此支柱31不会分散开,能够容易地进行多个支柱31的处理。
[0252]
[第二变形例]
[0253]
对第二变形例所涉及的摄影测量用摄影装置1b进行说明。
[0254]
图11是对第二变形例所涉及的摄影测量用摄影装置1b中的摄影设备10的配置进行说明的图,是对移动部32以及支柱31周围进行说明的图。
[0255]
此外,在下面的说明中,对与本实施方式所涉及的摄影测量用摄影装置1不同的部分进行说明,对相同的部分标注相同的标记来进行说明。
[0256]
在摄影测量用摄影装置1b中,在相邻的支柱31、31之间设置有将这些支柱31、31连接的连接构件315。连接构件315在支柱31的长轴方向上并列地设置多个。连接构件315为能够折叠的构件,在使相邻的支柱31、31成为一体的情况下连接构件315被折叠,另一方面,在解除支柱31、31的一体化的情况下连接构件315被展开。
[0257]
在此,“使相邻的支柱31、31成为一体”是使相邻的支柱31、31向彼此接近的方向移动来使这些支柱31、31重叠。另外,“解除支柱31、31的一体化”是使重叠状态的支柱31、31向彼此远离的方向移动来解除支柱31、31重叠的状态。
[0258]
另外,在相邻的移动部32、32之间设置有将这些移动部32、32连接的连接构件325。连接构件325在移动部32的移动方向上并列地设置多个。连接构件325与连接构件315同样地是可折叠的构件,在使相邻的移动部32、32成为一体的情况下连接构件325被折叠,另一方面,在解除移动部32、32的一体化的情况下连接构件325被展开。
[0259]
在此,“使相邻的移动部32、32成为一体”是使相邻的移动部32、32向彼此接近的方向移动来使这些移动部32、32重叠。另外,“解除移动部32、32的一体化”是使重叠状态的移动部32、32向彼此远离的方向移动来解除移动部32、32重叠的状态。
[0260]
如以上那样,根据第二变形例所涉及的摄影测量用摄影装置1b,例如如图8所示那样在拍摄的对象物小从而需要去除某些支柱31和移动部32的情况下,能够通过使相邻的支柱31、31以及移动部32、32重叠而形成为一体来应对。因此,与拆下支柱31和移动部32相比更容易地进行作业。
[0261]
此外,虽然省略详细说明,但是第二变形例所涉及的摄影测量用摄影装置1b的连
接构件315、325也能够应用于第一变形例所涉及的摄影测量用摄影装置1a。
[0262]
[第三变形例]
[0263]
接着,参照图12来说明第三变形例所涉及的摄影测量用摄影装置1c。
[0264]
图12是对第三变形例所涉及的摄影测量用摄影装置1c的移动部32a进行说明的图。
[0265]
此外,在下面的说明中,对与本实施方式所涉及的摄影测量用摄影装置1不同的部分进行说明,对相同的部分标注相同的标记来进行说明。
[0266]
第三变形例所涉及的摄影测量用摄影装置1c是移动部32a能够在支柱31的移动方向上进行伸缩的构造。移动部32a例如是嵌套式的多级滑动轨道。移动部32a通过在移动方向上进行伸缩,能够变更支柱31移动的路径的长度,能够变更支柱31的移动范围。
[0267]
第三变形例所涉及的摄影测量用摄影装置1c具有下面的结构。
[0268]
(13)移动部32a能够变更支柱31移动的路径的长度。
[0269]
当像这样构成时,能够通过根据对象物的大小来变更移动部32a的长度,由此变更支柱31的移动范围。例如,在对象物小的情况下,能够使移动部32a向接近对象物的方向变短,来使支柱31的移动范围变窄。由此,能够使摄影测量用摄影装置1c的大小为小型。
[0270]
此外,虽然省略详细说明,但是第三变形例所涉及的摄影测量用摄影装置1c的移动部32a也能够应用于第一变形例所涉及的摄影测量用摄影装置1a以及第二变形例所涉及的摄影测量用摄影装置1b。
[0271]
[造型系统4]
[0272]
图13是对本实施方式所涉及的造型系统4进行说明的图。
[0273]
造型系统4是进行立体的对象物的形状和颜色的读取、以及立体造型物的造型的系统,由3d扫描器5、控制pc 6以及造型装置7构成。此外,“对象物”是造型系统4中用作形状和颜色的读取对象的立体物。“立体造型物”是利用造型系统4造型出的立体物。此外,造型装置7也可以应用造型装置2(参照图5)。
[0274]
3d扫描器5读取对象物的立体的形状来生成三维数据。控制pc 6将三维数据变换为用于控制造型装置7的控制程序。造型装置7基于控制程序来执行立体造型物的造型。
[0275]
3d扫描器5与控制pc 6以能够通信的方式连接。控制pc 6与造型装置7以能够通信的方式连接。
[0276]
在造型系统4中,3d扫描器5、控制pc 6以及造型装置7分别构成为独立的装置。此外,也可以是,在造型系统4中,这些3d扫描器5、控制pc 6以及造型装置7通过一台装置来构成。
[0277]
[造型装置]
[0278]
图14是造型装置7的概要结构图。
[0279]
作为造型装置7,能够优选使用公知的造型装置。例如,列举将多种颜色的墨用作造型的材料来利用层叠造型法对立体造型物进行造型的造型装置(3d打印机)。造型装置7例如从喷墨头喷出各种颜色的墨,来造型出被全彩着色的立体造型物。此外,层叠造型法例如是将多个层进行重叠来对立体造型物进行造型的方法。
[0280]
如图14所示,造型装置7具有头部71、造型台72、扫描驱动部73以及控制部74。
[0281]
头部71是喷出立体造型物80的材料的部分。作为立体造型物80的材料,列举墨。具
体地说,墨是从喷墨头喷出的液体。
[0282]
头部71从多个喷墨头喷出在规定的条件下固化的墨来作为立体造型物80的材料。而且,通过使着落后的墨固化,来重叠地形成构成立体造型物80的各层,利用层叠造型法造型出立体造型物80。另外,在本例中,作为墨,使用通过紫外线的照射而从液体状态固化的紫外线固化型墨(uv墨)。
[0283]
另外,头部71除了立体造型物80的材料以外还喷出支撑层82的材料。造型装置7根据需要在立体造型物80的周围形成支撑层82。支撑层82例如是通过包围正在造型的立体造型物80的外周来对立体造型物80进行支撑的层叠构造物。支撑层82在进行立体造型物80的造型时根据需要而形成,并在造型完成后被去除。
[0284]
造型台72是对正在造型的立体造型物80进行支撑的台状构件,配设在与头部71中的喷墨头相向的位置,在造型台72的上表面载置正在造型的立体造型物80。另外,在本例中,造型台72具有至少上表面能够在层叠方向(图中的z方向)上移动的结构,通过被扫描驱动部73驱动,至少使上表面根据立体造型物80的造型的进展进行移动。在该情况下,层叠方向例如是层叠造型法中造型的材料层叠的方向。另外,更具体地说,在本例中,层叠方向是与主扫描方向(图中的y方向)以及副扫描方向(图中的x方向)正交的方向。
[0285]
扫描驱动部73是使头部71进行相对于正在造型的立体造型物80相对地移动的扫描动作的驱动部。在该情况下,相对于正在造型的立体造型物80相对地移动例如是相对于造型台72相对地移动。另外,使头部71进行扫描动作例如是使头部71具有的喷墨头进行扫描动作。另外,在本例中,扫描驱动部73使头部71进行主扫描动作(y扫描)、副扫描动作(x扫描)以及层叠方向扫描(z扫描)。
[0286]
主扫描动作是一边向主扫描方向移动一边喷出墨的动作。扫描驱动部73将造型台72的在主扫描方向上的位置固定并使头部71侧移动,由此使头部71进行主扫描动作。另外,也可以是,扫描驱动部73将头部71的在主扫描方向上的位置固定并使造型台72移动,由此使立体造型物80侧移动。
[0287]
副扫描动作是相对于造型台72向与主扫描方向正交的副扫描方向相对地移动的动作。副扫描动作是相对于造型台72向副扫描方向相对地移动预先设定的进给量的动作。
[0288]
扫描驱动部73在主扫描动作的间隙,将头部71的在副扫描方向上的位置固定并使造型台72移动,由此使头部71进行副扫描动作。此外,也可以是,扫描驱动部73将造型台72的在副扫描方向上的位置固定并使头部71移动,由此使头部71进行副扫描动作。
[0289]
层叠方向扫描是通过使头部71和造型台72中的至少一方向层叠方向移动来使头部71相对于立体造型物80相对地向层叠方向移动的动作。
[0290]
扫描驱动部73根据造型的动作的进展使头部71进行层叠方向扫描,由此在层叠方向上调整喷墨头相对于正在造型的立体造型物80的相对位置。
[0291]
扫描驱动部73将头部71的在层叠方向上的位置固定,使造型台72移动。也可以是,扫描驱动部73将造型台72的在层叠方向上的位置固定,使头部71移动。
[0292]
图15是对造型装置7中的头部71进行说明的图。
[0293]
头部71具有多个喷墨头、多个紫外线光源710以及展平辊712。
[0294]
头部71具有作为多个喷墨头的喷墨头711s、喷墨头711mo、喷墨头711w、喷墨头711y、喷墨头711m、喷墨头711c、喷墨头711k以及喷墨头711t。
[0295]
这些多个喷墨头以副扫描方向上的位置一致的方式沿主扫描方向排列配设。另外,各个喷墨头在与造型台72相向的面具有多个喷嘴在规定的喷嘴列方向上排列的喷嘴列。喷嘴列方向是与副扫描方向平行的方向。
[0296]
喷墨头711s是喷出支撑层82的材料的喷墨头。作为支撑层82的材料,能够优选使用支撑层用的公知的材料。喷墨头711是喷出造型材料墨(mo墨)的喷墨头。造型材料墨是立体造型物80的内部(内部区域)的造型中使用的造型专用墨。
[0297]
此外,对于立体造型物80的内部,不限于造型材料墨,还可以使用其它颜色的墨来形成。另外,也考虑不使用造型材料墨而仅利用其它颜色的墨(例如白色的墨等)来形成立体造型物80的内部。在该情况下,在头部71中也可以省略喷墨头711mo。
[0298]
喷墨头711w是喷出白色(w色)的墨的喷墨头。白色的墨是光反射性的墨的一例,例如在形成立体造型物80中具有反射光的性质的区域(光反射区域)的情况下使用。
[0299]
喷墨头711y、喷墨头711m、喷墨头711c、喷墨头711k(下面称为喷墨头711y~711k)是在进行被着色的立体造型物80的造型时使用的着色用的喷墨头。
[0300]
喷墨头711y喷出黄色(y色)的墨。喷墨头711m喷出品红色(m色)的墨。喷墨头711c喷出青色(c色)的墨。喷墨头711k喷出黑色(k色)的墨。
[0301]
ymck的各种颜色是基于减法混色法的全彩表现中使用的原色(process color)的一例。这些各种颜色的墨是着色用的有色材料的一例。
[0302]
喷墨头711t是喷出透明墨的喷墨头。透明墨例如是无色的透明色(t)即透明颜色的墨。
[0303]
多个紫外线光源710是用于使墨固化的光源(uv光源),产生使紫外线固化型墨固化的紫外线。多个紫外线光源710的各个紫外线光源710以隔着喷墨头的排列的方式分别配设于头部71的主扫描方向上的一端侧和另一端侧。作为紫外线光源710,例如能够优选使用uvled(紫外led)等。另外,作为紫外线光源710,也考虑使用金属卤化物灯、水银灯等。
[0304]
展平辊712是用于使在立体造型物80的造型期间形成的墨层平展的展平单元。展平辊712例如在主扫描动作时与墨层的表面接触来去除固化前的墨的一部分,由此使墨层平展。
[0305]
通过使用以上那样的结构的头部71,能够适当地形成构成立体造型物80的墨层。另外,通过重叠地形成多个墨层,能够适当地对立体造型物80进行造型。
[0306]
此外,头部71还可以具有作为着色用的喷墨头的上述以外的颜色用的喷墨头。另外,关于头部71中的多个喷墨头的排列方式,也能够进行各种变形。例如,也可以使一部分喷墨头的在副扫描方向上的位置与其它喷墨头的在副扫描方向上的位置错开(例如设为交错排列)。
[0307]
图16是对利用造型装置7造型出的立体造型物80进行说明的图。此外,在图16中,是将立体造型物80用垂直于z方向的x-y平面切断得到的截面的示意图。
[0308]
另外,关于对表面被着色的立体造型物80进行造型的情况,立体造型物80的表面被着色例如是立体造型物80中能够从外部确认色彩的区域的至少一部分被着色。
[0309]
而且,造型装置7对具有内部区域801、光反射区域802、隔离区域803、着色区域804以及保护区域805的立体造型物80进行造型。
[0310]
内部区域801是构成立体造型物80的内部的区域。另外,关于内部区域801,例如也
能够考虑为构成立体造型物80的形状的区域(造型区域)。在本例中,头部71使用从喷墨头711mo喷出的造型材料墨来形成内部区域801。
[0311]
光反射区域802是用于使从立体造型物80的外侧经由着色区域804等入射的光反射的区域。头部71使用从喷墨头711w喷出的白色的墨来在内部区域801的周围形成光反射区域802。
[0312]
隔离区域803是用于防止构成光反射区域802的墨与构成着色区域804的墨混杂在一起的透明的区域(透明层)。在本例中,头部71使用从喷墨头711t喷出的透明墨来在光反射区域802的周围形成隔离区域803。
[0313]
着色区域804是利用从喷墨头711y~711k喷出的着色用的墨进行着色的区域。在该情况下,着色用的墨是着色用的材料的一例。在本例中,头部71使用从喷墨头711y~711k喷出的着色用的墨和从喷墨头711t喷出的透明墨来在隔离区域803的周围形成着色区域804。另外,由此使着色区域804形成在内部区域801等的外侧。另外,在该情况下,例如通过调整向各位置喷出各种颜色的着色用的墨的喷出量,来表现各种各样的颜色。另外,为了将由于颜色的不同而产生的着色用的墨的量(每单位体积的喷出量为0%~100%)的变化补偿为固定的100%,而使用透明墨。由此,能够利用期望的颜色来适当地对着色区域158的各位置进行着色。
[0314]
保护区域805是用于对立体造型物80的外表面进行保护的透明的区域(外侧透明区域)。在本例中,头部71使用从喷墨头711t喷出的透明墨来在着色区域804的周围形成保护区域805。另外,由此,头部71使用透明的材料以覆盖着色区域804的外侧的方式形成保护区域805。通过如以上那样形成各区域,能够适当地形成表面被着色的立体造型物80。
[0315]
此外,作为立体造型物80的结构的变形例,也可以不对内部区域801与光反射区域802进行区分,例如使用白色的墨来形成兼具光反射区域802的功能的内部区域801。另外,也可以省略隔离区域803、着色区域804等。
[0316]
控制部74是造型装置7具备的cpu。控制部74通过对造型装置7的各部分进行控制,来控制立体造型物80的造型的动作。
[0317]
控制部74基于从控制pc 6接收的控制程序,来控制造型装置7的各部分。
[0318]
[控制pc]
[0319]
图17是控制pc 6的功能框图。
[0320]
图17是为了说明功能上的特征而将控制pc 6的各种功能划分成块来示出的图。因此,各块未必一定对应了控制pc 6中的物理结构(例如电子电路的单元等)。
[0321]
控制pc 6具有数据输入部61、数据输出部62、显示部63以及数据处理部64。
[0322]
数据输入部61受理从3d扫描器5等位于控制pc 6的外部的装置提供的三维数据的输入。数据输入部61例如经由因特网等通信路径、存储卡等存储介质来受理三维数据的输入。
[0323]
数据处理部64进行将从3d扫描器5接收到的三维数据变换为用于控制造型装置7的信息的处理。具体地说,数据处理部64将三维数据变换为对喷墨打印机进行控制的控制程序。
[0324]
数据输出部62将由数据处理部64制作出的控制程序输出到造型装置7。数据输出部62例如经由通信路径、存储介质将控制程序输出到造型装置7。
[0325]
由此,3d扫描器5所生成的三维数据被控制pc 6变换为规定的形式后供给到造型装置7。
[0326]
[3d扫描器]
[0327]
下面,对使用本实施方式所涉及的3d扫描器5进行的三维数据的生成进行说明。
[0328]
3d扫描器5是三维数据生成装置的一例,对对象物进行摄像(拍摄)并进行对象物的立体形状和颜色的读取。关于3d扫描器5,例如也能够考虑为三维数据生成系统的一例等。此外,“对象物的颜色”是对象物的表面的颜色。“对象物的表面”是对象物中能够从外部确认色彩的区域。另外,作为三维数据,例如能够优选使用与作为表示立体造型物的数据使用的公知的数据相同或同样的形式的数据。
[0329]
如图13所示,3d扫描器5具有摄影部50和三维数据生成部51。摄影部50是从多个视点拍摄对象物来获取对象物的多个图像(摄像机图像)的装置。三维数据生成部51基于由摄影部50获取到的多个图像,来生成表示对象物的形状和颜色的三维数据。三维数据生成部51例如使用实施方式的摄影测量用摄影装置1中所说明的方法来进行三维数据的生成。在该情况下,关于摄影测量法,例如能够考虑为根据从多个观测点拍摄对象物所得到的二维图像分析视差信息来求出尺寸和形状的照相测量法的方法等。另外,作为三维数据生成部51,能够优选使用按照规定的程序来动作的计算机等。
[0330]
图18是对3d扫描器5的摄影部50进行说明的图。此外,在图18中,用虚拟线来表示对象物t。
[0331]
图19是对色靶9进行说明的图。(a)是示出色靶9相对于对象物t的配置的图。(b)是对色靶9的色块部302进行说明的图。(c)是对变形例所涉及的色靶9a进行说明的图。
[0332]
如图18所示,摄影部50具有载物台501、多个摄像机502、多个光源503、光源控制部504以及摄影控制部505。
[0333]
载物台501是用于设置对象物t的台。在载物台501上,除了设置对象物t以外,还设置色靶9来作为颜色样本(参照图19的(a))。关于色靶9在后面记述。
[0334]
多个摄像机502是拍摄对象物t的摄影装置。多个摄像机502在互不相同的位置设置有多个,由此从互不相同的视点拍摄对象物t。由此,获取从不同的视点观察到的对象物t的图像。在该情况下,多个摄像机502例如也可以应用所述的摄影测量用摄影装置1~1c(参照图7~图12)来配置。
[0335]
多个摄像机502通过以包围载物台501的周围的方式设置在水平面或铅垂方向上的互不相同的位置,来从互不相同的位置拍摄对象物t。
[0336]
多个摄像机502各自从包围设置在载物台501上的对象物t的周围的各位置拍摄对象物t。
[0337]
各个摄像机502以与由其它摄像机502获取的图像有至少一部分重叠的方式拍摄对象物t。在该情况下,由摄像机502获取的图像的至少一部分重叠是多个摄像机502的视场彼此重叠。
[0338]
多个摄像机502响应于摄影控制部505的控制来进行以光源503的调整为目的的摄影、以及用于进行最终的读取的拍摄(正式拍摄)。
[0339]
在此,“光源503的调整”是调整光量。“正式拍摄”是用于获取三维数据生成部51生成三维数据所使用的图像的拍摄。
[0340]
由摄像机502获取的图像是彩色图像。在该情况下,彩色图像例如是用多级的色调表现出与规定的基本色(例如rgb的各色)对应的颜色的成分的图像(例如全彩的图像)。另外,作为在正式拍摄中由摄像机502获取的多个图像,例如考虑使用与公知的3d扫描器等中使用的图像相同或同样的图像。公知的3d扫描器等中使用的图像例如是在利用摄影测量法等估计对象物的形状的情况下使用的多个图像。另外,在以光源503的调整为目的的拍摄时,也是通过多个摄像机502来获取与正式拍摄时相同的形式的图像。
[0341]
此外,在以光源503的调整为目的的拍摄时由多个摄像机502获取的图像的形式也可以与正式拍摄时不同。例如,考虑使图像的分辨率、摄像机502中的摄影条件的设定等不同。原因在于能够在适合于各个拍摄时的条件下进行拍摄。
[0342]
如图18所示,多个光源503是向对象物t照射光的照明装置。多个光源503各自响应于摄影控制部505的控制来向对象物t进行光的照射。作为多个光源503的各个光源503,能够优选使用公知的高演色光源(例如d50光源、或d65光源等)。
[0343]
光源控制部504对多个光源503的动作进行控制。光源控制部504基于通过以光源503的调整为目的的拍摄得到的图像,来决定表示正式拍摄时的光的照射方式的照射设定。另外,在正式拍摄时,基于照射设定来控制光源503的动作。
[0344]
摄影控制部505对多个摄像机502的动作进行控制。摄影控制部505使多个摄像机502进行以光源503的调整为目的的拍摄、以及用于进行最终的读取的正式拍摄。
[0345]
如图19的(a)所示,在摄影部50的载物台501(参照图18)上,除了设置有对象物t以外,还设置有色靶9。摄影部50拍摄对象物t所得到的多个图像是在对象物t的周围设置有色靶9的状态下获取到的图像等。
[0346]
在以光源503的调整为目的的拍摄时、以及用于进行最终的读取的正式拍摄时都如图19的(a)所示那样在将多个色靶9设置于对象物t的周围的状态下进行多个拍摄。
[0347]
多个色靶9各自设置在对象物t的周围的任意的位置。在该情况下,多个色靶9以包围对象物t的方式设置。另外,各个色靶9以被多个摄像机502(参照图18)中的某一个拍到的方式设置于摄影环境内的某一位置(例如环境背景、地板等)。
[0348]
由此,作为摄影部50获取到的多个图像,能够获取各个色靶9被拍进某图像中那样的多个图像。
[0349]
另外,考虑将多个色靶9中的至少一部分色靶9例如设置在对象物t中颜色重要的部分、颜色的视觉表现容易因打光的影响等发生变化的位置等。在该情况下,对象物t中颜色重要的部分例如是在进行表示对象物t的立体造型物的造型的情况下颜色的再现重要的部分。
[0350]
色靶9是表示预先设定的颜色的颜色样本的一例。作为色靶9,例如能够优选使用表示预先设定的多种颜色的比色图表(color chart)等。另外,作为这样的比色图表,能够优选使用与市面上销售的公知的比色图表相同或同样的比色图表等。另外,关于色靶9,例如能够考虑为表示规定的多种颜色的颜色样本等。
[0351]
另外,如图19的(b)所示,色靶9具有由表示互不相同的颜色的多个色块构成的色块部90。在该情况下,关于色块部90,例如也能够考虑为色靶9中构成比色图表的部分等。此外,在图19的(b)中,为了便于图示,关于9种颜色,利用斜线图案的不同来表现颜色的不同,由此示出了颜色互不相同的多个色块。关于色块部90,例如也能够考虑为色靶9中表示规定
的颜色的部分等。另外,作为比色图表,也可以使用表示更多的颜色的表。
[0352]
另外,也可以如图19的(c)所示那样设为还具有色块部90以外的结构的色靶9a。具体地说,色靶9a除了色块部90以外还具有多个标记95。多个标记95是用于识别色靶9的构件(标记部),被设置在色块部90的周围。
[0353]
多个标记95的各个标记95是表示是色靶9的识别部的一例。作为标记95,例如考虑使用与用于识别图像的公知的标记(图像识别用标记)相同或同样的标记。
[0354]
多个标记95各自具有规定的相同的形状,以使朝向互不相同的方式安装于四边形的色块部90的四角的各个角的位置。
[0355]
通过使用这样的标记95,能够将该标记95作为记号来高精度地适当地进行色靶9的检测。
[0356]
下面,进行利用摄像机502进行拍摄的定时的说明、色靶9的利用方式的说明等,对生成三维数据的动作进行说明。
[0357]
图20是示出生成三维数据的动作的一例的流程图。
[0358]
在通过3d扫描器5来生成三维数据的情况下,首先,摄影部50对对象物t(参照图19的(a))进行拍摄。作为对对象物t进行的拍摄,进行以光源503的调整为目的的拍摄、以及用于进行最终的读取的正式拍摄。
[0359]
如图20的流程图所示,首先,摄影部50中的摄影控制部505以光源503的调整为目的,使多个摄像机502进行对象物t的拍摄(调整用拍摄)(步骤s201)。此时由摄像机502获取的图像为用于调整光源503的光量的图像(下面称为光源调整用图像)。
[0360]
在该情况下,根据需要将步骤s201的动作重复进行多次。另外,在该情况下,在各次的步骤s201的动作中,光源控制部504基于事先设定的照明条件来使多个光源503照射光。
[0361]
在此,在初次执行的步骤s201中,将照明条件设定为预先设定的初始值。
[0362]
继步骤s201的动作之后,进行照明条件的调整(步骤s202)。光源控制部504基于步骤s201中获取到的光源调整用图像中拍到的色靶9的视觉表现,来检测向对象物t的打光。然后,根据需要使例如各个光源503照射的光的强度变化等,由此进行照明条件的调整,以使打光接近期望的状态。
[0363]
在步骤s202中进行了照明条件的调整之后,进行调整是否结束的判定(步骤s203),在判定为结束的情况下(步骤s203:“是”),进入下一步骤s204。
[0364]
例如,在判断为在步骤s201中设定了使向对象物t的打光成为期望的状态的照明条件的情况下,判定为照明条件的调整结束。具体地说,在步骤s201中进行的照明条件的调整量小于预先设定的上限值的情况下,判定为照明条件的调整结束。
[0365]
另外,例如在步骤s201中进行的照明条件的调整量大的情况下等,判定为照明条件的调整未完成(步骤s203:“否”),重复进行步骤s201以后的动作。另外,在该情况下,在第二次及以后执行的步骤s201中,关于照明条件,使用其前一次进行的步骤s202中的调整后的照明条件。
[0366]
由此,能够以使向对象物t的打光接近期望的状态的方式设定照明条件。
[0367]
此外,在步骤s201~s203的动作的重复次数达到了规定的上限次数的情况下,在步骤s203中判定为照明条件的调整结束。另外,在重复次数达到了上限次数的情况下,使生
成三维数据的动作中止,受理用户的指示。
[0368]
另外,当照明条件的调整结束时,进行在正式拍摄时使用的照射设定的决定(步骤s204)。照射设定是在正式拍摄时使多个光源503照射光的光的照射方式的设定。另外,在本例中,光源控制部504将与前一次进行的步骤s202中的调整后的照明条件对应的设定用作照射设定。由此,能够适当地决定针对对象物t以期望的状态照射光的照射设定。
[0369]
另外,在该情况下,关于光源控制部504中决定照射设定的动作,例如能够考虑为基于光源调整用图像中拍到的色靶9来决定照射设定的动作等。另外,在本例中,基于光源调整用图像中拍到的色靶9来决定照射设定是基于多个光源调整用图像中拍到的色靶9来决定表示多个光源503各自的光的照射方式的照射设定。由此,能够更适当地决定对对象物t的各部分更适当地照射光的照射设定。
[0370]
然后,在决定了照射设定之后,执行用于获取三维数据的生成中使用的图像的正式拍摄(三维数据生成用摄影)(步骤s205)。具体地说,在步骤s205中,光源控制部504基于步骤s204中决定出的照射设定,来使多个光源503向对象物t照射光。
[0371]
然后,在进行基于照射设定的光的照射的状态下,摄影控制部505使多个摄像机502拍摄对象物t。此时由摄像机502获取的图像为用于三维数据生成部51生成三维数据的图像(下面称为三维数据生成用图像)。
[0372]
另外,在本例中,在获取三维数据生成用图像时也使用色靶9。在该情况下,在多个色靶9被设置于对象物t的周围的状态(参照图19的(a))下,摄影控制部505使多个摄像机502从互不相同的多个视点拍摄对象物t,来获取多个三维数据生成用图像。另外,认为该情况下设置多个色靶9的位置与获取光源调整用图像时相同。由此,无需变更对象物t、多个色靶9的位置,能够继续适当地进行光源调整用图像的获取和三维数据生成用图像的获取。
[0373]
另外,在生成三维数据的动作的变形例中,也可以使设置多个色靶9的位置在获取光源调整用图像时与获取三维数据生成用图像时不同。由此,能够将多个色靶9设置在更适合于各个拍摄的目的的位置。
[0374]
另外,在获取三维数据生成用图像之后,三维数据生成部51基于由多个摄像机502获取到的多个三维数据生成用图像,来进行表示对象物t的形状和颜色的三维数据的生成(步骤s206)。另外,在本例中,三维数据生成部51基于三维数据生成用图像中拍到的色靶,来对三维数据生成用图像进行颜色的调整。在该情况下,对三维数据生成用图像进行颜色的调整例如是基于三维数据生成用图像中拍到的色靶9的颜色来进行调色等。由此,在生成三维数据时能够更适当地进行颜色的调整。另外,能够更高精度地更适当地进行三维数据的生成。
[0375]
像这样,摄影部50对对象物t的拍摄是在将色靶9设置于对象物t的周围的状态下进行的。通过使用此时获取的多个光源调整用图像,能够适当地检测向对象物t的打光。另外,通过基于该检测结果来调整照明条件,能够使向对象物t的打光接近期望的条件。因此,能够适当地调整获取三维数据生成用图像时的光的照射方式。另外,在生成三维数据时,能够更高精度地进行对象物t的颜色的检测,能够更高精度地适当地进行三维数据的生成。
[0376]
另外,在本例中,通过根据需要重复进行步骤s201~s203的动作,由此在获取光源调整用图像时,使多个光源503的光的照射方式不同并通过摄像机502来多次拍摄对象物t。具体地说,重复进行对象物t的拍摄和光的照射方式的调整,以在每次拍摄对象物t时,基于
光源调整用图像来调整光的照射方式。由此,能够更适当地决定接近期望的光的照射方式的照射设定。
[0377]
另外,在本例中,通过使用多个光源503,来从多个方向对对象物t照射光。另外,在获取三维数据生成用图像时,光源控制部504基于照射设定来使多个光源503向对象物t照射光。而且,在该情况下,通过基于照射设定来进行各个光源503的控制,能够使来自各个方向的光的照射方式进行各种各样的变化。因此,在获取三维数据生成用图像时,能够向对象物t适当地照射光。
[0378]
另外,在本例中,多个色靶9被设置在对象物t的周围的互不相同的位置。而且,在对象物t的周围的互不相同的位置设置有多个色靶9的状态下,摄影控制部505使多个摄像机502获取光源调整用图像的拍摄。由此,能够更适当地检测向对象物t的各种部位的打光。
[0379]
光源控制部504基于光源调整用图像中拍到的各个色靶9,来检测向对象物t的各部分的打光。而且,光源控制部504基于检测出的打光来决定照射设定。
[0380]
由此,能够适当地决定考虑了向对象物t的各部分的打光的照射设定。另外,能够在对对象物t的各部分更均匀地照射了光的状态下获取三维数据生成用图像。
[0381]
另外,关于照射设定,考虑决定为针对在获取光源调整用图像时光的照射不充分的部位(形成阴影的部分)照射更多的光。在该情况下,光源控制部504基于光源调整用图像中拍到的各个色靶9,来检测对象物t中的打光不足的部位。而且,光源控制部504以针对打光不足的部位照射比获取光源调整用图像时多的光的方式决定照射设定。由此,能够更适当地向对象物t照射光,因此能够获取适当的三维数据生成用图像。
[0382]
在此,在检测对象物t中的打光不足的部位的情况下,例如考虑使用光量计等。但是,有可能检测结果根据对象物t的颜色的不同而不同。
[0383]
例如,在向对象物t中呈黑色等收缩色的部分照射了光的情况下,即使适当地照射光,光量计也可能判定为光的照射不充分(形成了阴影)。与此相对地,色靶9能够在掌握是收缩色的情况下判定光量是否不足。因此,通过使用色靶9,能够获得比光量计可靠性高的检测结果。
[0384]
图21是对光源503进行说明的图。
[0385]
从多个光源503照射的光由光源控制部504(参照图18)来控制。在该情况下,作为光源503,优选使用容易进行光的照射的控制的结构。作为多个光源503的各个光源503,能够优选使用将多个led 503a排列而成的led阵列等。在该情况下,关于各个光源503,能够考虑为将多个led 503a排列而成的光源。
[0386]
通过使各个led 503a的发光强度变化,能够调整从光源503向对象物t照射的光的光量。另外,通过将多个光源503配设于不同的位置,能够使从多个方向的各个方向向对象物t照射的光的光量等进行各种各样的变化。
[0387]
由此,能够容易且适当地进行从各个光源503照射的光的调整等。
[0388]
另外,在将led阵列用作光源503的情况下,考虑以由多个led 503a构成的光源503为单位来进行光源控制部504对光源503的控制。由此,在使用大量的led 503a的情况下,也能够更容易地进行控制。另外,在以进行更详细的控制为目的等的情况下,也考虑由光源控制部504独立地控制构成led阵列的各个led 503a等。另外,在该情况下,关于各个led 503a,也能够考虑为一个光源503等。
[0389]
另外,作为多个光源503,例如考虑使用相同特性的光源。相同特性的光源例如是以相同的标准制造为相同的部件的光源。另外,关于向对象物t照射的光,在进行更多种多样的控制等的情况下,作为多个光源503的一部分,可以使用特性与其它光源503不同的光源。在该情况下,作为多个光源503,例如考虑使用演色性互不相同的多个光源等。具体地说,考虑使用第一演色性的光源503(例如d50光源)来作为摄影部50具有的多个光源503的一部分,使用第二演色性的光源503(例如d65光源)来作为多个光源503的另一部分等。由此,通过调整各个光源503的光的照射方式,能够使通过多个光源503得到的演色性进行各种各样的变化。另外,在获取三维数据生成用图像时,能够使向对象物t照射光的照射方式进行更多种多样的变化。
[0390]
接着,进行与上述所说明的各结构有关的补充说明、变形例的说明等。在本例中,基于光源调整用图像进行照明条件的调整,由此决定在获取三维数据生成用图像时使用的照射设定。而且,在该情况下,例如优选为决定与如下的照明条件对应的照射设定,该照明条件是以针对对象物t的各位置以固定的照度照射光的方式进行了调整后的照明条件。但是,难以使照度完全地均匀。另外,根据对象物t的形状等,即使在进行了照明条件的调整之后打光也会根据位置而存在差异。
[0391]
因此,在本例中,通过在获取三维数据生成用图像时还使用色靶9,由此在生成三维数据时根据需要来对三维数据生成用图像进行调色等颜色的调整(校正)。因此,能够基于三维数据生成用图像来更适当地读取对象物t的颜色,因此能够适当地生成更高精度地表示对象物t的颜色的三维数据。另外,即使三维数据生成用图像中的对象物t的一部分产生了阴影部分,也能够适当地进行用于去除其影响的颜色的调整等。
[0392]
另外,考虑如下情况等:在利用3d扫描器5读取对象物t的颜色的情况下,根据光源503的特性等,与其它环境(例如太阳光照射的环境)相比,颜色的视觉表现产生差异。因此,为了通过3d扫描器5高精度地读取颜色,优选的是识别是在什么样的环境下获取到的颜色并进行颜色的调整。另外,关于3d扫描器5的读取结果,例如在通过计算机的监视器等进行确认的情况下,也考虑颜色的视觉表现根据监视器的特性而产生差异。
[0393]
因此,在本例中,在将色靶9设置于对象物t的周围的状态下,通过摄像机502来拍摄对象物t,来获取三维数据生成用图像,并基于三维数据生成用图像中拍到的色靶来进行颜色的调整。由此,关于三维数据生成用图像中拍到的对象物t的各部分的颜色,能够识别是在什么样的环境下获取到的颜色。另外,也能够适当地进行用于去除环境因素的色彩管理等。并且,通过适当地进行色彩管理等,例如对计算机的监视器等上显示的颜色也能够适当地进行调整。
[0394]
另外,关于这种颜色的调整,考虑以使三维数据生成用图像中拍到的色靶9中的各颜色的色块部90(参照图19的(b))成为本来的颜色(原色)的方式进行调整。在该情况下,关于设置在对象物t的周围的多个色靶9,调整值根据来自多个光源503的打光的不同而不同。而且,关于对象物t的各部分的颜色,能够与某个色靶9(例如最接近的色靶9)的颜色的视觉表现相应地进行调整。另外,能够基于多个色靶9各自的颜色的视觉表现将每个位置(每个场所)的颜色的视觉表现的差异进行标准化,决定每个位置的校正量,由此进行颜色的调整。另外,对于阴影的部分,例如通过决定与阴影的强度相应的颜色的校正量,能够适当地去除阴影的影响。
[0395]
通过如上述那样进行颜色的调整,来适当地调整各个三维数据生成用图像中拍到的对象物t的各部分的颜色。
[0396]
另外,通过基于照射设定来进行多个光源503的控制,能够将从多个光源503照射光的照射方式作为已知的信息进行处理。而且,在该情况下,能够更容易且适当地进行如上所述的颜色的调整。
[0397]
另外,在获取光源调整用图像和三维数据生成用图像时,均通过多个摄像机502来获取多个图像。而且,在该情况下,关于获取的图像的数量,考虑将光源调整用图像的数量与三维数据生成用图像的数量设为相同。但是,在生成三维数据的动作的变形例中,关于获取的图像的数量,也可以使光源调整用图像的数量与三维数据生成用图像的数量不同。在该情况下,光源调整用图像的数量例如是在决定照射设定时实质使用的光源调整用图像的数量。另外,三维数据生成用图像的数量例如是在生成三维数据时实质使用的三维数据生成用图像的数量。
[0398]
另外,更具体地说,关于通过三维数据生成部51来生成三维数据的处理,能够考虑为进行多个图像处理等的处理。因此,当三维数据生成用图像的数量过多时,例如考虑到数据处理的负担变大从而处理花费很多时间等。与此相对地,关于通过光源控制部504来决定照射设定的处理,在光源调整用图像的数量多的情况下,也认为不容易产生问题。另外,在该情况下,也能够通过使光源调整用图像的数量更多来高精度地决定照射设定。因此,例如考虑使光源调整用图像的数量多于三维数据生成用图像的数量等。
[0399]
另外,在该情况下,在拍摄三维数据生成用图像时,光源控制部504例如使数量比获取光源调整用图像时少的摄像机502(例如摄影部50中的一部分摄像机502)进行拍摄。另外,在该情况下,在获取光源调整用图像时,光源控制部504使摄像机502获取从比获取三维数据生成用图像时多的多个视点进行拍摄的多个光源调整用图像。由此,能够防止生成三维数据的处理的负担(例如计算机的负荷)变大等,并能够更高精度地更适当地决定照射设定。另外,根据对照射设定要求的精度等,也考虑能够利用数量更少的光源调整用图像来适当地决定照射设定的情况。因此,在生成三维数据的动作的更进一步的变形例中,例如也考虑使光源调整用图像的数量少于三维数据生成用图像的数量等。
[0400]
如以上那样,本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0401]
(13)3d扫描器5生成三维数据,该三维数据是表示立体的对象物t的立体形状和颜色的数据。
[0402]
3d扫描器5具备:
[0403]
光源503,其向对象物t照射光;
[0404]
摄像机502,其拍摄对象物t;
[0405]
光源控制部504,其控制光源503的动作;
[0406]
摄影控制部505,其控制摄像机502的动作;以及
[0407]
三维数据生成部51,其基于由摄像机502拍摄到的对象物t的图像来生成三维数据。
[0408]
摄影控制部505使摄像机502拍摄对象物t,来获取光源调整用图像和三维数据生成用图像,
[0409]
该光源调整用图像是用于进行光源503的调整的图像,
[0410]
该三维数据生成用图像是用于三维数据生成部51生成三维数据的图像。
[0411]
至少在获取光源调整用图像时,在对象物t的周围设置表示预先设定的颜色的色靶9(颜色样本)。
[0412]
在色靶9被设置于对象物t的周围的状态下,摄影控制部505使摄像机502获取光源调整用图像。
[0413]
光源控制部504基于光源调整用图像中拍到的色靶9来决定照射设定,该照射设定是在获取三维数据生成用图像时使光源503照射光的光的照射方式。
[0414]
光源控制部504在获取三维数据生成用图像时,基于照射设定来使光源503向对象物t照射光。
[0415]
当像这样构成时,通过使用在色靶9被设置于对象物t的周围的状态下获取到的多个光源调整用图像,能够适当地检测光源503向对象物t的打光。另外,通过基于其检测结果来调整照明条件,能够使光源503向对象物t的打光接近期望的条件。
[0416]
因此,能够适当地调整获取三维数据生成用图像时的光的照射方式。另外,在生成三维数据时,能够更高精度地进行对象物t的颜色的检测,能够更高精度地适当地进行三维数据的生成。
[0417]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0418]
(14)在对象物t的周围的互不相同的位置设置有多个色靶9的状态下,摄影控制部505使摄像机502拍摄对象物t,来获取光源调整用图像。
[0419]
光源控制部504基于光源调整用图像中拍到的各个色靶9,来检测向对象物t的各部分的打光,基于检测出的打光来决定照射设定。
[0420]
当像这样构成时,能够设为考虑了向对象物t的各部分的打光的照射设定,因此能够在对对象物t的各部分均匀地照射光的状态下获取三维数据生成用图像。
[0421]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0422]
(15)光源控制部504基于光源调整用图像中拍到的各个色靶9,来检测对象物t中的打光不足的部位,以对打光不足的部位照射比获取光源调整用图像时更多的光的方式决定照射设定。
[0423]
当像这样构成时,能够在向对象物t适当地照射光的状态下获取三维数据生成用图像。
[0424]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0425]
(16)在获取光源调整用图像时,
[0426]
摄影控制部505使摄像机502从互不相同的多个视点拍摄对象物t,来获取多个光源调整用图像。
[0427]
光源控制部504基于多个光源调整用图像中拍到的色靶9来决定照射设定。
[0428]
当像这样构成时,能够适当地检测对象物t中的打光不足的部位等。
[0429]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0430]
(17)在获取三维数据生成用图像时,
[0431]
摄影控制部505使摄像机502从互不相同的多个视点拍摄对象物t,来获取多个三维数据生成用图像。
[0432]
在获取光源调整用图像时,
[0433]
摄影控制部505使摄像机502从比获取三维数据生成用图像时更多的多个视点拍摄对象物t,来获取多个光源调整用图像。
[0434]
当像这样构成时,能够防止生成三维数据的处理的负担变大等并能够适当地决定照射设定。
[0435]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0436]
(18)3d扫描器5具备多个光源503。
[0437]
光源控制部504基于光源调整用图像中拍到的色靶9,来决定表示多个光源503各自的光的照射方式的照射设定。
[0438]
在获取三维数据生成用图像时,光源控制部504基于所决定的照射设定,来使多个光源503向对象物t照射光。
[0439]
当像这样构成时,能够从多个方向对对象物t照射光。而且,通过进行各个光源503的控制,能够使来自各个方向的光的照射方式进行各种各样的变化。因此能够更适当地向对象物t照射光。
[0440]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0441]
(19)3d扫描器5具备演色性互不相同的多个光源503。
[0442]
当像这样构成时,通过调整各个光源503的光的照射方式,能够使通过多个光源503得到的演色性进行各种各样的变化。另外,在获取三维数据生成用图像时,能够使向对象物t照射光的照射方式进行更多种多样的变化。
[0443]
本实施方式所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0444]
(20)在获取三维数据生成用图像时也在对象物t的周围设置色靶9。
[0445]
在色靶9被设置于对象物t的周围的状态下,摄影控制部505使摄像机502拍摄对象物t,来获取三维数据生成用图像。
[0446]
三维数据生成部51基于三维数据生成用图像中拍到的色靶9,来对三维数据生成用图像进行颜色的调整。
[0447]
当像这样构成时,能够在生成三维数据时根据需要对三维数据生成用图像进行调色等颜色的调整(校正)。因此,能够基于三维数据生成用图像来更适当地读取对象物t的颜色。由此,能够适当地生成更高精度地表示对象物t的颜色的三维数据。
[0448]
另外,即使三维数据生成用图像中的对象物t的一部分产生了阴影部分,也能够适当地进行用于去除其影响的颜色的调整等。
[0449]
如以上那样,也能够特定为使用了本实施方式所涉及的3d扫描器5(三维数据生成装置)的造型系统4。
[0450]
即,
[0451]
(21)一种造型系统4,对立体造型物80(立体的造型物)进行造型,该造型系统4具备:
[0452]
3d扫描器5(三维数据生成装置),其生成三维数据,该三维数据是表示立体的对象物t的立体形状和颜色的数据;以及
[0453]
造型装置7,其基于三维数据来对立体造型物80进行造型。
[0454]
3d扫描器5具有:
[0455]
光源503,其向对象物t照射光;
[0456]
摄像机502,其拍摄对象物t;
[0457]
光源控制部504,其控制光源503的动作;
[0458]
摄影控制部505,其控制摄像机502的动作;以及
[0459]
三维数据生成部104,其基于由摄像机502拍摄到的图像来生成三维数据。
[0460]
摄影控制部505使摄像机502拍摄对象物t,来获取光源调整用图像和三维数据生成用图像,
[0461]
该光源调整用图像是用于进行光源503的调整的图像,
[0462]
该三维数据生成用图像是用于三维数据生成部51生成三维数据的图像。
[0463]
至少在获取光源调整用图像时在对象物t的周围设置表示预先设定的颜色的色靶9(颜色样本)。
[0464]
在色靶9被设置于对象物t的周围的状态下,摄影控制部505使摄像机502获取光源调整用图像。
[0465]
光源控制部504基于光源调整用图像中拍到的色靶9来决定照射设定,该照射设定是在获取三维数据生成用图像时使光源503照射光的光的照射方式。
[0466]
在获取三维数据生成用图像时,光源控制部504基于所决定的照射设定,来使光源503向对象物t照射光。
[0467]
当像这样构成时,通过使用在色靶9被设置于对象物t的周围的状态下进行拍摄而获取到的多个光源调整用图像,能够适当地检测进行拍摄时的向对象物t的打光。而且,通过基于检测结果来调整照明条件,能够使向对象物t的打光接近期望的条件。
[0468]
因而,在生成三维数据时,能够更高精度地适当地进行对象物t的颜色的检测,因此能够更高精度地适当地生成三维数据。
[0469]
因此,能够基于高精度地生成的三维数据来适当地对立体造型物进行造型。
[0470]
也能够特定为使用了本实施方式所涉及的3d扫描器5(三维数据生成装置)的三维数据的生成方法。
[0471]
即,
[0472]
(22)一种三维数据生成方法,用于生成三维数据,该三维数据是表示立体的对象物t的立体形状和颜色的数据,在该三维数据生成方法中使用以下部件:
[0473]
光源503,其向对象物t照射光;以及
[0474]
摄像机502,其拍摄对象物t。
[0475]
使摄像机502拍摄对象物t,来获取光源调整用图像和三维数据生成用图像,
[0476]
该光源调整用图像是用于进行光源503的调整的图像,
[0477]
该三维数据生成用图像是用于生成三维数据的图像。
[0478]
至少在获取光源调整用图像时在对象物t的周围设置表示预先设定的颜色的色靶9,来使摄像机502获取光源调整用图像。
[0479]
基于光源调整用图像中拍到的色靶9来决定照射设定,该照射设定是在获取三维数据生成用图像时使光源503照射光的光的照射方式。
[0480]
在获取三维数据生成用图像时,光源控制部504基于所决定的照射设定来使光源503向对象物t照射光。
[0481]
基于由摄像机502获取到的三维数据生成用图像来生成三维数据。
[0482]
当像这样构成时,通过使用在将色靶9设置于对象物t的周围的状态下拍摄到的多个光源调整用图像,能够适当地检测进行拍摄时的向对象物t的打光。而且,通过基于检测结果来调整照明条件,能够使向对象物t的打光接近期望的条件。
[0483]
因而,能够高精度地适当地进行对象物t的颜色的检测,因此能够更高精度地适当地生成三维数据。
[0484]
[变形例]
[0485]
另外,在上述说明中,关于使用色靶9的目的,主要说明了与光源503的控制、颜色的调整有关的目的等,但是并不限定于此。色靶9也能够还为了其它目的而使用。例如,能够将色靶9的至少一部分用作图像处理中的特征点。
[0486]“将色靶9的至少一部分用作特征点”例如是将色靶中表示规定的颜色的部分用作特征点。另外,“将色靶的至少一部分用作特征点”例如也可以是将表示规定的颜色的部分以外的部位用作特征点。
[0487]
例如,如图19的(c)所示,在使用具有标记95的色靶9的情况下,能够将标记95利用为特征点。此外,也可以仅将多个标记95中的一部分标记95用作特征点。
[0488]
三维数据生成部51将三维数据生成用图像中拍到的色靶9的至少一部分用作特征点,来对多个三维数据生成用图像进行图像处理。具体地说,在三维数据生成部51中,通过将色靶9利用为特征点,来识别多个三维数据生成用图像中的共同部分。由此,能够更高精度地更适当地进行三维数据的生成。
[0489]
变形例所涉及的3d扫描器5(三维数据生成装置)具有下面的结构。
[0490]
(23)在获取三维数据生成用图像时,也在对象物t的周围设置有色靶9。
[0491]
在色靶9被设置于对象物t的周围的状态下,摄影控制部505使摄像机502从互不相同的多个视点拍摄对象物t,来获取多个三维数据生成用图像。
[0492]
三维数据生成部51将三维数据生成用图像中拍到的色靶104的至少一部分用作特征点来对多个三维数据生成用图像进行图像处理,从而生成三维数据。
[0493]
当像这样构成时,能够更高精度地适当地进行三维数据的生成。
[0494]
(其它实施方式)
[0495]
上述的方式是本发明的优选的方式的一例,但是并不限定于此,在本发明的技术范围内能够进行各种变形实施。
[0496]
在拍摄光源调整用图像和三维数据生成用图像时使用的色靶9是表示预先设定的颜色的颜色样本的一例。而且,作为色靶9,例如能够优选使用与市面上销售的公知的比色图表相同或同样的比色图表等。另外,在生成三维数据的动作的变形例中,例如也可以使用与对象物t相应地制作出的颜色样本(例如表示与对象物t相应的颜色的颜色样本)等。另外,作为这种颜色样本,例如能够优选使用表示对象物t中特别重要的部分的颜色的颜色样本等。另外,作为颜色样本,能够优选使用表示多种颜色的比色图表等。
[0497]
另外,说明了将3d扫描器5生成的三维数据主要用于立体造型物的造型的情况,但是并不限定于此。例如,考虑到用于生成表示对象物t的计算机图形图像(cg图像)的用途等。
[0498]
附图标记说明
[0499]
1~1c:摄影测量用摄影装置;2:造型装置;4:造型系统;5:3d扫描器;6:控制pc;7:造型装置;9:色靶;10:摄影设备;101:摄像部;102:一级存储部;103:信号输出部;11:控制装置;111:控制部;112:二级存储部;12:显示装置;121:显示控制部;122:显示部;31:支柱;32:移动部;33:导轨;34:连结部;35:竿状部;36:主要部分;50:摄影部;501:载物台;502:摄像机;503:光源;504:光源控制部;505:摄影控制部;51:三维数据生成部;61:数据输入部;62:数据输出部;63:显示部;64:数据处理部;71:头部;72:造型台;73:扫描驱动部;74:控制部;80:立体造型物;90:色块部;95:标记;s:造型物套装;t:对象物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
