1.本发明涉及交流旋转电机的控制装置及电动助力转向装置。
背景技术:
2.在控制交流旋转电机时,希望减小叠加在输出转矩上的转矩纹波分量。在专利文献1的技术中,如专利文献1的段落0033、图2和段落0041等所述那样,即使将基波的交流电压施加到绕组,由于磁饱和引起的空间高次谐波,绕组电流从基波失真,由于电流的失真而产生转矩纹波分量,因此构成为将用于使基波电流流过绕组的高次谐波的校正电压vdh、vqh叠加到电压指令。
3.此外,在专利文献2的技术中,如专利文献2的图2等所示那样,基于电流反馈控制的p控制值pfbq计算用于校正q轴电压指令值gfbq的q轴校正值wfbq。在专利文献2的段落0056中,记载了q轴校正值wfbq成为q轴电流检测值的相反相位,并且在专利文献2的图9(a)、(b)中,可以确认成为相反相位。此外,在专利文献2的段落0058中,记载了q轴校正值wfbq是为了抑制q轴电流的纹波而与通常的反馈控制分开执行的用于纹波抑制的反馈控制。现有技术文献专利文献
4.专利文献1:日本专利特开2016-111788号公报专利文献2:日本专利特开2017-17899号公报
技术实现要素:
发明所要解决的技术问题
5.专利文献1和专利文献2的技术构成为通过在电压指令值上叠加校正电压来抑制电流的失真或振动。然而,在交流旋转电机中,若抑制电流的失真或振动,则转矩纹波分量未必得到抑制。在交流旋转电机中,由于磁饱和引起的空间高次谐波等,转矩常数(转矩与电流之比)有时会随着磁极位置而变动。特别是在针对转矩常数的变动对策不足的廉价交流旋转电机中,这种倾向变大。由于该转矩常数的变动,转矩纹波分量叠加在输出转矩上。此外,由转矩常数的变动引起的转矩纹波分量在电流检测值中没有体现。因此,为了抵消转矩纹波分量,需要将用于抵消转矩纹波分量的电流振动分量以前馈方式叠加在绕组电流上。
6.然而,由于转矩纹波分量是磁极位置的旋转频率的高次谐波分量(例如,6阶),因此转矩纹波分量的频率随着转子(磁极位置)的旋转角速度的增加而增加。因此,即使使抵消电流振动分量叠加在电流指令值上,若旋转角速度变高,则电流振动分量的频率也会变得高于电流反馈控制的截止频率,从而使得实际绕组电流不能跟随电流指令值的电流振动分量。因此,在使抵消电流振动分量叠加在电流指令值上的方法中,若变为高旋转区域,则存在抵消电流振动分量不能叠加在绕组电流上,从而无法抵消转矩纹波分量的问题。
7.另外,由于交流旋转电机是一种电感负载,在交流旋转电机旋转时,q轴电流与q轴电压之间存在相位偏移。因此,如专利文献2所示,如果将q轴校正电压的相位设定为与q轴电流的相位相同的转矩纹波分量的相反相位,则不能高精度地抵消转矩纹波分量。
8.希望得到一种交流旋转电机的控制装置和电动助力转向装置,能够使用于抵消转矩纹波分量的抵消电流以前馈方式叠加在绕组电流上,从而能够抵消转矩纹波分量。用于解决技术问题的技术手段
9.本技术所涉及的交流旋转电机的控制装置是经由逆变器控制具有设置有绕组的定子和转子的交流旋转电机的交流旋转电机的控制装置,包括:磁极位置检测部,该磁极位置检测部检测所述转子的磁极位置;基本电压指令值计算部,该基本电压指令值计算部在dq轴的旋转坐标系上计算d轴的基本电压指令值和q轴的基本电压指令值,所述dq轴的旋转坐标系由在检测到的所述磁极位置的方向上确定的所述d轴和在与所述d轴相比提前90
°
电角度的方向上确定的所述q轴构成;振动电压指令值计算部,该振动电压指令值计算部计算所述q轴的振动电压指令值,所述q轴的振动电压指令值具有与叠加在所述转子的输出转矩上的转矩纹波分量相同的频率,且用于抵消所述转矩纹波分量;以及开关控制部,该开关控制部基于所述d轴的基本电压指令值、以及将所述q轴的振动电压指令值叠加到所述q轴的基本电压指令值而得到的所述q轴的电压指令值,来对所述逆变器具有的多个开关元件进行导通关断控制,所述振动电压指令值计算部基于流过所述绕组的电流信息和所述磁极位置计算所述转矩纹波分量的相反相位,计算所述q轴的振动电压指令值的周期中与实际电流相对于所述q轴的振动电压指令值的相位延迟相对应的校正相位,将所述q轴的振动电压指令值的相位设定为使所述转矩纹波分量的所述相反相位提前所述校正相位后的相位。
10.本发明所涉及的电动助力转向装置具备上述交流旋转电机的控制装置、以及成为车辆的转向装置的驱动力源的所述交流旋转电机。发明效果
11.根据本发明所涉及的交流旋转电机的控制装置或电动助力转向装置,由于用于抵消转矩纹波分量的q轴振动电压指令值叠加在q轴电压指令值上,所以用于抵消转矩纹波分量的抵消电流以前馈的方式叠加在绕组电流上。此外,由于基于流过绕组的电流信息和磁极位置来计算转矩纹波分量的相反相位,因此可以高精度地计算以根据绕组电流而变化的磁极位置为基准的转矩纹波分量的相位及其相反相位。并且,计算与实际电流相对于q轴振动电压指令值的相位延迟相对应的校正相位,并且将q轴振动电压指令值的相位设定为使转矩纹波分量的相反相位提前校正相位后的相位。因此,能够计算对电压指令值与绕组电流和转矩纹波分量之间的相位偏移进行补偿后的q轴振动电压指令值,高精度地抵消转矩纹波分量。
附图说明
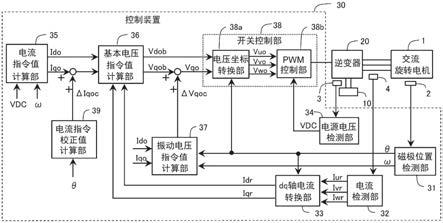
12.图1是实施方式1所涉及的交流旋转电机及控制装置的简要结构图。图2是实施方式1所涉及的交流旋转电机的控制装置的简要框图。
图3是实施方式1所涉及的交流旋转电机的控制装置的硬件结构图。图4是用于说明实施方式1所涉及的理论提前相位及校正相位的图。图5是实施方式1所涉及的振动电压指令值计算部的框图。图6是说明实施方式1所涉及的q轴交链磁通与q轴电流之间的关系的图。图7是说明实施方式1所涉及的q轴电流与q轴电感值之间的关系的图。图8是实施方式2所涉及的振动电压指令值计算部的框图。图9是实施方式3的比较例所涉及的时序图。图10是实施方式3所涉及的时序图。图11是实施方式3所涉及的时序图。图12是实施方式4所涉及的电动助力转向装置的简要结构图。
具体实施方式
13.1.实施方式1参照附图说明实施方式1所涉及的交流旋转电机的控制装置30(以下,简称为控制装置30)。图1是本实施方式所涉及的交流旋转电机1、逆变器20及控制装置30的简要结构图。
14.1-1.交流旋转电机交流旋转电机1设为具有设置有多相绕组的定子和转子的同步交流旋转电机。本实施方式中,在定子设有u相、v相和w相三相绕组cu、cv和cw。三相绕组cu、cv、cw采用星形接线。另外,三相绕组也可以是三角形接线。在由电磁钢板构成的转子上设置永磁体,交流旋转电机1设为永磁体型同步交流旋转电机。
15.交流旋转电机1具备输出与转子的旋转角度相对应的电信号的旋转传感器2。旋转传感器2是霍尔元件、编码器、或旋转变压器等。旋转传感器2的输出信号被输入到控制装置30。
16.1-2.逆变器等逆变器20是在直流电源10和三相绕组之间进行功率转换的功率转换装置,具有多个开关元件。逆变器20与三相各相的绕组相对应地设置有3组串联电路(腿),该串联电路串联连接有与直流电源10的正极侧相连接的正极侧开关元件23h(上臂)、以及与直流电源10的负极侧相连接的负极侧开关元件23l(下臂)。逆变器20具备总共六个开关元件,即三个正极侧开关元件23h和三个负极侧开关元件23l。正极侧开关元件23h和负极侧开关元件23l串联连接的连接点连接到对应的相的绕组。
17.具体而言,在各相的串联电路中,正极侧开关元件23h的集电极端子与正极侧电线25连接,正极侧开关元件23h的发射极端子与负极侧开关元件23l的集电极端子连接,负极侧开关元件23l的发射极端子与负极侧电线26连接。正极侧开关元件23h和负极侧开关元件23l的连接点连接到对应的相的绕组。开关元件使用反向并联连接有二极管22的igbt(insulated gate bipolar transistor:绝缘栅双极型晶体管)、具有反向并联连接的二极管的功能的mosfet(metal oxide semiconductor field effect transistor:金属氧化物半导体场效应晶体管)等。各开关元件的栅极端子连接到控制装置30。各开关元件通过从控制装置30输出的控制信号进行导通或关断。
18.平滑电容器24连接在正极侧电线25和负极侧电线26之间。设置有电源电压传感器3,用于检测从直流电源10提供给逆变器20的电源电压vdc。电源电压传感器3连接在正极侧电线25和负极侧电线26之间。电源电压传感器3的输出信号被输入到控制装置30。
19.电流传感器4输出与流过各相绕组的电流相对应的电信号。电流传感器4设置在连接开关元件的串联电路与绕组的各相的电线上。电流传感器4的输出信号被输入到控制装置30。另外,电流传感器4也可以设置在各相的串联电路中。
20.直流电源10使用可充放电的蓄电装置(例如锂离子电池、镍氢电池、双电层电容器)。另外,直流电源10中可以设置有dc-dc转换器,该dc-dc转换器是对直流电压进行升压或降压的直流功率转换器。
21.1-3.控制装置30控制装置30经由逆变器20控制交流旋转电机1。如图2所示,控制装置30包括磁极位置检测部31、电流检测部32、dq轴电流转换部33、电源电压检测部34、电流指令值计算部35、基本电压指令值计算部36、振动电压指令值计算部37、开关控制部38、电流指令校正值计算部39等。控制装置30的各功能由控制装置30所具备的处理电路来实现。具体而言,控制装置30如图3所示,具备下述部分来作为处理电路,即:cpu(central processing unit:中央处理器)等运算处理装置90(计算机)、与运算处理装置90进行数据的交换的存储装置91、向运算处理装置90输入外部信号的输入电路92、以及从运算处理装置90向外部输出信号的输出电路93等。
22.作为运算处理装置90,可以具备asic(application specific integrated circuit:专用集成电路)、ic(integrated circuit:集成电路)、dsp(digital signal processor:数字信号处理器)、fpga(field programmable gate array:现场可编程门阵列)、各种逻辑电路和各种信号处理电路等。另外,作为运算处理装置90,也可以设置多个同种或不同种的运算处理装置来分担执行各处理。作为存储装置91,可以具备构成为能从运算处理装置90读取并写入数据的ram(random access memory:随机存取存储器)、构成为能从运算处理装置90读取数据的rom(read only memory:只读存储器)等。输入电路92连接有电源电压传感器3、电流传感器4、旋转传感器2等各种传感器和开关,并具备将这些传感器、开关的输出信号输入到运算处理装置90的a/d转换器等。输出电路93连接有对开关元件进行通断驱动的栅极驱动电路等电负载,并具备从运算处理装置90向这些电负载输出控制信号的驱动电路等。
23.于是,控制装置30所具备的图2的各控制部31~39等的各功能通过运算处理装置90执行rom等存储装置91所存储的软件(程序),并与存储装置91、输入电路92、以及输出电路93等控制装置30的其他硬件进行协作来实现。另外,各控制部31~39等使用的电流相位设定数据、校正相位设定数据、电感设定数据、绕组的电阻值r、阶数n、电感l等设定数据作为软件(程序)的一部分存储在rom等存储装置91中。以下,对控制装置30的各功能进行详细说明。
24.1-3-1.磁极位置检测部磁极位置检测部31检测电角度下的转子的磁极位置θ(转子的旋转角度θ)。本实施方式中,磁极位置检测部31基于旋转传感器2的输出信号检测转子的磁极位置θ(旋转角度θ)。本实施方式中,磁极位置被设定在设置于转子的永磁体的n极的方向上。此外,磁极位置
检测部31对磁极位置θ进行微分运算,计算电角度下的转子的磁极位置的旋转角速度ω。
25.另外,磁极位置检测部31可以被构成为:基于通过将高次谐波分量叠加在电流指令值上而获得的电流信息等来推定旋转角度(磁极位置)及旋转角速度,而不使用旋转传感器(所谓的无传感器方式)。
26.1-3-2.电流检测部电流检测部32检测流过三相各相的绕组的三相电流iur、ivr、iwr。本实施方式中,电流检测部32基于电流传感器4的输出信号,检测从逆变器20流向三相各相的绕组cu、cv、cw的三相电流iur、ivr、iwr。这里,iur是u相的电流检测值,ivr是v相的电流检测值,iwr是w相的电流检测值。
27.1-3-3.dq轴电流转换部dq轴电流转换部33将三相电流检测值iur、ivr、iwr转换为dq轴旋转坐标系上的d轴电流检测值idr和q轴电流检测值iqr。dq轴旋转坐标系是由在检测到的磁极位置θ的方向上确定的d轴和在与d轴相比提前90
°
电角度的方向上确定的q轴构成的双轴旋转坐标,并且与转子的磁极位置的旋转同步地旋转。具体地说,dq轴电流转换部33基于磁极位置θ进行三相两相转换和旋转坐标转换,将三相电流检测值iur、ivr、iwr转换为d轴电流检测值idr和q轴电流检测值iqr。
28.1-3-4.电源电压检测部电源电压检测部34检测从直流电源10供给到逆变器20的电源电压vdc。本实施方式中,电源电压检测部34基于电源电压传感器3的输出信号检测电源电压vdc。
29.1-3-5.电流指令值计算部电流指令值计算部35计算d轴电流指令值ido和q轴电流指令值iqo。在本实施方式中,电流指令值计算部35基于目标转矩、电源电压vdc和旋转角速度ω等,使用最大转矩电流控制、弱磁通控制和id=0控制等公知的电流矢量控制方法,计算d轴电流指令值ido和q轴电流指令值iqo。目标转矩可以从外部装置传递,或者可以在控制装置30内运算。
30.在本实施方式中,将后述的由电流指令校正值计算部39计算出的q轴振动电流指令值δiqoc叠加在q轴电流指令值iqo上,计算叠加后的电流指令值作为最终的q轴电流指令值iqo(iqo
←
iqo δiqc)。
31.1-3-6.基本电压指令值计算部基本电压指令值计算部36在dq轴旋转坐标系上计算d轴基本电压指令值vdob和q轴基本电压指令值vqob。
32.在本实施方式中,基本电压指令值计算部36构成为进行使d轴基本电压指令值vdob和q轴基本电压指令值vqob改变的电流反馈控制,以使得d轴电流检测值idr接近d轴电流指令值ido,并且q轴电流检测值iqr接近q轴电流指令值iqo。
33.例如,基本电压指令值计算部36基于d轴电流检测值idr与d轴电流指令值ido之间的d轴电流偏差以及q轴电流检测值iqr与q轴电流指令值iqo之间的q轴电流偏差,进行pi控制等控制运算,计算d轴基本电压指令值vdob和q轴基本电压指令值vqob。
34.1-3-7.开关控制部开关控制部38基于d轴基本电压指令值vdob,以及将后述的q轴振动电压指令值δvqoc叠加在q轴基本电压指令值vqob上而得到的q轴电压指令值vqo,对逆变器20具有的多
个开关元件进行导通关断控制。在本例中,q轴振动电压指令值δvqoc与q轴基本电压指令值vqob相加,从而计算q轴电压指令值vqo(vqo=vqob δvqoc)。
35.电压坐标转换部38a基于磁极位置θ对d轴基本电压指令值vdob和q轴电压指令值vqo进行固定坐标转换和两相三相转换,计算三相电压指令值vuo、vvo、vwo。
36.pwm控制部38b将三相电压指令值vuo、vvo、vwo分别与在载波频率下以0为中心且以电源电压vdc/2的振幅振动的载波(三角波)进行比较,当电压指令值超过载波时,使矩形脉冲波导通,当电压指令值低于载波时,使矩形脉冲波关断。pwm控制部40b向逆变器20输出与三相各相的矩形脉冲波相对应的控制信号,使逆变器20的各开关元件导通关断。此外,为了防止各相的正极侧开关元件和负极侧开关元件同时导通,可以在各相的正极侧开关元件的导通期间和负极侧开关元件的导通期间之间设置使正极侧开关元件和负极侧开关元件双方同时关断的短路防止时间(死区时间)。
37.1-3-8.振动电压指令值计算部《基于电流指令值的转矩纹波分量的抵消课题》在交流旋转电机中,由于磁饱和引起的空间高次谐波等,转矩常数(转矩与电流之比)有时会随着磁极位置θ而变动。特别是在针对转矩常数的变动对策不足的廉价交流旋转电机中,这种倾向变大。由于该转矩常数的变动,转矩纹波分量叠加在输出转矩上。此外,由转矩常数的变动引起的转矩纹波分量在电流检测值中没有体现。因此,为了抵消转矩纹波分量,需要将用于抵消转矩纹波分量的电流振动分量以前馈的方式叠加在绕组电流上。
38.然而,由于转矩纹波分量是磁极位置θ的旋转频率的高次谐波分量(例如,6阶),因此转矩纹波分量的频率随着转子(磁极位置)的旋转角速度的增加而增加。因此,即使使抵消电流振动分量叠加在电流指令值上,若旋转角速度变高,则电流振动分量的频率也会变得高于电流反馈控制的截止频率,从而使得实际绕组电流不能跟随电流指令值的电流振动分量。因此,在使抵消电流振动分量叠加在电流指令值上的方法中,若变为高旋转区域,则抵消电流振动分量不能叠加在绕组电流上,从而无法抵消转矩纹波分量。
39.《基于电压指令值的转矩纹波分量的抵消的理论说明》因此,在本实施方式中,构成为使抵销电压振动分量叠加在电流反馈控制的处理后的电压指令值上。若由此来构成,则能够使抵消电流振动分量叠加在绕组电流上,而不受电流反馈控制的截止频率的影响。但是,由于在电压指令值与绕组电流及转矩纹波分量之间存在相位及振幅的偏差,因此需要计算将该偏差考虑在内的抵消电压振动分量。以下,对用于此的理论进行说明。
40.交流旋转电机的转矩公式如下式所示。[数学式1]这里,t是转子的输出转矩,pm是极对数,ψ是交链磁通,ld是d轴电感,lq是q轴电感。
[0041]
由式(1)可知,输出转矩t根据q轴电流iq和d轴电流id而变化。通常,式(1)的右边第2项小于右边第1项,输出转矩t大致与q轴电流iq成比例变化。上述转矩纹波分量因交链磁通ψ根据磁极位置θ发生变动而产生,转矩常数大致为pm
·
ψ。
[0042]
若将转矩纹波分量的频率相对于磁极位置的旋转频率的阶数设为n,则转矩纹波
分量δt由下式表示。[数学式2]这里,trp0是转矩纹波分量的振幅,θrp0是转矩纹波分量相对于磁极位置θ的n倍值的相位。转矩纹波分量的相位θrp0不是磁极位置θ的旋转周期,而是转矩纹波分量周期中的相位。
[0043]
转矩纹波分量的振幅trp0和相位θrp0根据d轴电流id和q轴电流iq而变化,成为它们的函数。在d轴电流id和q轴电流iq的各动作点,通过电磁场分析或实际测量获得转矩纹波分量δt的波形,并确定振幅trp0与d轴电流id和q轴电流iq之间的关系特性、以及相位θrp0与d轴电流id和q轴电流iq之间的关系特性。
[0044]
用于抵消式(2)的转矩纹波分量δt的抵消q轴电流δiqc为下式。[数学式3]这里,iqrp0是抵消q轴电流δiqc的振幅,为转矩纹波分量的振幅trp0除以极对数pm和交链磁通ψ后得到的值。另外,式(3)的交链磁通ψ是不考虑与磁极位置相对应的变动的平均值。抵消q轴电流δiqc的相位成为转矩纹波分量δt的相反相位,振幅设为1/(pm
·
ψ)倍后的值。抵消q轴电流的振幅iqrp0也与转矩纹波分量的振幅trp0同样,根据d轴电流id和q轴电流iq而变化,并且成为它们的函数。
[0045]
接着说明从抵消q轴电流δiqc到电压指令值的转换。交流旋转电机的电压方程式如下式所示。[数学式4]这里,vd是d轴电压,vq是q轴电压,r是绕组的电阻值,ψa是永磁体的交链磁通,p是微分算子。
[0046]
若在式(4)的q轴电流iq上代入叠加了抵消q轴电流δiqc的q轴电流iq δiq,则得到下式。另外,为了抵消转矩纹波分量,d轴电流不变。[数学式5]
[0047]
若从式(5)中减去式(4),则得到将抵消q轴电流δiqc转换为抵消q轴电压δvqc和抵消d轴电压δvdc的下式。
[数学式6]
[0048]
在本实施方式中,抵消d轴电压δvdc的项(-ω
·
lq
·
δiq)被无视。若将式(3)代入式(6)的抵消q轴电压δvqc项,则得到下式。[数学式7]δvqc=iqrp0
·
{r
·
cos(n
·
θ-θrp0-π)-n
·
ω
·
lq
·
sin(n
·
θ-θrp0-π)}
···
(7)
[0049]
若通过三角函数的合成对式(7)进行变形,则表示为下式。[数学式8]这里,arctan为反正切函数。根据式(8),相对于式(3)的抵消q轴电流δiqc,抵消q轴电压δvqc成为振幅设为理论振幅增益βr倍、相位提前理论提前相位αr后的值。
[0050]
另外,理论提前相位ar是q轴电流iq相对于施加到绕组的q轴电压vq的相位延迟的符号反转值,变为正值。理论提前相位αr是所谓的阻抗角。此外,理论振幅增益βr是q轴电流iq相对于施加到绕组的q轴电压vq的振幅增益的倒数。如图4所示,随着磁极位置的旋转角速度ω从0增加,理论提前相位αr从0增加到90度(π/2)。
[0051]
《q轴振动电压指令值δvqoc的计算》因此,振动电压指令值计算部37计算q轴振动电压指令值δvqoc,该q轴振动电压指令值δvqoc具有与叠加在转子的输出转矩上的转矩纹波分量相同的频率,且用于抵消转矩纹波分量。振动电压指令值计算部37基于流过绕组的电流信息和磁极位置θ计算转矩纹波分量的相反相位,计算q轴振动电压指令值δvqoc的周期中与实际电流相对于q轴振动电压指令值δvqoc的相位延迟相对应的校正相位α,将q轴振动电压指令值δvqoc的相位设定为使转矩纹波分量的相反相位提前校正相位α后的相位。
[0052]
根据该结构,由于用于抵消转矩纹波分量的q轴振动电压指令值δvqoc叠加在q轴电压指令值vqo上,所以即使在高旋转区域也不会由于电流反馈控制的截止频率的影响而被截止,可以将抵消电流叠加在绕组电流上,可以抵消转矩纹波分量。
[0053]
此外,由于基于流过绕组的电流信息和磁极位置θ来计算转矩纹波分量的相反相位,因此可以高精度地计算以根据绕组电流而变化的磁极位置θ为基准的转矩纹波分量的相位及其相反相位。并且,计算与实际电流相对于q轴振动电压指令值δvqoc的相位延迟相对应的校正相位α,并且将q轴振动电压指令值δvqoc的相位设定为使转矩纹波分量的相反相位提前校正相位α后的相位。因此,能够计算对电压指令值与绕组电流和转矩纹波分量之间的相位偏移进行补偿后的q轴振动电压指令值δvqoc,高精度地抵消转矩纹波分量。
[0054]
在本实施方式中,振动电压指令值计算部37使用下式计算q轴振动电压指令值δ
vqoc。图5示出本实施方式所涉及的振动电压指令值计算部37的框图。[数学式9]δvqoc=β
·
iqrp0
·
cos(n
·
θ-θrp0-π α)
···
(9)在式(9)中,(n
·
θ-θrp0-π)成为转矩纹波分量的相反相位,α成为校正相位,(β
·
iqrp0)成为振幅。
[0055]
《转矩纹波分量的相反相位的计算》振动电压指令值计算部37如式(9)所示,从磁极位置θ和阶数n的乘法值中减去相对于磁极位置θ和阶数n的乘法值的转矩纹波分量的相位θrp0,并且减去(或加上)π(180度),计算转矩纹波分量的相反相位(n
·
θ-θrp0-π)。
[0056]
这里,振动电压指令值计算部37基于流过绕组的电流信息计算转矩纹波分量的相位θrp0。本实施方式中,振动电压指令值计算部37参照预先设定了d轴电流id和q轴电流iq与转矩纹波分量的相位θrp0之间的关系的电流相位设定数据,计算与当前的d轴电流指令值ido和q轴电流指令值iqo相对应的转矩纹波分量的相位θrp0。可以使用d轴电流检测值idr和q轴电流检测值iqr来代替d轴电流指令值ido和q轴电流指令值iqo。
[0057]
电流相位设定数据是映射数据或近似函数等。如上所述,通过电磁场分析或实际测量获得d轴电流id和q轴电流iq的各动作点的转矩纹波分量δt的波形,并且基于所获得的数据预先设定电流相位设定数据。
[0058]
《校正相位α的计算》本实施方式中,振动电压指令值计算部37使用与式(8)的第三式的理论提前相位αr的计算式相同的下式,基于转矩纹波分量的频率相对于磁极位置的旋转频率的阶数n、磁极位置的电角度下的旋转角速度ω、交流旋转电机的电感l和绕组的电阻值r来计算校正相位α。[数学式10]
[0059]
阶数n被设定为自然数的固定值,例如被设定为6(n=6)。绕组的电阻值r可以设定为固定值,也可以根据绕组温度等改变。
[0060]
在本实施方式中,电感l设为q轴电感lq。q轴电感lq可以设定为固定值,也可以如后述那样根据电流信息等改变。
[0061]
或者,振动电压指令值计算部37可以参照预先设定了旋转角速度ω和电感l(在本例中为q轴电感lq)与校正相位α之间的关系的校正相位设定数据,计算与当前的旋转角速度ω和当前的电感l相对应的校正相位α。或者,可以不考虑电感l的变化,振动电压指令值计算部37参照预先设定了旋转角速度ω与校正相位α之间的关系的校正相位设定数据,计算与当前的旋转角速度ω相对应的校正相位α。校正相位设定数据是基于式(10)或实验数据预先设定的。校正相位设定数据是映射数据或近似函数等。
[0062]
在任一情况下,振动电压指令值计算部37如图4所示那样,随着磁极位置的旋转角速度ω减小,使q轴振动电压指令值的周期中的校正相位α在从90度到0度的范围内下降。
[0063]
《根据电流的电感l的设定》
振动电压指令值计算部37可以参照预先设定了d轴电流和q轴电流与q轴电感lq之间的关系的电感设定数据,计算与当前的d轴和q轴电流指令值ido、iqo或当前的d轴和q轴电流检测值idr、iqr相对应的q轴电感lq。
[0064]
电感设定数据是基于通过电磁场分析或实际测量获得的数据而预先设定的。例如,在d轴电流和q轴电流的各动作点,计算交链磁通的变化δψ相对于q轴电流的变化δiq的倾斜度δψ/δiq,并且将倾斜度δψ/δiq设定为q轴电感lq。
[0065]
图6是在某个d轴电流id的动作点扫描q轴电流iq时q轴交链磁通ψq与q轴电流iq之间的关系特性的示例。该特性是通过电磁场分析或实际测量得到的。在图6中,iq=1.35[p.u.]附近的动作点被放大。在该动作点,求出q轴交链磁通相对于q轴电流iq的微小变化δiq的微小变化δψq,求出倾斜度δψ/δiq。接着,求出倾斜度δψ/δiq作为该动作点处的q轴电感lq。另外,在图6中,q轴交链磁通ψq通过设定为固定值的ψq1被无量纲化。
[0066]
图7是绘制了在各q轴电流iq的动作点处求出的q轴电感lq(倾斜度δψ/δiq)的图。q轴电感lq通过设定为固定值的l1而无量纲化。图6中放大后的iq=1.35[p.u.]处的q轴电感lq为2.5l1。iq=0.05[p.u.]处的q轴电感lq为7l1。iq=0.55[p.u.]处的q轴电感lq为5l1。在图7的示例中,q轴电感lq随着q轴电流iq增加而降低。这是因为q轴交链磁通ψq与q轴电流iq之间的关系特性由于磁饱和的影响而不是直线,倾斜度根据q轴电流iq而变化。尤其是,在q轴电流iq较大的区域中,倾斜度减小,q轴电感lq减小。因此,即使在电感根据绕组电流因磁饱和而变动的交流旋转电机的情况下,也可以提高电感的设定精度。
[0067]
《q轴振动电压指令值的振幅的计算》振动电压指令值计算部37基于流过绕组的电流信息,计算用于抵消转矩纹波分量的q轴电流的振幅iqrp0。本实施方式中,振动电压指令值计算部37参照预先设定了d轴电流id和q轴电流iq与q轴电流的振幅iqrp0之间的关系的电流振幅设定数据,计算与当前的d轴电流指令值ido和q轴电流指令值iqo相对应的q轴电流的振幅iqrp0。可以使用d轴电流检测值idr和q轴电流检测值iqr来代替d轴电流指令值ido和q轴电流指令值iqo。
[0068]
电流振幅设定数据是映射数据或近似函数等。如上所述,通过电磁场分析或实际测量获取d轴电流id和q轴电流iq的各动作点的转矩纹波分量δt的波形,将获取到的转矩纹波分量δt的振幅trp0除以极对数pm和交链磁通ψ,计算q轴电流的振幅iqrp0,并且使用计算出的q轴电流的振幅iqrp0预先设定电流振幅设定数据。
[0069]
振动电压指令值计算部37使用与式(8)的第二式的理论振幅增益βr的计算式相同的下式,基于转矩纹波分量的频率相对于磁极位置的旋转频率的阶数n、磁极位置的电角度下的旋转角速度ω、交流旋转电机的电感l和绕组的电阻值r来计算振幅增益β。接着,振动电压指令值计算部37如式(9)所示,将q轴电流的振幅iqrp0和振幅增益β的乘法值(β
·
iqrp0)设定为q轴振动电压指令值δvqoc的振幅。[数学式11]
[0070]
在本实施方式中,对于阶数n、电感l和电阻值r的值,使用与上述式(10)的校正相位α的情况相同的值,对于电感l,使用q轴电感lq。
[0071]
或者,振动电压指令值计算部37可以参照预先设定了旋转角速度ω和电感l(在本
例中为q轴电感lq)与振幅增益β之间的关系的振幅增益设定数据,计算与当前的旋转角速度ω和当前的电感l相对应的振幅增益β。或者,可以不考虑电感l的变化,振动电压指令值计算部37参照预先设定了旋转角速度ω与振幅增益β之间的关系的振幅增益设定数据,计算与当前的旋转角速度ω相对应的振幅增益β。振幅增益设定数据是基于式(11)或实验数据而预先设定的。校正相位设定数据是映射数据或近似函数等。
[0072]
在任一情况下,振动电压指令值计算部37随着磁极位置的旋转角速度ω增加而使q轴振动电压指令值δvqoc的振幅增加。并且,振动电压指令值计算部37随着电感l增加而使q轴振动电压指令值的振幅增加。
[0073]
1-3-9.电流指令校正值计算部如上所述,在本实施方式中,假设转矩纹波分量因转矩常数的变动而产生的情况,转矩纹波分量不出现在电流检测值中。因此,若用于抵消转矩纹波分量的电压振动分量叠加在绕组电压上,则绕组电流检测值振动。于是,在转矩纹波分量的频率低于电流反馈控制的截止频率的低旋转区域中,通过电流反馈控制抑制绕组电流的振动,并且转矩纹波分量的抵消效果降低。因此,在低旋转区域,需要在电流指令值上叠加用于抵消转矩纹波分量的电流振动分量,以使得绕组电流的振动不被抑制。
[0074]
因此,电流指令校正值计算部39计算q轴振动电流指令值δiqoc,该q轴振动电流指令值δiqoc具有与转矩纹波分量δt相同的频率,且成为转矩纹波分量的相反相位,并用于抵消转矩纹波分量。于是,如上所述,q轴振动电流指令值δiqoc叠加在q轴电流指令值iqo上。
[0075]
在本实施方式中,电流指令校正值计算部39使用下式计算q轴振动电流指令值δiqoc。[数学式12]δiqoc=iqrp0
·
cos(n
·
θ-θrp0-π)
···
(12)在式(12)中,(n
·
θ-θrp0-π)成为转矩纹波分量的相反相位,iqrp0成为振幅。
[0076]
转矩纹波分量的相位θrp0和q轴电流的振幅iqrp0通过与振动电压指令值计算部37相同的方法计算,在本实施方式中,使用由振动电压指令值计算部37计算得到的值。
[0077]
电流指令校正值计算部39可以构成为在磁极位置的旋转角速度ω低于与电流反馈控制的截止频率相对应地设定的速度阈值时,如上所述计算q轴振动电流指令值δiqoc并将其叠加在q轴电流指令值iqo上,在旋转角速度ω高于速度阈值时,不计算q轴振动电流指令值δiqoc且不使其叠加在q轴电流指令值iqo上。
[0078]
相反,振动电压指令值计算部37在磁极位置的旋转角速度ω高于与电流反馈控制的截止频率相对应地设定的速度阈值时,计算q轴振动电压指令值δvqoc并将其叠加在q轴电压指令值vqo上,在旋转角速度ω低于速度阈值时,不计算q轴振动电压指令值δvqoc且不使其叠加在q轴电压指令值vqo上。
[0079]
另外,在电流反馈控制的截止频率附近,可以执行q轴电流指令值iqo的叠加和q轴电压指令值vqo的叠加这两者。
[0080]
2.实施方式2接着,对实施方式2所涉及的控制装置30进行说明。对与上述实施方式1相同的结构部分省略说明。本实施方式所涉及的交流旋转电机1以及控制装置30的基本结构及处理
与实施方式1相同,但振动电压指令值计算部37中的校正相位α和振幅增益β的设定方法与实施方式1不同。图8是本实施方式所涉及的振动电压指令值计算部的框图。
[0081]
《校正相位α的设定》如图4所示,随着旋转角速度ω增加,理论提前相位αr接近π/2(90度)。此外,在转矩纹波分量的频率高于电流反馈控制的截止频率的高旋转区域中,即使将抵消电流振动分量叠加在电流指令值上,也无法将抵消电流振动分量叠加在绕组电流上,需要将抵消电压振动分量叠加在电压指令值上。因此,在本实施方式中,着重于旋转角速度ω高的情况而构成。
[0082]
因此,在本实施方式中,振动电压指令值计算部37将q轴振动电压指令值δvqoc的周期中的校正相位α设定为π/2(90度)(α=π/2)。
[0083]
根据该结构,在需要将抵消电压振动分量叠加在电压指令值上的高旋转区域中,利用理论提前相位αr接近90
°
的事实,可以简化控制系统。此外,如图4所示,若旋转角速度ω从0增加,则理论提前相位αr迅速接近90度。因此,若旋转角速度ω增加某一程度,则即使将校正相位a设定为π/2(90度),也可以降低校正误差。
[0084]
另外,振动电压指令值计算部37在磁极位置的旋转角速度ω高于开始阈值时,如上述那样计算q轴振动电压指令值δvqoc并将其叠加在q轴电压指令值vqo上,在旋转角速度ω低于开始阈值时,不计算q轴振动电压指令值δvqoc且不使其叠加在q轴电压指令值vqo上。开始阈值被设定为理论提前相位αr与π/2(90度)之差成为允许差(例如10度)的旋转角速度ω。
[0085]
《q轴振动电压指令值的振幅的计算》此外,如式(8)的第二式所示,随着旋转角速度ω增加,(n
·
ω
·
l)2相对于r2变大,理论振幅增益βr接近n
·
ω
·
l。
[0086]
因此,在本实施方式中,振动电压指令值计算部37如下式所示,计算转矩纹波分量的频率相对于磁极位置的旋转频率的阶数n、磁极位置的电角度下的旋转角速度ω和交流旋转电机的电感l的乘法值作为振幅增益β。电感l可以设为q轴电感lq,也可以与实施方式1同样地根据电流信息等改变。[数学式13]β=n
·
ω
·
l
···
(13)
[0087]
另外,振动电压指令值计算部37与实施方式1同样地,基于流过绕组的电流信息,计算用于抵消转矩纹波分量的q轴电流的振幅iqrp0。接着,振动电压指令值计算部37如式(9)所示,将q轴电流的振幅iqrp0和振幅增益β的乘法值设定为q轴振动电压指令值δvqoc的振幅。
[0088]
根据该结构,在需要将抵消电压振动分量叠加在电压指令值上的高旋转区域中,利用振幅增益β接近n
·
ω
·
l的事实,可以简化控制系统。
[0089]
因此,振动电压指令值计算部37使q轴振动电压指令值δvqoc的振幅与磁极位置的旋转角速度ω成比例地增加。并且,振动电压指令值计算部37使q轴振动电压指令值的振幅与电感l成比例地增加。
[0090]
与实施方式1同样地,振动电压指令值计算部37也可以参照振幅增益设定数据,计算振幅增益β。
[0091]
或者,振动电压指令值计算部37也可以构成为在磁极位置的旋转角速度ω高于与电流反馈控制的截止频率相对应地设定的速度阈值时,如上述那样计算q轴振动电压指令值δvqoc并将其叠加在q轴电压指令值vqo上,在旋转角速度ω低于速度阈值时,不计算q轴振动电压指令值δvqoc且不使其叠加在q轴电压指令值vqo上。
[0092]
若按上述构成,则由于在理论提前相位αr接近90
°
且理论振幅增益βr接近n
·
ω
·
l的高旋转区域中,进行q轴振动电压指令值δvqoc的叠加,因此即使将校正相位α简单地设定为π/2(90度)且将振幅增益β简单地设定为n
·
ω
·
l,也能够抑制校正误差的发生,且抵消转矩纹波分量。
[0093]
3.实施方式3接着,对实施方式3所涉及的控制装置30进行说明。对与上述实施方式1相同的结构部分省略说明。本实施方式所涉及的交流旋转电机1以及控制装置30的基本结构及处理与实施方式1或2相同,但振动电压指令值计算部37中的q轴振动电压指令值δvqoc的振动范围与实施方式1或2不同。
[0094]
根据电源电压vdc,施加到绕组的施加电压的上限限制值被决定,并且d轴电压指令值和q轴电压指令值的上限限制值也被决定。因此,如图9的比较例的时序图所示,q轴振动电压指令值δvqoc的峰部被切断,以使得叠加q轴振动电压指令值δvqoc后的q轴电压指令值vqo不超过上限限制值vlmt。在被切断的峰部转矩纹波分量不能被抵消,抵消不充分。
[0095]
因此,在本实施方式中,振动电压指令值计算部37通过q轴振动电压指令值δvqoc的叠加,以偏移方式减小q轴振动电压指令值δvqoc,使得叠加后的q轴电压指令值vqo不超过上限限制值vlmt。
[0096]
根据该结构,能够使得q轴振动电压指令值δvqoc的峰部不会被上限限制值vlmt切断,并且能够使得转矩纹波分量的抵消效果不会因q轴电压指令值的上限限制而受损。
[0097]
本实施方式中,振动电压指令值计算部37如下式所示,在将q轴振动电压指令值的振幅(β
·
iqrp0)与q轴基本电压指令值vqob相加而获得的校正前最大值vqmax超过上限限制值vlmt时,使q轴振动电压指令值δvqoc减小通过从校正前最大值vqmax减去上限限制值vlmt而获得的偏移值δvoff,计算偏移后的q轴振动电压指令值δvqoc_off,然后将偏移后的q轴振动电压指令值δvqoc_off叠加在q轴基本电压指令值vqob上来计算q轴电压指令值vqo。另一方面,振动电压指令值计算部37在校正前最大值vqmax不超过上限限制值vlmt时,不进行偏移校正,将q轴振动电压指令值δvqoc原样叠加在q轴基本电压指令值vqob上来计算q轴电压指令值vqo。[数学式14]
[0098]
根据该结构,如图10的时序图所示,可以设定q轴振动电压指令值δvqoc的峰部不被上限限制值vlmt切断的最小偏移值δvoff,从而可以将q轴电压指令值vqo的平均值从q轴基本电压指令值vqob的变动抑制到最小。因此,为了抵消转矩纹波分量,输出转矩的平均值的变动能被抑制到最小。
[0099]
或者,振动电压指令值计算部37可以构成为计算q轴振动电压指令值δvqoc,该q轴振动电压指令值δvqoc在q轴振动电压指令值的振幅(β
·
iqrp0)乘以-2得到的值到0之间振动。
[0100]
在这种情况下,振动电压指令值计算部37如下式那样,从q轴振动电压指令值δvqoc中减去q轴振动电压指令值的振幅(β
·
iqrp0)来计算偏移后的q轴振动电压指令值δvqoc_off,将偏移后的q轴振动电压指令值δvqoc_off叠加在q轴基本电压指令值vqob上来计算q轴电压指令值vqo。[数学式15]δvqoc_off=δvqoc-β
·
iqrp0=β
·
iqrp0
·
{cos(n
·
θ-θrp0-π α)-1}vqo=vqob δvqoc_off
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
···
(15)
[0101]
在这种情况下,如图11的时序图所示,通过使得始终均匀偏移,可以在减少运算负荷的同时,在能够避免q轴振动电压指令值δvqoc的峰部被上限限制值vlmt切断的情况下抵消转矩纹波分量。
[0102]
4.实施方式4接着,对实施方式4所涉及的控制装置30进行说明。对与上述实施方式1相同的结构部分省略说明。本实施方式的交流旋转电机1和控制装置30的基本结构和处理与实施方式1、2或3相同,但是与实施方式1、2或3不同的是,交流旋转电机1和控制装置30组装到电动助力转向装置60中。
[0103]
在本实施方式中,如图12所示,交流旋转电机1是车轮62的转向装置63的驱动力源。交流旋转电机1和控制装置30构成电动助力转向装置60。交流旋转电机1的转子的旋转轴通过驱动力传递机构61与车轮62的转向装置63连接。例如,电动助力转向装置60包括驾驶员左右旋转的方向盘64、与方向盘64连接并将方向盘64的转向转矩传递到车轮62的转向装置63的轴65、安装在轴65上并检测方向盘64的转向转矩ts的转矩传感器66、以及将交流旋转电机1的旋转轴与轴65连接的蜗轮机构等驱动力传递机构61。
[0104]
转矩传感器66的输出信号被输入到控制装置30(输入电路92),并且控制装置30基
于转矩传感器66的输出信号检测驾驶员的转向转矩ts。电流指令值计算部35基于转向转矩ts计算用于辅助转向转矩ts的电流指令值。例如,电流指令值计算部35如下式所示,将转向转矩ts乘以辅助增益ka来计算q轴电流指令值iqo。另外,d轴电流指令值ido被设定为0。辅助增益ka可以根据本车辆的行驶速度等而改变。[数学式16]
[0105]
另外,电流指令值计算部35可以基于根据转向转矩ts计算出的目标转矩等,使用最大转矩电流控制、弱磁通控制等来计算d轴和q轴电流指令值ido、iqo。
[0106]
在用于电动助力转向装置60的交流旋转电机1中,阶数n(例如,6阶)转矩纹波分量叠加。由于转矩纹波分量,(1)方向盘的转向感变差,(2)在转矩纹波分量的频率与机械谐振频率一致时,噪声增加。为了抑制这些(1)和(2),如实施方式1至3所示,需要在绕组电流上叠加抵消电流振动分量。
[0107]
关于(1),由于传递到方向盘的转矩纹波分量的频带是200hz左右以下的低频带,因此通过将q轴振动电流指令值δiqoc叠加在q轴电流指令值iqo上,可以通过电流反馈控制将抵消电流振动分量叠加在绕组电流上,从而改善方向盘的转向感。
[0108]
关于(2),由于机械谐振频率处于高频带(例如,300hz至4000hz左右),所以抵消电流振动分量的频率成为300hz至4000hz的高频。因此,由于还包含比电流反馈控制的截止频率要高的频率,因此仅将q轴振动电流指令值δiqoc叠加在q轴电流指令值iqo上是不够的,通过将q轴振动电压指令值δvqoc叠加在q轴电压指令值vqo上,可以将抵消电流振动分量叠加在绕组电流上,从而可以抑制由谐振引起的噪声的增加。因此,对于电动助力转向装置60,可以使用转矩常数变动的廉价交流旋转电机。
[0109]
[其它实施方式]最后,对本技术的其他的实施方式进行说明。另外,下面说明的各实施方式的结构并不限于分别单独地进行应用,只要不产生矛盾,也能与其它实施方式的结构相组合来进行应用。
[0110]
(1)在上述各实施方式中,以在定子中设定三相绕组的情况为例进行了说明。然而,绕组的相数可以是任意的相数,可以设置多组绕组,对于各组绕组可以进行各实施方式那样的电动机控制。
[0111]
(2)在上述的各实施方式中,以交流旋转电机1设为永磁体型同步交流旋转电机的情况为例进行了说明。但是,本技术的实施方式并不限于此。即,交流旋转电机1可以是电磁铁型同步交流旋转电机、感应旋转电机等各种旋转电机。
[0112]
(3)在上述各实施方式中,以在电流检测值中没有出现转矩纹波分量的情况下,使q轴振动电压指令值δvqoc叠加到q轴电压指令值vqo,使q轴振动电流指令值δiqoc叠加到q轴电流指令值iqo的情况为例进行了说明。但是,本技术的实施方式并不限于此。即,当转矩纹波分量出现在电流检测值中时,可以使q轴振动电压指令值δvqoc叠加在q轴电压指令值vqo上。在这种情况下,由于抵消电流振动分量不会因电流反馈控制而抵消,所以可以不使q轴振动电流指令值δiqoc叠加在q轴电流指令值iqo上。
[0113]
(4)在上述各实施方式中,以无视式(6)的抵消d轴电压δvdc的项(-ω
·
lq
·
δ
iq)的情况为例进行了说明。但是,本技术的实施方式并不限于此。即,振动电压指令值计算部37可以使用下式计算d轴振动电压指令值δvdoc,并将其叠加在d轴基本电压指令值vdob上。[数学式17]δvdoc=ω
·
l
·
iqrp0
·
cos(n
·
θ-θrp0)
···
(17)在式(17)中,(n
·
θ-θrp0)成为转矩纹波分量的相位,(ω
·
l
·
iqrp0)成为振幅。对于电感l,使用q轴电感lq。相对于磁极位置θ的n倍值的转矩纹波分量的相位θrp0、q轴电流的振幅iqrp0以及q轴电感lq通过与上述各实施方式相同的方法计算。
[0114]
(5)在上述各实施方式中,以使用q轴电感lq作为电感l的情况为例进行了说明。然而,对于电感l,也可以使用q轴电感lq和d轴电感ld的合计值。
[0115]
(6)在上述各实施方式中,以阶数n为6的情况为例进行了说明。然而,阶数n可以是6以外的任意自然数。此外,在叠加多个阶数的转矩纹波分量时,计算针对各阶数的转矩纹波分量的q轴振动电压指令值δvqoc和q轴振动电流指令值δiqoc,将多个阶数的q轴振动电压指令值δvqoc和q轴振动电流指令值δiqoc的合计值叠加在q轴电压指令值vqo和q轴电流指令值iqo上。
[0116]
(7)在上述各实施方式中,以使用了余弦函数(cos)、反正切函数(arctan)等的式的情况为例进行了说明。但是,也可以使用三角函数的公式,从而使用转换成任意等价公式而得到的公式。
[0117]
(8)在上述实施方式4中,以交流旋转电机1成为车轮62的转向装置63的驱动力源、交流旋转电机1和控制装置30组装到电动助力转向装置60的情况为例进行了说明。但是,本技术的实施方式并不限于此。交流旋转电机1可以设为转向装置63以外的装置(例如车轮)的驱动力源,并且交流旋转电机1和控制装置30可以组装到电动助力转向装置60以外的装置(例如车辆的动力装置)中。
[0118]
虽然本技术记载了各种示例性实施方式和实施例,但是在一个或多个实施方式中记载的各种特征、方式和功能不限于特定实施方式的应用,可以单独地或以各种组合来应用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。标号说明
[0119]
1交流旋转电机,20逆变器,31磁极位置检测部,32电流检测部,33dq轴电流转换部,34电源电压检测部,35电流指令值计算部,36基本电压指令值计算部,37振动电压指令值计算部,38开关控制部,60电动助力转向装置,ido d轴电流指令值,idr d轴电流检测值,iqo q轴电流指令值,iqr q轴电流检测值,iqrp0 q轴电流的振幅,δiqoc q轴振动电流指令值,vdob d轴基本电压指令值,vqob q轴基本电压指令值,vqo q轴电压指令值,δvqoc q轴振动电压指令值,vlmt上限限制值,δt转矩纹波分量,α校正相位,β振幅增益,θ磁极位置,θrp0转矩纹波分量的相位,ω旋转角速度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
