1.本发明涉及测量技术领域,尤其涉及一种倾斜检测装置、方法和机械臂系统。
背景技术:
2.目前半导体工艺需要传递晶圆,利用各种装置(例如,机械臂、对准、前开式晶圆传送盒foup(front opening unified pod)和中心查找)移动到工艺室内,但因中间过程中倾斜造成晶圆损坏以及工艺不良,特别是移动晶圆的机械臂承载结构倾斜。
3.目前实施机械臂查找以及机械臂校准,无感应半导体机械臂的承载结构是否倾斜的功能,倾斜造成晶圆刮伤以及损坏后才会掌握问题点,目前机械臂主要功能为移动晶圆、晶圆扫描和晶圆定位。
4.由于机械臂模块目前没有可以感应左右倾斜的功能,所以晶圆持续性的移动时,发现承载结构问题的时通常都是在晶圆损坏以及刮伤或工艺不良(边缘低良率)发生后。
技术实现要素:
5.鉴于上述的分析,本发明实施例旨在提供一种倾斜检测装置、方法和机械臂系统,用以解决现有机械臂模块没有感应左右倾斜的功能而导致的晶圆持续性的移动时,发现承载结构问题的时机点通常都是在晶圆损坏以及刮伤或工艺不良(边缘低良率)发生后的问题。
6.一方面,本发明实施例提供了一种倾斜检测装置,包括:待测对象,放置在机械臂承载结构上;激光光纤传感器,包括第一激光光纤传感器和第二激光光纤传感器,以中心对称的方式分别设置在所述机械臂承载结构和机械臂臂部之间的阻挡件的两端处,其中,用于在所述待测对象移动过程中,以平行方式朝向所述待测对象分别发射激光束并相应地接收从所述待测对象反射的反射光,以根据所述反射光判断所述待测对象是否倾斜。
7.上述技术方案的有益效果如下:通过第一激光光纤传感器和第二激光光纤传感器能够朝向待测对象分别发射激光束并相应地接收从待测对象反射的反射光,然后根据反射光预先感应待测对象是否倾斜。通过预先感应到机械臂承载结构细微倾斜,能够避免晶圆刮伤以及损坏。
8.基于上述装置的进一步改进,所述阻挡件为圆柱体,其中,所述激光光纤传感器的激光发射点在圆柱体两端位于圆心处并且反射点位于所述待测对象的与所述阻挡件相对的侧壁上。
9.基于上述装置的进一步改进,根据所述反射光判断所述待测对象是否倾斜包括:根据所述反射光确定所述激光发射点与所述待测对象的反射点之间的距离,其中,所述距离包括所述阻挡件的边缘至所述待测对象上的反射点之间的间距与所述阻挡件的半径之和;根据所述距离判断所述待测对象相对于所述机械臂承载结构是否倾斜,其中,当所述距离在10至30mm之间时,所述激光光纤传感器的读数为1,所述待测对象在倾斜误差允许的范围内;以及当所述距离在0至10mm之间或者在30mm至无穷大之间时,所述激光光纤传感器的
读数为0,所述待测对象相对于所述机械臂承载结构存在倾斜。
10.基于上述装置的进一步改进,所述激光束包括第一激光束和第二激光束;所述反射光包括第一反射光和第二反射光;所述距离包括所述第一激光光纤传感器的第一激光发射点与第一反射点之间的第一距离和所述第二激光光纤传感器的第二激光发射点与第二反射点之间的第二距离,其中,当所述第一激光光纤传感器和所述第二激光光纤传感器的读数均为1时,所述待测对象相对于所述机械臂承载结构不倾斜;当所述第一激光光纤传感器和所述第二激光光纤传感器的两个读数中的任一个为0时,所述待测对象相对于所述机械臂承载结构轻微倾斜,触发机械臂校准装置;以及当所述第一激光光纤传感器和所述第二激光光纤传感器的两个读数均为0时,所述待测对象相对于所述机械臂承载结构严重倾斜,触发所述倾斜检测装置与机械臂连动的互锁装置。
11.基于上述装置的进一步改进,倾斜检测装置还包括水平传感器,所述水平传感器包括第一水平传感器和第二水平传感器,分别安装在所述第一激光光纤传感器和第二激光光纤传感器上,用于感应机械臂的所述机械臂承载结构的自体倾斜。
12.基于上述装置的进一步改进,所述待测对象为晶圆。
13.另一方面,本发明实施例提供了一种机械臂系统,包括以上所述倾斜检测装置。
14.又一方面,本发明实施例提供了一种倾斜检测方法,包括:将待测对象放置在机械臂承载结构上;在所述待测对象移动过程中,通过激光光纤传感器以平行方式按照预定时间同时发射两道激光束,并相应地接收从所述待测对象反射的反射光,其中,所述激光光纤传感器包括第一激光光纤传感器和第二激光光纤传感器,以中心对称的方式分别设置在所述机械臂承载结构和机械臂臂部的阻挡件的两端处;以及根据所述反射光判断所述待测对象是否倾斜。
15.基于上述方法的进一步改进,将所述阻挡件设置为圆柱体,其中,所述激光光纤传感器的激光发射点在圆柱体两端位于圆心处并且反射点位于所述待测对象的与所述阻挡件相对的侧壁上。
16.基于上述方法的进一步改进,根据所述反射光判断所述待测对象是否倾斜包括:根据所述反射光确定所述激光发射点与所述待测对象的反射点之间的距离,其中,所述距离包括所述阻挡件的边缘至所述待测对象上的反射点之间的间距与所述阻挡件的半径之和;根据所述距离判断所述待测对象相对于所述机械臂承载结构是否倾斜,其中,当所述距离在10至30mm之间时,所述激光光纤传感器的距离读数为1,所述待测对象在倾斜误差允许的范围内;以及当所述距离在0至10mm之间或者在30mm至无穷大之间时,所述激光光纤传感器的距离读数为0,所述待测对象相对于所述机械臂承载结构存在倾斜。
17.基于上述方法的进一步改进,所述激光束包括第一激光束和第二激光束;所述反射光包括第一反射光和第二反射光;所述距离包括所述第一激光光纤传感器的第一激光发射点与第一反射点之间的第一距离和所述第二激光光纤传感器的第二激光发射点与第二反射点之间的第二距离,其中,当所述第一激光光纤传感器和所述第二激光光纤传感器的读数均为1时,所述待测对象相对于所述机械臂承载结构不倾斜;当所述第一激光光纤传感器和所述第二激光光纤传感器的两个读数中的任一个为0时,所述待测对象相对于所述机械臂承载结构轻微倾斜,给出提醒指示以进行机械臂校准;以及当所述第一激光光纤传感器和所述第二激光光纤传感器的两个读数均为0时,所述待测对象相对于所述机械臂承载
结构严重倾斜,给出停止机械臂和报警指示以使所述倾斜检测装置与机械臂连动互锁。
18.基于上述方法的进一步改进,倾斜检测方法还包括:通过水平传感器感应机械臂的所述机械臂承载结构的自体倾斜,其中,所述水平传感器包括第一水平传感器和第二水平传感器,分别安装在所述第一激光光纤传感器和所述第二激光光纤传感器上。
19.与现有技术相比,本发明至少可实现如下有益效果之一:
20.1、通过第一激光光纤传感器和第二激光光纤传感器能够朝向待测对象分别发射激光束并相应地接收从待测对象反射的反射光,然后根据反射光预先感应待测对象是否倾斜。因此,通过预先感应到机械臂承载结构细微倾斜,根据提醒指示以进行机械臂校准,进而避免晶圆刮伤以及损坏。
21.2、通过预先感应到机械臂承载结构的严重倾斜,根据停止机械臂和报警指示使所述倾斜检测装置与机械臂连动互锁,进而避免晶圆刮伤以及损坏。
22.3、通过水平传感器感应机械臂承载结构的自体倾斜,进而感应机械臂的整体倾斜。
23.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
24.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
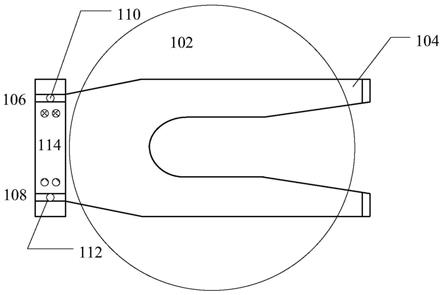
25.图1为根据本发明实施例的倾斜检测装置的示意图。
26.图2为根据本发明实施例的倾斜检测装置在测量倾斜过程中的激光束的示意图。
27.图3为根据本发明实施例的倾斜检测方法的流程图。
28.附图标记:
29.102-待测对象;104-机械臂承载结构;106-第一激光光纤传感器;108-第二激光光纤传感器;110-第一水平传感器;112-第二水平传感器;114-阻挡件;116-第一线段;118-第二线段;120-第三线段;122-第四线段
具体实施方式
30.以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。
31.在附图中示出了根据本公开实施例的各种结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状以及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
32.在本公开的上下文中,当将一层/元件称作位于另一层/元件“上”时,该层/元件可
以直接位于该另一层/元件上,或者它们之间可以存在居中层/元件。另外,如果在一种朝向中一层/元件位于另一层/元件“上”,那么当调转朝向时,该层/元件可以位于该另一层/元件“下”。
33.本发明的一个具体实施例,参考图1,公开了一种倾斜检测装置,用于对放置在机械臂承载结构104上的待测对象102是否倾斜进行检测。在一个实施例中,待测对象102可以为晶圆,例如,晶圆的厚度为0.775mm。通过机械臂承载结构可以将待测对象移动到空间的期望位置,例如,工艺室的晶圆台、前开式晶圆传送盒、和下一工艺室的晶圆台等。该倾斜检测装置可应用于将待测对象移动到期望位置的机械臂的控制装置中。
34.继续参见图1,倾斜检测装置包括激光光纤传感器,激光光纤传感器包括第一激光光纤传感器106和第二激光光纤传感器108,以中心对称的方式分别设置在机械臂承载结构104和机械臂臂部之间的阻挡件(block)114的两端处。在待测对象104移动过程中,第一激光光纤传感器106和第二激光光纤传感器108以平行方式朝向待测对象104分别发射激光束并相应地接收从待测对象104反射的反射光,以根据反射光判断待测对象是否倾斜。阻挡件114可以为圆柱体,其中,两个激光光纤传感器的激光发射点在圆柱体两端位于圆心处并且相应的两个反射点位于待测对象104的与阻挡件114相对的侧壁上。第一激光光纤传感器发射的激光束为第一激光束,第二激光光纤传感器发射的激光束为第二激光束。在本实施例中,每道激光束无法透过该晶圆而是在到达晶圆的边缘时反射该激光束。因此,激光光纤传感器可用于检测距离,即,测量距离的一半为激光光纤传感器和晶圆边缘之间的距离。通过第一激光光纤传感器106和第二激光光纤传感器108而发射的第一激光束和第二激光束可以用于检测两个激光光纤传感器与两个反射点之间的距离。
35.相应地,反射光也包括第一反射光和第二反射光。根据第一反射光和第二反射光确定两个激光发射点与待测对象104的两个反射点之间的距离,此处的距离包括阻挡件114的边缘至待测对象104上的反射点之间的间距与阻挡件114的半径之和,其中,阻挡件114的半径是固定常数。在可选实施例中,当阻挡件114的半径足够小时,可以忽略该半径。第一激光光纤传感器106的第一激光发射点与第一反射点之间的距离称为第一距离,第二激光光纤传感器108的第一激光发射点与第二反射点之间的距离称为第二距离。
36.在一种可能的实施方式中,根据第一距离和第二距离中的任一个距离判断待测对象相对于机械臂承载结构是否倾斜。具体地,参考图2,当距离在10至30mm之间时,激光光纤传感器的读数为1,待测对象在倾斜误差允许的范围内。例如,带箭头的第一线段116和第二线段118所指示的距离为正常距离。当距离在0至10mm之间或者在30mm至无穷大(例如,200mm)之间时,激光光纤传感器的读数为0,待测对象相对于机械臂承载结构存在倾斜。例如,带箭头的第三线段120和第四线段122所指示的距离为异常距离。
37.在一种可能的实施方式中,根据第一距离和第二距离判断待测对象相对于机械臂承载结构是否倾斜。待测对象相对于机械臂承载结构之间位置关系存在以下三种情况:当第一激光光纤传感器和第二激光光纤传感器的读数均为1时,即,第一距离和第二距离均在10至30mm之间时,判断待测对象相对于机械臂承载结构在倾斜误差允许的范围内,优选地,第一距离和第二距离均为20mm时,判断待测对象相对于机械臂承载结构恰好对准或者没有倾斜。当第一激光光纤传感器和第二激光光纤传感器的两个读数中的其中一个为0,而另一个读数为1时,即,晶圆的尺寸为200mm,当第一距离和第二距离中的任一个在0至10mm之间
或者在30mm至无穷大之间时,待测对象相对于机械臂承载结构存在轻微倾斜,即,倾斜尺寸与晶圆尺寸的比率小于10%,触发机械臂校准装置。当第一激光光纤传感器和第二激光光纤传感器的两个读数均为0时,即,当第一距离和第二距离均在0至10mm之间或者在30mm至无穷大之间时,待测对象相对于机械臂承载结构严重倾斜,即,倾斜尺寸与晶圆尺寸的比率大于10%,触发倾斜检测装置与机械臂连动的互锁装置。
38.倾斜检测装置还可以包括分别安装在第一激光光纤传感器106和第二激光光纤传感器108上的第一水平传感器110和第二水平传感器112,用于感应机械臂的机械臂承载结构104的自体倾斜。排除由于自体倾斜而对待测对象(例如晶圆)倾斜检测结果造成的影响。
39.本发明的另一个具体实施例,公开了一种机械臂系统。机械臂系统是用于移动待测对象的机械臂。机械臂系统包括以上所述的倾斜检测装置。
40.本发明的又一个具体实施例,公开了一种倾斜检测方法。下文中,将参考图1和图3,对倾斜检测方法进行详细描述。
41.参考图1,通过水平传感器感应机械臂的机械臂承载结构的自体倾斜,以能够感应机械臂的整体倾斜。水平传感器包括第一水平传感器和第二水平传感器。第一水平传感器和第二水平传感器分别安装在第一激光光纤传感器和第二激光光纤传感器上。其中,第一激光光纤传感器和第二激光光纤传感器,以中心对称的方式分别设置在机械臂承载结构和机械臂臂部的阻挡件的两端处。将阻挡件设置为圆柱体,该阻挡件用于防止晶圆滑片,其中,激光光纤传感器的激光发射点在圆柱体两端位于圆心处。当机械臂承载结构存在自体倾斜时,调整机械臂承载结构,使得机械臂承载结构保持水平。
42.当机械臂承载结构保持水平后,将待测对象放置在机械臂承载结构上,参考图3中的步骤s302。在一个实施例中,待测对象102为晶圆,例如,晶圆的厚度为0.775mm。
43.放置好待测对象后,通过机械臂承载结构移动待测对象,在待测对象移动过程中,通过第一、第二激光光纤传感器以平行方式按照预定时间同时发射两道激光束(第一激光束和第二激光束),并相应地接收从待测对象反射的反射光(第一反射光和第二反射光),参考图3中的步骤s304。反射点位于待测对象的与阻挡件相对的侧壁上。
44.接收到第一反射光和第二反射光后,参考图3中的步骤s306,首先,根据第一反射光和第二反射光中的每道反射光确定激光发射点与待测对象的反射点之间的第一距离和第二距离。其中,第一距离为第一激光光纤传感器的第一激光发射点与第一反射点之间的距离,第二距离为第二激光光纤传感器的第二激光发射点与第二反射点之间的距离。第一距离和第二距离中的任一个距离均包括阻挡件的边缘至待测对象上的反射点之间的间距与阻挡件的半径之和。其次,根据得到的距离判断待测对象相对于机械臂承载结构是否倾斜,其中,当距离在10至30mm之间时,激光光纤传感器的距离读数为1,待测对象正常。当距离在0至10mm之间或者在30mm至无穷大之间时,激光光纤传感器的距离读数为0,待测对象相对于机械臂承载结构存在倾斜。
45.具体地,当第一激光光纤传感器和第二激光光纤传感器的读数均为1时,即,当第一距离和第二距离均在10至30mm之间时,待测对象相对于机械臂承载结构不倾斜。当第一激光光纤传感器和第二激光光纤传感器的两个读数中的任一个为0时,即,当第一距离和第二距离中的任一个在0至10mm之间或者在30mm至无穷大之间时,待测对象相对于机械臂承载结构轻微倾斜,给出提醒指示以进行机械臂校准。当第一激光光纤传感器和第二激光光
纤传感器的两个读数均为0时,即,当第一距离和第二距离均在0至10mm之间或者在30mm至无穷大之间时,待测对象相对于机械臂承载结构严重倾斜,给出停止机械臂和报警指示以使倾斜检测装置与机械臂连动互锁。
46.与现有技术相比,本发明至少可实现如下有益效果之一:
47.1、通过第一激光光纤传感器和第二激光光纤传感器能够朝向待测对象分别发射激光束并相应地接收从待测对象反射的反射光,然后根据反射光预先感应待测对象是否倾斜。因此,通过预先感应到机械臂承载结构细微倾斜,根据提醒指示以进行机械臂校准,进而避免晶圆刮伤以及损坏。
48.2、通过预先感应到机械臂承载结构的严重倾斜,根据停止机械臂和报警指示使所述倾斜检测装置与机械臂连动互锁,进而避免晶圆刮伤以及损坏。
49.3、通过水平传感器感应机械臂承载结构的自体倾斜,进而感应机械臂的整体倾斜。
50.在以上的描述中,对于各层的构图、刻蚀等技术细节并没有做出详细的说明。但是本领域技术人员应当理解,可以通过各种技术手段,来形成所需形状的层、区域等。另外,为了形成同一结构,本领域技术人员还可以设计出与以上描述的方法并不完全相同的方法。另外,尽管在以上分别描述了各实施例,但是这并不意味着各个实施例中的措施不能有利地结合使用。
51.以上对本公开的实施例进行了描述。但是,这些实施例仅仅是为了说明的目的,而并非为了限制本公开的范围。本公开的范围由所附权利要求及其等价物限定。不脱离本公开的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本公开的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。