1.本公开涉及判定装置、判定方法以及程序。
2.本技术基于2019年5月17日在日本技术的特愿2019-093674、以及2019年11月28日在日本技术的特愿2019-215658号主张优先权,并将其内容引用于此。
背景技术:
3.尝试掌握活体的排泄的状况。例如,公开了由相机对排泄物进行摄影,并分析该图像的技术(例如参考专利文献1)。
4.为了进行人的表情的分析等,一般使用机器学习。在使用机器学习的方法中,例如使用将人的表情的特征量和与该表情对应的感情相对应的学习数据来执行机器学习,从而制成学习完毕模型。通过使人的表情的特征量输入至该学习完毕模型,能够估计该表情所意味着的感情,能够进行表情的分析。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2007-252805号公报
技术实现要素:
8.发明要解决的课题
9.在使用上述专利文献1那样的技术的情况下,分析的精度不足。即,由于使用预先制成的将便的排出速度、硬度或者大小与便的分类(例如,硬便或水状便等)相对应的表格来进行分析,因此针对在表格中未设定的对象无法得到正确的分类。
10.考虑将上述的机器学习的方法应用于排泄行为的分析。例如,使用将从在排泄时得到的各种各样的图像提取的特征量与其分类或判定的结果相对应的学习数据,执行机器学习,从而制成学习完毕模型。通过使从作为分析对象的图像提取的特征量输入至该学习完毕模型,能够估计排泄行为中的期望的分析的结果。
11.在使用机器学习的方法的情况下,作为学习数据,必须从图像提取特征量,因此需要认清通过怎样的方法提取怎样的特征量为佳,开发需要时间。
12.本公开提供在使用机器学习进行的与排泄行为有关的分析中能够减少开发所需的时间的判定装置、判定方法以及程序。
13.用于解决课题的手段
14.判定装置具备:图像信息取得部,取得对排泄中的便盆的内部空间进行摄像而得到的对象图像的图像信息;估计部,使所述图像信息输入至学习完毕模型,从而针对所述对象图像进行与判定事项有关的估计,其中所述学习完毕模型是通过使用神经网络的机器学习,学习了表示排泄中的便盆的内部空间的学习用图像与所述判定事项的判定结果之间的对应关系而得到的模型,所述判定事项是与排泄有关的判定事项;以及判定部,基于所述估计部的估计结果,针对所述对象图像进行与所述判定事项有关的判定。
附图说明
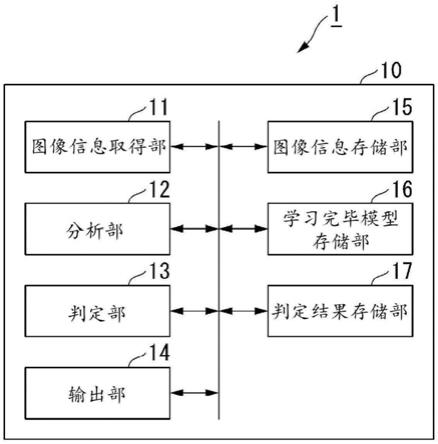
15.图1是表示第一实施方式所涉及的判定装置被应用于的判定系统的结构的框图。
16.图2是表示第一实施方式所涉及的学习完毕模型存储部的结构的框图。
17.图3是针对第一实施方式所涉及的判定装置作为判定对象的图像进行说明的图。
18.图4是表示第一实施方式所涉及的判定装置所进行的处理的整体的流程的流程图。
19.图5是表示第一实施方式所涉及的判定装置所进行的判定处理的流程的流程图。
20.图6是表示第一实施方式所涉及的判定装置所进行的清洗方法的判定处理的流程的流程图。
21.图7是说明第二实施方式所涉及的判定装置的图。
22.图8是表示第二实施方式所涉及的判定装置被应用于的判定系统的结构的框图。
23.图9是说明第二实施方式所涉及的前处理部所进行的处理的图。
24.图10是表示第二实施方式所涉及的判定装置所进行的处理的流程的流程图。
25.图11是说明第二实施方式的变形例1所涉及的前处理部所进行的处理的图。
26.图12是表示第二实施方式的变形例1所涉及的判定装置所进行的处理的流程的流程图。
27.图13是说明第二实施方式的变形例2所涉及的前处理部所进行的处理的图。
28.图14是表示第二实施方式的变形例2所涉及的判定装置所进行的处理的流程的流程图。
29.图15是表示第三实施方式所涉及的判定装置的结构的框图。
30.图16是说明第三实施方式所涉及的分析部所进行的处理的图。
31.图17是表示第三实施方式所涉及的判定装置所进行的处理的流程的流程图。
32.图18是表示第四实施方式所涉及的学习完毕模型存储部的结构的框图。
33.图19是表示第四实施方式所涉及的判定装置所进行的判定处理的流程的流程图。
具体实施方式
34.(第一实施方式)
35.如图1所示,判定系统1例如具备判定装置10。
36.判定装置10基于作为判定对象的对象图像(以下也简称为图像),进行与排泄有关的判定。对象图像是与排泄有关的图像,例如是对排泄后的便盆32(参考图3)的内部空间34(参考图3)进行摄像而得到的图像。排泄后,是在使用者进行了排泄之后直到便器被清洗之前的任意的时刻,例如是就座于便器30(参考图3)的使用者已离座时。与排泄有关的判定,是与排泄行为和状况、以及排泄物的清洗有关的判定事项,例如是基于排泄的有无、尿的有无、便的有无、便的性状、纸(例如,卫生纸)有无使用、纸的使用量等信息的排泄后的便器30清洗方法或排泄的状况等。便的性状既可以是表示便的形状的“硬便”“普通便”“软便”“泥状便”“水状便”等表示便的状态的信息,也可以是“硬”“软”等表示性状或状态的信息。便的形状根据向便盆飞散、便在积水部中的溶出方式、浑浊方式、在积水内部(即水中)或水面以上(即空气中)的特征等观点,进行附加标签等评估。便的性状也可以是表示便的量的信息,便的量既可以是表示多或少的两个区分、或者多或普通或少的三个等区分的信息,也可以
是以数值表示便的量的信息。便的性状也可以是表示便的颜色的信息。便的颜色例如既可以是以土黄色~茶色的情况作为通常的便的颜色而表示是否为通常的便的颜色的信息,也可以是特别表示便的颜色是否为黑色(所谓焦油便的颜色)的信息。排泄后的便器30的清洗方法包含在清洗中使用的清洗水的水量、水压、以及清洗的次数等。
37.判定装置10例如具备图像信息取得部11、分析部12、判定部13、输出部14、图像信息存储部15、学习完毕模型存储部16和判定结果存储部17。分析部12是“估计部”的一例。
38.图像信息取得部11取得关于排泄而被摄像的便盆32的内部空间34的对象图像的图像信息。图像信息取得部11将取得的图像信息输出至分析部12并且使其存储至图像信息存储部15。图像信息取得部11与便器装置3以及摄像装置4(参考图3)连接。
39.分析部12进行与从图像信息取得部11得到的图像信息对应的对象图像的分析。分析部12的分析,是基于对象图像针对与排泄有关的判定的项目进行估计。
40.分析部12例如使用与判定部13的判定项目相应的学习完毕模型进行估计。学习完毕模型例如是学习完毕模型存储部16中存储的模型,是学习了对象图像和与排泄有关的评估的结果之间的对应关系而得到的模型。
41.例如,分析部12将从学习了图像与尿的有无之间的对应关系而得到的学习完毕模型得到的输出,作为估计尿的有无的估计结果。分析部12将从学习了图像与便的有无之间的对应关系而得到的学习完毕模型得到的输出,作为估计便的有无的估计结果。分析部12将从学习了图像与便的性状之间的对应关系而得到的学习完毕模型得到的输出,作为估计便的性状的估计结果。分析部12将从学习了图像与纸有无使用之间的对应关系而得到的学习完毕模型得到的输出,作为估计纸有无使用的估计结果。分析部12将从学习了图像与纸的使用量之间的对应关系而得到的学习完毕模型得到的输出,作为估计纸的使用量的估计结果。
42.分析部12也可以使用根据图像对多个项目进行估计的学习完毕模型进行估计。例如,分析部12也可以使用学习了图像与尿以及便各自的有无之间的对应关系而得到的学习完毕模型进行估计。分析部12在根据学习完毕模型估计为图像中既没有尿也没有便的情况下,估计为没有排泄。
43.判定部13使用从分析部12得到的分析结果,进行与排泄有关的判定。例如,判定部13将根据图像所估计的尿的有无,作为判定该图像中的尿的有无的判定结果。判定部13将根据图像所估计的便的有无,作为判定该图像中的便的有无的判定结果。判定部13将根据图像所估计的便的性状,作为判定该图像中的便的性状的判定结果。判定部13将根据图像所估计的纸有无使用,作为判定该图像中纸有无使用的判定结果。判定部13将根据图像所估计的纸的使用量,作为判定该图像中的纸的使用量的判定结果。
44.判定部13也可以使用多个估计结果,进行与排泄有关的判定。例如,也可以基于根据图像所估计的便的性状以及纸的使用量,判定排泄后的便器30的清洗方法。
45.输出部14输出判定部13的判定结果。输出部14例如也可以向进行了排泄行为的用户的终端发送判定结果。由此,用户能够辨识自身的排泄行为和状况的判定结果。图像信息存储部15存储由图像信息取得部11取得的图像信息。学习完毕模型存储部16存储与各个判定项目对应的学习完毕模型。判定结果存储部17存储判定部13的判定结果。
46.学习完毕模型存储部16中存储的学习完毕模型例如使用深度学习(dl)的方法而
被制成。dl是基于由多层的神经网络构成的深度神经网络(dnn)的机器学习的方法。dnn通过根据神经科学中的预测编码的原理而构想的网络来实现,通过模仿神经传递网的函数来构筑。通过使用dl的方法,能够使学习完毕模型宛如与人的思考相同地,自动地辨识图像中内在的特征量。即,不用进行提取特征量的作业,而通过使学习完毕模型学习对象图像的数据本身,就能够直接根据图像进行估计。
47.在以下,以学习完毕模型使用dl的方法而被制成的情况为例进行说明。但是,本公开不限定于此。学习完毕模型只要是至少不用根据图像数据提取其特征量,而通过学习将图像数据与便性的评估结果相对应的学习数据从而制成的模型即可。图像数据是便盆32的内部空间34的各种各样的图像。
48.如图2所示,学习完毕模型存储部16例如具备尿有无估计模型161、便有无估计模型162、便性状估计模型163、纸使用有无估计模型165和使用纸张量估计模型166。
49.尿有无估计模型161是学习了图像与尿的有无之间的对应关系而得到的学习完毕模型,通过学习将对象图像与根据该图像判断的表示尿的有无的信息相对应的学习数据而被制成。便有无估计模型162是学习了图像与便的有无之间的对应关系的学习完毕模型,通过学习将对象图像与根据该图像判断的表示便的有无的信息相对应的学习数据而被制成。
50.便性状估计模型163是学习了图像与便的性状之间的对应关系而得到的学习完毕模型,通过学习将对象图像与根据该图像判断的表示便的性状的信息相对应的学习数据而被制成。
51.纸使用有无估计模型165是学习了图像与纸有无使用之间的对应关系而得到的学习完毕模型,通过学习将对象图像与根据该图像判断的表示有无被使用的纸的信息相对应的学习数据而被制成。使用纸张量估计模型166是学习了图像与纸的使用量之间的对应关系而得到的学习完毕模型,通过学习将对象图像与根据该图像判断的表示纸的使用量的信息相对应的学习数据而被制成。纸的使用量既可以是表示多或少的两个区分、或者多或普通或少的三个等的区分的信息,也可以是以数值表示纸的量的信息。作为根据图像判断排泄的有无等的方法,例如可以考虑由制成学习数据的负责人进行判断。
52.在图3中,示意性地表示了便器装置3与摄像装置4的位置关系。
53.便器装置3例如具备具有便盆32的便器30。便器装置3构成为能够向便盆32的内部空间34中设置的开口部36供应清洗水s。便器装置3通过便器30中设置的功能部(未图示),探测便器装置3的使用者的就座或离座、局部清洗的使用开始、以及排泄后的便盆32的清洗的操作等。便器装置3将功能部的探测结果向判定装置10发送。
54.在以下的说明中,在便器装置3的使用者已就座于便器30的情况下,将使用者的前侧称为“前侧”,将后侧称为“后侧”。在便器装置3的使用者已就座于便器30的情况下,将使用者的左侧称为“左侧”,将右侧称为“右侧”。将从设置了便器装置3的地板面分离一侧称为“上侧”,将靠近地板面一侧称为“下侧”。
55.摄像装置4以能够摄像与排泄行为有关的内容的方式设置。摄像装置4在便器30的上侧、例如便盆32的后侧中的边缘的内侧等处,以镜头朝向便盆32的内部空间34的方向的方式设置。摄像装置4例如根据判定装置10的指示来进行摄像,并将摄像的图像的图像信息向判定装置10发送。在该情况下,判定装置10经由图像信息取得部11,向摄像装置4发送表示摄像的指示的控制信息。
56.针对第一实施方式所涉及的判定装置10所进行的处理,使用图4~图6进行说明。
57.使用图4,说明判定装置10所进行的处理中的整体的流程。在步骤s10中,判定装置10通过与便器装置3的通信,判定便器装置3的使用者是否已就座于便器30。判定装置10在判定为使用者已就座于便器30的情况下,在步骤s11中,取得图像信息。图像信息是对象图像的图像信息。判定装置10向摄像装置4发送指示摄像的控制信号,使摄像装置4对便盆32的内部空间34进行摄像并发送所摄像的图像的图像信息,从而取得图像信息。在图4所示的流程图中,例示了将判定使用者就座的判定结果用作取得图像信息的触发的情况进行说明。但是,不限定于此。作为取得图像信息的触发,也可以使用其他内容的判定结果,也可以使用判定就座的判定结果和其他内容的判定结果这双方,在满足综合的条件的情况下取得图像信息。其他内容的判定结果,例如是使用红外线等对人体的存在进行探测的人体探测传感器的探测结果。在该情况下,例如在由人体探测传感器探测到使用者已接近于便器30的情况下,开始取得图像。
58.接着,在步骤s12中,判定装置10进行判定处理。针对判定处理的内容,使用图5进行说明。在步骤s13中,判定装置10将判定结果存储至判定结果存储部17。接着,在步骤s14中,判定装置10通过与便器装置3的通信,判定便器装置3的使用者是否已离座。判定装置10在判定为使用者已离座的情况下,结束处理。另一方面,判定装置10在判定为使用者未离座的情况下,在步骤s15中,以一定时间待机,并返回步骤s11。
59.使用图5,说明判定装置10所进行的判定处理的流程。在步骤s122中,判定装置10使用尿有无估计模型161,估计图像中的尿的有无。
60.在步骤s123中,判定装置10使用便有无估计模型162,估计图像中的便的有无。在步骤s124中,判定装置10基于估计结果判定便的有无。
61.判定装置10在步骤s124中估计为有便的情况下(在图5中,步骤s124:是),在步骤s125中,使用便性状估计模型163估计便的性状。
62.在步骤s126中,判定装置10使用纸使用有无估计模型165估计在图像中纸有无使用。
63.判定装置10在步骤s126中估计为纸有使用的情况下(在图5中,步骤s127:是),在步骤s128中,通过使用纸张量估计模型166来估计纸的使用量。在步骤s129中,判定装置10判定使用后的便器30的清洗方法。
64.针对判定装置10判定清洗方法的处理的内容,使用图6进行说明。在图6所示的流程图中,例示了判定装置10将清洗方法判定为“大”、“中”、“小”或者“无”这四个其中一个的情况进行说明。清洗方法中的“大”、“中”、“小”,意味着清洗的强度按照“大”、“中”、“小”的顺序变小。清洗的强度是对便盆32进行清洗的强弱的程度,例如,强度越小则清洗水s的量越少,强度越大则清洗水s的量越多。也可以是,强度越小则清洗的次数越少,强度越大则清洗的次数越多。在清洗方法为“无”的情况下,意味着不进行便盆32的清洗。
65.在步骤s130中,判定装置10判定纸有无使用。判定装置10在判定为使用了纸的情况下,在步骤s131中,判定纸的使用量是否多。判定装置10在由步骤s126估计的纸的量为规定的阈值以上的情况下判定为纸的使用量多,在小于规定的阈值的情况下判定为纸的使用量少。判定装置10在判定为纸的使用量多的情况下(在图6中,步骤s131:是),在步骤s132中,将清洗方法判定为“大”。
66.判定装置10在判定为纸的使用量少的情况下(在图6中,步骤s131:否),在步骤s133中,判定是否有便。判定装置10按照由步骤s123估计的便的有无的估计结果,判定便的有无。判定装置10在判定为有便的情况下(在图6中,步骤s133:是),在步骤s134中,判定便的量是否多。判定装置10在由步骤s125估计的便的性状中便的量被估计为规定的阈值以上的情况下判定为便的量多,在小于规定的阈值的情况下判定为便的量少。判定装置10在判定为便的量多的情况下(在图6中,步骤s134:是),在步骤s132中,将清洗方法判定为“大”。
67.判定装置10在判定为便的量少的情况下(在图6中,步骤s134:否),在步骤s135中,判定便的形状是否为水状便以外。判定装置10在由步骤s125估计的便的性状中便的形状被估计为不是水状便(也就是说,硬便、普通便、软便、泥状便的其中一个)的情况下,判定为便的形状为水状便以外,在便的形状被估计为水状便的情况下判定为便的形状为水状便。判定装置10在判定为便的形状为水状便以外的情况下(在图6中,步骤s135:是),在步骤s136中,将清洗方法判定为“中”。另一方面,判定装置10在判定为便的形状为水状便的情况下(在图6中,步骤s135:否),在步骤s138中,将清洗方法判定为“小”。
68.判定装置10在由步骤s133判定为无便的情况下(在图6中,步骤s133:否),在步骤s137中,判定是否有尿。判定装置10按照由步骤s122估计的尿的有无的估计结果,判定尿的有无。判定装置10在判定为有尿的情况下(在图6中,步骤s137:是),在步骤s138中,将清洗方法判定为“小”。另一方面,判定装置10在判定为无尿的情况下(在图6中,步骤s137:否),在步骤s139中,将清洗方法判定为“无”。
69.如图6所示的流程图中的例子那样,判定装置10通过与估计尿的有无、便的有无、纸的有无而得到的结果的组合相应地分别判定清洗方法,能够精细地控制清洗水量,能够在进行充分清洗的同时抑制水的浪费,进行恰当的节水。
70.判定装置10针对使用者是否进行了排泄,也可以使用步骤s122所示的估计尿的有无的估计结果、以及步骤s123所示的估计便的有无的估计结果,来判定使用者是否进行了排泄。在该情况下,判定装置10在估计为无尿且估计为无便的情况下,判定为使用者未进行排泄。
71.如以上所说明的那样,第一实施方式的判定装置10具备图像信息取得部11、分析部12和判定部13。图像信息取得部11取得对便盆32的内部空间34进行摄像而得到的对象图像的图像信息。分析部12通过使图像信息输入至学习完毕模型,从而针对对象图像进行与排泄有关的判定事项的估计。判定部13基于估计结果针对图像进行判定事项的判定。学习完毕模型是使用dl的方法而被学习的模型。在使用dl的方法进行学习的情况下,仅作为对图像中的排泄的有无等判定项目进行判断的结果而进行贴标(labeling)等对应即可,无需从图像提取特征量来制成学习数据。因此,无需研究通过怎样的方法提取怎样的特征量为佳。即,第一实施方式的判定装置10在使用机器学习进行的与排泄行为有关的分析中,能够减少开发所需的时间。
72.在第一实施方式的判定装置10中,对象图像是对排泄后的便盆32的内部空间34进行摄像而得到的图像。由此,例如与将通过对排泄物下落中的图像进行连拍而得到的数百张图像作为判定对象的情况相比,能够抑制图像的张数。因此,能够使估计或判定所需的负荷减小,减少开发所需的时间。
73.在第一实施方式的判定装置10中,判定事项包含尿的有无、便的有无、便的性状之
中的至少其中一个。由此,在第一实施方式的判定装置10中,能够进行与排泄物有关的判定。
74.在第一实施方式的判定装置10中,判定事项包含在排泄中纸有无使用、以及在使用了纸的情况下的纸的使用量。由此,在第一实施方式的判定装置10中,能够进行与排泄中的纸的使用有关的判定,使用判定结果,例如能够作为用于判定便器30的清洗方法的指标使用。
75.在第一实施方式的判定装置10中,判定部13判定对对象图像所示的状况下的便器30进行清洗的清洗方法。由此,在第一实施方式的判定装置10中,不仅能够进行排泄物的判定,而且能够进行便器30的清洗方法的判定。
76.在第一实施方式的判定装置10中,判定事项包含便的性状以及在排泄中使用的纸的量之中的至少一个,分析部12估计对象图像中的便的性状以及在排泄中使用的纸的量之中的至少一个,判定部13使用分析部12的估计结果,判定对对象图像所示的状况下的便器30进行清洗的清洗方法。由此,在第一实施方式的判定装置10中,能够判定与排泄物或纸的使用量相应的恰当的清洗方法。
77.在本实施方式中,例示了进行排泄物的判定和清洗方法的判定的情况进行说明。但是,也可以仅进行排泄物的判定,或者仅进行清洗方法的判定。
78.在第一实施方式的判定装置10中,判定事项包含判定是否进行了排泄。由此,例如在高龄者设施等中对高龄者进行看护的情况下,能够掌握高龄者是否在便器装置3中进行了排泄。基于在将高龄者引导到厕所的情况下是否依靠自身的力量进行了排泄,或者是否未排泄,还能够对看护的内容进行研究。也可以使用与排泄物有关的判定结果来判定使用者的健康状态。
79.(第二实施方式)
80.在本实施方式中,与上述的实施方式的不同点在于,不将纸有无使用等作为判定对象,而仅将便的性状作为判定的对象。与上述的实施方式的不同点在于,针对对象图像进行前处理。前处理是在使模型对学习用的图像进行机器学习之前对于学习用的图像进行的处理。前处理是使未学习的图像输入至学习完毕模型之前对于未学习的图像进行的处理。在以下的说明中,仅说明与上述的实施方式不同的结构,针对与上述的实施方式同等的结构附加相同的标号并省略其说明。
81.在图7中,表示了想要将特定的物体分类为类型a、b、c这三个种类时的概念图。一般而言,在想要将便等可能成为各种各样的性状的物体基于其性状分类为类型a、b、c这三个种类的情况下,难以将全部物体明确分类。即,很多情况下发生类型a、b、c各自相互混杂的状况。例如,如图7所示,产生如下区域:能够明确分类为类型a的区域e1、被分类为类型a或者b的类型a与b混杂的区域e2、能够明确分类为类型b的区域e3、被分类为类型b或者c的类型b与c混杂的区域e4、能够明确分类为类型c的区域e5、被分类为类型c或者a的类型c与a混杂的区域e6。
82.在通过dl构筑了将便的性状分类为类型a、b、c这三个种类的学习完毕模型的情况下,考虑在类型a、b、c各自相互混杂的区域中,估计的精度降低。特别是,如果水状便下落至便盆32中蓄积的清洗水s的积水面,则便的颜色从下落的水状便向清洗水s转移并扩展。由此,即使在水状便之前有被排泄的性状与水状便不同的便的情况下,性状与水状便不同的
便和颜色转移到的清洗水s之间的颜色之差几乎消失。可以想到,在该情况下,学习完毕模型不再能够对具有与水状便不同的性状的便的性状进行辨识,虽然有性状与水状便不同的便,也会估计为水状便等而发生估计错误。在学习完毕模型的估计有错误的情况下,对象图像的判定产生错误。
83.作为其对策,在本实施方式中,通过前处理,将清洗水s的浑浊等可能成为估计错误的主要原因的要素(以下称为噪声成分)去除。由此,能够减少学习完毕模型的估计错误,减少对象图像的判定错误。
84.如图8所示,判定系统1a例如具备判定装置10a。判定装置10a具备图像信息取得部11a、分析部12a、判定部13a和前处理部19。
85.图像信息取得部11a取得对排泄前的便盆32的内部空间34进行摄像而得到的图像(以下称为基准图像)、以及对排泄后的便盆32的内部空间34进行摄像而得到的图像即对象图像各自的图像信息。排泄前,是便器装置3的使用者进行排泄之前的任意的时刻,例如是使用者进入厕所的隔间时或就座于便器30时。
86.前处理部19使用基准图像和对象图像的图像信息,生成差分图像。差分图像是表示基准图像与对象图像的差分的图像。差分是在对象图像中被摄像而在基准图像中未被摄像的内容。即,差分图像是在排泄后的对象图像中被摄像而在排泄前的基准图像中未被摄像的表现了排泄物的图像。
87.前处理部19将生成的差分图像的图像信息向分析部12a输出。前处理部19也可以将生成的差分图像的图像信息向图像信息存储部15存储。分析部12a使用学习完毕模型,进行差分图像中的便的性状的估计。分析部12a在估计中使用的学习完毕模型,是学习了表示排泄前后的图像的差分的学习用的图像与便的性状的评估的结果之间的对应关系而得到的模型。在制成学习完毕模型时的学习中使用的图像、即表示排泄前后的图像的差分的学习用的图像,是“学习用差分图像”的一例。
88.判定部13a基于由分析部12a估计的便的性状,判定对象图像所示的便的性状。判定部13a也可以基于由分析部12a估计的便的性状,判定使用者的排泄的状况。针对判定部13a判定使用者的排泄的状况的方法,在后述的本实施方式的流程图中进行说明。
89.针对前处理部19生成差分图像的方法,以基准图像、对象图像和差分图像是各图像的颜色由r(红(red))g(绿(green))b(蓝(blue))表现的rgb图像的情况为例进行说明。但是,各图像不限定于由rgb表现颜色的图像,即使在rgb图像以外的图像(例如,lab图像或ycbcr图像)的情况下,也能够以同样的方法生成。rgb值是表示图像的颜色的信息,是“颜色信息”的一例。
90.前处理部19基于基准图像中的规定的像素的rgb值和所述对象图像中的与该规定的像素对应的像素中的rgb值之间的差分,决定所述差分图像中的与该规定像素对应的像素的rgb值。与规定的像素对应的像素,是在图像中处于相同的或者附近的位置坐标的像素。差分表示两个像素中的颜色的差分,例如基于rgb值的差异被判定。例如,前处理部19在rgb值表示相同的颜色的情况下判定为没有差分,在rgb值未表示相同的颜色的情况下判定为有差分。
91.例如,前处理部19在基准图像中的规定像素的rgb值是(255,255,0)(即,黄色),且对象图像中的规定像素的rgb值是(255,255,0)(即,黄色)的情况下,由于两个像素中的颜
色没有差分,因此进行将差分图像中的规定像素的rgb值设为表示没有差分的规定的颜色(例如,白色)的屏蔽(mask)处理。
92.前处理部19在基准图像中的规定像素的rgb值是(255,255,0)(即,黄色),而对象图像中的规定像素的rgb值是(255,0,0)(即,红色)的情况下,由于两个像素中的颜色有差分,因此将差分图像中的规定像素的rgb值,设为对象图像中的规定像素的rgb值(255,0,0)(即,红色)。
93.前处理部19也可以在两个像素中的颜色有差分的情况下,设为表示有差分的预先决定的规定的颜色(例如,黑色)。
94.前处理部19也可以在两个像素中的颜色有差分的情况下,设为与差分的程度相应地预先决定的规定的颜色。差分的程度例如是与颜色空间中的rgb值的矢量距离相应地算出的值。在该情况下,前处理部19将两个像素中的颜色的差分与该差分的程度相应地分类为多类。例如,在差分的程度被分类为大、中、小这三个种类的情况下,前处理部19也可以针对差分的程度大的像素,将差分图像中的该像素的rgb值设为黑色,针对差分的程度为中程度的像素,将差分图像中的该像素的rgb值设为灰色,针对差分的程度小的像素,将差分图像中的该像素的rgb值设为浅灰色等,生成差分图像。
95.可以考虑,由于使用者的就座的状态等影响,作为被摄体的便盆32的内部空间34被照射的光的光量发生变化。在光量发生了变化的情况下,即使是排泄的前后没有变化的地方,颜色的浓淡也有时发生变化。在这样的情况下,可以考虑,前处理部19不免将颜色的浓淡的变化判定为颜色的差分。
96.作为其对策,前处理部19也可以与基准图像中的规定像素的颜色的比率以及对象图像中的规定像素的颜色的比率相应地,决定差分图像中的规定像素的颜色。颜色的比率是rgb各个颜色的比率,例如通过相对于规定的基准值的比例来表示。也就是说,rgb值(r,g,b)中的颜色的比率是r/l:g/l:b/l。l表示规定的基准值。规定的基准值l可以是任意的值。规定的基准值l既可以是与rgb值无关而固定的值,也可以是根据rgb值而变动的值(例如rgb值的r值等)。
97.例如,前处理部19在基准图像中的规定像素是灰色(即,rgb值(128,128,128)),而对象图像中的规定像素是浅灰色(即,rgb值(192,192,192))的情况下,根据两个像素中的颜色的比率是相同的比率,判定为两个像素中的颜色没有差分。
98.前处理部19在基准图像中的规定像素是黄色(即,rgb值(255,255,0)),而对象图像中的规定像素是红色(即,rgb值(255,0,0))的情况下,根据两个像素中的颜色的比率不是相同的比率,判定为两个像素中的颜色有差分。
99.在图9的左侧作为基准图像的例子表示了图像g1,在中央作为对象图像的例子表示了图像g2,在右侧作为差分图像的例子表示了图像g3。如图9的图像g1所示,在基准图像中,摄像了排泄前的内部空间34,摄像了在内部空间34的大致中央处的开口部36中蓄积了清洗水s的情形。如图9的图像g2所示,在对象图像中,摄像了排泄后的内部空间34,摄像了在内部空间34的前侧和后侧的方向、清洗水s的上侧有排泄物t1、t2的情形。如图9的图像g3所示,在差分图像中,表现了作为基准图像与对象图像的差分的排泄物t1、t2。
100.针对第二实施方式所涉及的判定装置10a所进行的处理,使用图10进行说明。针对图10所示的流程图之中的步骤s20、s22、s25~s27以及s29,由于与图4的流程图的s10、s11、
s12~s14以及s15同样,因此省略其说明。
101.在步骤s21中,判定装置10a在判定为使用者已就座于便器30的情况下,生成基准图像。基准图像是表示排泄前的便盆32的内部空间34的图像。判定装置10a如果判定为使用者已就座于便器30,则向摄像装置4发送指示摄像的控制信号,从而取得基准图像的图像信息。
102.在步骤s23中,判定装置10a使用基准图像和对象图像,进行屏蔽处理。屏蔽处理是针对基准图像与对象图像没有差分的像素设为规定的颜色(例如白色)的处理。在步骤s24中,判定装置10a生成差分图像。差分图像例如是:针对基准图像与对象图像没有差分的像素进行屏蔽处理,而针对基准图像与对象图像有差分的像素反映了对象图像的像素值即rgb值的图像。
103.在步骤s28中,判定装置10a在判定为使用者已从便器30离座的情况下,将基准图像、对象图像以及差分图像的图像信息丢弃。具体而言,判定装置10a将图像信息存储部15中存储的基准图像、对象图像以及差分图像的图像信息删除。由此,能够抑制存储容量变得紧张。
104.针对图10的步骤s25所示的判定处理,作为与图4的步骤s12所示的处理同样而进行了说明。但是,在本实施方式中,至少进行以便的性状作为判定项目的判定处理即可。
105.在图10的步骤s25中,判定部13a使用估计差分图像中的便的性状的估计结果,判定使用者的排泄的状况。例如,判定部13a在便的形状是硬便的情况下判定为使用者的排便的状况有便秘倾向。判定部13a在便的形状是普通便的情况下判定为使用者的排便的状况很好。判定部13a在便的形状是软便的情况下判定为使用者的排便的状况是需要观察状况。判定部13a在便的形状是泥状便或者水状便的情况下判定为使用者的排便的状况有腹泻倾向。判定部13a也可以根据排便的状况判定使用者的健康状态。
106.如以上所说明的那样,在第二实施方式的判定装置10a中,前处理部19生成表示基准图像与对象图像的差分的差分图像。由此,在第二实施方式的判定装置10a中,能够在差分图像中表示在排泄前后有差异的部分,因此能够以更高精度掌握排泄物的性状,更加准确地判定该性状。
107.在第二实施方式的判定装置10a中,前处理部19基于表示基准图像中的规定像素的颜色的颜色信息与表示对象图像的像素中的与该规定像素对应的像素的颜色信息之间的差分,决定差分图像中的与该规定像素对应的像素的颜色信息。由此,在第二实施方式的判定装置10a中,能够在差分图像中表示在排泄前后颜色有差异的部分,因此能够取得与上述的效果同样的效果。
108.在第二实施方式的判定装置10a中,前处理部19将基准图像中的规定像素的rgb值和对象图像中的与该规定像素对应的像素的rgb值之间的差分,设为差分图像中的与该规定像素对应的像素的rgb值。由此,在第二实施方式的判定装置10a中,能够将排泄前后的颜色的差异作为rgb值的差异辨识,因此能够定量地算出颜色的差异,取得与上述的效果同样的效果。
109.在第二实施方式的判定装置10a中,前处理部19基于基准图像中的规定像素的表示r值、g值、b值的比率的颜色比率和对象图像中的与该规定像素对应的像素的颜色比率之间的差分,决定差分图像中的与该规定像素对应的像素的rgb值。由此,在第二实施方式的
判定装置10a中,即使在排泄前后被摄体被照射的光量不同等、背景色产生了差异的情况下,也不会将该差异误辨识为排泄物,而能够提取排泄物的性状,能够取得与上述的效果同样的效果。
110.上述以图像信息取得部11a取得基准图像的图像信息的情况为例进行了说明。但是,本公开不限定于此。例如,基准图像的图像信息也可以由任意的功能部取得,也可以预先存储于图像信息存储部15。
111.(第二实施方式的变形例1)
112.在本变形例中,与上述的实施方式的不同点在于,作为前处理,生成将对象图像分割而成的分割图像。在以下的说明中,仅说明与上述的实施方式不同的结构,针对与上述的实施方式同等的结构附加相同的标号并省略其说明。
113.一般而言,便盆32形成为随着从便盆32的边缘部朝向开口部36而向下侧倾斜。因此可以考虑,在有多个便下落至便盆32中的情况下,先下落的便被后下落的便推压,沿着便盆32的倾斜面向下侧移动。即,具有先下落的便向开口部36的前侧移动的性质。
114.利用该性质,在本变形例中,考虑排泄物的排出的时间序列进行估计。具体而言,将对象图像分割为前侧和后侧。并且,将分割了对象图像的前侧而成的图像(以下称为前侧分割图像)中被摄像的排泄物视为旧便,将分割了对象图像的后侧而成的图像(以下称为后侧分割图像)中摄像的排泄物视为新便,来判定便的性状。由此,针对使用者的排便的状况,通过对旧便进行判定,能够基于与当前的状态接近的便进行判定。
115.在本变形例中,前处理部19生成分割图像。分割图像是包含对象图像的一部分区域的图像,例如是前侧分割图像以及后侧分割图像。将对象图像分割为前侧分割图像和后侧分割图像的边界可以任意设定,例如利用经过便盆32中蓄积的清洗水s中的积水面的中心且沿左右方向(即,将左侧与右侧连结的方向)的线进行分割。
116.分割图像不限定于上述的前侧分割图像和后侧分割图像。分割图像是至少包含对象图像中的一部分区域的图像即可。对象图像既可以是在前后方向(即,将前侧与后侧连结的方向)上被分割为三个区域的图像,也可以是前侧分割图像进一步在左右方向上被分割为多个区域的图像。根据对象图像,既可以生成一个分割图像,也可以生成多个分割图像。在根据对象图像生成多个分割图像的情况下,将多个分割图像所示的区域结合而成的区域,既可以是对象图像所示的区域整体,也可以是一部分区域。
117.前处理部19将生成的分割图像的图像信息向分析部12a输出。前处理部19也可以将生成的分割图像的图像信息存储至图像信息存储部15。分析部12a使用学习完毕模型,对分割图像中的便的性状进行估计。分析部12a在估计中使用的学习完毕模型,是学习了将对排泄中的便盆32的内部空间34进行摄像而得到的图像分割后的学习用的图像与便的性状的评估结果之间的对应关系而得到的模型。
118.判定部13a基于由分析部12a估计的分割图像中的便的性状,判定对象图像所示的状况下的使用者的排泄的状况。判定部13a在有多个根据对象图像生成的分割图像的情况下,将分割图像各自的估计结果综合看待并判定使用者的排泄的状况。针对判定部13a综合地判定使用者的排泄的状况的方法,在后述的本变形例的流程图中进行说明。
119.针对在制成学习完毕模型时的学习中使用的图像、即、将对排泄中的便盆32的内部空间34进行摄像而得到的图像分割后的学习用的图像进行说明。本变形例中的作为学习
用的图像的分割图像,是“学习用分割图像”的一例。作为学习用的图像的分割图像,是将过去在排泄时摄像的便盆32的内部空间34的各种各样的图像的一部分区域分割后的图像。前处理部23将图像分割的方法可以是任意的,但优选是与前处理部19的分割同样的方法。通过设为同样的方法,能够期待提高使用学习完毕模型进行估计的精度。与使学习完毕模型学习对象图像整体的情况相比,使其学习对象图像的一部分区域、也就是说比对象图像小的区域,因此能够使学习完毕模型成为精度更高地估计区域的状态的模型。
120.在图11的左侧作为对象图像的例子表示了图像g4,在中央作为前侧分割图像的例子表示了图像g5,在右侧作为后侧分割图像的例子表示了图像g6。如图11的图像g4所示,在对象图像中,摄像了内部空间34,摄像了包含内部空间34的大致中央处的开口部36中蓄积了清洗水s的情形在内的内部空间34整体。如图11的图像g5所示,在前侧分割图像中,提取了内部空间34中的前侧的区域,提取了比经过在开口部36中蓄积了清洗水s的积水面的中心且沿左右方向的边界线靠前侧的区域。如图11的图像g6所示,在后侧分割图像中,提取了内部空间34中的后侧的区域,提取了比经过积水面的中心且沿左右方向的边界线靠后侧的区域。
121.针对第二实施方式的变形例1所涉及的判定装置10a所进行的处理,使用图12进行说明。图12是表示第二实施方式的变形例1所涉及的判定装置10a所进行的处理的流程的流程图。针对图12所示的流程图之中的步骤s30、s31、s33、s37以及s42,由于与图4的流程图的s10、s11、s14、s15以及s13同样,因此省略其说明。
122.在步骤s32中,判定装置10a使用对象图像生成分割图像。分割图像例如是表示对象图像中被摄像的区域中的前侧的区域的前侧分割图像、以及表示其后侧的区域的后侧分割图像。
123.在步骤s34中,判定装置10a针对前侧分割图像以及后侧分割图像各自的分割图像进行判定处理。该判定处理的内容与图10的流程图中的步骤s25所示的处理同样,因此省略其说明。
124.判定装置10a在未判定为使用者已从便器30离座的情况下(在图12中,步骤s33:否),在步骤s35中,判定是否进行了便器30中的局部清洗的操作,在进行了便器30中的局部清洗的操作的情况下,进行步骤s34所示的处理。判定装置10a在未判定为进行了便器30中的局部清洗的操作的情况下(在图12中,步骤s35:否),在步骤s36中,判定是否进行了便器30中的便器清洗的操作,在进行了便器30中的便器清洗的操作的情况下,进行步骤s34所示的处理。
125.在步骤s38中,判定装置10a判定对前侧分割图像以及后侧分割图像这双方是否都有判定结果。对双方都有判定结果,表示在双方中都有便的图像,且针对各个便的图像有针对性状的判定结果。判定装置10a在对前侧分割图像以及后侧分割图像这双方都有判定结果的情况下,在步骤s39中,将前侧分割图像的判定结果作为旧便的判定结果,将后侧分割图像的判定结果作为新便的判定结果。
126.在步骤s40中,判定装置10a由判定部13a进行确定处理。确定处理是使用新便的判定结果以及旧便的判定结果来确定使用者的排泄的状况的处理。判定装置10a例如视为旧便反映当前的排泄的状况来确定排泄的状况。在确定处理中,判定部13a例如在旧便的性状被判定为硬便,且新便的性状被判定为普通便的情况下,判定为在排便时大肠中残留的硬
便被排出,使用者的排泄的状况有便秘倾向。另一方面,在确定处理中,判定部13a例如在旧便的性状被判定为普通便,且新便的性状被判定为泥状便的情况下,判定为使用者的排泄的状况良好。
127.判定装置10a在由判定部13a仅得到了前侧分割图像以及后侧分割图像中的一方的判定结果的情况下,在步骤s41中,判定是否有前侧分割图像的判定结果。在有前侧分割图像的判定结果的情况下,使用前侧分割图像的判定结果进行步骤s40所示的处理。在没有前侧分割图像的判定结果的情况下,使用后侧分割图像的判定结果进行步骤s40所示的处理。没有前侧分割图像的判定结果的情况,例如是在前侧分割图像中未摄像到排泄物,无法判定便的性状的情况。
128.如以上所说明的那样,在第二实施方式的变形例1所涉及的判定装置10a中,前处理部19生成包含对象图像中的一部分区域的分割图像。由此,在第二实施方式的变形例1所涉及的判定装置10a中,能够将对象图像中的一部分区域作为判定的对象,通过将对象图像整体作为判定对象,也能够对较小的区域详细地进行判定,能够以更高精度进行判定。
129.在第二实施方式的变形例1所涉及的判定装置10a中,前处理部19生成至少表示对象图像中的便盆中的前侧的区域的前侧分割图像。由此,在第二实施方式的变形例1所涉及的判定装置10a中,在对象图像中新便和旧便被摄像的情况下,能够将视为摄像了新便的区域作为分割图像。即使在对象图像中新便和旧便未都被摄像的情况下,也能够将便被摄像的可能性高的区域作为分割图像,取得与上述的效果同样的效果。
130.在第二实施方式的变形例1所涉及的判定装置10a中,前处理部19生成前侧分割图像和后侧分割图像,分析部12a针对前侧分割图像进行与判定事项有关的估计,且针对后侧分割图像进行与判定事项有关的估计,判定部13a使用针对前侧分割图像的估计结果以及针对后侧分割图像的估计结果,针对所述对象图像进行与所述判定事项有关的判定。由此,在第二实施方式的变形例1所涉及的判定装置10a中,能够使用前侧分割图像和后侧分割图像的估计结果,综合地判定使用者的排泄的状况,与使用前侧分割图像或者后侧分割图像的其中一方的估计结果的情况相比,能够进行精度更高的判定。
131.在第二实施方式的变形例1所涉及的判定装置10a中,前处理部19将针对前侧分割图像的估计结果,作为比针对后侧分割图像的估计结果在时间序列上更早的估计结果,针对所述对象图像进行与所述判定事项有关的判定。由此,在第二实施方式的变形例1所涉及的判定装置10a中,能够将针对前侧分割图像的估计结果视为旧便的估计结果,且将针对后侧分割图像的估计结果视为新便的估计结果,考虑排泄的时间序列进行判定,能够针对使用者的排泄的状况进行更接近于当前的状态的高精度的判定。根据便盆32的形状,先下落的便移动的方向变化,因此与前侧分割图像以及后侧分割图像相对应的时间序列的关系性也可以反转。即,上述作为前侧分割图像比后侧分割图像在时间序列上早进行了说明。但是,不限定于此,也可以视为前侧分割图像比后侧分割图像在时间序列上新,来进行判定并确定的处理。
132.(第二实施方式的变形例2)
133.在本变形例中,与上述的实施方式的不同点在于,作为前处理,生成表示对象图像整体的整体图像、以及将对象图像的一部分切出的部分图像。在以下的说明中,仅说明与上述的实施方式不同的结构,针对与上述的实施方式同等的结构附加相同的标号并省略其说
明。
134.一般而言,如果想要使用机器学习的方法根据图像整体估计详细的判定内容,则需要很高的运算能力,装置成本增大。例如,如果使模型中使用的dnn中的层数增加,则节点数增加,因此一次尝试所需的运算的次数增加,处理负荷增大。为了使模型能够估计详细的内容,也就是说使模型对于学习数据的输入的输出与学习数据中的输出之间的误差最小,需要变更权重w与偏差成分b变更并且反复多次进行尝试。为了在现实的时间内使这样的反复的尝试收敛,需要由能够快速进行处理的装置进行庞大的运算。即,为了详细地分析对象图像的整体,需要高性能的装置,装置成本增大。
135.对象图像是便盆32的内部空间34整体被摄像的图像。即,在对象图像中存在:排泄物被摄像的区域、以及排泄物未被摄像的区域。因此考虑如下方法:从对象图像切出被认为排泄物多下落到的特定的区域(例如,开口部36的附近区域),针对切出的区域估计详细的判定内容。由此,能够缩小作为分析对象的图像的区域,能够抑制装置成本增大。
136.本来,排泄物向便盆32中的何处的区域下落是不清楚的。根据使用者的身体状况,便的性状发生变化。因此,即使排泄物下落的区域是便盆32中的特定的区域的情况较多,也不限于排泄物始终仅向该特定的区域下落,也可能存在向周围飞散的情况。如果虽然向周围飞散,却不使用周围的图像,而仅使用特定的区域中的图像进行判定,则有可能进行与实际情况不同的判定。
137.作为其对策,在本变形例中,通过前处理,生成表示对象图像整体的整体图像、以及将对象图像的一部分切出的部分图像。
138.针对整体图像,进行不详细的全局性的判定,由此抑制装置成本增大。全局性的判定,是与判定便的性状相比为整体性以及全局性的判定,例如,判定便有无飞散。便有无飞散,并不是判定飞散的便的性状,因此与判定便的性状的情况相比,能够认为是比较粗略且容易的判定。针对整体图像进行的便有无飞散所涉及的判定,是“第一判定事项”的一例。
139.针对部分图像,进行针对比整体图像所涉及的判定更详细的判定项目的判定。详细的判定项目,例如是判定便的性状。由于判定对象是将图像的区域缩小后的部分图像,因此即使不使用高性能的装置,也能够进行详细的判定,抑制了装置成本增大。针对部分图像进行的便的性状所涉及的判定,是“第二判定事项”的一例。
140.在本变形例中,前处理部19生成整体图像以及部分图像。整体图像是表示对象图像整体的图像,例如是对象图像本身。部分图像是将对象图像中的一部分区域切出的图像,例如是从对象图像将开口部36的附近区域切出的图像。作为部分图像,可以任意设定将对象图像中的何处的区域切出,例如是与便器30的形状相应地在出厂时等决定的固定的区域。
141.前处理部19将生成的整体图像以及部分图像的图像信息向分析部12a输出。前处理部19也可以将生成的整体图像以及部分图像的图像信息存储至图像信息存储部15。
142.分析部12a使用学习完毕模型,对整体图像中便有无飞散进行估计。对整体图像中便有无飞散的估计是“第一估计”的一例。
143.分析部12a使用学习完毕模型,估计部分图像中的便的性状。估计部分图像中的便的性状的处理是“第二估计”的一例。
144.判定部13a基于由分析部12a估计的整体图像中便有无飞散、以及部分图像中的便
的性状,判定对象图像所示的状况下的使用者的排泄的状况。针对判定部13a基于整体图像中的估计结果以及部分图像中的估计结果判定使用者的排泄的状况的方法,在后述的本变形例的流程图中进行说明。
145.针对本变形例中使用的使学习完毕模型学习的学习数据进行说明。在整体图像的估计中使用的学习完毕模型,是学习了对排泄中的便盆32中的内部空间34整体进行摄像而得到的学习用的整体图像与评估便有无飞散的评估结果之间的对应关系而得到的模型。学习用的整体图像是过去在排泄时摄像的表示便盆32中的内部空间34整体的各种各样的图像。学习用的整体图像、即对排泄中的便盆32中的内部空间34整体进行摄像而得到的学习用的图像,是“学习用整体图像”的一例。在部分图像的估计中使用的学习完毕模型,是学习了从对排泄中的便盆32中的内部空间34整体进行摄像而得到的图像将一部分切出的学习用的部分图像与评估便的性状的评估结果之间的对应关系而得到的模型。学习用的部分图像是将整体图像的一部分切出的图像。学习用的部分图像、即从对排泄中的便盆32中的内部空间34整体进行摄像而得到的图像将一部分切出的学习用的图像,是“学习用部分图像”的一例。生成学习用的整体图像以及学习用的部分图像的方法可以是任意的,但优选是与前处理部19生成整体图像以及部分图像同样的方法。通过使用同样的方法,能够期待提高使用学习完毕模型进行估计的精度。
146.图13是说明第二实施方式的变形例2所涉及的前处理部19所进行的处理的图。在图13的左侧作为对象图像的例子表示了图像g7,在中央作为整体图像的例子表示了图像g8,在右侧作为部分图像的例子表示了图像g9。如图13的图像g7所示,在对象图像中,摄像了内部空间34,摄像了包含内部空间34的大致中央处的开口部36中蓄积了清洗水s的情形在内的内部空间34整体。如图13的图像g8所示,在整体图像中,表示了对象图像的整体。整体图像既可以是对象图像本身,也可以是从对象图像提取了其整体而得到的图像。如图13的图像g9所示,在部分图像中,提取内部空间34的大致中央、开口部36的附近的区域,提取了清洗水s被蓄积的积水面及其周边的区域。
147.针对第二实施方式的变形例2所涉及的判定装置10a所进行的处理,使用图14进行说明。图14是表示第二实施方式的变形例2所涉及的判定装置10a所进行的处理的流程的流程图。针对图14所示的流程图之中的步骤s50、s51、s53、s57以及s62,由于与图4的流程图的s10、s11、s14、s15以及s13同样,因此省略其说明。针对图14所示的流程图之中的步骤s55以及s56,由于与图12的流程图的s35以及s36同样,因此省略其说明。
148.在步骤s52中,判定装置10a使用对象图像生成整体图像以及部分图像。整体图像例如是表示对象图像中被摄像的区域整体的图像。部分图像例如是表示对象图像中被摄像的区域中的特定的一部分区域的图像。
149.在步骤s54中,判定装置10a针对整体图像以及部分图像各自进行判定处理。判定装置10a针对整体图像进行全局性的判定,例如判定便有无飞散。判定装置10a使用学习完毕模型来估计整体图像中便有无飞散,将估计的结果作为判定整体图像中便有无飞散的判定结果。学习完毕模型是通过使用将学习用的整体图像与判定便有无飞散的判定结果相对应的学习数据进行学习从而制成的模型。判定装置10a针对部分图像进行详细的判定,例如判定便的性状。判定装置10a使用学习完毕模型估计部分图像中的便的性状,将估计的结果作为判定部分图像中的便的性状的判定结果。学习完毕模型是通过使用将学习用的部分图
像与判定便的性状的判定结果相对应的学习数据进行学习从而制成的模型。
150.在步骤s58中,判定装置10a判定对整体图像以及部分图像这双方是否都有判定结果。对双方都有判定结果,表示对整体图像判定了便有无飞散,且针对部分图像判定了便的性状。
151.判定装置10a在由判定部13a对整体图像以及部分图像这双方都得到了判定结果的情况下,在步骤s59中,使用整体图像的判定结果,对部分图像的判定结果进行校正。对部分图像的判定结果进行校正,是指使用整体图像的判定结果,对部分图像的判定结果进行变更或者补充。例如,判定部13a在部分图像的判定结果是便的性状为软便的情况下,而根据整体图像的判定结果判定为便有飞散的情况下,将排便的状况校正为有腹泻倾向。另一方面,判定部13a在根据整体图像的判定结果判定为便无飞散的情况下,不对作为部分图像的判定结果的排便的状况进行校正。
152.在步骤s60中,判定装置10a由判定部13a进行确定处理。确定处理是使用整体图像的判定结果以及部分的判定结果来判定使用者的排便的状况等的处理。
153.判定装置10a在由判定部13a对整体图像以及部分图像这双方没有都得到判定结果的情况下,在步骤s61中,判定是否有部分图像的判定结果。在有部分图像的判定结果的情况下,使用部分图像的判定结果进行步骤s60所示的处理。在没有部分图像的判定结果的情况下,使用整体图像的判定结果进行步骤s60所示的处理。没有部分图像的判定结果的情况,例如是在部分图像中排泄物未被摄像,无法判定便的性状的情况。
154.如以上所说明的那样,在第二实施方式的变形例2所涉及的判定装置10a中,前处理部19根据对象图像生成整体图像和部分图像。分析部12a使用学习完毕模型根据整体图像进行作为全局性的估计的第一估计,并且使用别的学习完毕模型根据部分图像进行作为详细的估计的第二估计。由此,在第二实施方式的变形例2所涉及的判定装置10a中,通过使用像素数多的整体图像,进行比较容易的全局性的估计,与根据整体图像进行比较困难的详细的估计的情况相比,能够使运算处理的负荷减小,抑制装置成本增大。通过使用像素数较少的部分图像进行详细的估计,与根据像素数较多的整体图像进行详细的估计的情况相比,能够使运算处理的负荷减小,抑制装置成本增大。
155.在第二实施方式的变形例2所涉及的判定装置10a中,前处理部19生成至少包含对象图像中的便盆32的开口部36的部分图像。由此,在第二实施方式的变形例2所涉及的判定装置10a中,能够将排泄物下落的可能性高的区域作为部分图像切出,能够使用部分图像进行排泄物所涉及的详细的判定。
156.在第二实施方式的变形例2所涉及的判定装置10a中,前处理部19估计便有无飞散作为全局性的估计(即,第一估计),估计便的性状作为详细的估计(即,第二估计)。由此,在第二实施方式的变形例2所涉及的判定装置10a中,能够不仅估计便的性状而且估计有无飞散,能够使用双方的估计结果以更高精度进行判定。
157.在第二实施方式的变形例2所涉及的判定装置10a中,使用针对全局性的估计(即,第一估计)的估计结果,对详细的估计(即,第二估计)的估计结果进行校正。由此,在第二实施方式的变形例2所涉及的判定装置10a中,能够对详细的估计进行校正,能够以更高精度进行判定。
158.(第三实施方式)
159.在本实施方式中,与上述的实施方式的不同点在于,提取对象图像中的对象区域。对象区域是本实施方式中的成为判定对象的区域,是成为判定排泄物的性状的对象的区域。即,判定区域是在对象图像中被估计为摄像了排泄物的区域。在以下的说明中,仅说明与上述的实施方式不同的结构,针对与上述的实施方式同等的结构附加相同的标号并省略其说明。
160.如图15所示,判定装置10b具备分析部12b和判定部13b。分析部12b是“提取部”的一例。
161.分析部12b基于对象图像中的图像的颜色与排泄物被设想为的规定的颜色(以下称为设想颜色)的差异、即色差,提取与设想颜色接近的颜色的区域作为判定区域。分析部12b基于双方的颜色在颜色空间上的距离(以下称为空间距离),决定对象图像中的颜色是否是与设想颜色接近的颜色。在两个颜色的空间距离小的情况下,表示色差小,表示该两个颜色是相互接近的颜色。另一方面,在空间距离大的情况下,表示色差大,表示该两个颜色是相互远离的颜色。空间距离是“设想颜色的特性”的一例。
162.针对分析部12b算出空间距离的方法进行说明。在以下,例示对象图像是rgb图像且设想颜色是由rgb值表示的颜色的情况进行说明。但是,不限定于此。在对象图像是rgb图像以外的图像(例如,lab图像或ycbcr图像)的情况、或者设想颜色是由rgb值以外的颜色(例如,lab值或ycbcr值)表示的情况下,也能够利用同样的方法提取判定区域。在以下,例示设想颜色是便的颜色的情况进行说明。但是,不限定于此。设想颜色只要是排泄物被设想为的颜色即可,例如也可以是尿的颜色。
163.分析部12b例如计算颜色空间中的欧几里得距离作为空间距离。分析部12b使用以下的(1)式,算出欧几里得距离。在(1)式中,z1是欧几里得距离,δr是对象图像中的规定的像素x与设想颜色y在r值上的差分,δg是像素x与设想颜色y在g值上的差分,δb是像素x与设想颜色y在b值上的差分。对象图像中的规定的像素x中的rgb值是(red,green,blue),设想颜色y的rgb值是(rs,gs,bs)。
164.z1=(δr^2 δg^2 δb^2)^(1/2)
……
(1)
165.其中,
166.δr=red-rs
167.δg=green-gs
168.δb=blue-bs
169.分析部12b在算出空间距离时,也可以进行加权。加权用于对构成颜色的特定的元素中的差异进行强调,例如,通过对构成颜色的r元素、g元素以及b元素乘以相互不同的权重系数来进行。通过进行加权,能够与元素相应地强调与设想颜色的色差。
170.分析部12b例如能够使用以下的(2)式,算出加权的欧几里得距离。在(2)式中,z2是加权的欧几里得距离,r_coef是r元素的权重系数,g_coef是g元素的系数,b_coef是b元素的权重系数。δr是像素x与设想颜色y在r值上的差分,δg是像素x与设想颜色y在g值上的差分,δb是像素x与设想颜色y在b值上的差分。对象图像中的规定的像素x处的rgb值是(red,green,blue),设想颜色y处的rgb值是(rs,gs,bs)。
171.z2=(r_coef
×
δr^2
172. g_coef
×
δg^2
173. b_coef
×
δb^2)^(1/2)
……
(2)
174.其中,
175.r_coef>g_coef>b_coef
176.δr=red-rs
177.δg=green-gs
178.δb=blue-bs
179.作为设想颜色y的便的颜色的特性具有r元素比g元素强且g元素比b元素强的倾向。基于这样的构成颜色的各元素中的特征,分析部12b将r元素的权重系数设为比g元素的权重系数大的值。也就是说,在(2)式中,针对系数r_cofe、系数g_cofe以及系数b_cofe,r_coef>g_coef>b_coef的关系成立。
180.可以考虑,由于使用者的就座的状态等影响,作为被摄体的便盆32中的内部空间34被照射的光的光量发生变化。在光量发生了变化的情况下,即使是相同的颜色的排泄物,也有时被摄像为如同颜色的浓淡不同。在这样的情况下,虽然是相同的颜色,空间距离却被作为不同的距离算出。
181.作为其对策,分析部12b也可以算出构成颜色的各元素的比率(以下称为颜色比率)的欧几里得距离作为空间距离。颜色比率例如通过用r值、g值以及b值之中的设为基准的元素的值除其他元素的值来进行。通过使用颜色比率,能够算出不反映由于颜色的浓淡引起的差异的空间距离。
182.导出颜色比率时设为基准的元素可以任意决定,例如可以考虑设为该颜色的统治性的元素。例如,在便的颜色中,r元素是统治性的。因此,在本实施方式中,颜色比率通过r值、g值以及b值各自除以r值来制成。
183.例如,像素x(rgb值(red,green,blue))的颜色比率是(red/red,green/red,blue/red),也就是说(1,green/red,blue/red)。设想颜色y(rgb值(rs,gs,bs))的颜色比率是(rs/rs,gs/rs,bs/rs),也就是说(1,gs/rs,bs/rs)。
184.分析部12b能够使用以下的(3)式,算出颜色比率的欧几里得距离。在(3)式中,z3是颜色比率的欧几里得距离,δrp是像素x中的颜色比率与设想颜色y中的颜色比率在r元素上的差分,δgp是像素x中的颜色比率与设想颜色y中的颜色比率在g元素上的差分,δbp是像素x中的颜色比率与设想颜色y中的颜色比率在b元素上的差分。gr_rate是设想颜色y的颜色比率中的g元素的比率,br_rate是设想颜色y的颜色比率中的b元素的比率。对象图像中的规定的像素x的rgb值是(red,green,blue),设想颜色y的rgb值是(rs,gs,bs)。
185.z3=(δrp^2 δgp^2 δbp^2)^(1/2)
186.=(δgp^2 δbp^2)^(1/2)
……
(3)
187.其中,
188.δrp=red/red-rs/rs=0(零)
189.δgp=green/red-gr_rate
190.δbp=blue/red-br_rate
191.gr_rate=gs/rs
192.br_rate=bs/rs
193.1>gr_rate>br_rate>0
194.作为设想颜色y的便的颜色的特性具有r元素比g元素强(即,rs>gs)且g元素比b元素强(即,gs>bs)的倾向。比率gr_rate以及比率br_rate都成为0(零)~1之间的值。比率br_rate成为比比率gr_rate小的值。也就是说,在(3)式中,针对比率gr_rate和比率br_rate,1>gr_rate>br_rate>0的关系成立。
195.分析部12b在算出颜色比率的欧几里得距离时,也可以对构成颜色比率的特定的元素进行加权。分析部12b能够使用以下的(4)式,算出颜色比率的加权的欧几里得距离。在(4)式中,z4是颜色比率的加权的欧几里得距离。δrp是像素x与设想颜色y在r值上的差分,δgp是像素x与设想颜色y在g值上的差分,δbp是像素x与设想颜色y在b值上的差分。gr_coef是差分δgp的权重系数,br_coef是差分δbp的权重系数。对象图像中的规定的像素x处的rgb值是(red,green,blue),设想颜色y处的rgb值是(rs,gs,bs)。
196.z4=(gr_coef
×
δgp^2
197. br_coef
×
δbp^2)^(1/2)
……
(4)
198.其中,
199.gp_coef>bp_coef
200.δgp=green/red-gr_rate
201.δbp=blue/red-br_rate
202.gr_rate=gs/rs
203.br_rate=bs/rs
204.1>gr_rate>br_rate>0
205.在(4)式中,与(2)式中的系数g_cofe以及系数b_cofe的关系同样,针对系数gr_cofe以及系数br_cofe,gp_coef>bp_coef的关系成立。在(4)式中,与(3)式同样,针对比率gr_rate和比率br_rate,1>gr_rate>br_rate>0的关系成立。例如,设定为比率gr_rate=0.7,比率br_rate=0.3,系数gr_cofe=40,系数br_cofe=1。
206.分析部12b制成将按对象图像的每个像素算出的空间距离设为灰度的图像(以下称为灰度对象图像)。例如,分析部12b使用(5)式,对空间距离的尺度进行调整,换算为灰度值。在(5)式中,val是灰度值,amp是尺度调整用的系数,z是空间距离。空间距离z可以是rgb值的欧几里得距离z1、rgb值中的加权欧几里得距离z2、颜色比率中的欧几里得距离z3、颜色比率中的加权欧几里得距离z4的任一个。z_max是按对象图像的每个像素算出的空间距离的最大值,val_max是灰度值的最大值。
207.val=amp
×z……
(5)
208.其中,
209.amp=val_max/z_max
210.例如,在灰度对象图像中以0~255的256个阶段表示灰度的浓淡度的情况下,灰度值的最大值val_max是255。在该情况下,根据(5)式,以空间距离的最大值x_max成为灰度的最大值val_max(255)的方式,空间距离z被变换为灰度值val。由此,分析部12b制成通过0(即,白色)~255(即,黑色)的灰度值来表现与设想颜色的空间距离的灰度对象图像。
211.针对分析部12b提取判定区域的方法,使用图16进行说明。图16是说明第三实施方式所涉及的分析部12b所进行的处理的图。在图16中,在左右方向上表示灰度轴,表示了灰度值随着灰度轴从左向右而增加。
212.如图16所示,在灰度对象图像中,空间距离小的像素由小的灰度值表现。也就是说,与作为设想颜色的便的颜色更接近的颜色由小的灰度值表现,能够将灰度值小的区域视为便被摄像的区域。另一方面,在灰度对象图像中,空间距离大的像素由大的灰度值表现。也就是说,与作为设想颜色的便的颜色远离的颜色由大的灰度值表现,能够将灰度值大的区域视为便未被摄像的“非便”的区域。
213.利用该性质,分析部12b提取判定区域。具体而言,分析部12b将灰度对象图像中的像素的灰度值小于规定的第一阈值(以下也称为阈值1)的区域作为有排泄物的区域,提取该有排泄物的区域作为判定区域。第一阈值是相当于对便盆32中蓄积的清洗水s的颜色与水状便的颜色进行区分的边界的灰度值。
214.在将硬便与水状便的颜色进行比较的情况下,可以考虑,水状便由于在清洗水s中溶解,因此比硬便淡。在该情况下,与水状便的颜色对应的灰度值,由表示比与硬便对应的灰度值更从作为设想颜色的便的颜色远离的浓的灰色表现。
215.利用该性质,分析部12b从判定区域,对水状便的区域与硬便的区域进行区分并提取。具体而言,分析部12b在灰度对象图像中的判定区域之中,将灰度值小于规定的第二阈值(以下也称为阈值2)的区域作为硬便的区域,将灰度值为第二阈值以上的区域作为水溶便的区域。第二阈值被设定为比第一阈值小的值。水溶便的区域是“判定区域”的一例。硬便的区域是“判定区域”的一例。
216.分析部12b在判定区域中水状便的区域与硬便的区域混合存在的情况下,也可以对两个区域(即,水状便的区域与硬便的区域)进行区分并提取。在判定区域中两个区域混合存在的情况下,判定区域中包含的像素可取的灰度的范围,成为将水溶便可取的灰度的范围与硬便可取的灰度的范围合并的范围,因此成为较宽的范围。另一方面,在判定区域中仅存在一个区域(即,水状便的区域或者硬便的区域)的情况下,判定区域中包含的像素可取的灰度的范围成为较窄的范围。
217.利用该性质,分析部12b与判定区域中包含的像素中的灰度的范围相应地,判定在判定区域中水状便的区域与硬便的区域是否混合存在。分析部12b例如将判定区域中包含的像素中的灰度的最大值与最小值的差分设为灰度的范围。分析部12b在判定区域中的灰度的范围小于规定的差分阈值的情况下,判定为在判定区域中水状便的区域与硬便的区域不混合存在,也就是说,判定区域仅为水状便的区域或者硬便的区域。分析部12b在判定区域中的灰度的范围为规定的差分阈值以上的情况下,在判定区域中水状便的区域与硬便的区域混合存在。差分阈值与水溶便可取的灰度的范围和硬便可取的灰度的范围相应地,例如设定为与其中一个的宽的范围、其中一个的窄的范围或者两个范围中的代表值对应的值。代表值可以是两个范围中的简单相加平均值、加权平均值、中值等一般使用的代表值中的任一个。
218.分析部12b将表示提取的判定区域的图像(以下称为提取图像)的信息向判定部13b输出。在该情况下,分析部12b在判定区域中水状便的区域与硬便的区域混合存在的情况下,将在判定区域中表示水状便的区域的图像(以下称为水状部提取图像)、以及在判定区域中表示硬便的区域的图像(以下称为硬部提取图像)的信息,向判定部13b输出。另一方面,分析部12b在判定区域中水状便的区域与硬便的区域未混合存在的情况下,将表示水状便的区域作为判定区域的图像(即,水状便提取图像)、或者表示硬便的区域作为判定区域
的图像(即,硬便提取图像)的信息,向判定部13b输出。
219.返回图15,判定部13b基于由分析部12b取得的提取图像,进行与判定事项有关的判定。具体而言,判定部13b使用水状便提取图像,判定水状便的性状。判定部13b使用硬便提取图像,判定硬便的性状。判定部13b使用水状部提取图像,判定水状便的性状。判定部13b使用硬部提取图像,判定硬便的性状。
220.判定部13b也可以与上述的其他实施方式同样,使用基于机器学习的估计结果来判定便的性状。在该情况下,既可以由分析部12b通过机器学习进行估计,也可以由其他功能部进行估计。判定部13b也可以使用其他图像分析的方法来判定便的性状。在该情况下,判定装置10b能够省略学习完毕模型存储部16。
221.判定部13b能够将由分析部12b提取判定区域并限缩范围后的图像作为分析的对象,因此无需分析对象图像的整体。判定部13b能够将区分了是水状便还是硬便的图像作为分析的对象,因此与将未区分是水状便还是硬便的图像作为分析的对象的情况相比,判定性状的处理变得更容易。
222.针对第三实施方式的判定装置10b所进行的处理,使用图17进行说明。在本流程图中,表示了取得图像信息的处理被进行以后的处理的流程。取得图像信息的处理是与图4所示的流程图的步骤s11对应的处理,在本流程图中相当于记载为“相机图像”的处理。
223.在步骤s70中,分析部12b使对象图像灰度化,制成灰度对象图像。在步骤s71中,分析部12b判定灰度对象图像中的每个像素的灰度值是否小于第一阈值。在步骤s72中,分析部12b在灰度对象图像中,针对灰度值小于第一阈值的判定区域的像素群,计算灰度值的最大值与最小值的差分d。
224.在步骤s73中,分析部12b判定差分d是否小于规定的差分阈值a。分析部12b在差分d小于规定的差分阈值a的情况下,判定为在判定区域中水状便的区域与硬便的区域未混合存在,向步骤s74所示的处理前进。在步骤s74中,分析部12b判定判定区域中的每个像素的灰度值是否小于第二阈值。分析部12b在判定区域中的每个像素的灰度值小于第二阈值的情况下,在步骤s75中,将硬便提取图像向判定部13b输出。在步骤s82中,判定部13b基于硬便提取图像,判定仅为硬便的便(以下称为专为硬便的便)的性状。分析部12b在判定区域中的每个像素的灰度值为第二阈值以上的情况下,在步骤s76中,将水状便提取图像向判定部13b输出。在步骤s83中,判定部13b基于水状便提取图像,判定仅为水状便的便(以下称为专为水状便的便)的性状。
225.分析部12b在差分d为规定的差分阈值a以上的情况下(在图17中,步骤s73:否),在步骤s77中,判定为在判定区域中水状便的区域与硬便的区域混合存在。在步骤s78中,分析部12b判定判定区域中的每个像素的灰度值是否小于第二阈值。分析部12b在判定区域中的每个像素的灰度值小于第二阈值的情况下,在步骤s79中,将该区域作为硬部图像向判定部13b输出。在步骤s84中,判定部13b基于硬部提取图像,判定在混合存在的状态下的硬便的区域即硬部中的便的性状。分析部12b在判定区域中的每个像素的灰度值为第二阈值以上的情况下,在步骤s76中,将该区域作为水状部提取图像向判定部13b输出。在步骤s85中,判定部13b基于水状部提取图像,判定在混合存在的状态下的水状便的区域即水状部中的便的性状。
226.在步骤s86中,判定部13b使用步骤s82~s85对便的性状进行判定的结果,综合地
判定对象图像中的便的性状。
227.针对步骤s71中灰度对象图像中的每个像素的灰度值为第一阈值(阈值1)以上的像素群,在步骤s81中,判定为除了便以外的图像并从判定区域排除。
228.如以上所说明的那样,在第三实施方式的判定装置10b中,分析部12b基于设想颜色y中的颜色的特性,从对象图像提取判定区域。由此,在第三实施方式的判定装置10b中,能够从对象图像提取有排泄物的区域。能够对判定便的性状的区域进行限缩,因此与将对象图像的整体作为分析对象的情况相比,能够使判定所需的处理负荷减小。通过使处理负荷减小,即使不具有很高的运算能力的装置也能够进行处理,因此能够抑制装置成本增大。由于能够基于成为判定对象的排泄物的设想颜色y中的颜色的特性来提取判定区域,因此与和设想颜色y的颜色无关地提取的区域相比,判定区域中的判定变得更容易。
229.在第三实施方式的判定装置10b中,分析部12b针对对象图像中的每个像素的颜色,算出与设想颜色y在颜色空间上的空间距离z,并将算出的空间距离z小于规定的阈值的像素的集合作为判定区域提取。由此,在第三实施方式的判定装置10b中,能够根据空间距离z算出与设想颜色y之间的颜色的差异即色差,并判定与设想颜色y的色差小的区域,能够基于定量的指标来提取判定区域。
230.在第三实施方式的判定装置10b中,分析部12b针对对象图像中的每个像素的颜色,使用对与设想颜色y之间的每个颜色元素的差分进行加权而得到的值,算出颜色空间上的空间距离。由此,在第三实施方式的判定装置10b中,能够算出对易于表现与设想颜色y的差异的元素(例如,r元素)进行了强调的空间距离。由此,能够高精度地提取判定区域。
231.在第三实施方式的判定装置10b中,对象图像是rgb图像,设想颜色是由rgb值表示的颜色,分析部12b使用针对对象图像中的每个像素的表示r值、g值、b值的比率的颜色比率与设想颜色y中的颜色比率在r元素上的比率的差分、g元素上的比率的差分及b元素上的比率的差分进行了加权而得到的值,算出颜色空间上的空间距离。由此,在第三实施方式的判定装置10b中,能够不受被摄体被照射的光的光量的差异所引起的颜色的浓淡的差异影响而算出空间距离。由此,能够高精度地提取判定区域。
232.在第三实施方式的判定装置10b中,分析部12b制成灰度对象图像,将该灰度对象图像中的像素的灰度值小于规定的第一阈值的区域作为有排泄物的区域,提取该有排泄物的区域作为判定区域。由此,在第三实施方式的判定装置10b中,能够通过将灰度对象图像中的每个像素的灰度值与阈值比较这样的容易的方法来提取判定区域。
233.在第三实施方式的判定装置10b中,分析部12b将灰度对象图像中的像素的灰度值小于所述第一阈值且为比所述第一阈值小的规定的第二阈值以上的区域,作为水状便被示出的区域,将所述灰度对象图像中的像素的灰度值小于所述第二阈值的区域,作为硬便被示出的区域,提取该水状便被示出的区域以及该硬便被示出的区域作为所述判定区域。由此,在第三实施方式的判定装置10b中,能够通过将灰度对象图像中的每个像素的灰度值与阈值比较这样的容易的方法,对水状便被示出的区域与硬便被示出的区域进行区分并提取判定区域,能够精度更高地提取判定区域。通过对水状便被示出的区域与硬便被示出的区域进行区分并提取判定区域,与不进行区分的情况相比,能够使判定部13b进行判定的处理负荷减小。
234.上述例示了分析部12b使用一个灰度对象图像提取判定区域的情况进行说明。但
是,不限定于此。分析部12b也可以使用多个不同的灰度对象图像提取判定区域。例如,分析部12b也可以使用将颜色比率的加权的欧几里得距离z4变换为灰度而得到的灰度对象图像,仅进行基于第一阈值提取判定区域的处理。分析部12b也可以使用将欧几里得距离z1变换为灰度而得到的灰度对象图像,仅进行基于第二阈值对水状便与硬便的区域进行区分并提取的处理。
235.上述针对多个实施方式进行了说明。但是,各实施方式中的结构不仅限定于该实施方式的结构,也可以用作其他实施方式的结构。例如,对第一实施方式中判定便的性状的处理,也可以使用第二实施方式及其变形例所涉及的差分图像、分割图像、或者整体图像和部分图像。对第二实施方式及其变形例所涉及的差分图像等,也可以使用第三实施方式中的灰度对象图像。对第三实施方式的判定便的性状的处理,也可以使用第二实施方式及其变形例所涉及的差分图像、分割图像、或者整体图像和部分图像。
236.(第四实施方式)
237.判定装置10c判定在对象图像中是否摄像了起因于摄像装置或者摄像环境的污迹。起因于摄像装置或者摄像环境的污迹,是指在对象图像中被摄像的与摄像对象物不同的阴影或斑点。例如,起因于摄像装置或者摄像环境的污迹是伴随着排泄物被排泄或者排泄物下落至便盆32而飞散并附着于镜头等的污物、尿或者污水等。或者,起因于摄像装置或者摄像环境的污迹,是在通过进行便器清洗而冲下排泄物时附着于镜头等的水滴。或者,起因于摄像装置或者摄像环境的污迹,是在通过进行局部清洗而进行清洗时,从喷嘴喷出的清洗水附着于镜头等而产生的水滴。附着于镜头等的指纹等也是起因于摄像装置或者摄像环境的污迹的一例。
238.在以下,例示判定摄像装置中的镜头是否有污迹(以下也称为镜头污迹)的情况进行说明。但是不限定于此。例如,在摄像装置的镜头的外侧安装有防水板的状态下进行摄像的情况下,判定该防水板是否有污迹。镜头污迹是“起因于摄像装置或者摄像环境的污迹”的一例。在摄像装置的镜头的外侧安装有防水板的情况下的该防水板的污迹是“起因于摄像装置或者摄像环境的污迹”的一例。
239.判定装置10c具备学习完毕模型存储部16d。如图18所示,学习完毕模型存储部16c具备镜头污迹估计模型167。镜头污迹估计模型167是学习了图像与摄像了图像的摄像装置中的镜头污迹的有无之间的对应关系而得到的学习完毕模型,通过学习将对象图像与表示根据该图像判断的镜头污迹的有无的信息相对应的学习数据而被制成。镜头污迹例如是表示是否有污迹的二值的信息、或者与镜头污迹的程度相应的多个级(level)的信息。作为判断镜头污迹的有无的方法,例如可以考虑由制成学习数据的负责人判断图像中的镜头污迹的有无。
240.分析部12使用镜头污迹估计模型167,估计在摄像了图像的摄像装置中有无镜头污迹。分析部12将通过向镜头污迹估计模型167输入对象图像而得到的输出,设为估计对象图像中的镜头污迹的有无的估计结果。
241.判定部13使用从分析部12得到的分析结果,判定对象图像中的镜头污迹的有无。例如,判定部13在由分析部12估计为对象图像有镜头污迹的情况下,判定为对象图像中有镜头污迹。判定部13在由分析部12估计为在对象图像中无镜头污迹的情况下,判定为在对象图像中无镜头污迹。
242.判定部13在由分析部12估计为对象图像有镜头污迹的情况下,也可以经由输出部14输出表示有镜头污迹的意思。
243.判定部13在由分析部12估计为在对象图像中无镜头污迹的情况下,也可以判定尿的有无、便的有无、便的性状以及纸的使用量或清洗方法等(以下称为尿的有无等)。由此,能够使用根据无镜头污迹的图像估计的尿的有无等的估计结果来进行判定。从而,与使用根据有镜头污迹的图像估计的结果的情况相比,能够使用精度更高的估计结果。
244.使用图19,说明判定装置10c所进行的处理的流程。在步骤s100中,判定装置10c通过与便器装置3的通信,判定便器装置3的使用者是否已就座于便器30。判定装置10c在判定为使用者已就座于便器30的情况下,在步骤s101中取得图像信息。
245.接着,在步骤s102中,判定装置10c判定是否有镜头污迹。判定装置10c基于通过向镜头污迹估计模型167输入图像而得到的输出,判定镜头污迹的有无。判定装置10c在无镜头污迹的情况下,在步骤s103中进行判定处理。判定处理与图4的步骤s12所示的处理同样,因此省略其说明。判定装置10c在有镜头污迹的情况下,在步骤s104中,输出表示有镜头污迹的意思。
246.在上述中,例示了在步骤s103中仅在无镜头污迹的情况下进行判定处理的情况进行说明。但是,本公开不限定于此。判定装置10c也可以在有镜头污迹的情况下也考虑该污迹来进行判定处理。在该情况下,判定装置10c将用于进行判定的学习完毕模型,设为与有镜头污迹的情况对应的模型。具体而言,判定装置10c使用如下学习完毕模型进行判定处理,该学习完毕模型是通过使用神经网络的机器学习,学习了包含起因于摄像装置或者摄像环境的污迹而摄像的学习用图像和与排泄有关的判定事项的判定结果之间的对应关系而得到的模型。
247.例如,尿有无估计模型161是学习了镜头污迹被摄像的图像与尿的有无之间的对应关系而得到的学习完毕模型。也就是说,尿有无估计模型161是通过学习将镜头污迹与排泄后的便盆32的情形一起被摄像的图像与表示根据该图像判断的尿的有无的信息相对应的学习数据而制成的模型。例如,便有无估计模型162是学习了镜头污迹被摄像的图像与便的有无之间的对应关系而得到的学习完毕模型。也就是说,便有无估计模型162是通过学习将镜头污迹与排泄后的便盆32的情形一起被摄像的图像与表示根据该图像判断的便的有无的信息相对应的学习数据而制成的模型。针对便性状估计模型163、纸使用有无估计模型165以及使用纸张量估计模型166也同样。
248.在上述的步骤s104中,在有镜头污迹的情况下输出表示有镜头污迹的意思,作为输出目的地可以向任意的功能部输出。
249.例如,判定装置10也可以向进行局部清洗等的情况下被操作的遥控器装置,输出表示有镜头污迹的信息。在该情况下,例如,遥控器装置使遥控器装置所具备的各种标记之中的镜头污迹标记点亮。遥控器装置所具备的各种标记是用于通知对与便器装置3有关的状态进行传感而得到的结果的标记,例如是用于通知便座的温度设定、局部清洗的清洗强度、遥控器装置的电源是否接通、遥控器装置的电池耗尽、镜头污迹的有无等的标记。
250.判定装置10也可以利用声音或显示等向用户通知表示有镜头污迹的意思。在该情况下,判定装置10c或者遥控器装置具备用于输出声音的扬声器或显示图像的显示器。由此,能够使用户认知有镜头污迹的意思,促使其进行摄像装置4以及周围的保洁,维持无镜
头污迹的干净的状态。
251.在便器装置3具有对便器装置3中设置的摄像装置4以及周围进行保洁的保洁功能的情况下,也可以向控制该保洁功能的控制部通知表示有镜头污迹的意思。控制镜头保洁功能的控制部既可以设置于便器30,也可以设置于与便器30分体的针对便器30的遥控器装置(未图示)等。该控制部如果从判定装置10c接收到表示有镜头污迹的意思的通知,则使镜头保洁功能运转来对镜头进行保洁。由此,能够去除镜头污迹,摄像无镜头污迹的图像。
252.如以上所说明的那样,在第四实施方式的判定装置10c中,判定事项包含摄像了对象图像的摄像装置中的镜头污迹的有无。由此,在第四实施方式的判定装置10c中,能够判定镜头污迹的有无。从而,能够进行与镜头污迹的有无相应的应对。
253.在第四实施方式的判定装置10c中,判定事项包含尿的有无、便的有无、便的性状之中的至少其中一个。判定部13在由分析部12估计为有镜头污迹的情况下,尿的有无、便的有无、便的性状中的任一个判定均不进行。由此,在第四实施方式的判定装置10c中,能够设为在有镜头污迹的情况下不进行便的性状等的判定。从而,与在有镜头污迹的情况下也进行判定的情况相比,能够以更高精度进行判定。
254.对镜头污迹的有无进行判定的定时,不限定于对判定事项进行判定的定时。即使在未检测出向便器装置3的便座就座的情况下,也可以在任意的定时,对便盆32的内部空间34进行摄像,并基于摄像的图像判定镜头污迹的有无。例如,可以设为一日一次等,定期地判定镜头污迹的有无。
255.在第四实施方式的判定装置10c中,判定事项包含尿的有无、便的有无、便的性状之中的至少其中一个。判定部13也可以在由分析部12估计为有镜头污迹的情况下,使用考虑了镜头污迹的模型,进行尿的有无、便的有无、便的性状的其中一个的判定。考虑了镜头污迹的模型,是通过使用神经网络的机器学习,学习了包含起因于摄像装置或者摄像环境的污迹而摄像的学习用图像和与排泄有关的判定事项的判定结果之间的对应关系而得到的学习完毕模型。由此,在第四实施方式的判定装置10c中,即使在有镜头污迹的情况下,也能够在考虑了镜头的污迹被摄像的基础上进行便的性状等的判定。从而,在有镜头污迹的情况下,与不考虑有镜头的污迹而进行判定的情况相比,能够以更高精度进行判定。
256.在第四实施方式的判定装置10c中,判定部13也可以在由分析部12估计为有镜头污迹的情况下,将表示有镜头污迹的意思经由输出部14输出。由此,例如能够将表示有镜头污迹的意思向遥控器装置输出,使遥控器装置的镜头污迹标记点亮。或者,能够利用声音输出表示有镜头污迹的意思,或者使表示有镜头污迹的意思显示在图像上。由此,能够使用户认知有镜头污迹的意思,能够促使用户进行保洁,维持无镜头污迹的干净的状态。或者,能够向控制便器装置3的镜头保洁功能的控制部输出,使镜头保洁功能工作,维持无镜头污迹的干净的状态。
257.上述例示了将表示有镜头污迹的意思输出到的输出目的地的装置是遥控器装置的情况进行说明。但是,本公开不限定于此。输出目的地可以包含能够应对镜头污迹的任意的装置。例如,输出目的地既可以是使用厕所的用户的用户终端,也可以是对厕所进行保洁的保洁业者的保洁业者终端,还可以是对厕所被设置于的设施进行管理的设施管理者终端。
258.上述说明了输出表示有镜头污迹的意思作为判定装置10c所通知的通知内容的例
子。但是,本公开不限定于此。判定装置10c可以基于判定部13的判定结果,通知与输出目的地相应的任意的内容。
259.例如,判定装置10c也可以告知厕所有污迹、污迹的程度、厕所保洁的必要性。判定装置10c也可以在通知了表示有镜头污迹的意思的情况下,依次通知其后的经过情况。例如,判定装置10c在向多个通知目的地通知表示有镜头污迹的意思,并从某通知目的地回答了已对厕所进行保洁的意思的情况下,也可以向上次通知的多个通知目的地通知表示保洁已完成的意思。
260.上述的实施方式中的判定装置10、10a、10b、10c所进行的处理的全部或者一部分也可以由计算机实现。在该情况下,也可以将用于实现该功能的程序记录于计算机可读取的记录介质,并使计算机系统读入该记录介质中记录的程序并进行执行从而实现。“计算机系统”包含os或周边机器等硬件。“计算机可读取的记录介质”是指软磁盘、光磁盘、rom、cd-rom等可移动介质、计算机系统中内置的硬盘等存储装置。进而,“计算机可读取的记录介质”也可以包含:如经由互联网等网络或电话线路等通信线路发送程序的情况下的通信线那样,在短时间中动态地保持程序的介质;如该情况下的作为服务器或客户端的计算机系统内部的易失性存储器那样,以一定时间保持程序的介质。上述程序既可以是用于实现所述的功能的一部分的程序,进而也可以是能够通过与计算机系统中已经记录的程序的组合来实现所述的功能的程序,还可以是使用fpga等可编程逻辑设备实现的程序。
261.具体的结构不限于该实施方式。
262.标号说明
[0263]1……
判定系统,10
……
判定装置,11
……
图像信息取得部,12
……
分析部(估计部、提取部),13
……
判定部,14
……
输出部,15
……
图像信息存储部,16
……
学习完毕模型存储部,17
……
判定结果存储部,18
……
通信部,20
……
学习装置,21
……
通信部,22
……
学习部,3
……
便器装置,30
……
便器,32
……
便盆,34
……
内部空间,36
……
开口部,s
……
清洗水,4
……
摄像装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。