技术特征:
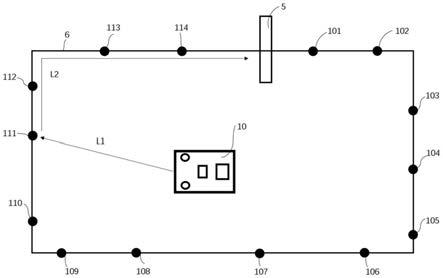
1.一种自移动设备,用于在工作区域内自主行走和执行作业任务,其特征在于,所述自移动设备包括:地图存储模块,用于预先存储所述工作区域的地图以及沿所述工作区域边界间隔布置的多个可识别的边界标签的位置坐标;边界标签检测单元,用于识别所述边界标签;定位单元,用于获取所述自移动设备当前位置坐标;回归路径规划单元,用于接收回归指令并计算设置在边界处的多个可识别的边界标签的位置坐标与当前所述自移动设备的位置坐标之间的第一回归路径的长度l1,以及相应边界标签与回充位置之间的第二回归路径长度l2,从中选择(l1 l2)的值最小的路径作为最优回归路径;控制单元,用于控制自移动设备按照所述最优回归路径回归至所述回充位置。2.根据权利要求1所述的自移动设备,其特征在于,所述回充位置位于所述边界上,所述第二回归路径包括相应的所述边界标签与所述回充位置之间的所述边界的路径轨迹。3.根据权利要求1所述的自移动设备,其特征在于,所述自移动设备回归过程中,将所述定位单元测量的当前位置坐标校正为当前检测到的所述边界标签的位置坐标,所述第二回归路径包括校正后的所述位置坐标至所述回充位置的位置坐标之间的最短路径。4.根据权利要求1至3任意一项所述的自移动设备,其特征在于,所述第一回归路径包括回归前所述自移动设备的位置坐标与相应的所述边界标签之间的直线路径。5.根据权利要求1所述的自移动设备,其特征在于,所述工作区域的外边界由边界线围成,所述回充位置为设置在所述边界线上的充电站所在的位置。6.根据权利要求5所述的自移动设备,其特征在于,所述边界标签固定设置于所述边界线上或沿所述边界线设置,所述定位单元预先存储有相邻的所述边界标签之间的边界线长度信息,和/或每个所述边界标签与所述充电站之间的边界线的长度信息。7.根据权利要求1所述的自移动设备,其特征在于,所述定位单元用于根据检测到的所述边界标签的位置坐标与当前所述定位单元测量的位置坐标的偏差,校正至少部分所述位置坐标序列。8.根据权利要求1所述的自移动设备,其特征在于,所述自移动设备为自动割草机。9.一种自移动设备快速回归充电站的方法,所述自移动设备用于在工作区域内自主行走和执行作业任务,其特征在于,所述方法包括:检测自移动设备是否需要回归至充电站;当自移动设备需要回归至充电站时,计算沿边界布置的多个可识别的边界标签的位置坐标与当前所述自移动设备的位置坐标之间的第一回归路径的长度l1,以及相应所述边界标签与所述充电站之间的第二回归路径长度l2;控制自移动设备按照(l1 l2)的值最小的回归路径作为回充最优路径返回至所述充电站。10.根据权利要求9所述的方法,其特征在于,所述充电站布置于所述工作区域的边界上,还包括:计算所述充电站位置与任一边界标签在边界上的距离l1,以及当前自移动设备与所述任一边界标签之间的距离l2,得到n组(l1 l2),n为边界标签的数量;
从n组(l1 l2)中选择(l1 l2)的值最小值的一组作为所述回充最优路径。11.根据权利要求9所述的快速回归充电站的方法,其特征在于,还包括,当所述自移动设备回归至相应所述边界标签处,以检测到的所述边界标签的位置坐标校正为当前定位单元测量的位置坐标。
技术总结
本申请公开了一种自移动设备,包括:地图存储模块,用于预先存储工作区域的地图以及沿工作区域边界间隔布置的多个可识别的边界标签的位置坐标;边界标签检测单元;定位单元;回归路径规划单元,用于接收回归指令并计算设置在边界处的多个可识别的边界标签的位置坐标与当前自移动设备的位置坐标之间的第一回归路径的长度L1,以及相应边界标签与回充位置之间的第二回归路径长度L2,从中选择(L1 L2)的值最小的路径作为最优回归路径。本申请还提供了一种回归充电站的方法。本申请提供的自移动设备及回归充电站的方法,能够计算选择最优回充路径,降低回归过程的能量消耗。降低回归过程的能量消耗。降低回归过程的能量消耗。
技术研发人员:杨勇 施敏杰 王琳 孟帅
受保护的技术使用者:深圳市杉川机器人有限公司
技术研发日:2020.08.26
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。