热机械致动器
1.相关申请的交叉引用
2.本技术要求于2019年7月29日提交的ep申请19188866.8的优先权,该申请的全部内容通过引用并入本文。
技术领域
3.本发明涉及热机械致动器以及包括用于光刻设备的部件和热机械致动器的组件。
背景技术:
4.光刻设备是被构造为将期望图案施加到衬底上的机器。光刻设备可以被用于例如集成电路(ic)的制造中。光刻设备例如可以将图案形成装置(例如,掩模)的图案(也经常被称为“设计布局”或“设计”)投影到衬底(例如,晶片)上提供的辐射敏感材料(光致抗蚀剂)层上。
5.随着半导体制造工艺的不断进步,电路元件的尺寸不断减小,而每个器件的功能元件(诸如晶体管)的数量在过去几十年中一直在稳步增加,遵循通常被称为“摩尔定律”的趋势。为了跟上摩尔定律,半导体行业正在追逐能够创造出越来越小的特征的技术。为了在衬底上投影图案,光刻设备可以使用电磁辐射。该辐射的波长决定了在衬底上图案化的特征的最小尺寸。当前使用的典型波长为365nm(i-line)、248nm、193nm和13.5nm。使用具有在4nm到20nm范围内,例如6.7nm或13.5nm的波长的极紫外(euv)辐射的光刻设备可以被用于在衬底上形成比使用例如波长为193nm的辐射的光刻设备更小的特征。
6.为了跟上不断增长的缩小电路元件尺寸的需求,可以需要或期望更精确地控制图案化过程。具体地,可以需要在图案化过程期间更好地控制衬底的位置或者在图案化过程期间更好地控制衬底的温度。类似地,可以需要更好地控制用于生成投影到衬底上的经图案化的辐射束的光学元件的形状或位置或温度。
技术实现要素:
7.本发明的一个目的是实现对部件(诸如光刻设备的部件或在光刻设备中使用的部件)的改进控制,特别是改进的热和机械控制。
8.根据本发明的一个方面,提供了包括压电模块的热机械致动器,压电模块包括至少一个压电元件,其中热机械致动器被配置为:
9.接收用于控制压电模块的热行为的热致动信号,或者
10.提供表示压电模块的热状态的热感测信号,并且,
11.其中热机械致动器被配置为:
12.接收用于控制压电模块的机械行为的机械致动信号,或者
13.提供表示压电模块的机械状态的机械感测信号。
14.根据本发明的另一方面,提供了组件,包括:
15.用于光刻设备的部件,以及
16.根据本发明的热机械致动器,
17.其中热机致动器被配置为控制部件的热行为和机械行为。
附图说明
18.现在将仅通过示例的方式、参考所附示意图来描述本发明的实施例,其中:
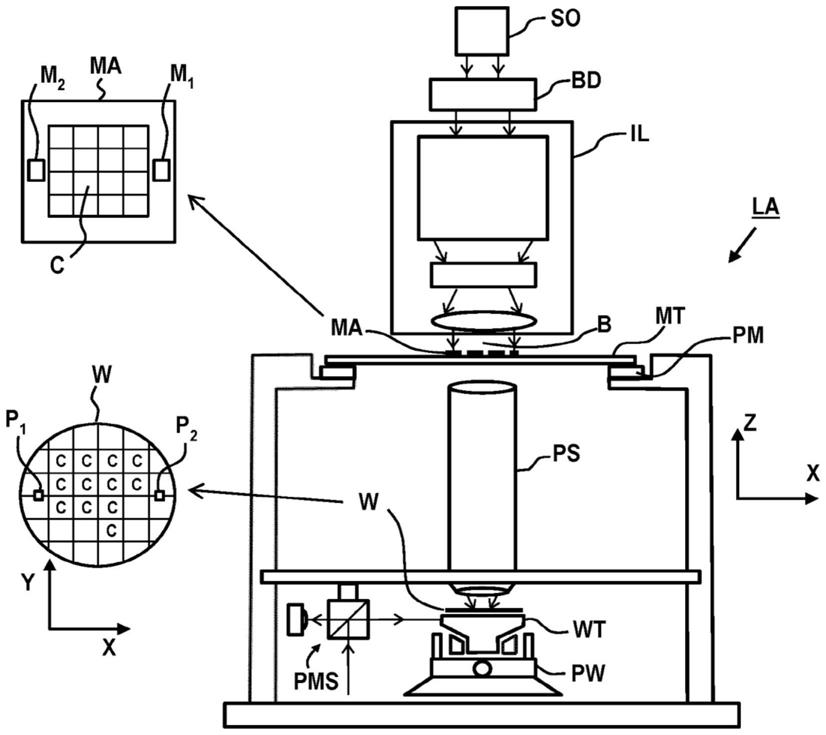
19.图1描绘了光刻设备的示意图;
20.图2描绘了图1的光刻设备的一部分的具体视图;
21.图3示意性地描绘了位置控制系统;
22.图4-图7描绘了根据本发明的热机械致动器的各种实施例;
23.图8-图10描绘了可以应用于根据本发明的热机械致动器中的压电元件的各种实施例;
24.图11-图12描绘了根据本发明的组件的实施例;
25.图13描绘了根据本发明的致动器的操作循环;
26.图14描绘了根据本发明的致动器在曝光序列期间的操作。
具体实施方式
27.在本文件中,术语“辐射”和“光束”用于涵盖所有类型的电磁辐射,包括紫外辐射(例如,波长为365nm、248nm、193nm、157nm或126nm)和euv(极紫外-紫色辐射,例如,具有约5nm-100nm范围内的波长)。本文中所使用的术语“掩模板”、“掩模”或“图案形成装置”可以被广义地解释为指代可以被用于为入射辐射束赋予经图案化的截面的通用图案形成装置,经图案化的截面对应于待在衬底的目标部分中创建的图案。在该上下文中也可以使用术语“光阀”。除了经典掩模(透射或反射、二元、相移、混合等)之外,其他此类图案形成装置的示例包括可编程反射镜阵列和可编程lcd阵列。
28.图1示意性地描绘了光刻设备la。光刻设备la包括:照射系统(也被称为照射器)il,其被配置为调节辐射束b(例如,uv辐射、duv辐射或euv辐射);掩模支撑件(例如,掩模台)mt,其被构造为支撑图案形成装置(例如,掩模)ma并且被连接到第一定位器pm,第一定位器pm被配置为根据某些参数来准确地定位图案形成装置ma;衬底支撑件(例如,晶片台)wt,被构造为保持衬底(例如,涂覆有抗蚀剂的晶片)w并且被连接到第二定位器pw,第二定位器pw被配置为根据某些参数来准确定位衬底支撑件;以及投影系统(例如,折射投影透镜系统)ps,其被配置为通过图案形成装置ma将赋予辐射束b的图案投影到衬底w的目标部分c(例如,包括一个或多个管芯)上。
29.在操作中,照射系统il经由光束传输系统bd,从辐射源so接收辐射束。照射系统il可以包括各种类型的光学部件,诸如折射型、反射型、磁性型、电磁型、静电型和/或其他类型的光学部件或者其任何组合,以用于对辐射进行引导、成形和/或控制。照射器il可以被用于将辐射束b调节为在其在图案形成装置ma的平面处的截面中具有期望的空间和角强度分布。
30.根据所使用的曝光辐射和/或其他因素(诸如使用浸没液体或使用真空),本文所使用的术语“投影系统”ps应被广义地解释为涵盖各种类型的投影系统,包括折射型、反射型、反射折射型、畸变型、磁性型、电磁型和/或静电型光学系统或它们的任何组合。本文中
对术语“投影透镜”的任何使用可以被认为与更通用的术语“投影系统”ps同义。
31.光刻设备la可以是这样的类型,其中衬底的至少一部分可以由具有相对高折射率的液体(例如,水)覆盖,从而填充投影系统ps和衬底w之间的空间,这也被称为浸没式光刻。us6952253中给出了关于浸没技术的更多信息,该文献通过引用并入本文。
32.光刻设备la还可以是具有两个或更多个衬底支撑件wt的类型(也被称为“双级”)。在这样的“多级”机器中,衬底支撑件wt可以被并行使用,和/或衬底w的后续曝光准备步骤可以在衬底w上执行,衬底w位于衬底支撑件wt上,同时另一衬底支撑件wt上的另一衬底w被用于曝光另一衬底w上的图案。
33.除了衬底支撑件wt之外,光刻设备la可以包括测量级。测量级被布置为保持传感器和/或清洁装置。传感器可以被布置为测量投影系统ps的性质或者辐射束b的性质。测量级可以保持多个传感器。清洁装置可以被布置为清洁光刻设备的一部分,例如投影系统ps的一部分或提供浸没液体的系统的一部分。当衬底支撑件wt远离投影系统ps时,测量级可以在投影系统ps下方移动。
34.在操作中,辐射束b入射在图案形成装置(例如,掩模ma)上并且由图案形成装置ma上存在的图案(设计布局)图案化,图案形成装置被保持在掩模支撑件mt上。在穿过图案形成装置ma之后,辐射束b穿过投影系统ps,投影系统ps将光束聚焦到衬底w的目标部分c上。在第二定位器pw和位置测量系统if的帮助下,衬底支撑件wt可以被准确地移动,例如以将不同的目标部分c定位在辐射束b的路径中的聚焦和对准位置处。类似地,第一定位器pm和可能的另一位置传感器(图1中未明确描绘)可以被用于将图案形成装置ma相对于辐射束b的路径准确地定位。图案形成装置ma和衬底w可以使用掩模对准标记m1、m2和衬底对准标记p1、p2来对准。尽管如图所示的衬底对准标记p1、p2占据专用目标部分,但是它们可以位于目标部分之间的空间中。当衬底对准标记p1、p2位于目标部分c之间时,它们被称为划线对准标记。
35.为了阐明本发明,使用笛卡尔坐标系。笛卡尔坐标系具有三个轴,即x轴、y轴和z轴。三个轴中的每一个与另外两个轴正交。围绕x轴的旋转被称为rx旋转。围绕y轴的旋转被称为ry旋转。围绕z轴的旋转被称为rz旋转。x轴和y轴限定水平面,而z轴在竖直方向。笛卡尔坐标系不限制本发明并且仅用于说明。相反,可以使用另一坐标系(诸如柱坐标系)来阐明本发明。笛卡尔坐标系的取向可以不同,例如使得z轴具有沿水平面的分量。
36.图2示出了图1的光刻设备la的一部分的更具体视图。光刻设备la可以被提供有基架bf、平衡质量块bm、量测框架mf和振动隔离系统is。量测框架mf支撑投影系统ps。附加地,量测框架mf可以支撑位置测量系统pms的一部分。量测框架mf经由振动隔离系统is由基架bf支撑。振动隔离系统is被布置为防止或减少振动从基架bf传播到量测框架mf。
37.第二定位器pw被布置为通过在衬底支撑件wt和平衡质量块bm之间提供驱动力来加速衬底支撑件wt。驱动力沿期望方向加速衬底支撑件wt。由于动量守恒,驱动力也以相等的幅度被施加到平衡质量块bm上,但方向与所需方向相对。通常,平衡质量块bm的质量显著大于第二定位器pw的移动部分和衬底支撑件wt的质量。
38.在一个实施例中,第二定位器pw由平衡质量块bm支撑。例如,其中第二定位器pw包括平面马达,用于将衬底支撑件wt悬浮在平衡质量块bm之上。在另一实施例中,第二定位器pw由基架bf支撑。例如,其中第二定位器pw包括线性马达并且其中第二定位器pw包括轴承
(例如气体轴承),用于将衬底支撑件wt悬浮在基架bf之上。
39.位置测量系统pms可以包括适于确定衬底支撑件wt的位置的任何类型的传感器。位置测量系统pms可以包括适于确定掩模支撑件mt的位置的任何类型的传感器。传感器可以是光学传感器,诸如干涉仪或编码器。位置测量系统pms可以包括干涉仪和编码器的组合系统。传感器可以是另一类型的传感器,诸如磁传感器、电容传感器或电感传感器。位置测量系统pms可以确定相对于基准(例如量测框架mf或投影系统ps)的位置。位置测量系统pms可以通过测量位置或者通过测量位置的时间导数(诸如速度或加速度)来确定衬底台wt和/或掩模支撑件mt的位置。
40.位置测量系统pms可以包括编码器系统。编码器系统从例如于2006年9月7日提交的美国专利申请us2007/0058173a1中获知,该专利通过引用并入本文。编码器系统包括编码器头、光栅和传感器。编码器系统可以接收初级辐射束和次级辐射束。初级辐射束和次级辐射束二者均源自相同的辐射束,即原始辐射束。初级辐射束和次级辐射束中的至少一个辐射束通过利用光栅衍射原始辐射束而创建。如果初级辐射束和次级辐射束二者均通过利用光栅衍射原始辐射束而创建,则初级辐射束需要具有与次级辐射束不同的衍射级。不同的衍射级例如是 1级、-1级、 2级和-2级。编码器系统将初级辐射束和次级辐射束可选地光学组合为组合辐射束。编码器头中的传感器确定组合辐射束的相位或相位差。传感器基于相位或相位差而生成信号。信号表示编码器头相对于光栅的位置。编码器头和光栅中的一者可以被布置在衬底结构wt上。编码器头和光栅中的另一者可以被布置在量测框架mf或基架bf上。例如,多个编码器头被布置在量测框架mf上,而光栅被布置在衬底支撑件wt的顶表面上。在另一示例中,光栅被布置在衬底支撑件wt的底表面上,并且编码器头被布置在衬底支撑件wt之下。
41.位置测量系统pms可以包括干涉仪系统。干涉仪系统从例如于1998年7月13日提交的美国专利us6,020,964中获知,该专利通过引用并入本文。干涉仪系统可以包括分束器、反射镜、基准镜和传感器。辐射束由分束器划分为基准束和测量束。测量束传播到反射镜并且由反射镜反射回分束器。基准束传播到基准镜并且由基准镜反射回分束器。在分束器处,测量束和基准束被组合为组合辐射束。组合辐射束入射在传感器上。传感器确定组合辐射束的相位或频率。传感器基于相位或频率而生成信号。信号表示反射镜的位移。在一个实施例中,反射镜被连接到衬底支撑件wt。基准镜可以被连接到量测框架mf。在一个实施例中,测量束和基准束通过附加的光学部件而不是分束器而被组合为组合辐射束。
42.第一定位器pm可以包括长行程模块和短行程模块。短行程模块被布置为相对于长行程模块在小移动范围内以高精度移动掩模支撑件mt。长行程模块被布置为相对于投影系统ps在大移动范围内以相对低的精度移动短行程模块。利用长行程模块和短行程模块的组合,第一定位器pm能够在大移动范围内以高精度相对于投影系统ps移动掩模支撑件mt。类似地,第二定位器pw可以包括长行程模块和短行程模块。短行程模块被布置为相对于长行程模块在小移动范围内以高精度移动衬底支撑件wt。长行程模块被布置为相对于投影系统ps在大移动范围内以相对低的精度移动短行程模块。利用长行程模块和短行程模块的组合,第二定位器pw能够在大移动范围内以高精度相对于投影系统ps移动衬底支撑件wt。
43.第一定位器pm和第二定位器pw各自被提供有致动器,用于分别移动掩模支撑件mt和衬底支撑件wt。致动器可以是线性致动器,用于提供沿单个轴(例如y轴)的驱动力。多个
线性致动器可以被用来提供沿多个轴的驱动力。致动器可以是平面致动器,用于提供沿多个轴的驱动力。例如,平面致动器可以被布置为以6个自由度移动衬底支撑件wt。致动器可以是包括至少一个线圈和至少一个磁体的电磁致动器。致动器被布置为通过向至少一个线圈施加电流来相对于至少一个磁体移动至少一个线圈。致动器可以是动磁式致动器,其具有分别耦合到衬底支撑件wt和掩模支撑件mt的至少一个磁体。致动器可以是动圈式致动器,其具有分别耦合到衬底支撑件wt和掩模支撑件mt的至少一个线圈。致动器可以是音圈致动器、磁阻致动器、洛伦兹致动器或压电致动器或任何其他合适的致动器。
44.光刻设备la包括如图3示意性描绘的位置控制系统pcs。位置控制系统pcs包括设定点发生器sp、前馈控制器ff和反馈控制器fb。位置控制系统pcs向致动器act提供致动信号致动信号。致动器act可以是第一定位器pm或第二定位器pw的致动器。致动器act驱动成套机械设备p,成套机械设备p可以包括衬底支撑件wt或掩模支撑件mt。成套机械设备p的输出是位置量,诸如位置或速度或加速度。位置量由位置测量系统pms测量。位置测量系统pms生成信号,信号是表示成套机械设备p的位置量的位置信号。设定点发生器sp生成信号,信号是表示成套机械设备p的期望位置量的基准信号。例如,基准信号表示衬底支撑件wt的期望轨迹。基准信号和位置信号之间的差形成反馈控制器fb的输入。基于输入,反馈控制器fb为致动器act提供致动信号致动信号的至少一部分。基准信号可以形成前馈控制器ff的输入。基于输入,前馈控制器ff为致动器act提供致动信号致动信号的至少一部分。前馈ff可以利用与成套机械设备p的动态特性有关的信息,诸如质量、刚度、共振模式和本征频率。
45.为了准确地执行图案化过程或曝光过程,需要经图案化的辐射束相对于衬底准确地定位,所述衬底例如包括先前图案化的层。为了确保半导体器件或电路的正确操作,需要经图案化的辐射束和先前图案化的层的精确对准。这样的精确对准可以例如需要将衬底精确定位在与衬底主表面基本平行的xy平面中。在本发明的含义内,x轴和y轴被定义为基本上平行于衬底表面的两个基本上垂直的轴。通常x轴和y轴限定基本水平的xy平面。还可以指出,经图案化的辐射束(具体是经图案化的辐射束的焦平面)与衬底表面之间的z方向对准也需要准确,以保持衬底焦点。
46.此外,可以指出,为了实现经图案化的辐射束的图案与衬底之间的精确对准,需要精确控制衬底的温度,特别是经图案化的面积中的温度。还可以指出,类似的考虑适用于光刻设备参与经图案化的辐射束的生成的部件。具体地,为了生成期望的经图案化的辐射束,还需要对照射系统和投影系统的部件的位置、形状和温度进行精确控制。
47.为了相对于经图案化的辐射束定位衬底,可以应用如上所述的定位装置。还已知将冷却装置应用以例如冷却衬底或光学部件,诸如反射镜。然而,这样的装置可能相当庞大并且不能在局部水平上控制位置或温度,而是在全局水平上操作,即,作用于整个衬底或反射镜,而不是作用于细节的部分或部块。这样的装置可能例如用不足的空间分辨率作用于衬底或光学组件的各部分。
48.本发明提供了热机械致动器,其能够以更具体的方式控制物体的形状、位置或温度。
49.图4示意性地示出了根据本发明的热机械致动器100的实施例。如图所示的热机械致动器100包括压电模块110,压电模块110包括至少一个压电元件120。
50.在本发明的含义内,压电元件指代包括压电材料(诸如pzt等)或由压电材料制成
的部件。在本发明的含义内,压电材料是在经受电场时发生变形并且在经受机械应变或压力时生成电场的材料。在本发明中进一步假设所应用的压电材料也将具有热电特性和电热特性。这样的特性指代这样的材料在经受电场时会发生温度变化并且在经受热通量时会生成电场的性质。
51.根据本发明,热机械致动器还被配置为接收或提供第一信号132以及接收或提供第二信号134。在本发明的实施例中,第一信号132和第二信号134可以由致动器100的压电模块110接收或提供。具体地,第一信号132和第二信号134可以由如由图4中的虚线表示的致动器100的至少一个压电元件120接收或提供。
52.根据本发明,第一信号132可以与根据本发明的热机械致动器100的压电元件120中应用的压电材料的热性质或特性相关联。具体地,第一信号132可以是用于控制压电模块的热行为的热致动信号,或者是表示压电模块的热状态的热感测信号。在后一情况下,压电模块(例如压电模块的压电元件)被用作传感器,即温度传感器。在这种情况下,依赖于压电模块的热电特性。在前一情况下,压电模块(例如压电模块的压电元件)被用作热致动器。在本发明的含义内,热致动指代创建热通量的活动。在这种情况下,依赖于压电模块的电热特性。
53.根据本发明,第二信号134可以与根据本发明的热机械致动器100的压电元件120中应用的压电材料的机械特性相关联。具体地,第二信号134可以是用于控制压电模块的机械行为的机械致动信号,或者是表示压电模块的机械状态的机械感测信号。在后一情况下,压电模块(例如压电模块的压电元件)被用作传感器,即压力或应变传感器。在这种情况下,根据本发明的热机械致动器的压电模块的压电元件可以根据其受到的应变或压力而生成电场。在前一情况下,压电模块(例如压电模块的压电元件)被用作机械致动器。它可以根据施加在其上的电场而变形。
54.根据本发明的热机械致动器因此可以以各种操作模式应用,由此机械操作模式与热操作模式组合。具体地,以下操作模式可以被标识:
55.根据本发明的热机械致动器可以以下列机械操作模式操作:
[0056]-与作为机械致动器的操作相对应的第一机械操作模式,
[0057]-与作为机械传感器的操作相对应的第二机械操作模式,根据本发明的热机械致动器可以在以下热操作模式下操作:
[0058]-与作为热致动器的操作相对应的第一热操作模式,
[0059]-与作为热传感器或温度感应器的操作相对应的第二热操作模式。
[0060]
在本发明的一个实施例中,如在根据本发明的热机械致动器中应用的压电元件以上述定义的操作模式的单个操作模式被应用或使用。这样的压电元件可以被称为单模压电元件或专用压电元件。在这样的实施例中,根据本发明的热机械致动器可以包括两个或更多个这样的元件,每个元件被配置为以特定的操作模式操作。
[0061]
图5示意性地示出了这样的实施例。图5示意性地示出了根据本发明的热机械致动器200,致动器200包括压电模块210,压电模块210包括第一压电元件220.1和第二压电元件220.2。在所示的实施例中,热机械致动器200还被配置为接收或提供第一信号232以及接收或提供第二信号234。在所示的实施例中,第一信号232被配置为由第一压电元件220.1接收或提供,而第二信号234被配置为由第二压电元件220.2接收或提供。
[0062]
在本发明的一个实施例中,压电元件220.1可以例如以与作为机械致动器的操作相对应的第一机械操作模式操作,而压电元件220.2可以例如以与作为热传感器的操作相对应的第二热操作模式操作。如将理解的,也可以设计操作模式的其他组合。具体地:
[0063]
压电元件220.1可以作为机械传感器操作,而压电元件220.2可以作为热传感器操作,或者
[0064]
压电元件220.1可以作为机械传感器操作,而压电元件220.2可以作为热致动器操作,或者
[0065]
压电元件220.1可以作为机械致动器操作,而压电元件220.2可以作为热致动器操作。
[0066]
附加地,根据本发明的热机械致动器也可以包括多于两个的压电元件,所述压电元件中的每个压电元件被配置为以上述操作模式中的一个操作模式操作。
[0067]
在本发明的一个实施例中,根据本发明的热机械致动器中应用的压电元件可以在上述定义的操作模式的多个不同操作模式中应用或使用。这样的压电元件可以被称为多模压电元件。
[0068]
图6示意性地示出了根据本发明的热机械致动器300的实施例,热机械致动器300包括这样的多模压电元件320。所示的热机械致动器300包括压电模块310、压电模块310包括压电元件320,具体是可以在不同操作模式下操作的压电元件。如图所示的热机械致动器300还被配置为接收或提供第一信号332以及接收或提供第二信号334。在所示的实施例中,第一信号332和第二信号334被配置为通过压电模块310、特别是压电模块310的多模压电元件320来接收或提供。
[0069]
在一个实施例中,第一信号332可以例如被配置为将压电元件320控制为以与作为机械致动器的操作相对应的第一机械操作模式操作,而第二信号334可以例如被配置为将压电元件320控制为以与作为热致动器的操作相对应的第一热操作模式操作。
[0070]
在备选实施例中,第一信号332可以例如被配置为将压电元件320控制为以与作为机械致动器的操作相对应的第一机械操作模式操作,而第二信号334可以是在压电元件320在与作为热传感器的操作相对应的第二热操作模式下操作时由压电元件320提供的热机械致动器的输出信号。
[0071]
在又一实施例中,根据本发明的热机械致动器包括两个或更多个多模压电元件。这样的实施例被示意性地示出在图7中。
[0072]
图7示意性地示出了根据本发明的热机械致动器400的实施例,热机械致动器400包括两个多模压电元件420.1和420.2。如图所示的热机械致动器400包括压电模块410,压电模块410包括第一多模压电元件420.1和第二多模压电元件420.2,即,可以在不同的操作模式下操作的压电元件。如图所示的热机械致动器400还被配置为接收或提供第一信号432以及接收或提供第二信号434。在所示的实施例中,第一信号432和第二信号434被配置为由压电模块410的第一多模压电元件420.1接收或提供。如图所示的热机械致动器400还被配置为接收或提供第三信号436以及接收或提供第四信号438。在如图所示的实施例中,第三信号436和第四信号438被配置为由压电模块410的第二多模压电元件420.2接收或提供。
[0073]
在这样的实施例中,第一信号432和第二信号434可以例如与分别作为机械传感器和机械致动器的热机械致动器的操作相关联,而第三信号436和第四信号438可以例如与分
别作为热传感器和热致动器的热机械致动器的操作相关联。
[0074]
在本发明中,公开了热机械致动器,其被配置为在热操作模式和机械操作模式二者下操作。在一个实施例中,如以下将更具体说明的,热机械致动器可以被配置为同时在两种操作模式下操作。在这样的实施例中,根据本发明的热机械致动器可以例如作为温度传感器操作,并且同时作为机械执行器操作。这样的功能可以被并入单个压电元件中,或者并入多个(例如两个)压电元件的组合中。在一个实施例中,热机械致动器可以被配置为以两个或更多个操作模式交替地操作,例如在感测模式和致动模式下交替操作,或者在热致动模式和机械致动模式下交替操作。
[0075]
在本发明中,描述了利用一个或多个压电元件的热机械致动器。这样的元件通常是已知的,并且当对其施加电场时表现出变形的特性,并且相反地,当对其施加压力或应变时生成电场。这些元件中应用的压电材料还表现出行为或特性,即所谓的电热行为或热电行为。电热行为,也被称为电热效应(ece),指代压电材料在元件内部的电场发生变化或电场被施加时改变其温度的特性。热电效应指代相对的效应,即,压电元件中的温度变化导致压电元件中产生或发生电场。电热效应(ece)已在文献中得到充分证明。可以例如参考:https://www.springer.eom/gp/book/9783642402630,correia、tatiana和zhang,qi的“electrocaloric materials,new generation of coolers”。
[0076]
在根据本发明的热机械致动器中,利用了压电材料的压电和电热性质。具体地,在一个实施例中,当在热机械致动器的压电模块的压电元件内部施加电场时,根据本发明的热机械致动器可以作为机械致动器操作,所述电场导致压电元件变形。注意,这对应于如上所述的第一机械操作模式。在一个实施例中,当在压电模块的压电元件内部生成电场时,根据本发明的热机械致动器还可以作为机械传感器操作,所述电场由压电元件的变形引起。注意,这对应于如上所述的第二机械操作模式。
[0077]
关于电热效应(ece),可以指出该过程或效应可以被认为是基本上绝热的。这意味着,当电场被施加到压电材料时,将发生温度变化。这样的温度变化将导致包括压电材料的压电元件改变其相对于其周围环境(例如连接或安装压电元件的部件)的温度。在这种情况下,根据温度变化的符号,温度变化将导致热通量流向压电元件或从压电元件流出。
[0078]
关于所描述的效应,可以进一步指出,根据所应用材料的晶体结构的取向,这些效应方向相关。以上提到的效应可以通过张量来描述,张量可以例如描述电场e的施加与电场的机械和热效应之间的相关性,电场e可以被表示为三个正交方向x、y、z上的方向场(ex、ey、ez)。请注意,机械效应可以包括压电元件的伸长或压缩,但也可以包括剪切效应。还可以指出,所感知的机械和热效应也可能与所施加电场的频率相关。
[0079]
为了在压电元件内部生成上述电场或感测在一个或多个压电元件内部感应或生成的任何电场,在根据本发明的机械致动器中应用的一个或多个压电元件可以被提供有一个或多个电极。
[0080]
图8示意性地示出了压电元件820,压电元件820可以应用于根据本发明的热机械致动器的压电模块中。在所示的实施例中,压电元件820具有立方体形状并且被提供有电极对,底电极820.1和顶电极820.2。在一个实施例中,底电极820.1可以例如被连接到接地或接地电位830。当顶电极820.2被连接到电压源840并且被提供有电压信号842时,电场ez在压电元件820中生成,电场ez在所指示的z方向上被引导。在一个实施例中,这样的电场ez可
以例如使得压电元件820变形,例如,拉长、压缩或剪切。在这种情况下,提供给电极820.1的电压信号842也可以被称为机械致动信号。在一个实施例中,由电压信号生成的电场ez也可以引起压电元件的温度变化。在这种情况下,电压信号842也可以被称为热致动信号。
[0081]
在本发明的实施例中,根据本发明的热机械致动器被配置为既作为机械致动器又作为热致动器操作,由此致动信号被组合或叠加。在这样的实施例中,机械致动信号可以例如是用于生成dc电场ez_dc的dc信号,dc电场ez_dc导致压电元件800变形,而热致动信号例如可以是用于生成ac电场ez_ac的ac信号,ac电场ez_ac引起压电元件800中的温度变化。在这样的实施例中,ez=ez_dc ez_ac。关于这样的实施例,可以指出,发生温度变化可能与ac电场ez_ac的频率相关。还可以提及,当ac电场ez_ac的频率较低时,对机械致动的影响可能较小,从而使得能够实现机械致动和热致动的基本独立控制。作为用于生成ac电场ez_ac的ac信号的备选方案,也可以应用以特定占空比或频率接通和关断的dc信号。
[0082]
在一个实施例中,电压源840可以包括用于生成所需的控制信号或操作信号842的控制单元。
[0083]
用于获得对所施加或期望的操作模式的基本独立控制的备选方式是应用多个电极,多个电极被配置为在所应用的一个或多个压电元件中生成不同方向的电场。通过选择合适的压电材料和一个或多个元件和电极的合适取向,热和机械操作模式可以被解耦。
[0084]
图9示意性地示出了可以在这样的操作模式中应用的压电元件920。压电元件920可以例如应用于根据本发明的热机械致动器的压电模块中。在所示的实施例中,压电元件920具有立方体形状并且被提供有包括底电极920.1和顶电极920.2的第一电极对以及包括左侧电极920.3和右侧电极920.4的第二电极对。在一个实施例中,底电极920.1和右侧电极920.4可以例如被连接到接地或接地电位930。当顶电极920.2被连接到电压源940并且被提供有电压信号942时,电场ez在压电元件920中生成,电场ez在所指示的z方向上被引导。在一个实施例中,这样的电场ez可以例如使得压电元件920变形,例如拉长、压缩或剪切。在这种情况下,提供给电极920.2的电压信号942也可以被称为机械致动信号。当左侧电极920.3被连接到电压源940并且被提供电压信号944时,电场ex在压电元件920中生成,电场ex指向所指示的x方向。在一个实施例中,这样的电场ex可以例如引起压电元件920的温度变化。在这种情况下,电压信号944也可以被称为热致动信号。
[0085]
在一个实施例中,电压源940可以包括用于生成所需的控制信号或操作信号942和944的控制单元。
[0086]
在一个实施例中,根据本发明的热机械致动器中应用的压电模块包括多个压电元件,所述元件中的每个元件被提供有一个或多个电极,用于接收致动器信号或提供感测信号。
[0087]
图10示意性地示出了可以在根据本发明的热机械致动器中应用的压电模块1010。在如图所示的实施例中,压电模块1010包括两个压电元件1020.1和1020.2,每个压电元件具有立方体形状并且被提供有电极对,即,底电极1000.11、1000.21和顶电极1000.12、1000.22。在一个实施例中,底电极1000.11、1000.21可以例如被连接到接地或接地电位1030。可以指出,两个压电元件1020.1、1020.2或者一般地应用的多个元件可以具有公共电极,例如公共接地电极。以及1020.1和1020.2可以例如以与上述类似的方式进行控制。作为示例,顶电极1020.12被连接到电压源1040并被提供电压信号1042,电场ez在压电元件
1020.1中生成,电场ez指向所指示的z方向。在一个实施例中,这样的电场ez可以例如使得压电元件1020.1变形,例如拉长、压缩或剪切。此外,元件1020.2的顶电极1020.22可以被连接到电压源1040并且被提供电压信号1044,导致在压电元件1020.2中生成电场ez,电场ez指向所指示的z方向。在一个实施例中,这样的电场ez可以例如使得压电元件1020.2升温或冷却。
[0088]
如本领域技术人员将理解的,压电元件820或920或压电模块1010可以被组合为形成更大或更具体的热机械致动器。在一个实施例中,根据本发明的热机械致动器包括多个压电元件或压电模块,所述元件或模块例如被布置在一维阵列或二维阵列中。
[0089]
借助这样的热机械致动器,可以获得物体的具体的热和机械控制。
[0090]
在光刻设备中,在各种位置处和各种过程期间期望和/或需要这样的具体的热和机械控制。参考上述光刻设备和曝光或图案化过程,可以例如指出,需要在与衬底或图案形成装置表面平行的平面中以及在与辐射束或经图案化的辐射束平行的方向上准确定位衬底和/或图案形成装置。需要这种精确定位来确保经图案化的辐射束相对于衬底(特别是相对于衬底上先前提供的图案)精确定位。为了获得这样的精确定位,还需要对衬底和图案形成装置进行精确的温度控制。附加地,可以指出,照射系统il和投影系统ps包括一个或多个光学元件,例如反射镜或透镜,一个或多个光学元件也需要从热和机械角度进行精确控制,以将经图案化的辐射束准确地成形和定位。
[0091]
因此,在本发明的实施例中,根据本发明的热机械致动器被应用于控制光刻设备的部件或者在光刻设备中使用或在光刻设备中处理的物体。这样的部件的示例包括但不限于用于保持物体(诸如图案形成装置或衬底)的载物台、用于夹持物体(例如图案形成装置或衬底)的夹具(例如真空或静电夹具)、诸如反射镜和透镜的光学元件。这样的实施例可以例如被描述为组件,组件包括:
[0092]
用于光刻设备的部件,以及
[0093]
根据本发明的热机械致动器,
[0094]
其中热机致动器被配置为控制部件的热行为和机械行为。
[0095]
图11示意性地示出了这样的组件。图11示意性地示出了根据本发明的用于光刻设备的部件1150和多个热机械致动器1100。如图所示的部件1150可以是例如光学部件,特别是被配置为反射入射辐射束1160的反射镜。根据本发明,热机械致动器1100可以控制部件的热和机械行为和/或感测部件的热和机械行为。在所示的实施例中,每个致动器1100包括两个压电元件1120,以例示致动器的热和机械双重功能。在所示的实施例中,热机械致动器1100被安装到在该实施例中为反射镜的部件1150的底表面1150.1。注意,根据部件1150的取向,致动器仅支撑部件1150就足够了。通过对致动器1100的适当控制,即,通过向致动器提供适当的致动信号或获得感测信号,热和机械行为二者均可以被控制。具体地,热机械致动器1100可以例如被配置为在底表面1150.1上施加力,结果使得反射镜的顶表面1150.2变形。通过这样做,顶表面1150.2,即,反射入射束1160的表面可以被带到或保持在所需或期望的形状和/或位置。类似地,热机械致动器1100可以被配置为控制部件的热行为,例如,部件的温度或温度分布。这可以例如如上所述,通过适当加热或冷却热机械致动器的压电元件来实现。通过这样做,可以获得或维持部件1150的期望温度或温度分布。在一个实施例中,热机械致动器1100可以例如被安装到公共框架。这样的布置如图12所示。
[0096]
图12示意性地示出了根据本发明的用于光刻设备和热机械致动器1200的部件1250。如图所示的部件1250可以是例如光学部件。在所示实施例中,热机械致动器1200包括多个压电元件1220。在所示实施例中,热机械致动器1200,特别是致动器的压电元件1220,被配置为与部件1250的底表面1250.1接合。在这样的实施例中,部件1250的底表面1250.1可以例如与压电元件1220的端部表面接触。这样的端部表面例如可以形成用于支撑部件1250的支撑表面或者可以安装部件1250的安装表面。通过对致动器1200的适当控制,即,通过向致动器1200的压电元件1220提供适当的致动信号或获得感测信号,部件1250的热行为和机械行为二者均可以被控制。在所示的实施例中,压电元件1220被安装到公共构件或框架1270。这样的框架可以例如包括基本上刚性的结构,该结构例如由具有低热膨胀系数或热膨胀系数与部件材料相同或大致相同的材料制成。优选地,框架1270由具有高导热性的材料制成或包括具有高导热性的材料,例如以便于去除从部件1250提取的热量。在所示的实施例中,框架1270的顶表面1270.1被提供有公共接地电极,用于将压电元件接地。备选地,部件1250的底表面1250.1可以被提供有这样的接地电极。在本发明的一个实施例中,公共框架1270可以例如用作散热器,用于从部件1250中去除热量。
[0097]
图13示意性地示出了根据本发明的热机械致动器的更具体的操作模式,由此热操作模式和机械操作模式被组合。图13示意性地示出了可以由根据本发明的热机械致动器执行的操作序列。在图13中,1300表示待被控制的部件,1310表示散热器,即,例如借助冷却剂例如被保持在基本恒定温度处的质量。1320表示根据本发明的热机械致动器的压电元件,1330和1340是热机械致动器的相邻压电元件的部分。图13(a)图示了操作模式或循环的初始状态。在图13(a)中,箭头1350表示在初始状态下施加到压电元件1320的电场。在该实施例中,假设当存在电场1350时元件1320处于热中性状态。进一步假设电场1350的去除将导致压电元件1320中的温度下降并且电场的施加(或重新施加)将导致压电元件1320的温度升高。在热中性状态下,可以假设元件1320的温度基本上对应于散热器1310的温度。
[0098]
在操作循环的第一步骤中,如图13(b)所示,电场1350被去除,使得压电元件1320冷却。结果,从部件1300到元件1320的热通量1360将导致元件升温。换言之,压电元件1320将从部件1300吸收热量。
[0099]
在操作循环的第二步骤中,如图13(c)所示,具有与电场1350不同的取向的电场1370被施加到元件1320,所述电场1370引起压电元件1320压缩。可以看出,所述压缩导致在部件和元件1320的顶表面1320.1之间生成间隙。
[0100]
在操作循环的第三步骤中,如图13(d)所示,电场1350或具有类似取向的场被重新施加,使得元件1320升温。结果,热通量1380将从压电元件1320朝向散热器1310发生。一旦热通量1380已被传递到散热器1310,电场1370可以被移除,导致元件伸长并且使得致动器再次处于图13(a)的初始状态中。该状态如图13(e)所示。通过重复上述循环,热量可以例如从经受热负荷的物体上移除,物体例如是来自光学系统(诸如光刻设备的投影系统或照射系统,或这个光刻设备中使用的图案形成装置或衬底)的部件。
[0101]
在本发明的一个实施例中,所应用的一个或多个热机械致动器的操作模式可以随时间变化。这样的实施例在图14中示意性地图示。
[0102]
图14示意性地图示了通过经图案化的辐射束1410对衬底1400的曝光过程。在所示的实施例中,衬底1400由根据本发明的热机械致动器1430的多个压电元件1420支撑。在所
示的实施例中,热机械致动器1430被安装到散热器1440,所述散热器1440被提供有用于接收冷却剂的冷却通道1442。衬底、致动器和散热器的组件被安装到定位装置1450,定位装置1450被配置为在如箭头1460所示的方向上,相对于辐射束1410移动衬底1400。在所示的实施例中,压电元件1420主要被用于控制衬底1400的位置,即,它们以机械致动模式操作。为了考虑由辐射束1410提供的热负荷,某些元件1420(所述元件以黑色填充)以热模式操作为从衬底1400去除热量。因此,在所示的实施例中,致动器1430的元件1420的操作模式与辐射束1410和元件1420的相对位置相关。
[0103]
可以提及的是,在根据本发明的热机械致动器中,可以应用多种材料作为压电元件,诸如包括pzt、pmn-pt、pzn、batio、linbo3等的材料。
[0104]
为了制造根据本发明的热机械致动器,可以应用各种技术,类似于应用于经典压电致动器的制造技术。附加地,还可以应用包括pld、旋涂或喷涂的薄膜技术。
[0105]
尽管在本文中可以具体参考在ic的制造中使用光刻设备,但是应当理解,本文描述的光刻设备可以具有其他应用。可能的其他应用包括制造集成光学系统、磁域存储器的引导和检测模式、平板显示器、液晶显示器(lcd)、薄膜磁头等。
[0106]
《应用领域》
[0107]
尽管在本文中可以在光刻设备的上下文中具体参考本发明的实施例,但是本发明的实施例可以在其他设备中使用。本发明的实施例可以形成掩模检查设备、量测设备或测量或处理诸如晶片(或其他衬底)或掩模(或其他图案形成装置)的物体的任何设备的一部分。这些设备通常可以被称为光刻工具。这样的光刻工具可以使用真空条件或环境(非真空)条件。
[0108]
尽管以上已对本发明的实施例在光学光刻的上下文中的使用进行了具体参考,但是应当理解,在上下文允许的情况下,本发明不限于光学光刻并且可以被用于其他应用,例如压印光刻。
[0109]
在上下文允许的情况下,本发明的实施例可以在硬件、固件、软件或其任何组合中实现。本发明的实施例还可以被实现为机器可读介质上存储的指令,指令可以由一个或多个处理器读取和执行。机器可读介质可以包括用于以机器(例如,计算设备)可读的形式存储或传输信息的任何机制。例如,机器可读介质可以包括只读存储器(rom);随机存取存储器(ram);磁性存储介质;光存储介质;闪存设备;电、光、声或其他形式的传播信号(例如,载波、红外信号、数字信号等)等。此外,固件、软件、例程、指令可以在本文中被描述为执行某些动作。然而,应当理解,这样的描述仅是为了方便,并且这样的动作实际上由执行固件、软件、例程、指令等的计算设备、处理器、控制器或其他设备产生,并且这样做可能导致致动器或其他设备与物理世界交互。
[0110]
虽然以上已描述了本发明的特定实施例,但是应当理解,本发明可以以不同于所描述的方式来实现。以上的描述旨在例示,而不是限制。因此,对于本领域的技术人员来说显而易见的是,可以在不脱离以下提出的权利要求的范围的情况下,对所描述的本发明进行修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
