1.本发明涉及双向驱动器技术领域,特别涉及一种基于柔性梁结构和记忆金属的双向驱动器。
背景技术:
2.航天器的空间展开机构、航空炸弹保险等设备上所用的锁紧装置,需要实现锁紧和解锁双向驱动的功能。例如,航天器的空间展开机构在轨展开到位后,需要锁紧装置对其展开状态进行锁定;当航天器需要做机动变轨时,展开机构需要收拢,锁紧装置解除锁定;收拢到位后,再次对收拢后结构进行锁定限位。这就需要锁紧装置可以实现双向驱动,并提供锁紧位和解锁位两个稳定状态。
3.现有的双向驱动器主要是电磁铁式驱动器,其工作的基本原理是:对电磁铁通电,使衔铁吸合推动锁销伸出,实现锁紧功能;电磁铁断电,偏置弹簧推动衔铁复位,进而带动锁销缩回,实现解锁功能。因此电磁铁式的双向驱动器可以实现通电锁紧、断电解锁,或者是通电解锁、断电锁紧的状态切换。
4.这种驱动器虽然能够实现双向驱动功能,但其锁紧位和解锁位两个稳定状态中,有一个必然需要持续对电磁铁通电才能维持,一旦供电系统出现异常,锁销就会出现意外的运动。此外,由于电磁铁吸合力远大于偏置弹簧的弹簧力,因此这种驱动器锁销伸出或缩回的驱动力相差较大,无法做到推出和缩回力相近,使用可靠性受限。还有,电磁铁中的衔铁质量大,导致驱动器的功重比小,输出的锁紧载荷有限,不适用于狭小空间;而用于航空炸弹保险的双向驱动器,质量大会导致驱动器惯性大,在战斗机机动飞行时的大过载可能会引起保险意外动作,安全性不足。
技术实现要素:
5.本发明针对现有电磁铁式双向驱动器的不足,提供了一种采用柔性稳态结构的双向驱动器,该驱动器在解锁位和锁紧位均可保持稳定,可重复使用,可靠性高、安全性好。
6.本发明采用的技术方案为:一种采用柔性稳态结构的双向驱动器。包括滑销、保持架、外壳、sma丝、柔性梁等。该驱动器通过保持架的法兰边安装在固定结构上,对sma丝通电可驱动滑销沿保持架的内腔移动,滑销伸出时分离结构锁定,防止其相对于固定结构发生运动,滑销缩回时解除对分离结构的限位。滑销是驱动器的作动元件,保持架和外壳组成驱动器的外形支撑,同时为滑销提供移动轨道,sma丝有两根,分别为滑销的上下移动提供驱动力,柔性梁为滑销在完全伸出和完全收缩状态提供保持稳定的驱动力。
7.其中,所述滑销为本发明的作动元件,中部设有梁安装孔,中上部和底部分别设有一个sma丝安装孔,两者正交,用于布置收缩sma丝和伸出sma丝。
8.其中,所述保持架和外壳配合组成本发明驱动器的外形支撑。保持架纵向的管状结构内腔为滑销提供上下移动的轨道,管状结构上与滑销的梁安装孔和sma丝安装孔对应部位处设有腰型孔,为柔性梁结构和sma丝的驱动过程提供运动空间;外壳的纵向侧壁上设
有sma丝的布置孔和支架的定位台阶。
9.其中,所述sma丝包括一根收缩sma丝和一根伸出sma丝,分别从滑销的sma丝安装孔穿过,并固定在外壳侧壁外。两根丝对拉驱动,滑销收缩过程,收缩sma丝是主动丝,伸出sma丝是被动丝;滑销伸出过程则相反。
10.其中,所述柔性梁为双梁或多梁组成的柔性梁组合结构;梁向上弯曲到最大挠度时,可使驱动器维持在锁紧位稳定状态,此时滑销完全伸出;梁向下弯曲到最大挠度时,可使驱动器维持在解锁位稳定状态,此时滑销完全收缩。
11.进一步地,所述柔性梁,可以是常见的矩形梁,也可以是锥型薄板结构。
12.进一步地,保持架和外壳的连接部位,包括但不限于采用螺纹、胶粘的连接方式。
13.进一步地,sma丝与外壳、滑销、保持架之间需要进行绝缘处理。绝缘方式可以在sma丝外设置聚四氟乙烯耐高温绝缘套管,也可以通过绝缘氧化、陶瓷基绝缘涂层、高分子绝缘涂层等工艺对sma丝、外壳、滑销、保持架进行整体绝缘,不作具体限制。
14.本发明中,驱动器在两个稳定状态切换时,滑销移动需要克服的阻力包括:
①
滑销与保持架等结构的摩擦力,
②
被动sma丝的抗拉张力,
③
柔性梁到达跳跃屈曲临界状态前,梁的弯曲变形力。滑销移动的驱动力来自两个方面:
①
主动sma丝受热收缩产生的驱动力,
②
柔性梁经过跳跃屈曲临界状态后,梁的弯曲变形力。因此,本发明驱动过程中,在柔性梁跳跃屈曲前后,梁的弯曲变形力作用不同。
15.本发明驱动器的双向驱动过程依靠对拉的两根sma丝实现,而稳定状态则依靠柔性梁结构保持。驱动过程即稳定状态的切换过程,具体是:对主动sma丝通电使其受热收缩,从而驱动滑销移动,当滑销移动一定距离后,柔性梁会发生跳跃屈曲,此后停止对主动sma丝通电,在柔性梁的变形力作用下,滑销可继续移动,直至柔性梁弯曲到最大挠度,驱动器进入稳定状态。
16.本发明的双向驱动器,相比传统的电磁铁式双向驱动器,其优势表现在:
17.(1)利用双梁或多梁的双稳态柔性结构,使驱动器的滑销在完全伸出和完全缩回状态均可保持稳定,克服了现有电磁铁式双向驱动器需要持续通电才能保持稳定的缺点。
18.(2)能够实现自动复位,可重复工作,滑销伸出和缩回的驱动力基本相同,驱动器双向驱动过程的难易程度相当,可靠性高。
19.(3)运动部件无衔铁,质量轻、惯性小、功重比大,能在狭小空间内实现大载荷输出,安全性高。
附图说明
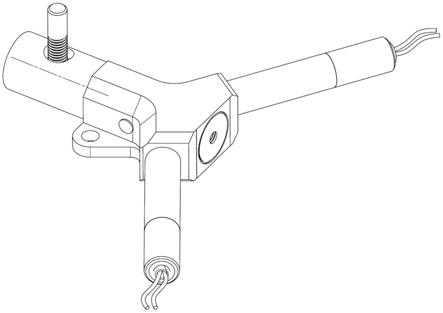
20.图1为本发明锁紧位稳定状态的示意图;
21.图2为本发明柔性梁处于跳跃屈曲临界状态的示意图;
22.图3为本发明解锁位稳定状态的示意图;
23.图4为本发明采用双稳态柔性梁的反作用力与位移的关系曲线;
24.图5为本发明采用单稳态柔性梁的反作用力与位移的关系曲线。
具体实施方式
25.以下结合附图和具体实施方式进一步阐述本发明的原理。
26.本发明提供一种采用柔性稳态结构的双向驱动器,如图1~图3所示,包括滑销1、保持架2、外壳3、收缩sma丝4、伸出sma丝5、柔性梁6、支架7。滑销1是驱动器的作动元件,保持架2为滑销1提供移动轨道,两根sma丝分别为滑销1的上下移动提供驱动力,柔性梁6为滑销1在完全伸出和完全收缩状态提供保持稳定的驱动力。
27.滑销1为轴式结构,中部设有多组通孔(以下简称梁安装孔),用于布置柔性梁6;中上部和底部还设有两个正交的通孔(以下简称sma丝安装孔),用于布置收缩sma丝4和伸出sma丝5。
28.保持架2近似倒t型结构,外壳3近似t型结构,两者配合组成驱动器的外形支撑。其中,保持架2纵向的管状结构内腔为滑销提供上下移动的轨道,管状结构上与滑销1的梁安装孔和sma丝安装孔对应部位处设有腰型孔,为柔性梁结构和sma丝的驱动过程提供运动空间;外壳3的纵向侧壁上设有sma丝的布置孔和支架7的定位台阶。
29.收缩sma丝4和伸出sma丝5正交设置,分别从滑销1的sma丝安装孔穿过,并固定在外壳3侧壁外。两根丝对拉驱动,滑销收缩过程,收缩sma丝4是主动丝,伸出sma丝5是被动丝;滑销伸出过程则相反。
30.柔性梁6为多根柔性梁组成的组合结构(本实施例图示为三根柔性梁的组合结构),梁的两端支撑在支架7上,中部从滑销1上的梁安装孔穿过;梁向上弯曲到最大挠度时,可使驱动器维持在滑销完全伸出的锁紧位稳定状态,梁向下弯曲到最大挠度时,可使驱动器维持在滑销完全收缩的解锁位稳定状态。
31.本发明驱动器的双向驱动过程依靠对拉的收缩sma丝4和伸出sma丝5实现。
32.解锁驱动过程为:从驱动器的锁紧位稳定状态开始,如图1所示,滑销1完全伸出,柔性梁6上弯到最大挠度,梁的变形特性使滑销1保持不动;需要解锁时,收缩sma丝4是主动丝,对其通电使其受热收缩,从而驱动滑销1下移,当滑销移动到图2所示位置时,柔性梁6发生跳跃屈曲,此后停止对收缩sma丝4通电,在柔性梁6的变形力作用下,滑销1可继续下移,直至柔性梁6下弯到最大挠度,滑销1完全收缩到图3所示位置,即驱动器的解锁位稳定状态。
33.锁紧驱动过程则以伸出sma丝5为主动丝,驱动滑销1伸出的运动过程,具体工作过程与解锁驱动过程同理。
34.图4给出了本发明驱动器状态切换过程中的柔性梁的反作用力与位移的关系曲线。以驱动器由锁紧位向解锁位的切换(即滑销收缩的过程)为例进行说明。a点对应驱动器锁紧位稳定状态,此时,滑销1完全伸出,柔性梁6上弯到最大挠度,其反作用力为0。对收缩sma丝4通电,使其收缩为滑销1提供向下的驱动力,随着滑销1下移,柔性梁6的反作用力逐渐增大,当达到柔性梁6跳跃屈曲的临界位置时,其反作用力达到最大值(图示b点)。此后,柔性梁6发生跳跃屈曲,梁结构失稳,出现负刚度效应,反作用力迅速减小到一个局部最小值(图示d点),然后增大并维持为0(图示e点),此时柔性梁6到达下弯最大挠度,滑销1完全收缩,驱动器进入解锁位稳定状态。
35.需要特别说明的是,在图4中,从a点到c点,滑销需要依靠主动sma丝通电加热产生的驱动力才能移动,而从c点到e点,驱动器不需要任何能量输入,仅依靠柔性梁的结构失稳即可实现滑销迅速移动,降低了驱动器对于sma丝的要求。
36.本发明中,梁的尺寸决定了梁变形过程中的反作用力大小,驱动器依靠柔性梁结
构来保持稳定状态,上述实施例给出的是能够实现锁紧位稳定和解锁位稳定的双稳态柔性梁。可以理解,通过改变梁的尺寸,也可以获得单稳态柔性梁结构。此时,柔性梁的反作用力与位移的关系曲线如图5所示,梁结构只有一个稳定状态。以具有锁紧位稳定状态为例,正常情况下滑销伸出,驱动器保持锁紧位稳定,需要解锁时,对sma丝通电驱动滑销缩回;由于梁结构只有一个稳态,一旦sma丝停止通电,sma丝的驱动力消失,梁结构的弯曲变形力会自动将滑销推出,驱动器再次进入锁紧位。此方案可满足通电解除稳定、断电恢复稳态的单稳态驱动器的应用场合。
37.需要说明的是,以上所述涉及方位的表述,如内、外、上、下等,均基于附图所示方向和位置关系,仅为了便于描述,而不是指示或暗示所涉及的零件必须具有特定的方位、构造或操作。
38.本发明未详细阐述的属于本领域公知技术。凡是依据本发明原理和技术实质对以上实施例子所做的任何修改、等同变化与修饰、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。