1.本技术涉及呼吸模式测量技术,尤其涉及一种呼吸运动测量装置以及测量方法。
背景技术:
2.呼吸是人体极其重要的生命体征参数之一,蕴含丰富的生理、病理、应激和心理等多方面的信息,与人体的生命健康息息相关。据已有研究表明,2012年城市及农村居民主要疾病死亡率中,呼吸系统疾病在死亡病因中均占第四位,呼吸系统疾病严重危害我国人民健康。其中慢性阻塞性肺疾病(copd)是一种具有气流阻塞特征的慢性支气管炎和(或)肺气肿,可进一步发展为肺心病和呼吸衰竭的常见慢性疾病。与有害气体及有害颗粒的异常炎症反应有关,致残率和病死率很高,全球40岁以上发病率已高达9%~10%。
3.copd患者治疗中一个重要的目标是保持良好的肺功能,只有保持良好的肺功能才能使患者有较好的活动能力和良好的生活质量。因此呼吸功能锻炼非常重要。患者可通过做呼吸训练、呼吸操等进行呼吸功能锻炼。
4.根据呼吸部位对人体呼吸模式进行分类,主要包括肩部呼吸、胸部呼吸、腹部呼吸和完全呼吸(胸腹呼吸)。传统的呼吸信号检测方法主要通过各类传感器件或探针接触人体进行呼吸信号的检测,包括:温度传感器检测、流量传感器检测、电容式传感器检测、应变式传感器检测、阻抗法检测等,这些方法均是要在受试者的身体上设置电路传感器,传感器本身以及传感器的电源会给受试者带来不适的感觉;另外,目前无法对呼吸模式及呼吸训练准确性进行量化,造成患者训练无数据支撑,看不到病症改善,降低训练积极性,影响训练效果。
技术实现要素:
5.鉴于上述问题,本技术的一个目的在于提出一种呼吸运动测量装置以及测量方法,该测量装置和方法不需要在受试者身上设置测量呼吸运动的电路传感器及电源,受试者在测量过程中受到测量设备带来的不舒适感非常低;本技术还旨在提出一种呼吸运动测量装置以及测量方法,其能够给出受试者呼吸运动的量化分析结果,尤其是呼吸模式的量化分析结果。
6.本技术的呼吸运动测量装置,其包括:多个标记点、标记点位置变化捕捉单元、呼吸运动计算单元;
7.所述多个标记点设置在受试者的身体表面;
8.所述标记点位置变化捕捉单元用于捕捉所述多个标记点在受试者呼吸过程中的位置变化;
9.所述呼吸运动计算单元用于根据所述多个标记点在受试者呼吸过程中的位置变化计算该受试者的呼吸运动情况。
10.优选地,还包括:量化分析单元;
11.所述量化分析单元用于对所述呼吸运动情况进行分析而得到该受试者呼吸模式。
12.优选地,所述多个标记点设置在背心上;所述背心为弹性背心,能够贴合地穿在受试者身上。
13.优选地,所述多个标记点形成为多行;每行至少包括两个标记点。优选地,所述多个标记点分别设置在受试者的肩部位置、胸部位置、腹部位置。
14.本技术的呼吸运动测量方法,其包括:
15.在受试者身上设置多个标记点;
16.通过标记点位置变化捕捉单元来捕捉受试者在呼吸运动时,其上设置的标记点随着身体表面的起伏而发生的位置变化;
17.通过呼吸运动计算单元根据所述多个标记点在受试者呼吸过程中的位置变化计算该受试者的呼吸运动情况。
18.优选地,通过量化分析单元对所述呼吸运动情况进行分析而得到该受试者呼吸模式。通过量化分析单元得到受试者的潮气量、胸呼吸潮气量、腹呼吸潮气量、胸部呼吸贡献比、腹部呼吸贡献比、呼吸运动协调性、每分钟通气量中的至少一种。
19.优选地,所述标记点位置变化捕捉单元由kinect实现。
20.优选地,通过累加一行上的多个标记点的三维空间位移来得到受试者在该行标记点出的呼吸运动曲线。
21.优选地,所述标记点位置变化捕捉单元由激光发射器和摄像机实现;激光发生器将激光束照射到标记点上,反射的激光束被摄像机所捕捉。
22.通过本技术的呼吸运动测量装置以及测量方法,受试者无需在其身体上穿戴电路传感器和电源就可以使得低侵扰的呼吸运动测量;以及该呼吸运动的测量,还可以进一步作量化分析和呼吸模式的分析。
附图说明
23.图1为实施本技术的呼吸运动测量装置以及测量方法的背心的结构示意图;
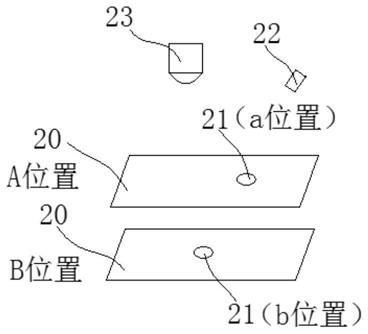
24.图2为利用激光设备实施标记点位置变化捕捉单元的原理示意图;
25.图3为利用kinect实施标记点位置变化捕捉单元的示意图;
26.图4为通过标记点提取的各位置的呼吸信号的示意图;
27.图5为多个标记点的信号累加示意图;
具体实施方式
28.下面,结合附图对本技术的呼吸运动测量装置以及测量方法进行详细说明。
29.本技术提供了一种呼吸运动测量装置及方法,通过对人体在放松状态(即不受电路传感器及其电源的侵扰)下自由呼吸(包括深呼吸和浅呼吸)进行监测,获取呼吸信号,定量地评估呼吸模式,如呼吸模式、胸腹呼吸运动协调性、胸腹呼吸贡献比等,可以了解患者的呼吸情况,为患者的健康状态量化分析和疾病病情分析、治疗效果量化评价提供辅助决策支持信息。
30.标记点可以是直接点在受试者的身体表面或者受试者的衣服上;但更优选地,标记点是设置在一个弹性背心上,有受试者穿着该背心进行测量。背心10,其上分布有多行、多个标记点,每行的点在背心前侧或者围绕背心一周,根据监测需要,标记点可以设置在背
心的靠近颈部、上胸部、腹部、下腹部的位置处,呈多行,每行可以包括多个标记点11,每一个标记点11都可以反映出呼吸运动引起的胸腹轮廓幅度变化。一个影像和视频捕捉设备(如基于kinect深度摄像头的人体动作识别和三维重建),即通过对标记点进行识别,捕捉受试者呼吸影像数据的运动捕捉设备;数据分析工作站31包括呼吸运动计算单元和量化分析单元,接收kinect装置32捕捉的标记点的运动的数据,实时显示根据标记点监测计算得到的呼吸运动曲线和呼吸率,并存储、处理和分析影像数据,定量地评估呼吸模式。呼吸运动计算单元和量化分析单元由数据分析工作站31执行相应的计算程序来实现。
31.背心10如图1所示,在其两个肩部位置分别设有多个标记点11,通过监测受试者肩部运动情况,获取受试者肩部呼吸信号;在背心的胸部和腹部位置,分别设置2-3排标记点11,每排自左至右等间距分布多个标记点,用于监测胸部呼吸及腹部呼吸运动情况,获取受试者胸部呼吸信号和腹部呼吸信号。
32.背心采用弹性材质面料设计,紧贴皮肤,在人体呼吸时,标记点能够随肩部、胸部和腹部的运动而相应移动,kinect设备32通过监测标记点的移动情况记录呼吸情况。
33.标记点位置变化捕捉单元为通过对标记点进行识别,捕捉受试者呼吸影像数据的运动捕捉设备。采用kinect设备、或者通过激光发射器和摄像机对标记点进行识别,可以用于人体呼吸信号的监测。
34.1)kinect设备工作原理
35.kinect设备是一种依靠相机捕捉三维空间中人体运动的深度传感器,能收集视野范围内的每一点,以每秒30帧的速度生成深度图像流,实时3d地再现周围环境。安装有3个镜头,分别为rgb彩色摄像头、红外线发射器和红外线投影机。rgb彩色摄像头主要用于识别人脸和身体特征,红外线发射器和红外线投影机分别用于发射和接收红外线,以提供深度信息数据。深度信息数据构成深度图像,通过内置算法对深度图像(深度信息数据)进行分析,实现对人体精确的定位。
36.利用三角测量原理计算物体的三维空间信息,通过公式1将深度图像中每个像素的深度(深度信息数据)转换到三维空间坐标系中。
[0037][0038]
x
p
:深度图像的水平坐标;
[0039]yp
:深度图像的纵向坐标;
[0040]zp
:像素点(x
p
,y
p
)的深度值;
[0041]
ph:水平方向上总的像素数;
[0042]
pv:竖直方向上总的像素数;
[0043]
θh:红外投影机的水平视角;
[0044]
θv:红外投影机的竖直视角;
[0045]
将标记点连续的深度信息数据转换到三维空间坐标系后,就可以计算出每个标记点在三维空间的位移,由于每个标记点的位移很小,转换到三维空间后在三维空间坐标轴方向上的位移会更小,所以将多个标记点的位移进行累加,起到信号增强的目的,比如人体在呼吸时1个标记点在x轴方向引起的位移是1mm,那8个标记点累计下来就是8mm,增加了信噪比,获得更高质量的信号;通过公式2将每一行的标记点及每一个标记点的位移进行累加
得到一条呼吸运动曲线,多条呼吸运动曲线结合起来就可以有效评估胸腹呼吸运动和模式。
[0046][0047]
x、y、z:标记点在x、y和z轴方向上的位移;
[0048]
i:每一行的第i个标记点;
[0049]
n:胸、腹部每一行标记点的数量或左、右肩部标记点的数量;
[0050]
通过kinect装置对可穿戴背心上标记点的识别,并利用三角测量原理计算标记点的三维空间信息计算出标记点的位移,进而将每个标记点随时间的运动情况在显示器上显示,完成对受试者呼吸的监测。通过信号增强算法,能够根据需要将某一横断面的呼吸运动幅度定量刻画出来,如上胸部呼吸、胸部呼吸、腹部呼吸、下腹部呼吸等等,克服了传统的基于生理信号传感器的呼吸运动捕捉方式,能够更加精细化的判断呼吸模式变化,评估训练效果。
[0051]
2)激光法检测呼吸信号原理
[0052]
如图2所示,激光发射器22放置在目标物体20上方,并以一定的角度由激光发生器22发射激光束,摄像机23放置于目标物体20正上方,用于采集下方目标物体20的图像。当目标物体由a位置移动到b位置时,投射到目标物上的点21也由a位置移动到b位置。目标物体代表实际系统中人体的背部或胸部,当呼吸运动进行时,激光点的位置便会随着做周期性的变化,从而监测呼吸信号。激光点的位置变化随采集时刻变化的关系曲线,即为呼吸曲线。
[0053]
人体在进行肩部呼吸、胸部呼吸和腹部呼吸时,由于呼吸动作不同,会造成标记点的运动轨迹不同。例如:肩部呼吸需要借助抬肩完成呼吸动作,所以肩部标记点的运动轨迹为上下运动;胸部呼吸通过胸廓的扩张和收缩完成呼吸,所以胸部位置标记点的运动轨迹为前后运动;腹部呼吸通过隔膜运动完成呼吸,通过膈膜的上下移动,腹内脏器上下移动,腹部向前膨出和复原完成呼吸,所以腹部标记点的呼吸运动也是前后运动。
[0054]
根据以上原理,将穿戴式背心穿在受试者身上,以肩部未抬起、胸部和腹部未扩张时的状态为初始状态。随着吸气的进行,肩部抬起,标记点向上移动,胸部扩张,标记点向前移动,腹部膨出,标记点向前移动,直至完成吸气动作。随着呼气的进行,肩部落下,标记点向下移动,胸部收缩,标记点向后移动,腹部复原,标记点向后移动,直至完成呼气动作,至此完成一次呼吸动作,即一个呼吸周期。并且,肩部抬起的幅度、胸部扩张的幅度、腹部膨出的幅度代表呼吸深度。以此来采集和标记受试者呼吸状态,制定呼吸量化标准值。
[0055]
采用多点位移累加技术,因为呼吸引起的标记点位移很小,为了更准确反应某一截面的呼吸运动,采用了信号累加增强方法,如图5所示。肩部、胸腹、腹部各截面呼吸信号趋势图如图4所示。
[0056]
数据分析工作站接收kinect装置采集的数据,并将影像数据和深度数据传输到显示器上,实时显示受试者的影像数据和呼吸信号数据,包括受试者肩部、胸部和腹部各个标记点的运动曲线、幅度以及呼吸率。通过数据选择、去噪及特征提取等方法对呼吸信号数据进行数据处理和分析,然后采用呼吸模式量化算法定量地评估呼吸模式,如每分通气量、胸部、腹部的呼吸贡献比及呼吸运动协调性等。
[0057]
呼吸模式量化算法的基础参数为潮气量。潮气量与年龄、性别、体积表面、呼吸习惯、肌体新陈代谢有关,正常情况下:成人潮气量为8-10ml/kg,小儿潮气量为6-10ml/kg。通过最小二乘法对采用流速仪获取的真实潮气量值进行校准并拟合,进而得到算法使用的潮气量值,这种获取潮气量值的方法具有较高的准确性和可信度。
[0058]
1)潮气量真实值
[0059]
通过流速仪测试得到人体呼吸吸气气流流速(v_ab),根据吸气时间(t_ab)计算潮气量(vt)。
[0060][0061]
2)潮气量校准
[0062]
对胸部、腹部呼吸进行合成,生成肺呼吸,用最小二乘法对潮气量进行校准并拟合,进而计算呼吸运动模式的各个参量。
[0063][0064]
vt:潮气量,波峰到下一个波谷之间的呼出气量总体积。
[0065]
k、m:胸部、腹部拟合系数;
[0066]
rc、ab:胸部、腹部位置标记点位移;
[0067]
n:胸部/腹部每排标记点的数量;
[0068]
m:胸部/腹部标记点排数;
[0069]
3)胸呼吸/腹呼吸贡献比
[0070]
胸部呼吸贡献比:
[0071]
腹部呼吸贡献比:
[0072]
根据胸部、腹部呼吸贡献比,能够定量了解受试者不同部位对呼吸的贡献,用于指导患者进行相应的呼吸训练,改善呼吸系统。
[0073]
4)胸腹呼吸运动协调性
[0074]
通过呼吸运动曲线的相位差的角度考察呼吸运动协调性。相位差的角度:用胸、胸腹呼吸数据,对一个呼吸两端的幅度最高点或最低点之间时间差dt,除以此呼吸的时长t的方法计算,即
[0075][0076]
5)每分通气量
[0077]
mv=vt*rr(公式8),rr:呼吸频率。
[0078]
本技术呼吸运动测量装置和方法,基于标记点随着受试者的呼吸运动而发生的位置变化来测量受试者的呼吸运动;其实施中采用kinect设备,利用三角测量原理计算标记点的三维空间信息,进而计算出标记点的位移,根据位移随时间的变化,描述出呼吸运动曲
线,得到受试者的呼吸信号。更重要的是,本技术采用多点位移累加技术,因为呼吸引起的标记点位移很小,现在的kinect类设备识别的分辨率不太高,勉强能够识别出单个点,那为了更准确反应某一截面的呼吸运动,采用了信号累加增强方法;本技术能够准确获得从胸到腹的多个截面的呼吸运动信息,从而精确地量化呼吸运动模式,包括胸、腹呼吸、协调性、贡献比等。
[0079]
除非另有定义,本技术中使用的所有技术和/或科学术语具有与由本发明所涉及的领域的普通技术人员通常理解的相同含义。本技术中提到的材料、方法和实施例仅为说明性的,而非限制性的。
[0080]
虽然已结合具体实施方式对本发明进行了描述,在本技术的发明主旨下,本领域的技术人员可以进行适当的替换、修改和变化,这种替换、修改和变化仍属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。