1.本实用新型涉及水下机器人技术领域,具体为一种具有收放缆功能的水下机器人。
背景技术:
2.水下机器人,或叫遥控无人水下机器人(remote operational vehicle,简称rov),是一种利用自身搭载的仪器设备在水下进行人为操纵作业的潜水设备。rov是目前世界上使用最为广泛的水下机器人,在海洋工程和军事等领域发挥着重要的作用。传统的rov存在作业能力相对较低、机动性差、视频传输的路数和传输距离受到限制、人机交互能力和可扩展性差等诸多方面问题,不能满足当今海洋、军事等相关行业或部门对rov的需求。
3.rov主要由水上的控制台,水下的中继器(tether management system,简称tms)和潜水器三部分构成。控制台主要用来操作潜水器和中继器,并把视频、传感器等信息通过监视器和人机界面显示出来;控制台与中继器之间主要通过绞车由承重缆连接,中继器与潜水器之间通过非承重缆连接。承重缆承担着潜水器和中继器的重量,非承重缆在水中接近零浮力;中继器通过承重缆把潜水器施放到某一作业水深,潜水器脱离中继器,通过控制中继器上收放非承重缆,使潜水器具有一定的作业半径,同时不受较重的承重缆影响。
4.但是,现有技术中,由于自身装置结构的影响,中继器与潜水器之间的线缆的长度受到一定限制,进而影响潜水器的水下作业范围。而且,二者之间的线缆回收释放为在中继器上进行收放缆方式,经常因为增大缆线的长度出现缆线积缆、乱缠等情况,严重影响潜水器在水下作业。
技术实现要素:
5.本实用新型针对现有技术中存在的缺点和不足,本实用新型提供了一种装置结构简单巧妙,通过安装收放缆加装层后,使水下机器人本身可实现存储缆的功能,具有可自动收放缆,其收放缆更加灵活方便,与中继器配合后,可实现绕中继器的大直径圆周范围内的作业,使其在水下拥有更大更广的作业范围,实现大范围作业的收放缆方式,满足实际使用需求的具有收放缆功能的水下机器人。
6.为实现以上目的,本实用新型通过以下技术方案予以实现:本实用新型提供的具有收放缆功能的水下机器人,包括依次通过线缆连接的控制器、中继器和水下机器人,水下机器人的底部安装有收放缆加装层,收放缆加装层为与水下机器人相匹配的框架式结构;
7.收放缆加装层的底部设有底板,底板整体结构为左右两端分别向上设有与水下机器人底部相匹配的支撑框架,其中间结构为由支撑框架围成的凹槽结构,位于凹槽结构的底板上安装有收放缆装置;
8.收放缆装置包括收放缆驱动减速电机和横向放置的卷缆盘,底板上固定有滑环装置,卷缆盘套接在滑环装置上;
9.收放缆驱动减速电机的输出轴与卷缆盘上端的转轴连接,通过收放缆驱动减速电
机的输出轴转动,带动卷缆盘在滑环装置上相对转动。
10.优选的,滑环装置包括配套的滑环定子和转子,滑环定子与底板固定连接,转子与卷缆盘固定连接,通过收放缆驱动减速电机的输出轴转动,带动卷缆盘在滑环定子上相对转动;
11.卷缆盘的下部与滑环装置的转子之间通过限位轴装置对其进行轴向限位固定。
12.优选的,支撑框架中还安装与卷缆盘相配合的线缆张紧装置,线缆张紧装置包括张紧电机和导线轮组合装置;
13.导线轮组合装置为设置于两块保护板之间的导线轮组合,其包括与张紧电机输出轴相连接的主动轮、从动轮,以及分别与改变主动轮、从动轮上线缆传输方向相匹配的导向轮。
14.优选的,穿过主动轮的张紧电机输出轴上还连接设有离合器。
15.优选的,收放缆加装层与水下机器人之间可拆卸固定连接。
16.优选的,水下机器人可进出中继器的内部,且水下机器人与中继器通过水密插头连接,水下机器人由中继器供电及传输信号。
17.优选的,中继器上安装有用于观察水下机器人出入其内部情况的摄像头。
18.优选的,水下机器人上设有与中继器电连接的水平推进器、垂直推进器、驱动器及电气仓。
19.本实用新型提供了一种具有收放缆功能的水下机器人。具备以下有益效果:
20.本实用新型的具有收放缆功能的水下机器人,结构简单巧妙,通过安装收放缆加装层后,使水下机器人本身可实现存储缆的功能,具有可自动收放缆,且使线缆收放过程中不积缆、不乱缠,回收释放方式相较于传统的中继器收放缆方式,其收放缆更加灵活方便。
21.另外,再与中继器配合后,可实现绕中继器的大直径圆周范围内的作业,使其在水下拥有更大更广的作业范围,实现大范围作业的收放缆方式,满足实际使用需求,可适用范围广。
附图说明
22.图1为本实用新型的水下机器人的结构示意图;
23.图2为图1的左视图的结构示意图;
24.图3为图1的右视图的结构示意图;
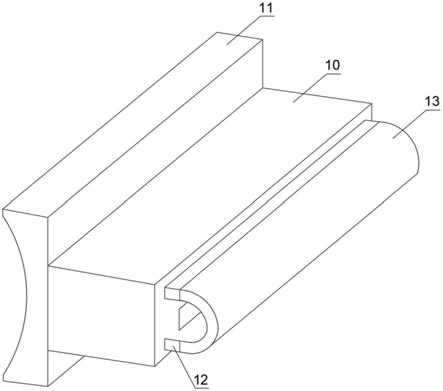
25.图4为图1的立体图的结构示意图;
26.图5为图1中收放缆加装层的结构示意图;
27.图6为图5的俯视图的结构示意图;
28.图7为图5的仰视图的结构示意图;
29.图8为图5中收放缆装置的结构示意图;
30.图9为图5中线缆张紧装置的结构示意图;
31.图10为图9的中导线轮组合装置的结构示意图;
32.图11为本实用新型的结构示意图(水下机器人位于中继器的电器仓内);
33.图12为本实用新型的结构示意图(水下机器人位于中继器的电器仓外);
34.图13为图12的立体图的结构示意图。
35.图中:1.中继器,2.水下机器人,3.底板,4.支撑框架,5.收放缆驱动减速电机,6.卷缆盘,7.滑环装置,8.张紧电机,9.导线轮组合装置,901.主动轮,902.从动轮,903.导向轮,10.保护板,11.水平推进器,12.驱动器,13.垂直驱动器。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
37.在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
38.请参阅图1-图13,本实用新型提供一种技术方案:
39.本实用新型提供的具有收放缆功能的水下机器人,包括依次通过线缆连接的控制器、中继器1和水下机器人2,水下机器人2的底部安装有收放缆加装层,收放缆加装层与水下机器人2之间可拆卸固定连接,便于根据实际情况需要选择与其匹配的规格与长度,使用灵活方便,可使用范围广,另外还便于拆卸检测维修。安装收放缆加装层后,水下机器人2本身可实现存储缆的功能,具有可自动收放缆功能,使其收放缆过程更加灵活方便;与中继器1配合后,使其在水下拥有更大更广的作业范围,满足实际使用需求。
40.收放缆加装层为与水下机器人2相匹配的框架式结构,收放缆加装层的底部设有底板3,底板3整体结构为左右两端分别向上设有与水下机器人2底部相匹配的支撑框架4,其中间结构为由支撑框架4围成的凹槽结构,位于凹槽结构的底板3上安装有收放缆装置,此种结构设计有利于减小收放缆加装层的体积,不影响水下机器人的水下作业。
41.收放缆装置包括收放缆驱动减速电机5和横向放置的卷缆盘6,底板3上固定有滑环装置7,卷缆盘6套接在所述滑环装置7上;收放缆驱动减速电机5的输出轴与卷缆盘6上端的转轴连接,通过收放缆驱动减速电机5的输出轴转动,带动卷缆盘6在滑环装置7上相对转动。
42.滑环装置7包括配套使用的滑环定子和转子,滑环定子与底板3固定连接,转子与卷缆盘6固定连接,通过收放缆驱动减速电机5的输出轴转动,带动卷缆盘6在滑环定子上相对转动,实现电流及信号的持续输送。卷缆盘6的下部与滑环装置7的转子之间通过限位轴装置对其进行轴向限位固定。横向放置的卷缆盘6进一步减小收放缆加装层的高度、减小其整体体积、进一步减小其对水下机器人2的水下作业的影响;同时还可以根据实际需要的距离选择自动收放其与中继器1之间连接的线缆长度,与中继器1配合后,进一步扩大扩广其在水下能够达到的作业范围,满足实际使用需求,可使用范围广。支撑框架4中还安装与卷缆盘6相配合的线缆张紧装置,线缆张紧装置包括张紧电机8和导线轮组合装置9,导线轮组合装置9设置于两块保护板10之间的导线轮组合,其包括与张紧电机8输出轴相连接的主动轮901、从动轮902,以及分别与改变主动轮901、从动轮902上线缆传输方向相匹配的导向轮903。横向放置的卷缆盘6上的线缆横向传输通过线缆张紧装置的主动轮901以及与其上线
缆传输方向相匹配的导向轮903相配合将线缆的传输方向先顺时针改变90度传输后;再通过导向轮903传输到从动轮902上,在通过从动轮902与导向轮903相配合,将其线缆的传输方向先逆时针改变90度后传出,确保线缆在线缆张紧装置上的有效张紧传输。收放缆加装层内设置收放缆张紧机构后,可以使线缆回收或释放过程时,始终保证一直处于张紧状态,不积缆,不乱缠,确保水下机器人其水下作业的正常进行。
43.穿过主动轮901的张紧电机8输出轴上还连接设有离合器,进一步确保线缆张紧装置上输出线缆的张紧力度可控,且不会出现对线缆过度拉伸的情况出现。
44.水下机器人2可进出中继器1的电器仓内,且水下机器人2与中继器1的电器仓通过水密插头连接,水下机器人2由中继器1供电及传输信号。水下机器人2上设有与中继器1电连接的水平推进器11、垂直驱动器13和驱动器12。
45.水下机器人2可进出中继器1内部,且水下机器人2与中继器1通过水密插头连接,水下机器人2由中继器1供电及传输信号。中继器1上安装有用于观察水下机器人2出入其中情况的摄像头,可以通过控制器进一步精确控制水下机器人2进出中继器1的情况。水下机器人2上设有与中继器1电连接的水平推进器11、垂直推进器13、驱动器12及电气仓,可以通过控制器控制水下机器人2进出中继器1和进行水下作业运动,提供驱动力,以及控制器运动轨迹和方向,与本实用新型的水下机器人2的收放缆加装层配合使用,进一步提高其在水下的作业范围,且确保整个线缆收放过程中不积缆、不乱缠,使其收放缆更加灵活方便,可实现绕中继器1的大直径圆周范围内的作业,使其在水下拥有更大更广的作业范围与应用前景,实现大范围作业的收放缆方式,满足实际使用需求,可适用范围广。
46.具体使用过程如下:
47.如图11-图13所示,本实用新型的水下机器人2与中继器1搭配使用,将水下机器人2与中继器1同时释放到水下作业位置后,通过控制器启动水下机器人2,通过收放缆驱动减速电机5带动卷线盘6旋转,张紧电机8同步旋转,使线缆张紧装置上缆线的导线速度大于线缆从卷线盘6上的释放速度,最终完成卷线盘6上线缆的释放并保证线缆时刻张紧。
48.水下机器人2自身携带的水平推进器11与摄像照明系统等同时启动,水平推进器11和垂直驱动器13推进其从中继器1的电器仓内中出来进行水下作业工作;当作业完成后,再启动收放缆装置及线缆张紧装置,完成对线缆的回收,回收完成后,水下机器人2在水平推进器11、垂直驱动器13和驱动器12的作用下进入中继器1的电器仓内,最后跟随中继器1同步上岸。
49.综上,本实用新型的具有收放缆功能的水下机器人,结构简单巧妙,通过安装收放缆加装层后,使水下机器人2本身可实现存储缆的功能,可自动收放缆,实现线缆的张紧传输,且使线缆收放过程中不积缆、不乱缠,一方面使其收放缆更加灵活方便;另外,再与中继器1配合后,可实现绕中继器1的大直径圆周范围内的作业,使其在水下拥有更大更广的作业范围,实现大范围作业的收放缆方式,满足实际使用需求,可适用范围广。
50.以上仅是本实用新型的实施例而已,例如,水下机器人的种类以及其配置可以根据实际需要选择,均可以实现本实用新型的具有收放缆功能的水下机器人。
51.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范
围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。