一种现代机器人can总线协议转32路io模块
技术领域
1.can总线协议转32路io模块电路技术领域,具体为一种现代机器人can总线协议转32路io模块。
背景技术:
2.目前,随着现代信息化的发展,信息技术促使各个行业快速发展,工业企业对于信息化的要求也在逐渐的提高,工业信息化建设出现了飞速发展。机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器;同时它可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率质量,服务人类生活,扩大延伸人的活动及能力范围。与此同时,现场总线技术在工业领域的快速发展,现场总线系统中除了包括底层的现场设备系统,同时部署了大量的综合平台与主控设备,包括opc接口服务系统、各类机器人通讯接口、三菱与西门子等厂家plc等。工业企业部署的信息化系统、机器人、设备及各类综合平台产生大量的信息与数据,形成多个数据孤岛,无法有效为工业企业所用。大量的数据孤岛带来很多问题,包括无法有效实时了解机器人等设备的运行状况;机器人等设备故障时,无法及时报警及预警;数据孤岛多,不便于管理与集成;大量核心数据丢失,不能进行大数据分析。由于现代机器人can总线需要转换成cclink,然后通过cclink协议驱动io设备,增加了转换的成本。且现有的机器人can总线协议转32路io模块电路中,由于连接线路的正负极与can总线协议转32路io模块电路中的正负极接反,从而导致线路的损坏。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种现代机器人can总线协议转32路io模块,通过can总线直接驱动io设备,减少中间转换的过程,减少了成本,设置有输入线路,利用双向输入发光二极管,避免了由于线路的接错导致整个线路的损坏,且有利于拼接使用,从而提高了该模块线路的使用范围。
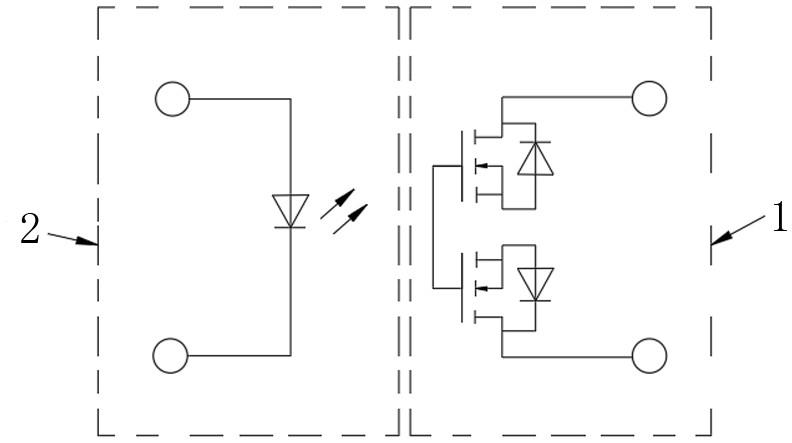
4.本实用新型解决技术问题所采用的技术方案是:一种现代机器人can总线协议转32路io模块电路,包括供电系统,can连接及转换系统,mcu主控、32路输出线路和32路输入线路,所述32路输出线路由mos联合管组成,且mos联合管是由两个相同的mos管并联而成,所述输出线路与输入线路相互对应连接。
5.作为进一步的改进,所述输入线路由双向输入发光二极管、限流电阻和自恢复保险丝组成。
6.作为一种优选,所述输入线路中的双向输入发光二极管分别与限流电阻和自恢复保险丝并联。
7.作为进一步的改进, 还包括数码显示系统、拨码地址系统和调试接口系统。
8.作为一种优选,所述供电系统包括5v供电系统和24v供电系统。
9.本实用新型输出负载功率设计成可选择式拼接方式,当用户现场输出需要驱动大
功率负载时,可相互拼接到32路主板上,实现超大功率输出,原有设计及程序都不需要任何改动,更加灵活,成本更低。
10.本实用新型的有益效果是: 通过can总线直接驱动io设备,减少中间转换的过程,减少了成本,设置有输入线路,且输入线路中包括有双向输入发光二极管,从而利用设置的双向输入发光二极管,避免了由于线路的接错导致整个线路的损坏,从而延长了该模块电路的使用寿命,且该电路模块,有利于拼接使用,从而提高了该模块线路的使用范围。
附图说明
11.图1为本实用新型实施例的线路连接图。
12.图2为本实用新型实施例的输入线路与用户系统的连接示意图。
13.图3为本实用新型实施例的输出线路与用户系统的连接示意图。
14.图4为本实用新型实施例的扩展接线示意图。
15.图5为本实用新型实施例中hhbd-bd580上的安装点位示意图。
16.图中:1、输出线路;2、输入线路。
17.下面结合附图对本实用新型做进一步说明。
具体实施方式
18.结合附图1-5,一种现代机器人can总线协议转32路io模块,包括供电系统,can连接及转换系统,mcu主控、32路输出线路1和32路输入线路2,32路输出线路1由mos联合管组成,且mos联合管是由两个相同的mos管并联而成;且32路输出线路1与32路输入线路2相互对应连接,32路输入线路2由双向输入发光二极管、限流电阻和自恢复保险丝组成,双向输入发光二极管分别与限流电阻和自恢复保险丝并联;32路输出线路1应用在24伏直流电路上;32路输入线路2应用在24伏直流电路上。通过机器人can接口与32路io模块相连接,通过差分线接收机器人的指令及反馈状态,同时可通过can扩展连接器级联多块32路io模块,can通讯模块具有抗干扰能力强,自纠错恢复等特点。
19.如图2所示,32路输入系统通过检测外围的输入信号号将信号状态反馈给mcu系统,mcu再将此信号转换为can信号传送给机器人系统。输入系统采用湿式光电隔离,输入正反接都不会损坏电路。
20.如图3所示,32路输出系统接收mcu出来收到的机器人can信号控制相应的输出电路打开或者关闭,输出系统具有双向输出功能并带输出保险丝。32路220v扩展输出可控制大电压大电流设备,采取可拼接式电路连接,需要时可以拼接使用降低成本。
21.本实用新型供电系统通过机器人控制系统接出后通过dc-dc转换给32路io模块系统供电,该系统具有输入电压范围广,功耗低等特点。mcu系统采用arm coretx系列,具有主频高,处理速度快等特点,同时自带can接口,减少外围设计。mcu负责将接收处理机器人发送的控制信息后控制相应的输入输出接口进行响应,同时将运行状态,错误提示等显示在数码管。数码管状态指示器通过mcu控制,mcu根据分析can信号及整体运行状态后将信息显示在数码管,方便使用人员通过数码管查看运行状态和报警信息。调试接口模块连接mcu调试器,可以通过此接口下载程序及对32路io模块进行在线仿真及测试。拨码地址设置系统与mcu相连,通过外部拨码开关实现级联时的板号识别以免造成通讯错误。
22.当使用本实用新型时,首先将该实用新型中的输入线路2与用户系统配合连接,且输入线路2与用户系统配合连接的电路图如图2,随后将该实用新型中的输出线路1与用户系统配合连接,且输出线路1与用户系统配合连接的电路图如图3,当该实用新型中的输出线路1和2分别与用户系统连接完成后,即可使用该装置,且该装置中设置有双向输入发光二极管,避免了在使用该装置的过中,由于接反线路导致线路的损坏,同时当用户现场io点数无法满足需求时,可通过32路io主板上can接口最多扩展成512点输入输出,同时拨动板号设置板号以便控制系统分辨出不同板号控制,具体接线示意图如图4所示。
23.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种现代机器人can总线协议转32路io模块,包括供电系统,can连接及转换系统,mcu主控、32路输出线路(1)和32路输入线路(2),其特征在于:所述32路输出线路(1)由mos联合管组成,且mos联合管是由两个相同的mos管并联而成,所述输出线路(1)与输入线路(2)相互对应连接。2.根据权利要求1所述的一种现代机器人can总线协议转32路io模块,其特征在于:所述输入线路(2)由双向输入发光二极管、限流电阻和自恢复保险丝组成。3.根据权利要求2所述的一种现代机器人can总线协议转32路io模块,其特征在于:所述输入线路(2)中的双向输入发光二极管分别与限流电阻和自恢复保险丝并联。4.根据权利要求1所述的一种现代机器人can总线协议转32路io模块,其特征在于: 还包括数码显示系统、拨码地址系统和调试接口系统。5.根据权利要求1所述的一种现代机器人can总线协议转32路io模块,其特征在于:所述供电系统包括5v供电系统和24v供电系统。
技术总结
本实用新型公开了一种一种现代机器人CAN总线协议转32路IO模块电路,包括供电系统,CAN连接及转换系统,MCU主控、32路输出线路和32路输入线路,所述32路输出线路由MOS联合管组成,且MOS联合管是由两个相同的MOS管并联而成,所述输出线路与输入线路相互对应连接。本实用新型通过CAN总线直接驱动IO设备,减少中间转换的过程,减少了成本,设置有输入线路,利用双向输入发光二极管,避免了由于线路的接错导致整个线路的损坏,且有利于拼接使用,从而提高了该模块线路的使用范围。该模块线路的使用范围。该模块线路的使用范围。
技术研发人员:张亮 黄耀南 金吕超 刘宪榜
受保护的技术使用者:海宁哈工现代机器人有限公司
技术研发日:2021.11.04
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。