1.本实用新型涉及医疗器械领域,特别涉及一种牵拉装置。
背景技术:
2.在进行乳腺癌的改良根治术的过程中,主刀医生分离皮瓣与皮下乳腺组织时通常需要助手手持多个直钳对手术切口处的皮瓣进行牵拉,其中,手术切口一般为梭形,手术切口的每一侧均需要多个直钳对皮瓣进行牵拉,对手术切口其中一侧的皮瓣进行牵拉时,需要助手将不同的手指分别伸入不同直钳的指环内以对不同的直钳持续施力,而且助手需要根据主刀医生的要求随时改变直钳的牵拉角度,导致助手的劳动强度较大,因此助手的手部很容易产生疲劳并发生颤抖,从而影响对皮瓣的牵拉效果,进而影响手术的效率和效果。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种牵拉装置,能够降低助手在手术过程中的劳动强度,从而有利于保证手术过程中对皮瓣的牵拉效果,进而有利于提高手术的效率和效果。
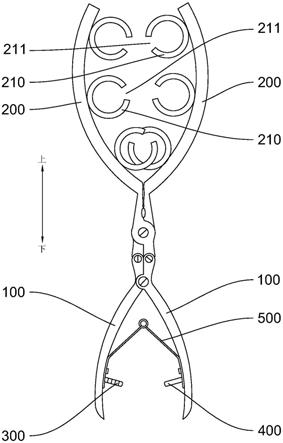
4.根据本实用新型实施例的牵拉装置,包括:两个主动臂,两个所述主动臂相互铰接,以使两个所述主动臂的下端相互靠近或远离时两个所述主动臂的上端能够相互远离或靠近;两个从动臂,其中一个所述从动臂设置于其中一个所述主动臂的上端,另一个所述从动臂设置于另一个所述主动臂的上端,两个所述从动臂上均设置有用于连接直钳的连接结构;定位结构,所述定位结构设置于两个所述主动臂之间,两个所述主动臂相互转动至所需角度后能够通过所述定位结构限制两个所述主动臂相互转动。
5.根据本实用新型实施例的牵拉装置,至少具有如下有益效果:使用时,将多个用于牵拉皮瓣的直钳通过所述连接结构连接于所述从动臂上,然后通过调整两个所述主动臂相互转动的角度以调整两个所述从动臂的打开角度,根据手术需求调整好两个所述从动臂的打开角度后,即两个所述主动臂相互转动至所需角度后,通过所述定位结构限制两个所述主动臂相互转动,此时助手握持两个所述主动臂的下部即可对皮瓣进行牵拉,其中,两个所述主动臂的下端相互靠近时,两个所述主动臂的上端能够相互远离以驱使两个所述从动臂打开,即两个所述从动臂打开时两个所述主动臂的下端相互靠近,使得助手仅需单手即可握持两个所述主动臂的下部。上述的牵拉装置能够降低助手在手术过程中的劳动强度,从而有利于保证手术过程中对皮瓣的牵拉效果,进而有利于提高手术的效率和效果。
6.根据本实用新型的一些实施例,所述连接结构包括多个间隔设置于所述从动臂上的呈圆形的卡环,所述卡环上设置有避让缺口。
7.根据本实用新型的一些实施例,所述连接结构包括多个间隔设置于所述从动臂上的呈矩形的卡环,所述卡环上设置有避让缺口。
8.根据本实用新型的一些实施例,所述连接结构包括多个间隔设置于所述从动臂上的t型连接件。
9.根据本实用新型的一些实施例,所述定位结构包括第一卡接部和第二卡接部,所述第一卡接部设置于其中一个所述主动臂上,所述第二卡接部设置于另一个所述主动臂上,所述第一卡接部上设置有多个第一斜齿,所述第二卡接部上设置有多个能够与所述第一斜齿配合卡接的第二斜齿。
10.根据本实用新型的一些实施例,两个所述主动臂之间设置有弹性复位件,所述弹性复位件能够提供使两个所述主动臂的下端相互远离的弹性力。
11.根据本实用新型的一些实施例,所述弹性复位件为扭簧,所述扭簧的其中一个扭臂连接于其中一个所述主动臂,所述扭簧的另一个扭臂连接于另一个所述主动臂。
12.根据本实用新型的一些实施例,两个所述从动臂错位设置。
13.根据本实用新型的一些实施例,两个所述从动臂相互铰接,以使两个所述从动臂的下端相互靠近或远离时两个所述从动臂的上端能够相互靠近或远离,其中一个所述从动臂的下端铰接于其中一个所述主动臂的上端,另一个所述从动臂的下端铰接于另一个所述主动臂的上端。
14.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
15.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
16.图1是本实用新型第一实施例两个从动臂处于闭合状态的结构示意图;
17.图2是本实用新型第一实施例两个从动臂处于打开状态的结构示意图;
18.图3是图2所示结构的俯视示意图;
19.图4是图2所示结构的分解示意图;
20.图5是本实用新型第二实施例两个从动臂处于打开状态的结构示意图;
21.图6是本实用新型第三实施例两个从动臂处于打开状态的结构示意图。
22.附图标记:
23.主动臂100、从动臂200、卡环210、避让缺口211、t型连接件220、连接部221、限位部222、第一卡接部300、第二卡接部400、弹性复位件500。
具体实施方式
24.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
25.在本实用新型的描述中,需要理解的是,如果涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.在本实用新型的描述中,如果出现若干、大于、小于、超过、以上、以下、以内等词,
其中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。
27.在本实用新型的描述中,如果出现第一、第二等词,只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
28.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
29.参照图1和图2,根据本实用新型实施例的牵拉装置,包括主动臂100、从动臂200和定位结构。
30.主动臂100的数量为两个,两个主动臂100相互铰接,以使两个主动臂100的下端相互靠近或远离时两个主动臂100的上端能够相互远离或靠近,即两个主动臂100的下端相互靠近时,两个主动臂100的上端相互远离,两个主动臂100的下端相互远离时,两个主动臂100的上端相互靠近,从动臂200的数量为两个,其中一个从动臂200设置于其中一个主动臂100的上端,另一个从动臂200设置于另一个主动臂100的上端,两个从动臂200上均设置有用于连接直钳的连接结构,定位结构设置于两个主动臂100之间,两个主动臂100相互转动至所需角度后能够通过定位结构限制两个主动臂100相互转动。
31.使用时,将多个用于牵拉皮瓣的直钳通过连接结构连接于从动臂200上,然后通过调整两个主动臂100相互转动的角度以调整两个从动臂200的打开角度,根据手术需求调整好两个从动臂200的打开角度后,即两个主动臂100相互转动至所需角度后,通过定位结构限制两个主动臂100相互转动,此时助手握持两个主动臂100的下部即可对皮瓣进行牵拉,其中,两个主动臂100的下端相互靠近时,两个主动臂100的上端能够相互远离以驱使两个从动臂200打开,即两个从动臂200打开时两个主动臂100的下端相互靠近,使得助手仅需单手即可握持两个主动臂100的下部。上述的牵拉装置能够降低助手在手术过程中的劳动强度,从而有利于保证手术过程中对皮瓣的牵拉效果,进而有利于提高手术的效率和效果。
32.参照图1、图2和图4,在其中的一些实施例中,连接结构包括多个间隔设置于从动臂200上的呈圆形的卡环210,卡环210上设置有避让缺口211,连接直钳时,首先通过避让缺口211将直钳的钳臂置于卡环210内,然后通过直钳的指环与卡环210相互配合以将直钳连接于从动臂200上。
33.参照图5,在其中的一些实施例中,卡环210呈矩形,当然,卡环还可以呈三角形或其他形状,在此不作限定。
34.参照图6,在其中的一些实施例中,连接结构包括多个间隔设置于从动臂200上的t型连接件220,具体的,t型连接件220包括连接部221和限位部222,连接部221的一端连接于从动臂200,限位部222设置于连接部221的另一端,连接直钳时,首先使限位部222穿过直钳的指环,然后通过直钳的指环与限位部222相互配合以将直钳连接于从动臂200上,其中,连接部221可以为硬质部件,例如杆件,也可以为柔性部件,例如钢丝绳,在此不作限定。
35.参照图1、图2和图4,在其中的一些实施例中,定位结构包括第一卡接部300和第二卡接部400,第一卡接部300设置于其中一个主动臂100上,第二卡接部400设置于另一个主动臂100上,第一卡接部300上设置有多个第一斜齿(图中未示出),第二卡接部400上设置有
多个能够与第一斜齿配合卡接的第二斜齿(图中未示出),其中,上述结构为本领域内的公知技术,在此不做赘述。
36.需要说明的是,在其中的一些实施例中,第一卡接部上设置有插接部,第二卡接部上设置有供插接部穿过的弧形通孔,插接部穿过弧形通孔的部分螺纹连接有紧固螺母,在此不作限定。
37.参照图1、图2和图4,在其中的一些实施例中,两个主动臂100之间设置有弹性复位件500,弹性复位件500能够提供使两个主动臂100的下端相互远离的弹性力,以便于助手根据手术需求调整两个从动臂200的打开角度。
38.参照图1、图2和图4,在其中的一些实施例中,弹性复位件500为扭簧,扭簧的其中一个扭臂连接于其中一个主动臂100,扭簧的另一个扭臂连接于另一个主动臂100。
39.需要说明的是,在其中的一些实施例中,弹性复位件也可以为压缩弹簧,在此不作限定。
40.参照图3,在其中的一些实施例中,两个从动臂200错位设置,能够避免两个从动臂200发生干涉,有利于增加两个从动臂200的开合范围。
41.参照图1、图2和图4,在其中的一些实施例中,两个从动臂200相互铰接,以使两个从动臂200的下端相互靠近或远离时两个从动臂200的上端能够相互靠近或远离,即两个从动臂200的下端相互靠近时,两个从动臂200的上端也相互靠近,两个从动臂200的下端相互远离时,两个从动臂200的上端也相互远离,其中一个从动臂200的下端铰接于其中一个主动臂100的上端,另一个从动臂200的下端铰接于另一个主动臂100的上端,其结构简单且易于实现。
42.需要说明的是,在其中的一些实施例中,从动臂200和主动臂100也可以是一体式结构,在此不作限定。
43.在本说明书的描述中,如果涉及到“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”以及“一些示例”等参考术语的描述,意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
44.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。