一种基于bp神经网络的探地雷达地下空洞目标识别方法
技术领域
1.本发明涉及雷达信号处理与目标识别领域,尤其涉及一种基于bp神经网络的探地雷达地下空洞目标识别方法。
背景技术:
2.随着我国经济的不断发展,城市化水平逐渐提高,城市交通压力也越来越大,探测和修复道路地下病害是道路养护的关键问题。地下空洞是最常见的一种道路病害,容易导致地面塌陷,不仅对城市交通造成严重的影响,而且会对人民的生命财产安全造成危害。因此,地下空洞的探测与识别对于保障城市道路安全具有重要意义。
3.探地雷达具有探测速度快、探测过程连续、分辨率高、操作方便、探测成本低、探测范围广及剖面图直观等优点,在道路地下空洞探测中得到越来越多的应用。传统的探地雷达剖面解释工作主要依赖于工作人员的经验,在判读过程中容易出错,且效率低,为了提高探测准确率和效率,需要研究目标的自动识别技术。
4.目前探地雷达目标识别方法主要包括机器学习方法(支持向量机和神经网络)和深度学习方法(卷积神经网络)。机器学习方法需要先提取特征后再进行识别,网络结构简单,运行速度较快;深度学习方法直接利用深度网络提取特征,网络结构复杂,且需要大量标记样本训练,识别速度较慢。因此,从识别效率来看,机器学习方法更具优势。在机器学习方法中,从特征提取的角度看,主要可分为基于a-scan信号(单道信号)和b-scan图像的两类。基于a-scan信号的特征提取方法是从探地雷达的一维数据中提取特征,计算相对简单;基于b-scan图像的特征提取方法主要是从二维图像中提取特征,计算相对复杂。因此,基于a-scan信号的特征提取方法具有更小的计算量。
5.在探地雷达空洞目标识别中,基于a-scan信号特征提取的识别方法可分为两类:一类是提取一道a-scan信号的整体特征,利用分类器识别该道信号是否含有空洞目标,该方法识别效率高,但是只能识别出目标的水平方向位置,用于对空洞的初步判断;一类是提取a-scan分段信号特征,利用分类器识别该段信号是否为空洞目标回波,该方法可识别出目标位置,有利用对空洞的判断,但是对于整个b-scan图像,分段信号数量较大,特征提取计算量也较大,影响了识别效率。在实际道路地下空洞探测中,包含空洞目标的a-scan信号数量较少,对所有a-scan分段信号识别并无必要,因此,如何减少无效分段信号的识别,提高识别效率,对于提高探地雷达空洞探测性能具有重要意义。
技术实现要素:
6.为了解决上述问题,本发明提供了一种基于bp神经网络的探地雷达地下空洞目标识别方法,该探地雷达地下空洞目标识别方法采用鲁棒主成分分析方法对探地雷达b-scan图像进行分解,以更好地区分杂波和目标成分,可提高杂波抑制效果;提取时域、频域和小波域上的多维组合特征,可更好反映目标信号和非目标信号的差异;利用bp神经网络对a-scan信号进行先整体识别、后分段识别可降低计算量,通过整体识别和分段识别相结合,在
保证目标识别准确率的同时,可有效提高识别效率,适用于道路地下空洞目标的检测与定位。所述探地雷达地下空洞目标识别方法主要包括以下步骤:
7.s1:获取探地雷达b-scan图像,利用鲁棒主成分分析法对对探地雷达b-scan图像进行处理,以抑制杂波信号;
8.s2:对处理后的b-scan图像中的每一道a-scan信号进行特征提取,分别得到时域、频域和小波域特征;
9.s3:利用bp神经网络对抑制杂波后的b-scan图像中的每一道a-scan信号进行整体识别,得到目标水平方向区域;
10.s4:对所述目标水平方向区域内a-scan信号进行分段,提取每段信号的时域、频域和小波域特征;
11.s5:根据步骤s4得到的每段信号的时域、频域和小波域特征,利用bp神经网络对a-scan中分段信号进行识别,得到该道a-scan信号内目标垂直方向区域;
12.s6:根据所述目标水平方向区域和垂直方向区域,确定目标位置。
13.进一步地,采用鲁棒主成分分析法对探地雷达b-scan图像进行杂波信号抑制的步骤如下:
14.(1)获取探地雷达b-scan图像x∈rm×n,其中n为b-scan图像中的a-scan信号的道数,m为每道a-scan信号的的采样点数,x=[x1(m),x2(m),
…
,xn(m)],xi(m)=(xi(1),xi(2),
…
,xi(m))
t
为第i道a-scan信号,m表示每道a-scan信号内的样点序号,1≤m≤m;
[0015]
(2)对于探地雷达b-scan图像x中每一道a-scan信号进行处理,以去除直流偏移,该处理过程为:
[0016][0017]
其中,表示探地雷达b-scan图像x中每一道a-scan信号数据的均值。
[0018]
(3)采用鲁棒主成分分析法对去除直流偏移后的探地雷达b-scan图像进行处理,得到低秩矩阵g和稀疏矩阵s,选择稀疏矩阵s作为目标回波信号,得到杂波抑制后的b-scan图像x1。
[0019]
进一步地,步骤s2中得到的时域、频域和小波域特征分别如下:
[0020]
(1)时域特征
[0021]
时域特征包括3个特征:均值meani、标准差stdi和均方根值rmsi,计算过程分别如下:
[0022][0023]
[0024][0025]
其中,x1i(m)为杂波抑制后的b-scan图像中的第i道a-scan信号数据;
[0026]
(2)频域特征
[0027]
频域特征为信号能量谱,其计算式如下:
[0028][0029]
其中,k1为频点序号;
[0030]
(3)小波域特征
[0031]
小波域特征为小波包能量谱ti,该小波包能量谱定义为归一化的小波包节点能量:
[0032][0033]
小波包节点能量e
i,l,j
为:
[0034][0035]
其中,i为道序号,为x1i(m)的小波包分解系数,l为分解的层数,j为频段,k2为分解系数的长度。
[0036]
进一步地,获取目标水平方向区域的步骤如下:
[0037]
(1)从抑制杂波后的b-scan图像中分别选取多道含空洞目标和不含空洞目标的a-scan信号,提取特征构建样本集,其中每个样本为23维的特征向量;
[0038]
(2)从所述样本集选取部分数据作为训练集,利用训练集对bp神经网络进行训练,得到网络模型net1,利用net1对样本集进行识别;
[0039]
(3)对于识别为含目标的k个a-scan信号根据其水平位置ik,得到目标水平方向初始区域h1={ik,1≤k≤k};
[0040]
(4)对目标水平方向初始区域h1进行融合和删除处理,具体过程如下:
[0041]
1)融合处理
[0042]
假设和为相邻的两个含目标a-scan信号,如果其道差1<|i
k-i
k 1
|≤id,则将这相邻a-scan信号之间所有a-scan信号x1i(m)都判断为含目标信号,ik≤i≤i
k 1
,由此得到p个目标水平方向区域分别为[i
pl i
ph
],1《p《k,1≤p≤p,其中i
pl
为第p个目标的起始道号,i
ph
第p个目标的结束道号;
[0043]
2)删除处理
[0044]
对于融合处理后的第p个目标,其水平方向宽度w
p
=(i
ph-i
pl
),如果w
p
小于门限值
wt,则将该目标判断为假目标,并将该目标对应的区域从目标水平方向区域中删除,得到最终的目标水平方向区域为h2。
[0045]
进一步地,对目标水平方向区域内a-scan信号进行分段,并提取每段信号的时域、频域和小波域特征的具体步骤如下:
[0046]
(1)将目标水平方向区域的所有a-scan信号进行分段,每段长度为l1,则第i道a-scan信号x1i(m)中第lk段信号为:
[0047]
x2
i,lk
(r)=x1i((lk-1)*l1 r),1≤lk≤kl,1≤r≤l1
ꢀꢀꢀ
(8)
[0048]
其中,i为道序号,lk为段序号,r为段内信号点序号,分段数kl=floor(m/l1),floor(
·
)表示向下取整。
[0049]
(2)提取每段信号的时域、频域和小波域特征的过程如下:
[0050]
1)时域特征
[0051]
时域特征包括3个特征:均值mean
i,lk
、标准差std
i,lk
和均方根值rms
i,lk
,计算式分别如下:
[0052][0053][0054][0055]
其中,x2
i,lk
(r)为分段处理后的第i道第lk段a-scan信号数据;
[0056]
(2)频域特征
[0057]
频域特征为信号能量谱,其计算式如下:
[0058][0059]
其中,k3为频点序号;
[0060]
(3)小波域特征
[0061]
小波域特征为小波包能量谱,其定义为归一化的小波包节点能量:
[0062][0063]
小波包节点能量为:
[0064][0065]
其中,为x2
i,lk
(r)的小波包分解系数,l为分解的层数,j为频段,k4为分解
系数的长度。
[0066]
进一步地,获取a-scan信号内目标垂直方向区域的步骤如下:
[0067]
(1)从目标水平方向区域内a-scan信号中分别选取多段含有空洞目标和不含空洞目标的分段信号,提取特征构建样本集,其中每个样本为19维的特征向量;
[0068]
(2)从样本集选取部分数据作为训练集,利用训练集对bp神经网络进行训练,得到网络模型net2,利用net2对样本集进行识别;
[0069]
(3)对于识别为含目标的j个分段信号由其所在道号i及其在该道中的段号得到第i道a-scan信号中目标垂直方向区域坐标为
[0070]
进一步地,对识别为含目标的分段信号,在其对应的垂直方向和水平方向区域进行标记,得到目标的位置。
[0071]
本发明提供的技术方案带来的有益效果是:
[0072]
1.利用鲁棒主成分分析方法对探地雷达b-scan图像进行分解,可充分利用图像中目标分量的稀疏特性和杂波分量的低秩特性,更好实现目标和杂波的分离;
[0073]
2.选择a-scan信号时域统计特征、频域能量谱和小波域小波包能量谱作为特征,可充分利用不同类型特征之间的互补性,更好区分目标和非目标;
[0074]
3.利用bp神经网络首先对a-scan信号进行整体识别,可快速识别出目标水平方向区域;然后对目标水平方向区域内a-scan信号进行分段识别,可准确识别出目标位置,避免了大量非目标区域的计算,提高了识别效率。
附图说明
[0075]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0076]
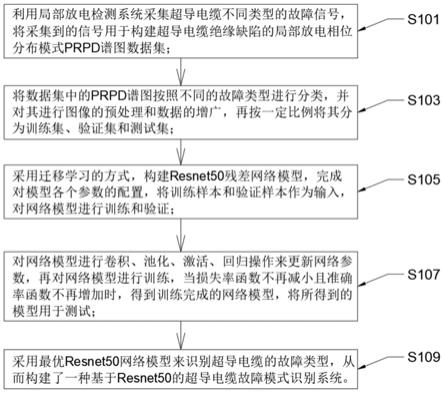
图1是本发明实施例中一种基于bp神经网络的探地雷达地下空洞目标识别方法的流程图。
[0077]
图2是本发明实施例中探地雷达原始b-scan图像的示意图。
[0078]
图3是本发明实施例中利用鲁棒主成分分析方法抑制杂波后的b-scan图像的示意图。
[0079]
图4是本发明实施例中识别出的目标水平方向初始区域的示意图。
[0080]
图5是本发明实施例中经过融合处理和删除处理后的目标水平方向区域的示意图。
[0081]
图6是本发明实施例中识别出的目标位置的示意图。
具体实施方式
[0082]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0083]
本发明的实施例提供了一种基于bp神经网络的探地雷达地下空洞目标识别方法。
[0084]
请参考图1,图1是本发明实施例中一种基于bp神经网络的探地雷达地下空洞目标
识别方法的流程图,具体包括如下步骤:
[0085]
1.利用鲁棒主成分分析法对探地雷达b-scan图像进行处理,以抑制杂波信号;具体步骤如下:
[0086]
(1)获取探地雷达b-scan图像x∈rm×n,其中n为道数,m为每道数据的采样点数,x=[x1(m),x2(m),
…
,xn(m)],xi(m)=(xi(1),xi(2),
…
,xi(m))
t
为第i道a-scan信号,m表示每道a-scan信号数据内样点序号,1≤m≤m;
[0087]
(2)对于探地雷达b-scan图像x中每一道a-scan信号进行处理,以去除直流偏移,该处理过程为:
[0088][0089]
其中,表示探地雷达b-scan图像x中每一道a-scan信号数据的均值。
[0090]
(3)采用鲁棒主成分分析法对去除直流偏移后的探地雷达b-scan图像进行处理,得到低秩矩阵g和稀疏矩阵s,选择稀疏矩阵s作为目标回波信号,得到杂波抑制后的b-scan图像x1。
[0091]
2.对处理后的b-scan图像中的每一道a-scan信号进行特征提取,分别得到如下所示的时域、频域和小波域特征:
[0092]
(1)时域特征
[0093]
时域特征包括3个特征:均值meani、标准差stdi和均方根值rmsi,计算过程分别如下:
[0094][0095][0096][0097]
(2)频域特征
[0098]
频域特征为信号能量谱,其计算式如下:
[0099][0100]
其中k1为频点序号,本实施例中选择前12个奇数频点(k1=1,3,...,23)的能量谱作为频域特征。
[0101]
(3)小波域特征
[0102]
小波域特征为小波包能量谱ti,将该小波包能量谱定义为归一化的小波包节点能量:
[0103][0104]
小波包节点能量e
i,l,j
为:
[0105][0106]
其中,i为道序号,为x1i(m)的小波包分解系数,l为分解的层数,j为频段,k2为分解系数的长度。
[0107]
本实施例中,选择分解层数l为3,由此得到小波域特征维数为8。
[0108]
综合上面三大类特征,得到x1i(m)的特征向量维数为23。
[0109]
3.利用bp神经网络对抑制杂波后的b-scan图像中的a-scan信号进行整体识别,得到目标水平方向区域;获取目标水平方向区域的步骤如下:
[0110]
(1)从抑制杂波后的b-scan图像中分别选取多道含空洞目标和不含空洞目标的a-scan信号,提取特征构建样本集,其中每个样本为23维的特征向量,分别为:时域3个,频域12个和小波域8个;
[0111]
(2)从所述样本集选取部分数据作为训练集,利用训练集对bp神经网络进行训练,得到网络模型net1,利用net1对样本集进行识别;
[0112]
(3)对于识别为含目标的k个a-scan信号根据其水平位置ik,得到目标水平方向初始区域h1={ik,1≤k≤k};
[0113]
(4)对目标水平方向初始区域h1进行融合和删除处理,具体过程如下:
[0114]
1)融合处理
[0115]
假设和为相邻的两个含目标a-scan信号,如果其道差1<|i
k-i
k 1
|≤id,则将这相邻a-scan信号之间所有a-scan信号x1i(m)都判断为含目标信号,ik≤i≤i
k 1
,由此得到p个目标水平方向区域分别为[i
pl i
ph
],1《p《k,1≤p≤p,其中i
pl
为第p个目标的起始道号,i
ph
第p个目标的结束道号;
[0116]
2)删除处理
[0117]
对于融合处理后的第p个目标,其水平方向宽度w
p
=(i
ph-i
pl
),如果w
p
小于门限值wt,则将该目标判断为假目标,并将该目标对应的区域从目标水平方向区域中删除,得到最终的目标水平方向区域为h2。
[0118]
4.对目标水平方向区域内a-scan信号进行分段,提取每段信号的时域、频域和小波域特征,具体步骤如下:
[0119]
(1)将目标水平方向区域的所有a-scan信号进行分段,每段长度为l1,则第i道a-scan信号x1i(m)中第lk段信号为:
[0120]
x2
i,lk
(r)=x1i((lk-1)*l1 r),1≤lk≤kl,1≤r≤l1
ꢀꢀꢀ
(8)
[0121]
其中,i为道序号,lk为段序号,r为段内信号点序号,分段数kl=floor(m/l1),floor(
·
)表示向下取整;
[0122]
(2)提取每段信号的时域、频域和小波域特征的过程如下:
[0123]
1)时域特征
[0124]
时域特征包括3个特征:均值mean
i,lk
、标准差std
i,lk
和均方根值rms
i,lk
,计算式分别如下:
[0125][0126][0127][0128]
其中,x2
i,lk
(r)为分段处理后的第i道第lk段a-scan信号数据;
[0129]
(2)频域特征
[0130]
频域特征为信号能量谱,其计算式如下:
[0131][0132]
其中,k3为频点序号,本实施例中选择前8个频点(k3=1,2,...,8)的能量谱作为频域特征;
[0133]
(3)小波域特征
[0134]
小波域特征为小波包能量谱t
i,lk
,该小波包能量谱定义为归一化的小波包节点能量:
[0135][0136]
小波包节点能量为:
[0137][0138]
其中,为x2
i,lk
(r)的小波包分解系数,l为分解的层数,j为频段,k4为分解系数的长度。
[0139]
本实施例中,选择分解层数l为3,由此得到小波域特征维数为8。综合上面三大类特征,得到分段a-scan信号的特征向量维数为19。
[0140]
5.根据步骤4得到的每段信号的时域、频域和小波域特征,利用bp神经网络对a-scan中分段信号进行识别,得到该道a-scan信号内目标垂直方向区域,具体步骤如下:
[0141]
(1)从目标水平方向区域内a-scan信号中分别选取多段含有空洞目标和不含空洞目标的分段信号,提取特征构建样本集,其中每个样本为19维的特征向量,分别为:时域3
个,频域8个和小波域8个;
[0142]
(2)从样本集选取部分数据作为训练集,利用训练集对bp神经网络进行训练,得到网络模型net2,利用net2对样本集进行识别;
[0143]
(3)对于识别为含目标的j个分段信号由其所在道号i及其在该道中的段号得到第i道a-scan信号中目标垂直方向区域坐标为
[0144]
6.根据目标水平方向区域和垂直方向区域,对识别为含目标的分段信号,在其对应的垂直方向和水平方向区域进行标记,得到目标的位置。
[0145]
结合图1,以图2所示的探地雷达原始b-scan图像为例来说明本发明实施例的目标识别方法,包括如下步骤:
[0146]
1.输入探地雷达原始b-scan图像,如图2所示,包含551道a-scan信号,每道数据有512个采样点;
[0147]
2.利用鲁棒主成分分析法抑制原始b-scan图像中杂波,得到抑制杂波后图像,如图3所示;
[0148]
3.对于每道a-scan信号,提取时域、频域和小波域特征,构建23维特征向量;
[0149]
4.构建的bp神经网络模型net1为3层,结构为23-10-2,利用多个包含目标和不含目标a-scan信号的特征向量构建样本集对net1进行训练,利用训练好的网络对样本集进行测试,得到目标水平方向初始区域h1,如图4所示,识别准确率为82.6%;
[0150]
5.对识别的目标水平方向初始区域h1进行融合处理和删除处理,得到最终的目标水平方向区域为h2,如图5所示,识别准确率为97.5%;
[0151]
6.对目标水平方向区域h2内的a-scan信号进行分段,提取分段信号的时域、频域和小波域特征,构建19维特征向量;
[0152]
7.构建的bp神经网络模型net2为3层,结构为19-10-2,利用多个包含目标和不含目标a-scan分段信号的特征向量构建样本集对net2进行训练,利用训练好的网络对样本集进行测试,得到每道a-scan信号中目标垂直方向区域v1;
[0153]
8.对于识别为含目标的分段信号,在其对应的垂直方向和水平方向区域进行标记,得到目标的位置,如图6所示,识别准确率为95.5%。
[0154]
相较于现有技术,本发明的有益效果是:
[0155]
1.利用鲁棒主成分分析方法对探地雷达b-scan图像进行分解,可充分利用图像中目标分量的稀疏特性和杂波分量的低秩特性,更好实现目标和杂波的分离;
[0156]
2.选择a-scan信号时域统计特征、频域能量谱和小波域小波包能量谱作为特征,可充分利用不同类型特征之间的互补性,更好区分目标和非目标;
[0157]
3.利用bp神经网络首先对a-scan信号进行整体识别,可快速识别出目标水平方向区域;然后对目标水平方向区域内a-scan信号进行分段识别,可准确识别出目标位置,避免了大量非目标区域的计算,提高了识别效率。
[0158]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。