1.本发明属于铁路勘测技术领域,具体涉及基于航空遥感影像的铁路轨道及中线提取方法。
背景技术:
2.既有轨道线路重建、复测、检核技术,是对铁路设计与施工的符合技术,也是对既有线路设计线路数据的重建复盘技术,甚至可以作为地基稳定性检测技术,在铁路建设与运营管理中具有重要作用。传统的方法为人工线路测量或者半自动扫描方式,通过全站仪、激光扫描仪等设备,然而使用全站仪的方法只能测定线路诸元参数,恢复出设计几何节点与曲率,采样不足不能真实表达既有铁路的空间形态,线性吻合度比较低;为了解决这种采样不足带来的问题,后续方法使用激光扫描仪的方式,通过pos系统与沿线靶标的控制,可以实现2cm的空间位置精度,但这种方法不仅需要昂贵的激光扫描设备,要求百万次/秒以上的高精度测量效率,而且还需占据正常铁路行驶时空,影响正常铁路运营等经济活动。
3.[专利cn110728689a]发明公开了一种基于激光点云数据的既有铁路中线提取方法,利用二值化结果计算出铁路中线,但此方法需要高质量的点云,依赖点云滤波和点云反射强度的效果,先验知识约束比较严重;[专利cn105844995a]提出一种车载lidar的铁路线路运营维护测量方法,依赖对轨面数据分类的效果,而且需要单独处理岔心结构复杂的构件,才能提取形成线路要素信息表,完成铁路平纵面图。
技术实现要素:
[0004]
为了弥补现有技术的不足,本发明提供基于航空遥感影像的铁路轨道及中线提取方法,解决了现有既有铁路轨道及中线提取技术中存在高效性与经济性不能兼具、高精度及可靠性与低成本不可兼得的问题。
[0005]
为了达到上述目的,本发明所采用的技术方案为:
[0006]
基于航空遥感影像的铁路轨道及中线提取方法,包括如下步骤:
[0007]
步骤一:根据铁路走向设计像控点分布,所述像控点在铁路线路两边成对布设;
[0008]
步骤二:获取所述像控点的航空覆盖影像,所述航空覆盖影像的重叠度应大于等于3度重叠要求;
[0009]
步骤三:在铁路沿线测区范围外布设外扩2个基线长度的航线;
[0010]
步骤四:对所述航空覆盖影像进行空三解算,获得每一张航空覆盖影像在物方空间的三维姿态信息与相机畸变参数模型系数;
[0011]
步骤五:使用线段提取算法,提取每一张航空覆盖影像的线段信息,作为后期加速半自动化轨线预测提取的预测候选值;
[0012]
步骤六:通过步骤四获得具有空间关系的影像对,从所述影像对中半自动跟踪绘制出同名轨线,然后通过最小二乘同名轨线拟合的方式恢复出空间真实线路的空间位置信息;
[0013]
步骤七:轨道中线提取;
[0014]
步骤八:结合设计标准参数,构建铁路线路信息数据库。
[0015]
具体地,所述轨道中线提取包括如下步骤:
[0016]
步骤一:根据步骤六获得的同名轨线位置及空间真实线路的空间位置信息,获取轨线的左右轨道参考线;
[0017]
步骤二:根据所述左右轨道参考线,通过法向量相交的原理,计算出轨道中线的采样线段;
[0018]
步骤三:根据所述采样线段直接拟合出轨线诸元参数,实现轨面信息的重建。
[0019]
本发明的有益效果:
[0020]
1)本发明采用非接触式的空间位置采样方法,无须使用轨道车进行,在数据采集过程中不影响正常铁路运营活动,在铁路既有线路复测中具有重要意义;
[0021]
2)本发明以摄影测量技术为核心,其空间测量精度与航空测图精度保持一致,满足1:500的线路测图精度,且可以通过提升其分辨率提升其精度至毫米级别;
[0022]
3)本发明具有高效性、成本低、作业安全性高的特点,无须复杂的参数设置与后续的后期处理,精度可控,有利于降低铁路运营维护中的资本投入;
[0023]
4)本发明无须具有先验知识的人员进行阈值设置,分类、过滤掉多余的地面点信息,也无须投入大量的人力成本投入,即可重建获取得到铁路轨道空间位置信息和设计原诸元参数。
附图说明
[0024]
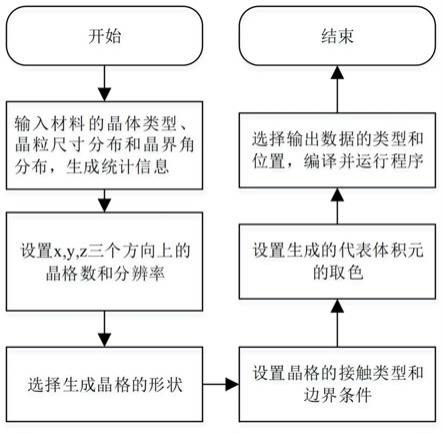
图1为本发明操作流程图;
[0025]
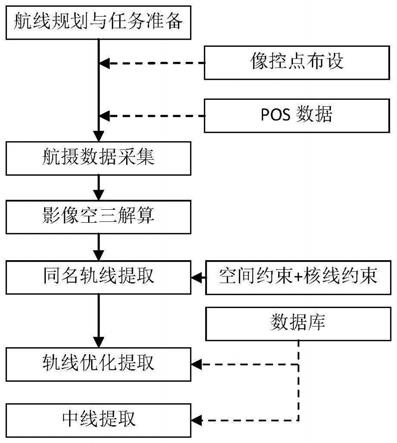
图2为铁路沿线像控点布设图;
[0026]
图3是航摄同名线提取原理图;
[0027]
图4是铁路轨线同名线跟踪图。
具体实施方式
[0028]
下面结合具体实施方式对本发明进行详细的说明。
[0029]
本发明利用当前成熟且性价比高、精度可靠的无人机航摄遥感方式,高效地实现一种非接触式的线路重建方法,不仅可以检核线路施工精度,而且还可以作为一种可靠的既有铁路中线重建手段。如图1所示,本发明具体包括如下步骤:
[0030]
步骤一:根据铁路走向设计像控点分布,像控点分布密度、影像的分辨率、相机的参数需根据项目成果精度要求而设定;如图2所示,像控点在铁路线路两边成对布设;
[0031]
步骤二:获取像控点的航空覆盖影像,航空覆盖影像的重叠度应大于等于3度重叠要求;
[0032]
步骤三:为了满足空三解算的稳定性需要在铁路沿线测区范围外布设外扩2个基线长度的航线,还需以构架航线的设计思路增加长带状测区的稳定性;
[0033]
步骤四:对航空覆盖影像进行空三解算,根据获取的航空影像、pos信息、像控点信息,解算出每一张影像在物方空间的三维姿态信息与相机畸变参数模型系数;
[0034]
步骤五:使用线段提取算法,提取每一张航空覆盖影像的线段信息,作为后期加速
半自动化轨线预测提取的预测候选值;
[0035]
步骤六:通过步骤四获得具有空间关系的影像对,从影像对中半自动跟踪绘制出同名轨线,然后通过最小二乘同名轨线拟合的方式恢复出空间真实线路的空间位置信息;
[0036]
1)由于同名轨线在不同影像中存在核线约束关系,同名轨线必然在不同影像中存在核线限制关系,如图3所示,此关系为计算机视觉中的基本矩阵f约束关系,具体呈现方式如公式(1)所示,其中x1、x2为左右影像中的同名点,如轨线中的同名点,基本矩阵f可通过左右立体影像的内参数k和外参数m=[r t]获得,如公式(2)所示。
[0037][0038][0039]
2)除了立体像对中存在的空间几何约束外,在单幅影像中轨道线也呈现极强的平滑性和鲜明性的特征,因此影像灰度跟踪轨迹算法为轨线轨迹的另外一种一维约束;
[0040]
3)结合1)和2),如图4所示,利用一维灰度轨迹和空间基本矩阵的约束,实现沿轨迹线的半自动更新;
[0041]
4)由于轨道自身的规则特性,因此在1)中的空间约束可以看作为线段约束,左影像在右影像中的核线方程为接着就可以在右影像中选择最近邻域的边缘线段;
[0042]
5)空间轨线拟合,由于经过1)~4)步骤的半自动轨线绘制,在每张影像中都提取出像素线段,只需分段进行空间多曲面空间交会拟合出最佳符合线就可,另外还需考虑整体线段的平整性、光滑性约束,需要在拟合函数中增一阶导数平滑约束,具体拟合能量函数如下公式2所示,其中ci为影像i中同名线段对应的空间曲面,公式(3)中第一项公式为拟合相交公式,第二项公式为确保拟合出的空间曲线具有平滑的特性;
[0043][0044]
步骤七:轨道中线提取
[0045]
1)根据步骤六获得的同名轨线位置及空间真实线路的空间位置信息,获取轨线的左右轨道参考线;
[0046]
2)根据所述左右轨道参考线,通过法向量相交的原理,寻找同时垂直于左右过道面参考线的法线,获取左右相交点的中点,即为铁路中线的采样点;
[0047]
3)根据所述采样线段直接拟合出轨线诸元参数,实现轨面信息的重建。
[0048]
获取的采样点,都是对现实轨面的超采样表达,存在大量的冗余信息,无法直接存储到相应的设计数据库中,因此还需要对采样数据在其轴向方向进行合并;消除冗余数据的依据就是相邻采样点、线是否共轴;
[0049]
步骤八:结合设计标准参数,如轨道内轨距、轨高、腰厚等,录入轨线参数,构建铁路线路信息数据库。
[0050]
应用实例如下:
[0051]
如丘陵区某段运营铁路,长度约10km,南北走向,沿途既有桥梁路基也有普通路基段,通过收集和前期的初勘,直接利用已经存在的cpi控制网作为已知控制网,然后建立区
域像控点,平面绝对精度为优于2cm,垂直绝对精度为优于3cm,像控点沿铁路线路两侧成对布设,平均8个基线长度布设一对像控点,约200米左右一对。航空影像数据质量要求清晰、色彩饱和,地面分辨率设置为优于1cm。通过空三解算获得高精度影像空间真实姿态数据,相对精度毫米级别,轨面绝对平面位置中误差可以达到≤2cm,绝对高程位置中误差可以达到≤3cm,如提高地面分辨率和控制点精度可以达到毫米级别的测量精度。将解算精度与既测铁路数据对比,精度满足复测要求。
[0052]
在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0053]
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。