技术特征:
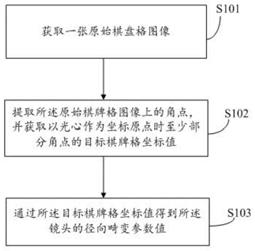
1.一种获取径向畸变参数值的方法,其特征在于,所述方法包括:获取一张原始棋盘格图像,其中,所述原始棋盘格图像是通过镜头对棋盘格图案进行拍摄得到的;提取所述原始棋盘格图像上的角点,并获取以光心作为坐标原点时至少部分角点的目标棋盘格坐标值;通过所述目标棋盘格坐标值得到所述镜头的径向畸变参数值。2.如权利要求1所述的方法,其特征在于,所述提取所述原始棋盘格图像上的角点,包括:根据角点提取核从所述原始棋盘格图像上提取多个极大值角点和多个极小值角点,其中,所述角点提取核用于表征所述棋盘格图案上角点邻域内像素点的亮度分布规律;所述获取以光心作为坐标原点时至少部分角点的目标棋盘格坐标值,包括:获取以光心作为坐标原点时,至少部分极大值角点和至少部分极小值角点的目标棋盘格坐标值。3.如权利要求2所述的方法,其特征在于,所述获取以光心作为坐标原点时至少部分极大值角点和至少部分极小值角点的目标棋盘格坐标值,包括:根据相邻的任一极大值角点和任一极小值角点获得一条候选线段,并将所有不同候选线段划分成多组线段序列,其中,一组线段序列包括的所有不同候选线段之间首尾相连可形成长线段;针对至少部分线段序列,根据各线段序列中候选线段的方向确定极大值角点和极小值角点的初始棋盘格坐标值,得到目标极大值角点的初始棋盘格坐标值和目标极小值角点的初始棋盘格坐标值,其中,所述初始棋盘格坐标值是在初始棋盘格坐标系下的坐标值;将初始棋盘格坐标系的坐标原点与所述光心对准后,根据所述目标极大值角点的初始棋盘格坐标值得到所述目标极大值角点的目标棋盘格坐标,并根据所述目标极小值角点的初始棋盘格坐标值得到所述目标极小值角点的目标棋盘格坐标值。4.如权利要求1-3任一项所述的方法,其特征在于,所述通过所述目标棋盘格坐标值得到所述镜头的径向畸变参数值,包括:根据所述目标棋盘格坐标值确定所述目标极大值角点或者所述目标极小值角点的像高,并根据所述像高进行多项式拟合得到所述径向畸变参数值。5.如权利要求2-4任一项所述的方法,其特征在于,所述根据角点提取核从所述原始棋盘格图像上提取多个极大值角点和多个极小值角点,包括:将所述角点提取核与所述原始棋盘格图像对应的矩阵进行卷积操作,得到多个局部极大值和局部极小值;在所述原始棋盘格图像上,根据各所述局部极大值所在的像素位置得到多个极大值像素位置,并根据所述局部极小值所在的像素位置得到多个极小值像素位置;将所述原始棋盘格图像上与所述多个极大值像素位置分别对应的像素点确认为所述多个极大值角点,并将所述原始棋盘格图像与所述多个极小值像素位置分别对应的像素点确认为所述多个极小值角点。6.如权利要求2-5任一项所述的方法,其特征在于,所述角点提取核对应的公式如下:
其中,x0=x cosθ-y sinθ,y0=x sinθ y cosθ,a表征留空宽度值,n表征所述原始棋盘格图像上的一个方格边长所占据的像素个数,(x0,y0)是坐标(x,y)顺时针旋转θ后得到的坐标。7.如权利要求3-6任一项所述的方法,其特征在于,在所述根据相邻的任一极大值角点和任一极小值角点得到一条候选线段之前,所述方法还包括:从所述原始棋盘格图像,获取所述多个极大值角点和所述多个极小值角点的像素坐标值;根据所述像素坐标值确定各极大值角点和各极小值角点之间的像素距离;根据所述像素距离为每个极大值角点选择一个或多个候选的相邻极小值角点作为所述每个极大值角点的候选邻居,并根据所述像素距离为每个极小值角点选择一个或多个候选的相邻极大值角点作为所述每个极小值角点的候选邻居;将确认为互为候选邻居的所述任一极大值角点和所述任一极小值角点记录为所述候选线段。8.如权利要求3-7任一项所述的方法,其特征在于,所述将所有不同候选线段划分成多组线段序列,包括:根据损失函数将多条不同候选线段划分在一组线段序列中,其中,所述损失函数用于确认各组线段序列包括的所有候选线段属于棋盘格里的同一行或同一列。9.如权利要求3-8任一项所述的方法,其特征在于,所述候选线段包括第一候选线段,其中,所述将所有不同候选线段划分成多组线段序列,包括:在与所述第一候选线段相邻的候选线段中,选择与所述第一候选线段的方向夹角最小的第二候选线段组成待扩充的线段序列s=(第一候选线段,第二候选线段);重复执行如下过程m次,直至第m 1次扩充后的得到的各损失函数的值均都大于序列损失阈值,则结束扩充并将第m次扩充得到的多条候选线路作为一组线段序列:遍历与所述待扩充的线段序列两端相邻的所有l条候选线段,并计算将所述l条候选线段中每条候选线段添加进所述待扩充的线段序列s后得到的l个候选扩展序列s'的损失函数值,得到l组损失函数的值,其中,一组损失函数的值与一个候选扩展序列对应,每组所述损失函数的值包括多个损失值;若确认目标组的损失函数值的最大损失值小于设定的损失阈值时,则将与所述目标组的损失函数值对应的候选扩展序列作为下一次循环的待扩展的线段序列;其中,m为大于1的整数,l为大于或等于1的整数。10.如权利要求9所述的方法,其特征在于,在所述将第m次扩充得到的多条候选线路作为一组线段序列之前,所述方法还包括:确认所述一组线段序列的长度大于设定阈值。11.如权利要求9-10任一项所述的方法,其特征在于,所述损失函数通过确认候选扩展序列中相连的候选线段之间的曲率变化的一致性特征来得到各组线段序列。
12.如权利要求3-11任一项所述的方法,其特征在于,在所述将所有不同候选线段划分成多组线段序列之后,所述方法包括:选择相互连通且包含的极大值角点数目和极小值角点数目最多的区域中的线段序列作为所述至少部分线段序列。13.如权利要求3-12任一项所述的方法,其特征在于,所述根据所述目标极大值角点的初始棋盘格坐标值得到所述目标极大值角点的目标棋盘格坐标并根据所述目标极小值角点的初始棋盘格坐标值得到所述目标极小值角点的目标棋盘格坐标值,包括:根据修正量对任一目标极大值角点或者任一目标极小值角点的初始棋盘格坐标进行平移修正,得到所述目标棋盘格坐标。14.如权利要求13所述的方法,其特征在于,在所述根据修正量对任一目标极大值角点或者任一目标极小值角点的初始棋盘格坐标进行平移修正之前,所述方法包括:根据原始棋盘格图像计算所有目标极大值角点与光心的距离,并计算所有目标极小值角点与所述光心的距离,得到一个距离序列;将所述距离序列按照大小排序得到一个有序距离序列(z0、z1、z2、
……
z
i
,z
i 1
……
);将所述有序距离序列中任一两个相邻的距离对应的每3个角点信息联立计算得到两组候选修正量,其中,一组候选修正量表征为(u'
i
,v'
i
),另一组候选修正量表征为(u”i
,v”i
),所述角点信息包括所述目标极大值角点的信息和所述目标极小值角点的信息;根据多组候选修正量得到所述修正量(u
c
,v
c
)。15.如权利要求13所述的方法,其特征在于,在所述根据修正量对任一目标极大值角点或者任一目标极小值角点的初始棋盘格坐标进行平移修正之前,所述方法还包括:根据原始棋盘格图像计算所有目标极大值角点与光心的距离,并计算所有目标极小值角点与所述光心的距离,得到一个距离序列;将所述距离序列按照大小排序得到一个有序距离序列(z0、z1、z2、
……
z
i
,z
i 1
……
);依次获取所述有序距离序列中与各个距离分别对应的各像素点的初始棋盘格纵坐标得到纵坐标序列(v0、v1、v2、
……
),并依次获取所述有序距离序列中与各距离分别对应的各像素点的初始棋盘格横坐标得到横坐标序列(u0、u1、u2、
……
);根据所述有序距离序列中任一相邻两个距离值的比值、所述纵坐标序列和所述横坐标序列中的坐标值计算所述修正量。16.如权利要求15所述的方法,其特征在于,所述根据所述有序距离序列中任一相邻两个距离值的比值、所述纵坐标序列和所述横坐标序列中的坐标值计算所述修正量,包括:计算所述有序距离序列中第i距离z
i
和与所述第i距离z
i
相邻的第i 1距离z
i 1
的比值的平方,得到第一比值,并计算所述第i 1距离z
i 1
和与所述第i 1距离z
i 1
相邻的第i 2距离z
i 2
的比值的平方,得到第二比值;根据所述第一比值、与所述第i距离和所述第i 1距离对应的初始棋盘格坐标构造第一圆方程,并根据所述第二比值、与所述第i 1距离和所述第i 2距离对应的初始棋盘格坐标构造第二圆方程;通过联立所述第一圆方程和所述第二圆方程,得到两个交点,其中,所述两个交点对应两组候选修正量,且一组候选修正量表征为(u'
i
,v'
i
),另一组候选修正量表征为(u”i
,v”i
);
重复上述过程,得到多组候选修正量,并根据所述多组候选修正量得到所述修正量。17.如权利要求14或16所述的方法,其特征在于,所述根据所述多组候选修正量得到所述修正量,包括:从所有候选修正量中选择中位数作为所述修正量。18.如权利要求15所述的方法,其特征在于,所述根据所述有序距离序列中任一相邻两个距离值的比值、所述纵坐标序列和所述横坐标序列中的坐标值计算所述修正量,包括:根据所述有序距离序列中任一相邻两个距离值的比值、所述纵坐标序列和所述横坐标序列中的坐标值获取多组计算结果,其中,一组计算结果与任一相邻的两个距离的比值对应;遍历每一组计算结果并通过各组计算结果计算得到多组候选修正量,其中,一组候选修正量表征为(u
′
i
,v
′
i
),另一组候选修正量表征为(u
″
i
,v
″
i
);确认将所有组候选修正量包括的u
′
i
和u
″
i
的中位数和所有候选修正量包括的v
′
i
和v
″
i
的中位数作为所述修正量,其中,所述修正量为目标棋盘格的坐标原点。19.如权利要求4-18任一项所述的方法,其特征在于,所述根据所述像高进行多项式拟合得到所述径向畸变参数值,包括:根据如下拟合多项式得到所述径向畸变参数值:p(i2)=k
′0 k
′1i2 k
′2(i2)2 k
′3(i2)3其中,p(i2)表征与任一目标极大值角点或任一目标极小值角点对应的像素点与光心的真实距离和畸变距离的比值,所述真实距离为所述任一目标极大值角点或任一目标极小值角点对应的像素点在目标棋盘格坐标系下的像高,所述畸变距离为所述任一目标极大值角点或任一目标极小值角点对应的像素点在像素坐标系下的像素坐标值的像高,k
′0、k
′1、k
′2和k
′3通过拟合方式直接得到,所述径向畸变参数值是通过k
′0、k
′1、k
′2和k
′3的值确定的。20.如权利要求1-19任一项所述的方法,其特征在于,所述镜头为待检测镜头,所述方法还包括:根据所述径向畸变参数值评估所述待检测镜头的性能。21.如权利要求1-20任一项所述的方法,其特征在于,所述镜头为待校正镜头,所述方法还包括:存储所述径向畸变参数值;获取由所述镜头拍摄一张原始图像;根据所述径向畸变参数值对所述原始图像进行校正,获得校正后图像;提供所述校正后图像。22.如权利要求1-21任一项所述的方法,其特征在于,所述镜头为屏下模组镜头。23.一种获取径向畸变参数值的装置,其特征在于,所述装置包括:原始棋盘格图像获取模块,被配置为获取一张原始棋盘格图像,其中,所述原始棋盘格图像是通过镜头对棋盘格图案进行拍摄得到的;目标棋盘格坐标值获取模块,被配置为:提取所述原始棋盘格图像上的角点,并获取以光心作为坐标原点时至少部分所述角点的目标棋盘格坐标值;径向畸变参数值获取模块,被配置为通过所述目标棋盘格坐标值得到所述镜头的径向畸变参数值。24.一种移动终端,特征在于,所述移动终端包括:图像拍摄单元,被配置为采集一张原始棋盘格图像;
存储器,被配置为存储计算机程序;处理器,被配置为根据从所述图像拍摄单元读取所述原始棋盘格图像并运行所述计算机程序得到径向畸变参数值,其中,所述处理器执行所述程序时可实现权利要求1-22中任意一项权利要求所述的方法。25.如权利要求24所述的移动终端,其特征在于,所述图像拍摄单元被配置为:对被测试光源照亮的棋盘格图案进行拍摄,得到所述原始棋盘格图像;对第一显示屏幕照亮的橡胶测试头进行拍摄得到所述原始棋盘格图像,其中,在所述橡胶测试头上靠近所述第一显示屏幕的一面上具有棋盘格图案;或者对由第二显示屏幕显示的棋盘格图案进行拍摄,得到所述原始棋盘格图像。26.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时可实现权利要求1-22中任意一项权利要求所述的方法。27.一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现权利要求1-22中任意一项权利要求所述的方法。28.一种计算机程序产品,其特征在于,所述的计算机程序产品包括计算机程序,其中,所述的计算机程序被处理器执行时可实现如权利要求1-22中任意一项权利要求所述的方法。
技术总结
本申请实施例提供一种获取径向畸变参数值的方法、装置以及移动终端,所述方法包括:获取一张原始棋盘格图像,其中,所述原始棋盘格图像是通过镜头对棋盘格图案进行拍摄得到的;提取所述原始棋盘格图像上的角点,并获取以光心作为坐标原点时至少部分角点的目标棋盘格坐标值;通过所述目标棋盘格坐标值得到所述镜头的径向畸变参数值。本申请的一些实施例针对径向畸变的场景,只需要在菲林膜(Film)、橡胶头或显示屏幕等的辅助下,采集一张棋盘格图像即可得到镜头模组的径向畸变参数值进而完成径向畸变标定,本申请一些实施例的径向畸变参数值的算法具有较高的鲁棒性。数值的算法具有较高的鲁棒性。数值的算法具有较高的鲁棒性。
技术研发人员:邹佳辰
受保护的技术使用者:北京极豪科技有限公司
技术研发日:2021.11.24
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。