1.本发明涉及机器人技术领域,具体涉及一种基于柔性弯曲结构的多足机器人。
背景技术:
2.现代机器人大致分为工业机器人和移动机器人,移动机器人的出现减少了空间对机器人约束。不同环境下的移动机器人采用的移动发机构是多种多样的,大多数采用点击驱动车轮和履带。随着研发的进步,人们意识到电机驱动车轮和履带的方式对于路面状况的依赖度较高,在崎岖的路上难以通行,通过研究科学家们发现,通过仿生学,效仿哺乳动物的腿部运动方式从而实现在不同的道路状况下都可以正常通行。以四足机器人为例,20世纪60年代,四足步行机器人的研究工作开始起步。随着计算机技术和机器人控制技术的研究和应用,到了20世纪80年代,现在四足不行机器人的研制工作进入广泛开展的阶段。世界上第一台四足步行机器人有frank和mcghee于1977 年制作,但是只能呈现固定的运动形式。20世纪80、90年代最具代表性的四足步行机器人是日本shigeo hirose实验室研制的titan系列。2000-2003 年,日本通信大学的木村浩等人成功研制了具有宠物狗外形的机器人 tekken-tv。目前最具代表性的四足机器人是美国bostdynamics实验室研制的big dog。国内四足机器人的研制工作从20世纪80年代起步,取得一定成果的研究机构有上海交通大学、清华大学、哈尔滨工业大学等。四足步行机器人是机电一体化系统,涉及到机构、步态、控制等,而机械机构是整个系统的基础。在机械本体的设计中腿部机构设计是关键。目前,研制的四足步行机器人的腿部机构形式主要有缩放型机构、四连杆机构、并联机构、平行杆机构、多关节串联机构和缓冲型虚拟弹簧腿机构。而四足机器人几种典型步态有:爬行、对角小跑、溜蹄、跳跃、定点旋转、转向等。关于复杂四足步行机器人的控制系统,是非线性的多输入和多输出不稳定系统,具有时变性和间歇动态性。其中,并联机构可以实现多方位运动,且负载能力强,所以具有较好的应用前景,但控制系统较为复杂。另外,含有弹性元件的缓冲型虚拟弹簧腿机构,利用弹性元件把刚性连接变成柔性连接,减缓机器人在动态行走时的冲击以及由此产生的振动。
3.对于四足机器人在实际应用过程中遇到的问题,譬如在不同路况的调节能力不足,由能源和体积质量矛盾带来的续航能力不乐观,由于驱动力延时与不足以及机器人本身的误差,导致机器人在前行中偏离正确的姿态这些问题。国内外的研究人员主要从结构上,如采用足端柔性机构、实施机器人力、位置混合控制等方法进行解决,但这会使结构更加复杂,增加成本。
技术实现要素:
4.本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
5.本发明的目的在于提供一种基于柔性弯曲结构的多足机器人,该机器人利用减速电机提供弯曲前进的动力,利用胶贴提供地面摩擦力,利用舵机周期性改变胶贴位置和调
节电机转速实现行进,其运动的方式参考了海洋生物的运动方式。
6.本发明还有一个目的是提供了基于柔性弯曲结构的多足机器人的爬行方法。
7.为了实现根据本发明的这些目的和其它优点,提供了一种基于柔性弯曲结构的多足机器人,包括,
8.至少两条足,每条足包含一个柔性弯曲结构;所述柔性弯曲结构包括由若干个硬质外框和若干个软体硅胶基体依次交错连接构成的软体躯干,所述软体躯干前端和后端均为所述软体硅胶基体,所述软体硅胶基体外侧固定连接有减速电机固定件,将第一减速电机和第二减速电机分别与所述软体躯干前端和后端的所述软体硅胶基体固定连接;所述第一减速电机与所述第二减速电机侧面的所述减速电机固定件由第一连接绳连接,所述第二减速电机与所述第一减速电机侧面的减速电机固定件由第二连接绳连接;
9.所述第一减速电机和所述第二减速电机上均设置有绕线器,所述第一连接绳缠绕在所述第一减速电机的绕线器上,所述第二连接绳缠绕在所述第二减速电机绕线器上,所述第一连接绳与第二连接绳在所述绕线器上的缠绕方向相同;
10.连接构件,所述连接构件用于连接每条足,所述足分为前足和后足两部分,沿所述多足机器人前进方向上分布于所述连接构件的前后端;所述每条足底部设置有舵机,所述舵机的舵盘圆周方向上部分黏贴有胶贴;
11.所述机器人还包括有控制模块,所述控制模块通过控制所述柔性弯曲结构的第一减速电机和第二减速电机的运行状态来实现所述柔性弯曲模块根据需要弯曲;所述控制模块通过控制所述舵盘旋转来实现所述胶贴根据需要与地面接触。
12.优选的是,其中所述多足机器人可以是两足、三足、四足、六足、八足、十足、十二足机器人中的任意一种。
13.优选的是,其中所述柔性弯曲结构与连接构件的连接方式为卡扣式连接结构。
14.本发明还提供了一种基于柔性弯曲结构的双足机器人,包括:两条足,每条足包含一个柔性弯曲结构;连接构件,所述连接构件用于连接每条足;所述前足和后足各包含一条足,沿所述双足机器人前进方向上分布于所述连接构件的前后端。
15.本发明还提供了一种基于柔性弯曲结构的三足机器人,包括:三条足,每条足包含一个柔性弯曲结构;连接构件,所述连接构件用于连接每条足;所述前足包含两条足,所述后足包含一条足,沿所述三足机器人前进方向上分布于所述连接构件的前后端。
16.本发明还提供了一种基于柔性弯曲结构的四足机器人,包括:四条足,每条足包含一个柔性弯曲结构;连接构件,所述连接构件用于连接每条足;所述前足包含两条足,所述后足也包含两条足,沿所述四足机器人前进方向上分布于所述连接构件的前后端。
17.本发明的目的还可以进一步由基于柔性弯曲结构的多足机器人的爬行方法来实现,该方法包括以下具体步骤,
18.步骤一,所述控制模块控制所述前足足底的所述舵盘旋转,实现所述舵盘上的所述胶贴与地面接触,产生较大摩擦力,使得所述前足基本静止,所述控制模块控制所述后足足底的所述舵盘旋转,实现所述舵盘上的所述胶贴与地面不接触,可以正常移动;
19.步骤二,所述控制模块控制所述前足和所述后足的所述柔性弯曲结构的第一减速电机和第二减速电机启动,将所述第一连接绳拉伸,将所述第二连接绳收紧,实现所述前足和所述后足的所述柔性弯曲模块弯曲,所述前足静止,所述后足由于所属所述柔性弯曲模
块弯曲向前移动;
20.步骤三,所述控制模块控制所述前足足底的所述舵盘旋转,实现所述舵盘上的所述胶贴与地面不接触,可以正常移动;所述控制模块控制所述后足足底的所述舵盘旋转,实现所述舵盘上的所述胶贴与地面接触,产生较大摩擦力,使得所述后足基本静止;
21.步骤四,所述控制模块控制所述前足和所述后足的所述柔性弯曲结构的第一减速电机和第二减速电机启动,将所述第一连接绳收紧,将所述第二连接绳拉伸,实现所述前足和所述后足的所述柔性弯曲模块恢复伸直状态,所述前足由于所属所述柔性弯曲模块恢复伸直状态向前移动;所述后足保持静止;
22.重复步骤一至步骤四,实现所述前足和所述后足的依次静止和移动,完成机器人的持续行进。
23.本发明至少包括以下有益效果:本发明采用仿生海洋生物的行进方式,提高了多足机器人在不同路况上行进的稳定性。同时该多足机器人具有较大的负载,可以与摄像头、录音设备等一系列传感器配合使用,完成侦查勘探作业。
24.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
25.图1为本发明一个实施例中柔性弯曲结构的结构示意图;
26.图2为本发明一个实施例中四足机器人的结构示意图。
具体实施方式
27.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
28.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
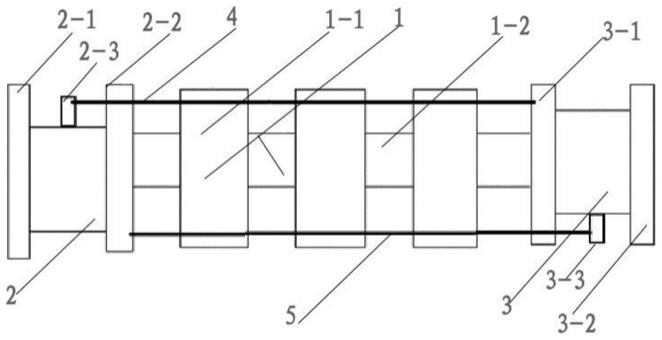
29.如图1和图2所示,一种基于柔性弯曲结构的四足机器人,包括四条足 6-1、6-2、8-1、8-2,每条足包含一个柔性弯曲结构;所述柔性弯曲结构包括由若干个硬质外框1-1和若干个软体硅胶基体1-2依次交错连接构成的软体躯干1,所述软体躯干1前端和后端均为所述软体硅胶基体1-2,所述软体硅胶基体1-2外侧固定连接有减速电机固定件,第一减速电机2左右两侧均设置有减速电机固定件2-1和2-2,第二减速电机3左右两侧均设置有减速电机固定件3-1和3-2,将第一减速电机2和第二减速电机3分别与所述软体躯,1前端和后端的所述软体硅胶基体1-2固定连接;所述第一减速电机2与所述第二减速电机3侧面的所述减速电机固定件3-1由第一连接绳4连接,所述第二减速电机3与所述第一减速电机2侧面的减速电机固定件2-2由第二连接绳5连接;
30.第一减速电机2和第二减速电机3上均设置有绕线器,第一连接绳4缠绕在第一减速电机绕线器2-3上,第二连接绳5缠绕在第二减速电机绕线器 3-3上,第一连接绳4在第一减速电机绕线器2-3上的缠绕方向与第二连接绳 5在第二减速电机绕线器3-3上的缠绕方向相同,如第一连接绳4在第一减速电机绕线器2-3上逆时针缠绕,第二连接绳5在第二减速电机绕线器3-3上也逆时针缠绕;第一连接绳4在第一减速电机绕线器2-3上顺时针缠绕,第
二连接绳5在第二减速电机绕线器上3-3也顺时针缠绕。
31.连接构件7,所述连接构件7用于连接四条足6-1、6-2、8-1、8-2;所述前足包含两条足6-1、6-2,所述后足也包含两条足8-1、8-2,沿所述四足机器人前进方向上分布于所述连接构件7的前后端。所述每条足底部设置有舵机9,所述舵机的舵盘圆周方向上部分黏贴有胶贴10;
32.所述机器人还包括有控制模块,所述控制模块通过控制所述柔性弯曲结构的第一减速电机2和第二减速电机3的运行状态来实现所述柔性弯曲模块根据需要弯曲;所述控制模块通过控制所述舵盘旋转来实现所述胶贴根据需要与地面接触。
33.在这种技术方案中,基于柔性弯曲结构的四足机器人的爬行方法包括以下具体步骤:
34.步骤一,所述控制模块控制所述前足6-1、6-2足底的所述舵盘旋转,实现所述舵盘上的所述胶贴10与地面接触,产生较大摩擦力,使得所述前足 6-1、6-2基本静止,所述控制模块控制所述后足8-1、8-2足底的所述舵盘旋转,实现所述舵盘上的所述胶贴10与地面不接触,可以正常移动;
35.步骤二,所述控制模块控制所述前足6-1、6-2和所述后足8-1、8-2的所述柔性弯曲结构的第一减速电机2和第二减速电机3启动,将所述第一连接绳4拉伸,将所述第二连接绳5收紧,实现所述前足6-1、6-2和所述后足8-1、 8-2的所述柔性弯曲模块弯曲,所述前足6-1、6-2静止,所述后足8-1、8-2 由于所属所述柔性弯曲模块弯曲向前移动;
36.步骤三,所述控制模块控制所述前足6-1、6-2足底的所述舵盘旋转,实现所述舵盘上的所述胶贴10与地面不接触,可以正常移动;所述控制模块控制所述后足8-1、8-2足底的所述舵盘旋转,实现所述舵盘上的所述胶贴10 与地面接触,产生较大摩擦力,使得所述后足8-1、8-2基本静止;
37.步骤四,所述控制模块控制所述前足6-1、6-2和所述后足8-1、8-2的所述柔性弯曲结构的第一减速电机2和第二减速电机3启动,将所述第一连接绳4收紧,将所述第二连接绳5拉伸,实现所述前足6-1、6-2和所述后足8-1、 8-2的所述柔性弯曲模块恢复伸直状态,所述前足6-1、6-2由于所属所述柔性弯曲模块恢复伸直状态向前移动;所述后足8-1、8-2保持静止;
38.重复步骤一至步骤四,实现所述前足6-1、6-2和所述后足8-1、8-2的依次静止和移动,完成机器人的持续行进。
39.在另一种实例中,所述多足机器人可以是两足、三足、六足、八足、十足、十二足机器人中的任意一种。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本发明时,可以根据使用者需求实施态样。
40.上述方案中的所述连接构件7的一种实现方式为:所述柔性弯曲结构与所述连接构件7的连接方式为卡扣式连接结构。采用这样的方案使得连接更加灵活。
41.上述方案中的基于柔性弯曲结构的双足机器人一种实现方式为:两条足,每条足包含一个柔性弯曲结构;
42.连接构件,所述连接构件用于连接每条足;所述前足和后足各包含一条足,沿所述双足机器人前进方向上分布于所述连接构件的前后端。
43.上述方案中的基于柔性弯曲结构的三足机器人一种实现方式为:三条足,每条足
包含一个柔性弯曲结构;
44.连接构件,所述连接构件用于连接每条足;所述前足包含两条足,所述后足包含一条足,沿所述三足机器人前进方向上分布于所述连接构件的前后端。
45.这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
46.如上所述,本发明采用仿生海洋生物的行进方式,提高了多足机器人在不同路况上行进的稳定性。同时该多足机器人具有较大的负载,可以与摄像头、录音设备等一系列传感器配合使用,完成侦查勘探作业。
47.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。