1.本发明涉及图像仿真领域,尤其是涉及一种地外星体表面光照仿真影像生成方法和系统。
背景技术:
2.通过地形和星历数据对地外星体表面进行影像仿真对于未来深空探测活动具有重要的意义。以月球为例,目前人类获得的月球表面光学影像的分辨率已达0.5~1.5米/像素(lroc nac影像),这些影像包含着月球表面极为丰富的形貌细节信息。然而,每一幅影像在拍摄时都具有不同的太阳光照条件,这意味着影像中阴影方向和范围的不一致,严重地干扰着遥感影像在制图与空间分析等方面的应用。通过地形和星历数据反向仿真出影像,在影像的校准、多源遥感数据的融合以及高精度制图等领域有着积极意义。经典的影像地图仿真方案使用光线追踪原理计算光照遮挡和反射情况,虽精度较高但运算复杂,不适合大规模的影像仿真任务。而相应的简化方案通常是缩短计算光照遮挡的过程中需要考虑的最大边界,本质上是为了提高运算效率而舍弃了精度,在太阳高度角较低的时刻,这种近似会引入严重的误差。考虑到月球极地区域的太阳高度角变化范围局限在约
±
1.5
°
以内,这类场景的精确影像仿真需求是不可忽略的。
3.综上所述,目前对于影像的仿真进行了大量的工作,但是对于高精度、高分辨率、大规模的地外星体光照仿真任务,尚无合适的方法。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于地形和星历数据,对地外星体表面进行快速、高分辨率、高精度的地外星体表面光照仿真影像生成方法和系统。
5.本发明的目的可以通过以下技术方案来实现:
6.一种地外星体表面光照仿真影像生成方法,包括以下步骤:
7.s1、将地形数据从地形栅格空间转化到笛卡尔空间,为地形栅格建立点云矢量形式的拓补;对所有地形单元以固定的方位角间隔搜索最大地形遮挡仰角,将每个方位角下全部地形单元的最大地形遮挡仰角数值按照地形栅格空间拓扑记录为一幅地平线地图;一组均匀覆盖360
°
方位角范围的地平线地图视为对连续地平线的采样,定义为地平线数据库;
8.s2、对于一个特定的时刻,通过星历查询到目标地形中心点处的太阳高度角与方位角;对于一个具体的太阳方位角,在地平线数据库中查询到最近邻的两幅地平线地图,进而在每一个栅格处,对两幅地平线地图中对应的数值按方位角差进行线性插值,得到当前方位角下新的地平线地图;在地形栅格空间中定义新的布尔型栅格数据,称为布尔明暗地图,比较当前方位角下地平线地图中记录的最大地形遮挡仰角和当前的太阳高度角,若太阳高度角数值较大则将布尔明暗地图的对应栅格赋值为true,否则赋值为false;
9.s3、定义以一个查询点为中心,r为半径的球形区域为地形点的邻域范围;计算查询点到邻域点的向量坐标,进行协方差分析,计算协方差矩阵的特征值,以最小特征值对应的特征向量作为查询点的法向量,该法向量以地外星体球心的反方向为正;
10.s4、逐栅格计算法向量与表示太阳方位的单位向量之间的点积,将结果记录在新栅格的对应位置,定义新栅格为反射比地图;将反射比地图、布尔明暗地图以及预设的反照率地图逐栅格做乘法,得到仿真影像。
11.进一步地,步骤s1中,笛卡尔空间的原点位于地形栅格的中心点,xoy平面与原点处地外星体的切面重合。
12.进一步地,步骤s1中,拓补空间中的点的近邻关系由k-d树描述。
13.进一步地,步骤s3中,半径r的取值为地形栅格中最大栅格边长的1.5倍。
14.进一步地,步骤s4中,预设的反照率地图初始化为1。
15.一种地外星体表面光照仿真影像生成系统,包括处理器和存储器,所述处理器调用所述存储器中存储的程序,执行以下步骤:
16.s1、将地形数据从地形栅格空间转化到笛卡尔空间,为地形栅格建立点云矢量形式的拓补;对所有地形单元以固定的方位角间隔搜索最大地形遮挡仰角,将每个方位角下全部地形单元的最大地形遮挡仰角数值按照地形栅格空间拓扑记录为一幅地平线地图;一组均匀覆盖360
°
方位角范围的地平线地图视为对连续地平线的采样,定义为地平线数据库;
17.s2、对于一个特定的时刻,通过星历查询到目标地形中心点处的太阳高度角与方位角;对于一个具体的太阳方位角,在地平线数据库中查询到最近邻的两幅地平线地图,进而在每一个栅格处,对两幅地平线地图中对应的数值按方位角差进行线性插值,得到当前方位角下新的地平线地图;在地形栅格空间中定义新的布尔型栅格数据,称为布尔明暗地图,比较当前方位角下地平线地图中记录的最大地形遮挡仰角和当前的太阳高度角,若太阳高度角数值较大则将布尔明暗地图的对应栅格赋值为true,否则赋值为false;
18.s3、定义以一个查询点为中心,r为半径的球形区域为地形点的邻域范围;计算查询点到邻域点的向量坐标,进行协方差分析,计算协方差矩阵的特征值,以最小特征值对应的特征向量作为查询点的法向量,该法向量以地外星体球心的反方向为正;
19.s4、逐栅格计算法向量与表示太阳方位的单位向量之间的点积,将结果记录在新栅格的对应位置,定义新栅格为反射比地图;将反射比地图、布尔明暗地图以及预设的反照率地图逐栅格做乘法,得到仿真影像。
20.进一步地,步骤s1中,笛卡尔空间的原点位于地形栅格的中心点,xoy平面与原点处地外星体的切面重合。
21.进一步地,步骤s1中,拓补空间中的点的近邻关系由k-d树描述。
22.进一步地,步骤s3中,半径r的取值为地形栅格中最大栅格边长的1.5倍。
23.进一步地,步骤s4中,预设的反照率地图初始化为1。与现有技术相比,本发明具有以下有益效果:
24.本发明通过预先建立地平线数据库实现明暗信息的快速计算,进而结合朗伯反射原理在相同空间拓扑下实现反射强度的精确模拟,因此兼顾了仿真的精度和渲染的时间,实现了快速、高分辨率、高精度的地外星体表面光照影像仿真。
附图说明
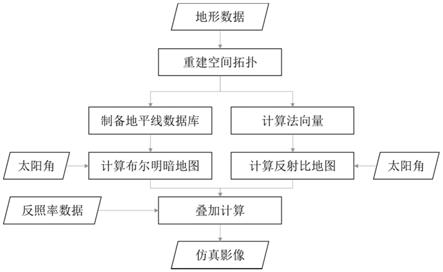
25.图1为本发明的流程示意图。
26.图2a为月球南极沙克尔顿坑边缘0.5米分辨率lroc影像。
27.图2b为为月球南极沙克尔顿坑边缘5米分辨率的仿真影像。
具体实施方式
28.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
29.本实施例提供了一种地外星体表面光照仿真影像生成方法,主要包括以下几个方面:
30.一、基于几何遮挡的布尔明暗地图的快速计算
31.a:地平线数据库的制作:包括从地理栅格空间到笛卡尔空间的转化,点云矢量的拓扑重建;包括光源方位角的离散化与遍历,以及地平线的搜索与记录;
32.b:布尔明暗地图的内插:包括在地平线数据库中内查出光源方位角下的地平线地图,以及结合光源高度角的阴影区域判断。
33.二、基于地形的反照率快速计算
34.a:求解地形法向量:在矢量拓扑中,基于邻域估算法向量;
35.b:估算仿真影像亮度值:结合光源向量与法向量,渲染出逼真的影像效果。
36.如图1所示,本实施例的步骤具体展开如下:
37.步骤s1、地平线数据库的制作
38.地形数据通常是以地理经纬度栅格或投影栅格的形式储存。为了更好地计算遮挡,在笛卡尔空间中描述每个栅格的中心点坐标,进而以三坐标向量的形式为地形栅格建立另一套拓扑。其中笛卡尔空间的原点位于地形栅格的中心点,xoy平面与原点处星球的切面重合。在新的拓扑空间中,点的近邻关系由k-d树描述。进而对所有的地形点沿xoy平面以固定的方位角间隔搜索地平线。于是对于某一个特定的方位角,就可以获得一幅具有原始栅格拓扑的地平线(仰角)地图。一组这样的均匀覆盖360
°
方位角范围的地平线地图可以视为对连续地平线的采样,定义为地平线数据库。
39.步骤s2、布尔明暗地图的内插
40.对于一个特定的时刻,首先通过星历查询到目标地形中间点处的太阳高度角与方位角。然后,对于一个具体的太阳方位角,在地平线数据库中查询到最近邻的两幅地平线地图,进而在每一个栅格处,对两幅地平线地图中对应的数值对地平线地图上的每一个栅格按方位角差进行线性插值,得到当前方位角下新的地平线地图;在地形栅格空间中定义新的布尔型栅格数据,称为布尔明暗地图,比较当前方位角下地平线地图中记录的最大地形遮挡仰角和当前的太阳高度角,若太阳高度角数值较大则将布尔明暗地图的对应栅格赋值为true,否则赋值为false;这样就获得了当前时刻下的布尔明暗地图。
41.步骤s3、求解地形法向量
42.由于地形数据的真实拓扑是以矢量形式记录,所以需要首先确定邻域影响范围。定义以查询点为中心,r为半径的球形区域为地形点的邻域范围(r建议取值为1.5倍最大栅
格边长)。然后,计算查询点到邻域点的向量坐标,进行协方差分析,计算协方差矩阵的特征值,以最小特征值对应的特征向量作为查询点的法矢。接下来定义法矢方向,以月球球心的反方向为正。
43.步骤s4、估算仿真影像亮度值,进行仿真影像渲染
44.对地形栅格中任意一点独立得到地形法向量之后,将该向量归一化为单位向量,进而与表示太阳方位的单位向量做点积,得到的结果记录在对应的栅格位置处,定义新栅格为反射比地图(reflectance)。根据影像强度公式(1),将反射比地图与对应时刻的布尔明暗地图(bs,boolean shadow)以及预设的反照率地图逐栅格做乘法,即可得到一幅真实时刻下的仿真影像(intensity)。其中,反照率地图(albedo)若无定义,会初始化为1。
45.intensity=bs
×
reflectance
×
albedo
ꢀꢀꢀ
(1)
46.实验与分析
47.本次实验的平台为选取月球南极附近5米分辨率的lola dem作为地形数据源,进行仿真影像地图的计算。同时,将使用本发明中的方法制作出的仿真光照图与实际的lroc影像进行对比。图2a和图2b可以证明本发明可以准确地仿真出月球表面任意时刻的高分辨率影像地图。其中,图2b的数据量为十万像素规模(1800
×
400),计算和渲染耗时仅为0.79秒
48.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。