多功能手术工具和系统
1.相关申请案的交叉参考
2.本技术案主张2020年9月15日申请且名称为《多功能手术工具和系统(multifunctional surgical tool and system)》的美国临时申请案第63,078,724号的权益,所述申请案以全文引用的方式并入本文中。
技术领域
3.本发明技术大体上涉及手术工具,且更确切地说涉及用于提供机械和电外科能力两者的手术工具。
背景技术:
4.通常需要各种手术工具来成功地完成手术程序。不同程序可需要某些类型的工具。机械手术工具包含钻子、锉刀、锯子、刮刀、解剖刀、绞刀和丝锥。电外科工具利用所施加电流以用于烧灼、消融、电灼和干燥。电外科工具可包含单极或双极电极模型。
技术实现要素:
5.本公开的实例方面包含:
6.根据本公开的至少一个实施例的手术工具包括用于选择性地切割或去除解剖组织的机械工具和选择性地可操作以将电流施加到解剖组织的电外科装置。机械工具包括刀具;和驱动器,其可操作地连接到刀具。电外科装置包括第一电极;和第二电极,其不同于第一电极。
7.本文中的方面中的任一个,其中第一电极和第二电极中的至少一个可从当操作电外科装置时使用的第一位置回缩到当操作机械工具时使用的第二位置。
8.本文中的方面中的任一个,其中第一电极是刀具。
9.本文中的方面中的任一个,其中刀具与第一电极和第二电极绝缘。
10.本文中的方面中的任一个,其中驱动器的启动停用电外科装置。
11.本文中的方面中的任一个,其中驱动器和电外科装置可同时操作。
12.本文中的方面中的任一个,其中刀具包括钻头、锉刀、锯子、超声刀或刮刀。
13.本文中的方面中的任一个,其进一步包括接近电外科装置的远侧末端的用于排出流体的流体导管。
14.本文中的方面中的任一个,其中刀具的延伸使得第一电极和第二电极中的至少一个从操作位置移动到非操作位置。
15.本文中的方面中的任一个,其中第一电极和第二电极中的至少一个朝向操作位置偏置。
16.一种双模式手术系统,其包括:壳体,其具有近侧末端和远侧末端;机械刀具,其至少部分地支撑在壳体内;电外科装置,其由壳体支撑,电外科装置包括至少一个电(例如,rf)导体;和流体导管,其用于引导流体以接近远侧末端。
17.本文中的方面中的任一个,其进一步包括用于从流体导管选择性地释放流体的阀门。
18.本文中的方面中的任一个,其中机械刀具包括电外科装置的电极。
19.本文中的方面中的任一个,其中机械刀具可在回缩位置与延伸位置之间移动。
20.本文中的方面中的任一个,其中至少一个电(例如,rf)导体包括铰接地连接到壳体的第一和第二元件,第一和第二元件中的每一个可在断开位置与闭合位置之间移动,在所述断开位置中第一元件并不接触第二元件,在所述闭合位置中第一元件与第二元件接触。
21.本文中的方面中的任一个,其中第一和第二元件朝向闭合位置偏置。
22.一种根据本公开的至少一个实施例的手术工具,其包括:壳体;第一刀具,其可操作地连接到马达且由壳体支撑,第一刀具与第一电引线电接触;第二刀具,其由壳体支撑且与壳体内的第一刀具绝缘,第二刀具与不同于第一电引线的第二电引线电接触;和用户接口,其可操作以选择未供电模式、第一供电模式或第二供电模式,在所述未供电模式中第二刀具可用于修改解剖组织,在所述第一供电模式中第一刀具可用于修改解剖组织,在所述第二供电模式中第一刀具和第二刀具用于将电流施加到解剖组织。
23.本文中的方面中的任一个,其中第一刀具和第二刀具中的一个包括接近其工作端的用于排出流体的流体导管。
24.本文中的方面中的任一个,其中第一刀具是脊柱刮刀,且第二刀具是刮匙。
25.本文中的方面中的任一个,其中脊柱刮刀包括可操作以在第二供电模式中排出流体的流体导管。
26.任何方面与任何一个或多个其它方面结合。
27.本文中公开特征中的任何一个或多个。
28.本文中大体上公开特征中的任何一个或多个。
29.本文中大体上公开的特征中的任何一个或多个与本文中大体上公开的任何一个或多个其它特征组合。
30.方面/特征/实施例中的任一个与任何一个或多个其它方面/特征/实施例组合。
31.使用本文中公开的方面或特征中的任何一个或多个。
32.应了解,本文中所描述的任何特征可与如本文中所描述的任何其它特征组合来要求保护,而不管特征是否来自同一所描述的实施例。
33.在下文的附图和描述中阐述本公开的一个或多个方面的细节。本公开中所描述的技术的其它特征、目标和优点将从描述和图式且从权利要求书而显而易见。
34.短语“至少一个”、“一个或多个”以及“和/或”是在操作中具有连接性和分离性两者的开放式表述。举例来说,表述“a、b和c中的至少一个”、“a、b或c中的至少一个”、“a、b和c中的一个或多个”、“a、b或c中的一个或多个”以及“a、b和/或c”意指仅a、仅b、仅c、a和b一起、a和c一起、b和c一起,或a、b和c一起。当上述表述中的a、b和c中的每一个都指代如x、y和z的一个元素或如x
1-xn、y
1-ym和z
1-zo的一类元素时,短语意指选自x、y和z的单个元素、选自同一类的元素(例如x1和x2)的组合以及选自两个或更多类的元素(例如y1和zo)的组合。
35.术语“一(a/an)”实体指所述实体中的一个或多个。如此,术语“一(a/an)”、“一个或多个”和“至少一个”在本文中可以可互换地使用。还应当注意,术语“包括”、“包含”和“具
pentium)处理器;amd锐龙(amd ryzen)处理器;amd速龙(amd athlon)处理器;amd羿龙(amd phenom)处理器;苹果(apple)a10或10x fusion处理器;苹果a11、a12、a12x、a12z或a13仿生处理器;或任何其它通用微处理器)、专用集成电路(asic)、场可编程逻辑阵列(fpga)或其它等效集成或离散逻辑电路。因此,如本文中所使用的术语“处理器”可指前述结构或适合于实施所描述的技术的任何其它物理结构中的任一个。而且,所述技术可完全实施于一个或多个电路或逻辑元件中。
49.在详细地解释本公开的任何实施例之前,应当理解,本公开在其应用方面不限于以下描述中阐述或附图中示出的构造细节和组件布置。本公开能够具有其它实施例且能够以各种方式实践或进行。同样,应理解,本文中所使用的措词和术语是出于描述的目的且不应视为是限制性的。本文中使用“包含”、“包括”或“具有”以及其变化形式意在涵盖其后列出的项目和其等效物以及额外项目。此外,本公开可使用实例来示出其一个或多个方面。除非另有明确说明,否则使用或列出一个或多个实例(其可由“例如(for example)”、“借助于实例”、“例如(e.g.)”、“如”或类似语言指示)不旨在且并不限制本公开的范围。
50.在骨科手术中,外科医生可使用电动工具来切割、钻取或锉刺下骨骼。这些电动工具可包含旋转和/或振荡工具。所述旋转和/或振荡工具可在包含超声频段的各种频率下旋转和/或振荡。在手术期间,外科医生可首先通过去除覆盖骨骼的任何软组织来暴露骨骼。然而,电动工具与软组织之间的相互作用可引起电动工具的效率降低、电动工具的堵塞或软组织的牵拉,这可对患者有害。此外,电动工具可设计成具有组织选择性,且因此,可不穿透软组织。
51.根据本公开的实施例的手术工具可含有与配置成执行电外科手术的电外科组件组合的机械工具(例如,钻子、锉刀、锯子、摆锯、丝锥、超声工具等)。电外科组件可以是或包括双极或单极配置。手术工具可能够启动电外科组件以帮助消融覆盖机械工具的路径的软组织等等。因此,电外科组件可清除机械工具的路径。另外或替代地,电外科组件可用于停止患者出血。
52.手术工具可通过将机械工具尖端电隔离来使用机械工具尖端(例如,钻子、锉刀、锯子、摆锯、丝锥、超声工具等)作为电外科组件。换句话说,机械工具尖端可与任何导电表面隔离且配置成执行电外科任务。另外或替代地,机械工具尖端可具有可从手术工具突出以提供电外科功能性的额外元件。
53.在脊椎融合之前通过去除纤维/凝胶状髓核以及含于其中的内部瓣环物质来准备椎间盘。在椎间盘准备期间,所述物质的快速去除可以是优选的,同时经过脊髓和神经节的次数可最小化。另外,椎间盘准备可充分准备软骨终板且暴露出血骨骼而不破坏所述终板或暴露松质骨。此外,在一些实施例中,瓣环在椎间盘准备期间不被穿孔。虽然在其它实施例中,瓣环可最初被穿孔以用于接近以准备椎间盘。
54.根据本公开的实施例的手术工具可实施具有射频(rf)能力的电动脊柱刮刀技术。手术工具可在椎间盘准备期间在应用脊柱刮刀之前执行rf预处理步骤。另外或替代地,手术工具可含有或包括双极脊柱刮刀装置,其允许独立于脊柱刮刀的rf的部署,从而允许手术工具操作为冷刮板。手术工具可包括刮匙,其可充当rf电极中的一个,同时脊柱刮刀的切割刀片可充当另一电极以执行双极电外科手术。手术工具可额外含有能够将生理盐水沖洗出脊柱刮刀的流体储集器。所冲洗的生理盐水可有助于移动和操作手术工具,以及有助于
物质去除。
55.此类手术工具可通过脊柱刮刀手持机来提供低剂量rf功率,所述脊柱刮刀手持机修改成将脊柱刮刀视为返回电极。刮匙可充当主rf电极,其可视需要通过手术工具的操作员而用于rf传递或用于物质去除。通过应用rf预处理,椎间盘内所含有的胶原蛋白可变换成可由脊柱刮刀装置更容易地切割和去除的形式。
56.现转向图1,示出根据本公开的至少一个实施例的系统100的框图。系统100可例如用于进行利用如本文中所描述的多功能手术工具的程序,或收集与此类程序相关的信息;以结合手术程序或任务来改善患者结果;或用于任何其它有用目的。系统100包括计算装置102、手术工具130、机器人140、数据库144和云148。尽管前述内容,根据本公开的其它实施例的系统可省略机器人140、数据库144和/或云148中的任何一个或多个。另外,根据本公开的其它实施例的系统可不同地配置系统100的一个或多个组件(例如,手术工具130可包括计算装置102的组件中的一个或多个,和/或反之亦然)。
57.计算装置102包括至少一个处理器104、至少一个通信接口108、至少一个用户接口112和至少一个存储器116。根据本公开的其它实施例的计算装置可省略通信接口108和/或用户接口112中的一个或两个。
58.计算装置102的至少一个处理器104可以是本文中所识别或描述的任何处理器或任何类似处理器。至少一个处理器104可配置成执行存储于至少一个存储器116中的指令124,所述指令124可使得至少一个处理器104利用或基于例如从手术工具130、机器人140、数据库144和/或云148接收的数据而进行一个或多个计算步骤。指令124还可使得至少一个处理器104利用存储于存储器116中的一个或多个算法128。在一些实施例中,至少一个处理器104可用于在手术程序期间,包含在由机器人140使用手术工具130自主地或半自主地进行的程序期间控制手术工具130和/或机器人140。
59.计算装置102还可包括至少一个通信接口108。至少一个通信接口108可用于接收传感器数据(例如,来自手术工具130)、手术计划或其它计划数据,或来自外部源(如手术工具130、机器人140、数据库144、云148和/或便携式存储媒体(例如,usb驱动器、dvd、cd))的其它信息;和/或用于将指令、图像或来自至少一个处理器104和/或(更一般地说)计算装置102的其它信息传输到外部系统或装置(例如,另一计算装置102、手术工具130、机器人140、数据库144、云148和/或便携式存储媒体(例如,usb驱动器、dvd、cd))。至少一个通信接口108可包括一个或多个有线接口(例如,usb端口、以太网端口、火线端口)和/或一个或多个无线接口(例如,配置成经由一个或多个无线通信协议,如802.11a/b/g/n、蓝牙、低功耗蓝牙、nfc、紫蜂等等来传输信息)。在一些实施例中,至少一个通信接口108可适用于使得装置102能够与一个或多个其它处理器104或计算装置102通信,无论是减小完成计算密集任务所需的时间或是出于任何其它原因。
60.至少一个用户接口112可以是或包括键盘、鼠标、轨迹球、监测器、电视、触摸屏、按钮、操纵杆、开关、杠杆和/或用于从用户接收信息和/或用于将信息提供到计算装置102的用户的任何其它装置。至少一个用户接口112可例如用于接收用户选择或其它用户输入;接收关于计算装置102、手术工具130、机器人140和/或系统100的另一组件的一个或多个可配置设置的用户选择或其它用户输入;接收关于如何存储和/或传送由计算装置102接收、修改和/或生成的数据和/或将所述数据存储和/或传送到何处的用户选择或其它用户输入;
和/或基于由计算装置102接收、修改和/或生成的数据而向用户显示信息(例如,本文、图像)和/或播放声音。
61.虽然至少一个用户接口112示出为计算装置102的部分,但在一些实施例中,计算装置102可利用与计算装置102的一个或多个其余组件分开容纳的用户接口112。在一些实施例中,用户接口112可接近计算装置102的一个或多个其它组件定位,而在其它实施例中,用户接口112可远离计算机装置102的一个或多个其它组件定位。
62.至少一个存储器116可以是或包括ram、dram、sdram、其它固态存储器、本文中所描述的任何存储器或用于存储计算机可读数据和/或指令的任何其它有形的非暂时性存储器。至少一个存储器116可存储例如指令124和/或算法128。在一些实施例中,存储器116还可存储一个或多个手术前和/或其它手术计划;一个或多个患者的一个或多个图像,确切地说,包含待在其上执行一个或多个手术程序的一个或多个患者的解剖特征;从手术工具130(包含其任何组件)或别处接收到的数据;和/或适用于与本公开相关的其它信息。
63.如上文所描述的指令124可以是或包括用于由至少一个处理器104执行以使得至少一个处理器进行本文中所描述的方法中的任一种的一个或多个步骤的任何指令。指令124可以是或包括用于进行程序的指令。指令124可另外或替代地使得至少一个处理器104和/或(更一般地说)计算装置102能够在从如本文中所描述的手术工具获得的信息可与其相关的任何手术程序期间提高积极程序结果的可能性。
64.算法128可以是或包括适用于将从手术工具130接收到的传感器数据转换成有意义信息(例如,所计算的力值、压力值、距离测量值)的任何算法。算法128可进一步是或包括适用于基于从手术工具130接收到的信息而生成对外科医生或系统100的其它用户的一个或多个建议和/或用于基于此类信息和/或此类信息的评估而修改手术前或其它手术计划的任何算法。算法128可进一步是或包括适用于控制手术工具130和/或机器人140的算法。在一些实施例中,算法128可以是或包含机器学习算法。
65.手术工具130包括机械装置132、电外科装置134和通信接口136。手术工具130适于在手术程序期间执行手术操作等等,且可与计算装置102、机器人140、数据库144和/或云148通信。在一些实施例中,手术工具包括额外机械装置和/或电外科工具,使得手术工具能够执行各种手术任务。举例来说,在一些实施例中,手术工具130可包括两个机械装置(例如,钻子和锉刀)和电外科装置(例如,电烙装置)。在这一例子中,手术工具130可能够使用钻子和锉刀,同时还能够启动电烙装置。同样在一些实施例中,机械装置132可包括马达和与多个工具中的一个可能可操作地和可拆卸地固定的轴,所述多个工具如钻头、锉刀、螺丝起子或任何其它旋转刀具。手术工具130可手动地或自动地操作。在手术程序由机器人140进行时,手术工具130可由外科医生利用或可由计算装置102控制。在一些实施例中,系统100可包括超过一个手术工具130。
66.手术工具130的机械装置132配置成执行机械手术任务。举例来说,机械装置132可以是设计成钻透解剖组织的钻子。在一些实施例中,机械装置132可执行不同机械手术任务。举例来说,机械装置132可设计、塑形或以其它方式配置成在解剖组织上执行钻取、锉刺、剃刮、锯切、切割、绞孔、穿透和/或攻丝任务。
67.手术工具130的电外科装置134配置成执行电外科手术。电外科手术可由电外科装置134实施,例如,以补充使用机械工具切断解剖组织的常规方法。在手术期间,外科医生可
利用电外科手术以用于各种目的,以便划分或干燥解剖组织,以及使出血凝结(例如,通过电灼出血解剖组织)。电外科手术可通过两个不同电极配置实施:单极和双极。在单极电外科手术中,有源电极放置在手术部位处。返回电极放置在患者的身体上的别的地方。在电路通电后,电流流动通过有源电极到返回电极,其中电流流经患者的身体。流经患者的身体的电流基于电流的电流量、密度和波形而在手术部位处形成所要电学效果。替代地,可执行双极电外科手术。在双极电外科手术中,返回电极是手术工具的组件,而非在患者的身体上的别处定位的独立组件。由于手术工具含有两个电极,所以不需要定位于患者的身体上的返回电极;实际上,电流流经定位于手术工具的有源电极与返回电极之间和附近的任何组织。
68.通过调制由电源生成的波形,目标部位经历不同效果。举例来说,通过使用如连续正弦波形的波形,外科医生能够汽化或切割目标部位处的组织。通过使用间歇波形,电外科手术短暂地产生更多热量,从而允许目标部位的凝结。通过提高波形的间歇性,外科医生能够在电极之间产生热谱,这可用于执行各种水平的凝结和/或组织汽化。
69.通信接口136可与通信接口108相同或类似。举例来说,通信接口136可用于从外部源(如计算装置102、机器人140)接收操作指令和/或控制信号,和/或用于将数据(例如,对应于由手术工具130形成的一个或多个测量值)或其它信息传输到外部系统或装置(例如,计算装置102、机器人140、数据库144、云148和/或便携式存储媒体(例如,usb驱动器、dvd、cd))。通信接口136可包括一个或多个有线接口(例如,usb端口、以太网端口、火线端口)和/或一个或多个无线接口(例如,配置成经由一个或多个无线通信协议,如802.11a/b/g/n、蓝牙、低功耗蓝牙、nfc、紫蜂等等来传输信息)。在一些实施例中,通信接口136可适用于使得装置102能够与一个或多个其它处理器104或计算装置102通信,无论是减小完成计算密集任务所需的时间或是出于任何其它原因。
70.机器人140可以是任何手术机器人或手术机器人系统。机器人140可以是或包括例如马祖(mazor)x
tm
潜行版机器人引导系统。机器人140可包括底座,所述底座支撑配置成固持手术工具130的机器人臂。机器人140可包括一个或多个机器人臂,其中的每一个可配置成固持手术工具130。机器人140可在一些实施例中帮助手术程序(例如,通过在外科医生或其它用户操作工具时将所述工具保持在所要轨迹或姿势中和/或支撑工具的重量,或以其它方式)和/或自动地进行手术程序。机器人140可包括适用于收集关于机器人或其任何部分相对于患者或(更具体地说)相对于患者的脊柱定位在何处的信息的一个或多个传感器。机器人140可进一步包括适用于辅助机器人140确定其是否具有良好抓握(purchase)和/或正确地被定位的一个或多个传感器。
71.数据库144可存储图1中示出为存储于存储器116中的任何信息,包含如指令124的指令和/或如算法128的算法。在一些实施例中,数据库144存储一个或多个手术前或其它手术计划。数据库144可另外或替代地存储例如关于或对应于手术工具130的一个或多个特性的信息和/或关于用于与手术程序相关的可用工具和/或设备的其它信息。数据库144可配置成将任何此类信息提供到计算装置102、手术工具130、机器人140或系统100的任何其它装置或系统100外部的任何其它装置,无论直接或经由云148。在一些实施例中,数据库144可以是或包括医院图像存储系统的一部分,如图片存档与通信系统(pacs)、健康信息系统(his)和/或用于收集、存储、管理和/或传输包含图像数据的电子医疗记录的另一系统。同样在一些实施例中,存储器116可存储上文所描述的信息中的任一个。
72.云148可以是或表示因特网或任何其它广域网。计算装置102可经由通信接口108使用有线连接、无线连接或两者连接到云148。在一些实施例中,计算装置102可经由云148与数据库144和/或外部装置(例如,计算装置)通信。
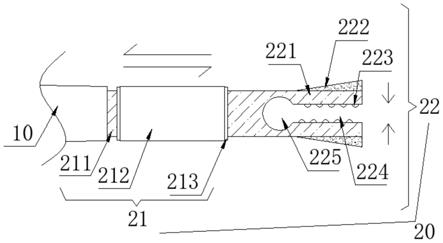
73.现参看图2,根据本公开的实施例的手术工具200包括马达204、旋转轴208、旋转绝缘体212、刀具216、绝缘支撑件220、壳体224、rf引线228和导线232。尽管手术工具200的布局如图2中所示出,但根据本公开的其它实施例的手术工具可包括比手术工具200更多或更少的组件。在一些实施例中,举例来说,rf引线228可在手术工具200内具有互补电极,使得手术工具200能够执行双极电外科手术。
74.马达204从电源(图中未示)接收电力且将电力转换成机械能量以操作手术工具200的刀具216。马达204安置于手术工具200的壳体224的近侧末端内。马达204可操作地附接到旋转轴208的近侧末端且引起旋转轴208、旋转绝缘体212和刀具216的旋转运动。如以上和本文中所使用,术语“近侧末端”是指接近手术工具的操作员的工具或部件的末端或方位,且术语“远侧末端”或“工作端”是指接近患者的工具或部件的末端或方位。在一些实施例中,马达204可在类型和设计上变化以最好地匹配由手术工具200执行的手术的要求。可使用的马达类型的一些非限制性实例包含dc有刷马达、ac或dc无刷马达、直接驱动马达、伺服马达、步进式马达、涡轮马达、气动马达或类似物。在一些实施例中,马达204可提供线性运动以替代或补充旋转轴208中的旋转运动,如当手术工具200的刀具216需要线性运动来执行操作时。在这种情况下,马达204可以是设计成提供旋转轴208中的平移运动的线性马达,或马达204可设计成在旋转轴208、旋转绝缘件212和/或刀具216中产生平移和旋转运动两者。在一些实施例中,一个或多个齿轮或其它机械装置(例如,齿条与小齿轮)可用于将(例如,附接到马达204的轴208的)旋转运动转换成平移运动,和/或反之亦然。
75.手术工具200的旋转绝缘体212定位于壳体224内且可操作地附接到旋转轴208的远侧末端。旋转绝缘体212配置成接纳刀具216的近侧末端的一部分且将扭转/旋转能量从旋转轴208传递到刀具216。旋转绝缘体212还提供旋转轴208与刀具216之间的物理和电分离,这有助于防止电流不恰当地流动通过手术工具200。举例来说,在刀具216接收电流(如在电外科手术的执行期间)的情况下,旋转绝缘体212防止电流流动通过旋转轴208且进入马达204。避免电流在朝向马达204的近侧方向上回流降低对马达204的损害的概率且减少手术工具200内的短路的机会。
76.旋转绝缘体212由设计成防止电流流经其的绝缘材料构成。在一些实施例中,旋转绝缘体212可均一地包括单一绝缘材料。举例来说,旋转绝缘体212可完全由塑料形成。替代地,在一些实施例中,旋转绝缘体212可含有不同类型的绝缘材料的混合物或组合。举例来说,旋转绝缘体212可包括玻璃或陶瓷和塑料的组合。另外或替代地,旋转绝缘体212可含有其表面上的绝缘涂层。绝缘涂层可包括与所述绝缘材料相同的材料或不同的材料。借助于实例,旋转绝缘体212可包括由玻璃、塑料、瓷、合成树脂、纸、铁氟龙(teflon)、橡胶(天然和/或合成)、pvc和/或其组合制成的绝缘材料和/或绝缘涂层。
77.旋转绝缘体212可绕其中心轴线旋转对称。然而,在一些实施例中,为有助于扭转或旋转能量从轴208传递到刀具216,旋转绝缘体212可包括与轴208的界面上(例如,旋转绝缘体212的近侧上)和/或与刀具216的界面上(例如,旋转绝缘体212的远侧上)的一个或多个平坦部。举例来说,在一些实施例中,旋转绝缘体212可包括内六角以接纳轴208和钻头
216中的任一个或两个的六角形末端。其它形状可替代地用于防止旋转绝缘体212相对于轴208和/或刀具216滑动。
78.手术工具200的刀具216至少部分地定位于手术工具200的壳体224中且包括连接到旋转绝缘体212的近侧末端和伸出壳体224的远侧末端。刀具216配置成响应于来自旋转绝缘体212的旋转移动而旋转。刀具216的远侧末端为手术程序的执行者提供一种形式的机械效用。举例来说,在一些实施例中,刀具216的远侧末端可以是配置成有助于钻透解剖组织的钻头。
79.刀具216的远侧末端不限于上文所提及的钻头,且可利用刀具216的远侧末端的其它类型、形状和/或形式。刀具216的远侧末端可设计、塑形或以其它方式形成以钻取、锉刺、剃刮、锯切、切割、绞孔、穿透和/或攻丝穿过解剖组织。在一些实施例中,刀具216的尺寸可例如取决于手术程序的类型、外科医生偏好和/或其组合而改变。因此,手术工具200可设计成容纳和接受各种刀具大小、形状和形式。举例来说,刀具216可在一些实施例中从壳体的近侧末端延伸小于一英寸,或一英寸与两英寸之间,或两英寸与五英寸之间,或五英寸与十英寸之间,或超过十英寸。在一些实施例中,手术工具200可配置成接受超过一个刀具216(尽管不在同一时间),其中每一刀具具有不同远侧末端形状,但类似近侧末端形状。举例来说,第一刀具可以是锯子,而第二刀具可以是钻子;第一和第二刀具可具有不同远侧末端形状(即,分别对应于锯子和钻子),但可具有类似近侧末端形状(例如,使得近侧末端接纳于旋转绝缘体212中的形状),使得手术工具200配置成接受第一或第二刀具而不需要任何显著重新配置。在一些实施例中,刀具216的远侧末端可设计成选择性地针对不同形式的解剖组织。举例来说,刀具216的远侧末端可以是设计成切断骨骼的锯子。
80.如图2中所示出,手术工具200具有围绕刀具216周向安置的绝缘支撑件220。绝缘支撑件220支撑壳体224内的刀具216(因此帮助确保刀具216围绕其中心轴线旋转且因此有助于其恰当使用),且防止刀具216与壳体224直接接触(因此确保刀具216与壳体224电隔离,以便保护例如手术工具200的用户免受可能的电击)。绝缘支撑件220可包括与旋转绝缘体212的材料相同的材料或类似的材料。绝缘支撑件220可以是刚性或柔性的,且可为手术工具200内的刀具216的对准提供结构支撑且辅助所述刀具的对准。
81.手术工具200的rf引线228与刀具216接触且径向地定位于周向安置的绝缘支撑件220内。rf引线228为刀具216提供电接触,从而允许电流流动到刀具216。rf引线228连接到延伸穿过壳体224且延行到手术工具200的近侧末端的导线232。导线232与壳体224电绝缘,使得壳体224并不传导流动通过导线232的电。导线232准许从电源到rf引线228的电流流动,且因此,允许手术工具200用于执行单极电外科手术。在一些实施例中,rf引线228可从刀具216可回缩。在此类实施例中,当刀具216由马达204供电时,rf引线228可处于回缩位置中,使得当刀具216在运动中时rf引线228并不与刀具216接触。在手术工具200切换到使用单极电外科手术后,rf引线228可从回缩位置移动到延伸位置。在延伸位置中,rf引线228可与刀具216接触,从而允许手术工具200用于执行单极电外科手术。
82.在其它实施例中,rf引线228可保持与刀具216接触,而不管手术工具200是否用于单极电外科手术。在此类实施例中,当手术工具200的操作员不将手术工具200用于电外科手术时,物理开关可用于防止电无意中流动到rf引线228和钻头216。同样在此类实施例中,rf引线228可朝向钻头216偏置,使得由钻头216和rf引线228的接触引起的耗损并不打断钻
头216与rf引线228之间的连接。举例来说,弹簧可放置在绝缘支撑件220与rf引线228之间,以便将rf引线228朝向钻头216推送。rf引线228可以是或包括金属或任何其它导电材料,且可形成为刷子、衬垫或适合于促进钻头216与rf引线228之间的接触的任何其它形状。
83.为执行单极电外科手术,手术工具200的操作员接通连接到导线232的电源。在一些实施例中,接通电源简单地包括建立从电源到导线232的电流流动路径(例如,使用手动或电子开关)。电源能够将执行电外科手术所必要的电流供应到rf引线228且因此供应到刀具216。在一些实施例中,电源可定位于手术工具200外部,其中手术工具200连线到电源。在一些实施例中,电源可定位于手术工具200内,且手术工具200可配备有按钮、开关、杠杆或类似物以准许外科医生或其它操作员启动电源。在一些实施例中,电源的启动可停用马达204,使得刀具216不再平移和/或旋转。在一些实施例中,手术工具200可防止电外科手术的启动直到刀具216的旋转速度低于阈值水平。阈值水平可由计算装置102确定,这可防止电源通过导线232发送电流直到刀具216的旋转速度低于阈值水平。在其它实施例中,手术工具200可能可操作以使用马达204同时驱动刀具216且经由rf引线228将电流提供到刀具216。
84.当电源启动时,电流可流动通过导线232到rf引线228且进入刀具216。为完成电路,返回电极可定位于患者的身体上、周围、附近或内部,使得作为单极电外科手术的所要目标的手术部位沿着从刀具216到返回电极的电流流动路径定位。返回电极完成电路且准许来自刀具216的电流流动通过患者的身体,包含手术部位,且通过返回电极流出。在单极电外科操作完成后,电源可断开(例如,由手术工具200的外科医生或操作员),且马达204可再启动以操作手术工具200的机械效用(即,刀具216的操作)。在一些实施例中,马达204由与rf引线228相同的电源供电,且多位置开关用于控制电源是否仅将电提供到马达204,仅提供到rf引线228,提供到马达224和rf引线228两者,或既不提供到马达224也不提供到rf引线228。
85.如上文所提及,手术工具200可含有开关,其准许外科医生或其它操作员将手术工具200在机械功能与电外科功能之间进行切换。在机械功能期间,马达204引发刀具216中的旋转移动,从而准许刀具216选择性地切割或去除解剖组织。当电外科手术在手术期间为所需的或将是有益的时,外科医生可将手术工具200切换到电外科功能。因此,马达204可切断且刀具216可不再机械操作。手术工具200可随后由外科医生使用以通过将手术工具200定位为使得手术部位在刀具216与返回电极之间来执行单极电外科手术。通过导线232到rf引线228的所得电流可随后穿过刀具216且通过患者到返回电极,从而产生所要电外科效果。
86.在一些实施例中,手术工具200可准许机械功能和电外科手术功能两者同时操作。换句话说,由刀具216执行的机械操作可独立于电外科手术起作用。为执行电外科手术,电源可接通,且电流可仍如上文所描述流动通过手术工具200和患者,同时刀具216仍从马达204接收平移和/或旋转能量。
87.虽然可配备图2的手术工具200以执行单极电外科手术,但手术工具200以及本公开的其它实施例决不限于执行单极电外科手术,且手术工具200可具备额外电极,与rf引线228和刀具216绝缘,以准许手术工具200替代地执行双极电外科手术。
88.图3a和3b分别示出根据本公开的实施例的处于扩展和回缩位置中的手术工具300的工作端的横截面。手术工具300可与手术工具200相同或类似。在一些实施例中,手术工具
300可包括马达、轴和旋转绝缘体以引起刀具304移动。马达可与马达204相同或类似;轴可与旋转轴208相同或类似;且旋转绝缘体可与旋转绝缘体212相同或类似。手术工具300可另外或替代地具有延伸/回缩机构(例如,用于将刀具304从回缩位置移动到延伸位置和/或反之亦然),且具有一个或多个齿轮、螺钉或其它装置以使得刀具204能够从回缩位置移动到延伸位置和/或反之亦然。手术工具300包括刀具304、电导体308、绝缘体312和壳体316。电导体308可以是例如rf导体。在一些实施例中,刀具304可与刀具216相同或大体上类似。换句话说,刀具304可设计成钻取、锉刺、剃刮、锯切、切割、绞孔、穿透和/或攻丝穿过解剖组织。
89.电导体308一起为手术工具300提供电极,这准许手术工具300执行电外科手术。电导体308定位于刀具304的两个相对侧上且枢转地连接到壳体316。电导体308朝向闭合位置偏置,其中当刀具304处于回缩位置中时电导体308彼此接触。电导体308传导经由例如延伸穿过壳体316的导线(图中未示)或通过与壳体316自身接触接收到的电流。在一些实施例中,电导体308一起充当单个电极(例如,当彼此接触时),且对应于部分300的手术工具用于单极电外科手术。在其它实施例中,电导体308的仅一侧连接或可连接到电源,且另一侧仅仅是为了能够在使用手术工具300用于电外科手术期间完全地封闭刀具304。
90.绝缘体312将刀具304与壳体316分离。当手术工具300处于回缩位置中时,如图3b中所示出,刀具304与壳体316之间的分离防止刀具304无意地传导电流。刀具304的电隔离防止电流流动通过刀具304和与其连接的任何组件,改善安全性,且确保电流流动通过电导体308以实现手术工具300的双极电外科手术功能性。绝缘体312亦支撑壳体316内的刀具304,以有助于刀具304围绕其中心轴线旋转,以及防止刀具304接触壳体316。
91.在一些实施例中,绝缘体312可以与旋转绝缘体212相同或类似的方式形成。换句话说,绝缘体312可均一地包括单一绝缘材料。举例来说,在一些实施例中,绝缘体312可完全由塑料形成。替代地,绝缘体312可含有不同类型的绝缘材料的混合物或组合。举例来说,绝缘体312可包括玻璃和塑料的组合。另外或替代地,绝缘体312可含有其表面上的绝缘涂层。绝缘涂层可包括与所述绝缘材料相同或不同的材料。借助于实例,绝缘体312可包括由玻璃、塑料、瓷、合成树脂、纸、铁氟龙、橡胶(天然和/或合成)、pvc和/或其组合制成的绝缘材料和/或绝缘涂层。
92.图3a示出处于延伸位置中的刀具304。在刀具304处于延伸位置中的情况下,手术工具300可与手术工具200相同或类似地操作。也就是说,手术工具300可用于执行机械任务。在延伸位置中,刀具304的近侧末端定位于壳体316内,而刀具304的远侧末端定位于壳体316外部。刀具304的远侧末端可随后与手术部位接触放置且用于执行机械任务或操作,如钻透解剖组织。在一些实施例中,手术工具300可能不能在延伸位置中执行电外科手术。如图3a中所示出,刀具304的远侧末端可延伸到壳体316外部且将电导体308移动到断开位置中。在断开位置中,电导体308彼此分离,这防止电流流动通过所述电导体且去除手术工具300执行电外科手术的能力。电导体308可包括在其面向刀具304的一侧上的非导电面板,使得刀具304与电导体308电绝缘。
93.图3b示出处于回缩位置中的刀具304。在回缩位置中,刀具304的近侧末端和远侧末端两者定位于壳体316内。在刀具304处于回缩位置中的情况下,手术工具300配置成用于电外科手术。在刀具304回缩时,偏置的电导体308返回到闭合位置。在处于闭合位置中时,
电导体308彼此接触,从而形成电流可流动通过的连接。电导体308的闭合位置允许手术工具300用于执行电外科手术。在一些实施例中,手术工具300可具有开关、按钮、杠杆或准许手术工具300的操作员将刀具304从延伸位置回缩的类似物,从而将刀具304置于回缩位置中,使得刀具304可容纳于壳体316内。在其它实施例中,刀具304在手术工具300的操作员将工具切换成电外科手术模式(例如,使用开关、按钮、杠杆或其它用户接口)时自动地回缩,且在手术工具300的操作员将工具切换出电外科手术模式时自动地延伸。
94.在一些实施例中,在手术工具300的机械操作期间,刀具304可用于选择性地切割或去除解剖工具。当电外科手术在手术期间为所需的或将是有益的时,外科医生或其它操作员可将手术工具300切换到电外科功能。因此,手术工具300可断开刀具304的机械功能且将刀具304回缩到回缩位置中。
95.为执行单极电外科手术,当刀具304处于回缩位置中时,手术工具300的操作员可接通连接到电导体308中的一个或两个的电源。替代地,操作员可简单地选择电外科功能,这可使得手术工具300将刀具304回缩且使得电流能够流动到电导体308。电源能够供应必要电流以执行电外科手术。在一些实施例中,电源可定位于手术工具300外部,其中手术工具300可操作地连接到电源。替代地,电源可定位于壳体316内。电源可用于选择性地为手术工具300的马达和手术工具300的电导体308供电。
96.在电源启动后,电导体308传导电流,从而允许单极电外科手术。电流从一个电导体308流动回到返回电极(例如,在患者的身体上、周围、附近或内部定位的电极),从而完成电路。在单极电外科操作完成后,电源可断开(例如,通过手术工具300的外科医生或操作员),且手术工具300可自动地重新配置(或手动地重新配置)以用于机械操作(例如,以准许使用刀具304来执行机械任务),包含通过将刀具304的远侧末端返回到壳体316外部(例如,将刀具304移动到延伸位置)。
97.现参看图4,将根据本公开的至少一个实施例描述手术工具400的远侧末端部分。手术工具400包括刮匙404、工具尖端408、绝缘件412和壳体416。手术工具400的远侧末端部分配置成允许双极电外科手术。
98.刮匙404可具有尖锐工作端且可适用于刮擦或以其它方式清洁患者的解剖表面。刮匙404可包括细长管,或可具有包括管的远侧部分和并非管的近侧部分。在一些实施例中,刮匙404可以是可扩展和可回缩的。
99.工具尖端408可以是本文中所描述的任何工具的尖端,所述工具包含钻头、锉刀、刮刀、解剖刀、绞刀、锯子或丝锥。如图4中所示出的工具尖端408是具有刀片的刮刀的尖端,所述刀片振荡以切除组织。此类刀片例如提供于由美敦力公司(medtronic)提供的midas脊柱刮刀髓核去除套件(spine shaver nucleus removal set)中。在一些实施例中,工具尖端408也可以是可扩展和可回缩的。工具尖端408可能可操作地连接到马达,所述马达可用于选择性地引起工具尖端408旋转或振荡。
100.绝缘件412可为刮匙404和/或工具尖端408提供绝缘。在一些实施例中,材料412可防止前述双极电外科手术外部的刮匙404与工具尖端408之间的无意电连接。
101.在使用手术工具400的期间,壳体416有益地有助于将工具400的组件固持在适当位置,同时将那些组件(但用于刮匙404的工作端和工具尖端408)与解剖结构屏蔽,且反之亦然。壳体416包括电绝缘体以防止电沿着非所要流动路径流动(无论在患者的解剖结构内
或是以其它方式)。壳体416可在一些实施例中是柔性的或在其它实施例中是刚性的。壳体416可具有平滑外部表面以分别有助于手术工具400插入患者的解剖结构中和从患者的解剖结构撤回,且还有助于在手术程序期间(例如,在外科医生操纵手术工具400以用工具尖端408和/或刮匙404来实现对患者的解剖结构的任何所要修改时手术工具400在患者的解剖结构内的旋转或其它移动。
102.为执行双极电外科手术,手术工具400定位成使得刮匙404和工具尖端408接触手术部位。手术工具400随后进入或置于电外科手术模式中。在电外科手术模式中,可在一些实施例中停用与手术工具400相关联的机械功能性。换句话说,停用手术工具400的任何非电外科特征。在一些实施例中,手术工具400可含有有助于电外科手术模式与机械模式之间的转变的按钮、开关、杠杆或类似物。然而,在其它实施例中,手术工具400的机械功能性可仍可用,而手术工具400的电外科手术特征被启动和/或在使用中。
103.在手术工具400进入电外科手术模式后,在一些实施例中,应了解,电流可在两个方向上流动(例如,在其中可使用交流电的应用中)。在其它实施例中,电流可从刮匙404流动通过手术部位且进入工具尖端408。在此类实施例中,电流可在相反方向上流动。换句话说,电流可从工具尖端408流动通过手术部位到刮匙404(例如,在其中可使用直流电的应用中)。
104.在执行电外科程序之后,手术工具400可退出(或被引起退出)电外科模式。电流流动可停止,且手术工具400可转变到适用于执行机械任务的配置。应了解,在一些实施例中,可同时执行电任务和机械任务。在一些实施例中,按钮、开关、杠杆或类似物可再次用于将手术工具400的配置从电外科手术模式改变为机械模式。
105.手术工具130、手术工具200、手术工具300和/或手术工具400中的任何一个或多个可以任何适合方式从一个操作模式转变为另一操作模式(或转变为联合操作模式)。举例来说,在一些实施例中,手术工具可接收用户输入(例如,经由按钮、开关或类似物)以改变手术工具的操作模式。在接收用户输入后,处理器可发送信号以使得手术工具重新配置以用于机械或电外科操作。在此类实施例中,处理器可定位于手术工具中,或可替代地定位于系统(例如,系统100的至少一个处理器104)内。在一些实施例中,处理器可以是两个分离处理器,其中一个处理器定位于系统中,且一个处理器定位于手术工具中。两个分离处理器可基于用户输入而通信,以有助于手术工具的重新配置。
106.在一些实施例中,处理器可利用一个或多个传感器(例如,机器人140的一个或多个传感器,和/或手术工具130、手术工具200、手术工具300和/或手术工具400的一个或多个传感器),且基于从一个或多个传感器收集的数据而发送信号以使得手术工具从一个操作模式转变为联合操作模式,以便重新配置手术工具以用于机械或机电(例如,机械操作和电外科手术的组合)操作。在一些实施例中,手术工具可由用户输入(例如,经由用户按钮、开关或类似物)配置。举例来说,手术工具的用户可切换开关,所述开关可使得手术工具从一个操作模式重新配置为另一操作模式(或联合操作模式,例如机电操作)。在一些实施例中,手术工具可含有多个按钮,其中每一按钮对应于不同操作模式。用户可随后按压按钮以重新配置手术工具的操作模式。
107.图5a示出根据本公开的实施例的手术工具500的侧视图。手术工具500可与手术工具400相同或类似,或反之亦然。手术工具500包括手柄504和壳体560。设置于壳体560上或
内的是控制器508、流体储集器520、刮匙532、脊柱刮刀536、处理器570和电导体552。尽管手术工具500的布局如图5a中所示出,但根据本公开的其它实施例的手术工具可包括比手术工具500更多或更少的组件。处理器570可与处理器104相同或类似。在一些实施例中,例如,流体储集器520可包含围绕其安置的绝缘材料以将流体储集器520与壳体560的组件电隔离。工具500的其它实施例可不包含流体储集器520。举例来说,在一些实施例中,工具500可包括用于将工具500连接到外部流体储集器的一个或多个端口或阀门。
108.壳体560具有可操作地连接到手柄504的远侧部分且从所述远侧部分延伸的近侧末端和在手术程序期间与患者相互作用的远侧末端。手柄504附接到壳体560的近侧末端且允许外科医生更容易地抓握和/或握持手术工具500。在一些实施例中,手柄504可含有用于由操作员较好地握持的凹槽和/或握把。在一些实施例中,手柄504可配置成可操作地附接到机器人140,从而允许手术工具500的受机器人辅助、自动和/或自主的使用。
109.除其它之外,壳体560还含有控制器508。控制器508提供或实现手术工具500的电控制和机械控制,以及手术工具500与例如系统100之间的信号通信。举例来说,当手术工具500处于机械模式中时,控制器508可通知计算装置102驱动器564(下文所描述)正操作且可经由通信接口512请求用于驱动器564的指令以在脊柱刮刀536中生成所要旋转速度或振动频率。在这种情况下,通信接口512可含有处理器,所述处理器可从与指令124相关联的计算装置102接收指令以将手术工具500的驱动器564引导到在特定频率或速度(例如,超声振荡频率)下操作。在其它实施例中,控制器508可自身控制脊柱刮刀536的旋转速度、振动频率或振荡频率,而不与计算装置102或另一外部装置通信或从计算装置102或另一外部装置输入。
110.在一些实施例中,通信接口512可由开关、按钮或适用于允许手术工具500的操作员选择所要操作模式的其它用户接口替换。举例来说,在一些实施例中,通信接口512可由一个或多个按钮替换,其中每一按钮可被按压或以其它方式由手术工具500的操作员选择以改变手术工具500的操作模式。替代地,手术工具500可包括通信接口512和单独用户接口两者,操作员可经由所述单独用户接口选择所要操作模式。
111.在一些实施例中,控制器508可经由通信接口512与机器人140通信。举例来说,如果机器人140正固持手术工具500,那么控制器508可从计算装置102接收指令,以便从机械模式切换到电外科手术。控制器508可随后通过例如将驱动器564断电和发送通过手术工具500的电流以准许执行电外科手术来进行指令。
112.壳体560包括驱动器564、轴568和绝缘体572。驱动器564附接到轴568的近侧末端,且用以振动或振荡轴568。在一些实施例中,驱动器564是磁性超声振动生成器。驱动器564通过将能量传递通过轴568和绝缘体572到脊柱刮刀536来驱动脊柱刮刀536的振荡,从而准许使用手术工具500,例如,以在脊柱手术期间去除髓核物质。在一些实施例中,驱动器564可以是马达,轴568可以是振动轴(或,例如,旋转轴)且绝缘体572可以是振动绝缘体或旋转绝缘体。轴568可与旋转轴208类似或相同地起作用。换句话说,轴568将能量从驱动器564传输到脊柱刮刀536。
113.手术工具500的绝缘体572定位于壳体560内且附接到轴568的远侧末端。绝缘体572将轴568与脊柱刮刀536以物理方式和以电气方式分离。绝缘体572可操作地连接到脊柱刮刀536的近侧末端且将从驱动器564和轴568接收到的能量传递到脊柱刮刀536。
114.绝缘体572由设计成防止电流流经其的绝缘材料构成。在一些实施例中,绝缘体572可与旋转绝缘体212相同或类似。换句话说,绝缘体572可均一地包括单一绝缘材料。举例来说,在一些实施例中,绝缘体572可完全由塑料形成。替代地,绝缘体572可含有不同类型的绝缘材料的混合物或组合。举例来说,绝缘体572可包括玻璃和塑料的组合。另外或替代地,绝缘体572可含有其表面上的绝缘涂层。绝缘涂层可包括与所述绝缘材料相同或不同的材料。借助于实例,绝缘体572可包括由玻璃、塑料、瓷、合成树脂、纸、铁氟龙、橡胶(天然和/或合成)、pvc和/或其组合制成的绝缘材料和/或绝缘涂层。绝缘体572可由并不或将不减弱或以其它方式吸收振动的材料形成,以确保由驱动器564生成的振动递送到脊柱刮刀536。
115.在一些实施例中,轴568和绝缘体572两者可包括可耐受由驱动器564生成的振动或振荡的材料。举例来说,轴568和绝缘体572可具有设计成将增加的弹性提供到由驱动器564生成的振动波的材料,和/或设计成减缓、减小或防止手术工具500内的谐振效果的材料。
116.脊柱刮刀536部分地定位于壳体560内且具有可操作地连接到绝缘体572的近侧末端和含有工具尖端540的远侧末端。工具尖端540延伸出壳体560,且有助于在脊柱手术期间去除髓核物质等等。工具尖端540接收由驱动器564生成的振动或振荡,这使得工具尖端540能够用于去除髓核物质等等。在一些实施例中,工具尖端540可含有设计成切除组织的刀片。
117.在一些实施例中,手术工具500可配置成包含不同于脊柱刮刀536、工具尖端540和/或刮匙532的机械组件。举例来说,在一些实施例中,手术工具500的工具尖端可以是本文中所描述的任何工具的尖端,所述工具包含钻头、锉刀、刮刀、解剖刀、绞刀、锯子或丝锥而非脊柱刮刀和/或而非刮匙。在此类实施例中,手术工具500可含有可用于选择性地引起工具尖端旋转或振荡的额外组件(例如,马达、轴、绝缘支撑件等)。
118.脊柱刮刀536由绝缘件548包围。绝缘件548用以使驱动器564、轴568、绝缘体572和脊柱刮刀536与壳体560中的其它组件电绝缘。绝缘件548具有与脊柱刮刀536接触的扩展绝缘部分544。绝缘部分544防止脊柱刮刀536与壳体560中的其它组件以电气方式相互作用且帮助手术工具500的壳体560内的脊柱刮刀536的对准。在一些实施例中,绝缘件548和绝缘部分544可以是足够刚性的以将结构支撑提供到且完全涵盖驱动器564、轴568、绝缘体572和脊柱刮刀536。在一些实施例中,绝缘件548可与绝缘支撑件220相同或类似。
119.在一些实施例中,绝缘件548和绝缘部分544可由与旋转绝缘体212和/或绝缘体572相同的绝缘材料或类似的绝缘材料制成。也就是说,绝缘件548和绝缘部分544可均一地包括单一绝缘材料。举例来说,在一些实施例中,绝缘件548和绝缘部分544可完全由塑料形成。替代地,绝缘件548和绝缘部分544可以是不同类型的绝缘材料的混合物或组合。举例来说,绝缘件548和绝缘部分544可包括玻璃和塑料的组合。另外或替代地,绝缘件548和绝缘部分544可含有其表面上的绝缘涂层。绝缘涂层可包括与所述绝缘材料相同的材料或不同的材料。借助于实例,绝缘件548和绝缘部分544可包括由玻璃、塑料、瓷、合成树脂、纸、铁氟龙、橡胶(天然和/或合成)、pvc和/或其组合制成的绝缘材料和/或绝缘涂层。
120.流体储集器520容纳能够在手术程序期间传递到脊柱刮刀536的流体(例如,生理盐水)。由流体储集器520提供的流体有助于在手术程序期间冲洗患者的手术部位。举例来
说,在椎间盘准备期间,目标手术部位可需要冲洗以避免对脊柱刮刀536和/或工具尖端540的损害,或维持手术部位中或周围的正确流体水平以防止温度升高。在一些实施例中,流体储集器520是设计成将流体提供到手术部位以及从手术部位去除流体的双向系统。流体储集器520可准许双向流体流,且可在其中具有用于容纳用于应用的流体的隔室以及用于容纳从手术部位去除的流体的隔室。可配备工具尖端540以允许经由抽吸从手术部位去除流体。
121.在一些实施例中,手术工具500可配置成在手术工具500的电外科操作期间排出流体。举例来说,当手术工具500配置成用于电外科手术(下文所描述)时,流体储集器520可配置成允许流体流动通过脊柱刮刀536且流出工具尖端540的远侧末端。在一些实施例中,流体储集器520可有助于止血密封(例如,transcollationtm)。如本文中所描述,止血密封是指在手术工具或装置的电外科操作期间流体排出以停止解剖组织中的手术部位处的出血。手术工具500的操作员可在手术部位处执行电外科手术期间通过用信号通知流体储集器520(例如,经由按钮、开关、杠杆或类似物)从其泵送、传递或以其它方式释放流体来有助于止血密封。流体可通过工具尖端540释放,而工具尖端540同时操作为用于电外科手术的电极。所得的流体添加到接受电外科手术的手术部位在手术部位处形成止血,而不产生烟雾或烧焦物。
122.流体储集器520包括管524和传递部分528。管524与传递部分528流体连通,其中传递部分528将流动通过管524的流体从流体储集器520传递到脊柱刮刀536。脊柱刮刀536含有流体流动通过其的中空部分。流体流向手术工具500的远侧末端且通过工具尖端540排出。在一些实施例中,脊柱刮刀536的中空部分可正向偏置,使得流体在远侧方向上流向工具尖端540。
123.在一些实施例中,流体储集器520可含有泵。泵可配置成使流体储集器520中含有的流体移动通过管524且进入传递部分528。在一些实施例中,流体储集器520可包含用于重新填充流体储集器的端口。端口可配置成从手术工具500外部的流体源接收流体。因此,可重新填充流体储集器,使得手术工具500维持足够量的流体。在一些实施例中,流体储集器520可在手术工具500外部,且管524可延伸出手术工具500且将流体储集器520连接到手术工具500。
124.在一些实施例中,如图5b中所示出,流体储集器520和管524可在壳体504外部。在此类实施例中,流体可经由管524从流体储集器520递送到工具尖端540。
125.在一些实施例中,传递部分528可含有防水环和/或防水材料以防止流体进入、接触壳体560中的其它组件或以其它方式与所述其它组件流体连通。防水环可围绕脊柱刮刀536周向安置,这可防止流体从脊柱刮刀536泄漏出。在一些实施例中,传递部分528可含有阀门。阀门可将流体选择性地释放到脊柱刮刀536中。在一些实施例中,阀门由控制器508控制,使得控制器508调节与来自流体储集器520的流体的分散相关的参数(例如,打开时间、打开频率、所释放流体的量)以实现各种受控制流速和流体分散。
126.手术工具500的刮匙532部分地安置于壳体560内。刮匙532包括延伸出壳体560的远侧末端的远侧末端532a,和朝向壳体560的近侧延伸的近侧末端532b。刮匙532连接到导线516,导线516与控制器508电通信。导线516将电流从控制器508传导到刮匙532。在一些实施例中,导线516可以是绝缘的,使得导线516中的任何电流在控制器508与刮匙532之间流
动且防止与壳体560中的其它组件电接触。在一些实施例中,刮匙532可与刮匙404类似或相同。在此类实施例中,刮匙532可具有尖锐工作端且可适用于刮擦或以其它方式清洁患者的解剖表面。
127.手术工具500的电导体552提供用于在控制器508与脊柱刮刀536之间传导电流的电极。虽然刮匙532并不意欲移动且因此可直接附接到导线516,但脊柱刮刀536振动、振荡和/或旋转。尽管此类移动,电导体552的使用确保与脊柱刮刀536的电接触。导线556延行通过绝缘件548以将控制器508连接到电导体552。电导体552和刮匙532准许手术工具500执行双极电外科手术。在一些实施例中,电导体552可与rf引线228相同或类似。在一些实施例中,电导体552可回缩以使得当手术工具500使用脊柱刮刀536和/或刮匙532执行机械操作时,电导体552可处于回缩位置中且不与脊柱刮刀536电接触。当手术工具500执行双极电外科手术时,电导体552可移动到延伸位置且与脊柱刮刀536接触以准许电流流动。
128.为执行双极电外科手术,手术工具500定位成使得刮匙532和工具尖端540接触目标手术部位。外科医生或其它操作员可随后启动手术工具500的电外科模式。在一些实施例中,手术工具500可包括可由手术工具500的操作员使用以用信号通知改变成电外科手术模式的按钮、开关、杠杆或类似物。在一些实施例中,在电外科手术模式中,可停用手术工具500的机械功能性(即,脊柱刮刀536经由驱动器564的操作)。在此类实施例中,控制器508可确认通过断开驱动器564来停用手术工具500的机械功能性。在一些实施例中,控制器508可通过通信接口512将信号发送到计算装置102以指示手术工具500处于电外科手术模式中。
129.在手术工具500已进入或配置成处于电外科手术模式中后,电信号分别通过导线516、556从处理器570发送到刮匙532和电导体552。电流随后流动通过目标手术部位。在一些实施例中,电流可在任一方向上流动;举例来说,电流可从刮匙532流动到工具尖端540且通过电导体552或从电导体552流动通过工具尖端540到刮匙532(例如,在其中可使用直流电的实施例中)。在其它实施例中,应了解,电流可在两个方向上流动(例如,在其中可使用交流电的实施例中)。
130.在执行双极电外科手术之后,手术工具500的操作员可使得手术工具500退出电外科手术模式。控制器508禁止电流流动通过导线516、556,这中断通过目标手术部位的电流流动。在一些实施例中,从电外科手术模式退出可重新启动驱动器564的使用。在一些实施例中,按钮、开关、杠杆或类似物可由手术工具500的操作员使用以用信号通知更改电外科手术模式。
131.在一些实施例中,手术工具500可允许在机械和/或电外科手术模式之外使用刮匙532以通过刮擦来去除解剖组织等等。在此类实施例中,手术工具500可操作为未供电工具。在一些实施例中,在执行任何机械操作(例如,使用刀具的钻取)之前,电外科手术装置(例如,手术工具500的双极电外科手术)可由手术工具500的外科医生或操作员在手术部位上使用。通过在实施手术工具500的机械操作之前将电外科手术应用于解剖组织,解剖组织可在引入机械工具之前由电外科手术松散、软化或以其它方式改变,使得解剖组织更容易由手术工具500的机械操作去除。
132.在一些实施例中,控制器508可与计算装置102通信以向操作员提供用户接口112。用户接口112可向操作员提供手术工具500的不同模式以及在其间切换的选项。举例来说,用户接口112可向用户提供断开模式、刮刀模式、电外科手术模式和机电模式。在手术工具
500处于断开模式中时,无电力可流动到手术工具500,但手术工具500可仍操作为刮板,其中刮匙532能够刮擦、切割、清洁或以其它方式修改解剖组织。当选择刮刀模式(例如,通过用户输入经由按钮、开关或类似物,或经由来自处理器的信号基于从一个或多个传感器收集的数据)时,手术工具500可能够执行机械操作。在刮刀模式中,驱动器564可对脊柱刮刀536供电,从而准许工具尖端540例如去除和/或修改解剖组织。当选择电外科手术模式时,可停用手术工具500的机械操作。举例来说,手术工具500可停用驱动器564(例如,经由由处理器发送的信号),这可在手术工具500处于电外科手术模式中时停止且进一步防止脊柱刮刀536和/或工具尖端540的操作。当手术工具500的操作员选择电外科手术模式时,手术工具500可重新配置或重新配置成准许手术工具500的操作员执行双极电外科手术。当选择机电模式时,手术工具500可重新配置以执行电外科手术和机械操作两者。换句话说,在机电模式中,除了驱动器564引起脊柱刮刀536中的运动或振动之外,工具尖端540和/或刮匙532还可接收电流,使得可在工具尖端540和刮匙532通过目标手术部位的电连接后执行双极电外科手术。驱动器564以及流到脊柱刮刀536和刮匙532两者的电流流动的同时操作可准许手术工具500的操作员同时执行机械操作和电外科手术。
133.前文并不打算将本公开限制于本文中所公开的一种或多种形式。在前述的具体实施方式中,出于简化本公开的目的,将本公开的例如各种特征在一个或多个方面、实施例和/或配置中聚集在一起。本公开的方面、实施例和/或配置的特征可在除上文所论述的那些之外的替代性方面、实施例和/或配置中组合。不应将本公开内容的方法解释为反映以下意图:权利要求需要比每个权利要求中明确叙述的更多的特征。相反,如以下权利要求书所反映,本发明方面在于少于单个前述公开的方面、实施例和/或配置的全部特征。因此,将以下权利要求特此并入这个具体实施方式中,其中每个权利要求作为本公开的单独的优选实施例而独立存在。
134.此外,尽管描述已经包含对一个或多个方面、实施例和/或配置以及某些变化和修改的描述,但在理解本公开后,其它变化、组合和修改也在本公开的范围内,例如,如可在本领域的技术人员的技能和知识内。期望获得在准许的范围内包含替代方面、实施例和/或配置的权利,包含所要求保护的替代、可更换和/或等效的结构、功能、范围或步骤,而无论这些替代、可更换和/或等效的结构、功能、范围或步骤是否在本文中公开,且不期望公开用于任何可获专利的主题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。