1.本发明涉及一种飞行器多光谱影像辐射一致性校正方法,属于无人机遥感技术领域。
背景技术:
2.多光谱无人机在农作物的水分、长势、氮素含量和病虫害监测等研究中发挥着重要作用。然而,无人机获取的数据由于环境因素也常常会遇到一些问题,如在多云天气下由于光照度的剧烈变化引起同一架次影像的亮度不均匀。即便是在晴朗无云的天气下,当地面有水体、玻璃和不锈钢等反光地物时,由于拍摄角度的不同,有些影像中会产生耀斑,出现除反光区域外其他区域整体偏暗的现象。这会导致同一地物在不同影像中呈现严重的光谱特征不一致,在后续无人机影像拼接结果中出现地物光谱失真现象。
3.为了提高后续定量化研究的精度,需要对无人机多光谱相机采集的影像进行辐射一致性校正。目前,遥感影像间的辐射一致性校正主要采用直方图匹配法、基于实时照度信息的校正方法、以及基于统计回归的校正方法等。以上方法在校正因光照度变化引起的同一架次影像间辐射信息不一致问题,往往达到相对良好的效果。但是,当存在地物反光造成的低照度影像时,由于影像整体对比度低、可视化细节少、平均亮度低,无法用人工或算法选取足够的高质量样本集,因而上述方法在处理这类影像时效果通常并不理想。
技术实现要素:
4.本发明所要解决的技术问题是提供一种飞行器多光谱影像辐射一致性校正方法,采用全新设计方法,能够克服多变场景,得到可靠的校正结果,并在有效校正影像间辐射信息的同时,尽量去除影像中的噪声点。
5.本发明为了解决上述技术问题采用以下技术方案:本发明设计了一种飞行器多光谱影像辐射一致性校正方法,基于飞行器在各预设飞行高度下分别对目标类型区域拍摄所获得的多光谱参考影像,针对该飞行器在与多光谱参考影像拍摄相同架次飞行、各预设飞行高度下拍摄所获目标类型区域的各幅待校正多光谱影像,实现辐射一致性校正;校正方法包括分别针对各幅待校正多光谱影像,执行如下步骤a至步骤g;
6.步骤a.应用辐射状暗角改正模型对待校正多光谱影像进行暗角改正,更新待校正多光谱影像,然后进入步骤b;
7.步骤b.针对待校正多光谱影像进行直方图对比度拉伸处理,获得待校正多光谱拉伸影像,然后进入步骤c;
8.步骤c.识别待校正多光谱拉伸影像中的各个特征点,并提取该各特征点分别所对应的特征向量,然后进入步骤d;
9.步骤d.基于预先按步骤c方法所获与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中的各个特征点、以及该各特征点分别所对应的特征向量,通过两两特征点之间欧式距离的比较,获得待校正多光谱拉伸影像中与该多光谱参考影像中彼此相匹配的
各个特征点组,进而获得相对应的各个特征点位置组,然后进入步骤e;
10.步骤e.分别针对各个特征点位置组,获得与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中对应特征点位置组中相应位置的像素值,作为参考像素值,以及获得待校正多光谱影像中对应特征点位置组中相应位置的像素值,作为待校正像素值,并由待校正像素值与参考像素值组合构成该特征点位置组所对应的像素拟合样本组;进而获得各特征点位置组分别所对应的像素拟合样本组,然后进入步骤f;
11.步骤f.基于各像素拟合样本组中待校正像素值与参考像素值之间的对应关系,按预设拟合方法,针对预设模型进行数据拟合,构成飞行器对应与待校正多光谱影像的飞行高度的影像辐射一致性校正模型,然后进入步骤g;
12.步骤g.应用影像辐射一致性校正模型,针对待校正多光谱影像中各个位置的像素值进行校正更新,获得待校正多光谱影像所对应的多光谱校正影像,然后进入步骤h;
13.步骤h.针对多光谱校正影像进行双边滤波处理,更新多光谱校正影像。
14.作为本发明的一种优选技术方案:基于目标类型区域中地势平坦、远离水域、且没有阴影的区域的地面上放置定标板,由飞行器在各预设飞行高度下分别对该区域进行多光谱拍摄,获得目标类型区域分别对应各预设飞行高度下的多光谱参考影像,并针对各多光谱参考影像,应用辐射状暗角改正模型对多光谱参考影像进行暗角改正,更新各幅多光谱参考影像。
15.作为本发明的一种优选技术方案:所述步骤b包括步骤b1至步骤b3如下:
16.步骤b1.统计待校正多光谱影像中各个不同像素值分别所对应像素点的个数,并通过该个数与待校正多光谱影像中像素点总个数的比值,构成该各个不同像素值分别所对应的像素点占比,再分别针对该各个不同像素值,获得不大于像素值的各像素值分别所对应像素点占比之和,作为该像素值所对应的累计像素点占比,进而获得该各个不同像素值分别所对应的累计像素点占比,然后构建横坐标为像素值、纵坐标为累计像素点占比的直方图,并进入步骤b2;
17.步骤b2.基于直方图中的各个累计像素点占比,应用截断值比较方法,获得待校正多光谱影像中各不同像素值中的下像素值、上像素值,然后进入步骤b3;
18.步骤b3.应用下像素值、上像素值分别替换用于对待校正多光谱影像进行对比度拉伸所涉及公式中最大像素值、最小像素值,进而针对待校正多光谱影像进行对比度拉伸,获得待校正多光谱拉伸影像,然后进入步骤c。
19.作为本发明的一种优选技术方案:所述步骤b2为如下步骤b2-i;
20.步骤b2-i.基于直方图中的各个累计像素点占比,结合预设占比截断值a、以及b=100%-a,判断是否存在与a相等的累计像素点占比,是则以该累计像素点占比作为目标累计像素点占比,否则选择与a最接近的累计像素点占比作为目标累计像素点占比;同时,判断是否存在与b相等的累计像素点占比,是则以该累计像素点占比作为目标累计像素点占比,否则选择与b最接近的累计像素点占比作为目标累计像素点占比;然后获得该两个目标累计像素点占比分别所对应的像素值,由所获该两个像素值中的小像素值作为下像素值、大像素值作为上像素值,然后进入步骤b3。
21.作为本发明的一种优选技术方案:所述步骤b2-i中,当预设占比截断值a小于50%的情况下:
22.若与a最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的小累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为下像素值;
23.若与b最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的大累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为上像素值;
24.当预设占比截断值a大于50%的情况下:
25.若与a最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的大累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为上像素值;
26.若与b最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的小累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为下像素值。
27.作为本发明的一种优选技术方案:所述步骤b2为如下步骤b2-ii;
28.步骤b2-ii.基于直方图中由小至大排序的各个累计像素点占比,并获得累计像素点占比的个数n,结合预设小于50%的百分比阈值c,按选择顺序第d个累计像素点占比,作为目标累计像素点占比,以及选择倒数第d个累计像素点占比,作为目标累计像素点占比,并获得该两个目标累计像素点占比分别所对应的像素值,由所获该两个像素值中的小像素值作为下像素值、大像素值作为上像素值,然后进入步骤b3。
29.作为本发明的一种优选技术方案:所述步骤b3中,应用下像素值、上像素值分别替换如下用于对待校正多光谱影像进行对比度拉伸所涉及公式中最大像素值b、最小像素值a,
[0030][0031]
进而通过上述公式针对待校正多光谱影像中各像素点的像素值进行更新,实现对待校正多光谱影像进行对比度拉伸,获得待校正多光谱拉伸影像,其中,f(x,y)表示待校正多光谱影像中(x,y)位置像素点的像素值,g(x,y)表示针对待校正多光谱影像中(x,y)位置像素点像素值进行更新后的像素值,c、d分别为0和255。
[0032]
作为本发明的一种优选技术方案:所述步骤c中应用sift算法,执行步骤c1至步骤c5如下:
[0033]
步骤c1.基于影像中像素点的像素值,应用高斯函数对待校正多光谱拉伸影像进行模糊、以及降采样处理,构建图像高斯金字塔,然后进入步骤c2;
[0034]
步骤c2.在获得的高斯差分金字塔空间中,分别针对各个像素点,像素点同其相邻8个像素点、以及相邻上下层中2
×
9=18个点共26个点进行比较,如果该像素点均为最大或最小,则将其作为局部关键点;进而获得各个局部关键点,然后进入步骤c3;
[0035]
步骤c3.基于各个局部关键点,通过拟合三维二次函数来精确确定各局部关键点的位置和尺度,同时根据harris算法检测出边缘响应点,从全部局部关键点中去除,进而获
得待校正多光谱拉伸影像中的特征点,然后进入步骤c4;
[0036]
步骤c4.分别针对待校正多光谱拉伸影像中的各个特征点,获得特征点分别与其各方向上相邻像素点之间的梯度,并选择其中最大梯度所对应像素点的方向,作为该特征点所对应的方向;进而获得各个特征点分别所对应的方向,然后进入步骤c5;
[0037]
步骤c5.分别针对待校正多光谱拉伸影像中的各个特征点,以特征点所对应的方向、该特征点在影像中的位置、该特征点分别与其各方向上相邻像素点之间的梯度,构成该特征点所对应的特征向量;进而获得待校正多光谱拉伸影像中各个特征点分别所对应的特征向量。
[0038]
作为本发明的一种优选技术方案:所述步骤d中,基于预先按步骤c方法所获与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中的各个特征点、以及该各特征点分别所对应的特征向量,分别针对待校正多光谱拉伸影像中的各个特征点,将特征点作为待选特征点,并执行如下步骤d1至步骤d2,实现该多光谱参考影像中与待选特征点相匹配的特征点的查找,获得待校正多光谱拉伸影像中与该多光谱参考影像中彼此相匹配的各个特征点组,以及相对应的各个特征点位置组,然后进入步骤e;
[0039]
步骤d1.通过基于特征点所对应特征向量,获得两两特征点之间欧氏距离的方法,获得待选特征点分别与该多光谱参考影像中各特征点之间的欧氏距离,并获得其中最近距离与次近距离之间的比值,然后进入步骤d2;
[0040]
步骤d2.判断该比值是否小于预设距离比值阈值,是则判定待选特征点与最近距离所对应该多光谱参考影像中的特征点彼此相匹配,构成一组特征点,并获得相对应的该组特征点位置;否则判定该多光谱参考影像中没有与待选特征点相匹配的特征点。
[0041]
作为本发明的一种优选技术方案:所述步骤f中,基于各像素拟合样本组中待校正像素值与参考像素值之间的对应关系,按随机抽样一致性算法ransac,针对预设模型进行数据拟合,构成飞行器对应与待校正多光谱影像的飞行高度的影像辐射一致性校正模型。
[0042]
本发明所述一种飞行器多光谱影像辐射一致性校正方法,采用以上技术方案与现有技术相比,具有以下技术效果:
[0043]
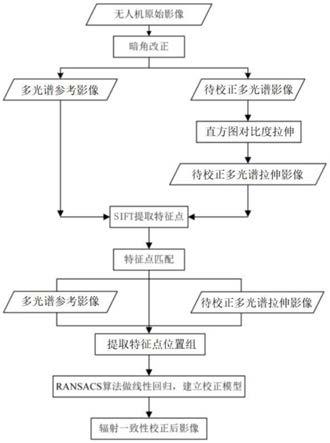
(1)本发明所设计飞行器多光谱影像辐射一致性校正方法,先执行暗角改正;再对影像做直方图对比度拉伸;接着利用sift(scale invariant feature transform)算子对参考影像和直方图对比度拉伸后的影像做特征匹配,得到匹配点对;然后基于匹配点对的像素值,根据ransac(random sample consensus)算法做线性回归,建立线性校正模型;最后应用线性校正模型,对待校正影像做辐射一致性校正,并对校正后的影像做双边滤波,去除噪声点;设计方案克服了传统校正方法因不能有效的在低照度影像中获取足量同名点,而无法开展影像间辐射信息校正的弊端;同时该建模方法具有较强的鲁棒性,有效的抵抗影像中的噪声点干扰,能够使得一个架次内的上千张无人机影像辐射条件趋于一致,消除因地物强反光和光照强度剧烈变化造成的影像失真问题;从而为后续遥感定量化研究提供坚实的数据支撑;
[0044]
(2)本发明所设计飞行器多光谱影像辐射一致性校正方法,将暗角校正引入无人机多光谱影像的辐射一致性校正中,有效的减弱了单幅影像由于相机镜头原因造成的辐射条件不均一问题,并且将图像增强算法与sift图像配准算法相结合,在面对不同天气条件和地理环境下获取的无人机多光谱影像,都能为辐射一致性校正模型提供足够的样本;此
外设计中基于ransac算法建立的校正模型,有效的剔除了样本集中的粗差,提高了模型精度。
附图说明
[0045]
图1是本发明所设计飞行器多光谱影像辐射一致性校正方法的流程图;
[0046]
图2是本发明设计应用实施例中待校正多光谱影像示意图;
[0047]
图3是本发明设计应用实施例中多光谱参考影像示意图;
[0048]
图4是本发明设计应用实施例中校正后多光谱校正影像的示意图。
具体实施方式
[0049]
下面结合说明书附图对本发明的具体实施方式作进一步详细的说明。
[0050]
本发明所设计一种飞行器多光谱影像辐射一致性校正方法,基于飞行器在各预设飞行高度下分别对目标类型区域拍摄所获得的多光谱参考影像,针对该飞行器在与多光谱参考影像拍摄相同架次飞行、各预设飞行高度下拍摄所获目标类型区域的各幅待校正多光谱影像,实现辐射一致性校正。
[0051]
应用中,关于多光谱参考影像,基于目标类型区域中地势平坦、远离水域、且没有阴影的区域的地面上放置定标板,由飞行器在各预设飞行高度下分别对该区域进行多光谱拍摄,获得目标类型区域分别对应各预设飞行高度下的多光谱参考影像,并针对各多光谱参考影像,应用辐射状暗角改正模型对多光谱参考影像进行暗角改正,更新各幅多光谱参考影像。
[0052]
校正方法包括分别针对各幅待校正多光谱影像,按图1所示,执行如下步骤a至步骤g。
[0053]
步骤a.应用辐射状暗角改正模型对待校正多光谱影像进行暗角改正,更新待校正多光谱影像,然后进入步骤b。
[0054]
步骤b.针对待校正多光谱影像进行直方图对比度拉伸处理,获得待校正多光谱拉伸影像,然后进入步骤c。
[0055]
实际应用当中,上述步骤b具体执行如下步骤b1至步骤b3。
[0056]
步骤b1.统计待校正多光谱影像中各个不同像素值分别所对应像素点的个数,并通过该个数与待校正多光谱影像中像素点总个数的比值,构成该各个不同像素值分别所对应的像素点占比,再分别针对该各个不同像素值,获得不大于像素值的各像素值分别所对应像素点占比之和,作为该像素值所对应的累计像素点占比,进而获得该各个不同像素值分别所对应的累计像素点占比,然后构建横坐标为像素值、纵坐标为累计像素点占比的直方图,并进入步骤b2。
[0057]
步骤b2.基于直方图中的各个累计像素点占比,应用截断值比较方法,获得待校正多光谱影像中各不同像素值中的下像素值、上像素值,然后进入步骤b3。
[0058]
具体实施中,针对这里的步骤b2设计了两种不同的方式,实现待校正多光谱影像中各不同像素值中的下像素值、上像素值的获得。
[0059]
第一种方式,即执行步骤b2-i,基于直方图中的各个累计像素点占比,结合预设占比截断值a、以及b=100%-a,判断是否存在与a相等的累计像素点占比,是则以该累计像素
点占比作为目标累计像素点占比,否则选择与a最接近的累计像素点占比作为目标累计像素点占比;同时,判断是否存在与b相等的累计像素点占比,是则以该累计像素点占比作为目标累计像素点占比,否则选择与b最接近的累计像素点占比作为目标累计像素点占比;然后获得该两个目标累计像素点占比分别所对应的像素值,由所获该两个像素值中的小像素值作为下像素值、大像素值作为上像素值,然后进入步骤b3。
[0060]
上述步骤b2-i中,当预设占比截断值a小于50%的情况下:若与a最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的小累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为下像素值;若与b最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的大累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为上像素值。
[0061]
第一种方式在实际应用中,诸如设定a等于2%,基于直方图中的各个累计像素点占比,结合预设占比截断值2%、以及98%,判断是否存在与a相等的累计像素点占比。
[0062]
当预设占比截断值a大于50%的情况下:若与a最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的大累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为上像素值;若与b最接近的累计像素点占比的个数为2,则选择该两个累计像素点占比中的小累计像素点占比作为目标累计像素点占比,并获得该目标累计像素点占比所对应的像素值,作为下像素值。
[0063]
第二种方式,即执行步骤b2-ii,基于直方图中由小至大排序的各个累计像素点占比,并获得累计像素点占比的个数n,结合预设小于50%的百分比阈值c,按选择顺序第d个累计像素点占比,作为目标累计像素点占比,以及选择倒数第d个累计像素点占比,作为目标累计像素点占比,并获得该两个目标累计像素点占比分别所对应的像素值,由所获该两个像素值中的小像素值作为下像素值、大像素值作为上像素值,然后进入步骤b3。
[0064]
步骤b3.应用下像素值、上像素值分别替换如下用于对待校正多光谱影像进行对比度拉伸所涉及公式中最大像素值b、最小像素值a,
[0065][0066]
进而通过上述公式针对待校正多光谱影像中各像素点的像素值进行更新,实现对待校正多光谱影像进行对比度拉伸,获得待校正多光谱拉伸影像,然后进入步骤c,其中,f(x,y)表示待校正多光谱影像中(x,y)位置像素点的像素值,g(x,y)表示针对待校正多光谱影像中(x,y)位置像素点像素值进行更新后的像素值,c、d分别为0和255。
[0067]
步骤c.识别待校正多光谱拉伸影像中的各个特征点,并提取该各特征点分别所对应的特征向量,然后进入步骤d。
[0068]
实际应用中,上述步骤c中应用sift算法,具体执行步骤c1至步骤c5如下。
[0069]
步骤c1.基于影像中像素点的像素值,应用高斯函数对待校正多光谱拉伸影像进行模糊、以及降采样处理,构建图像高斯金字塔,然后进入步骤c2。
[0070]
步骤c2.在获得的高斯差分金字塔空间中,分别针对各个像素点,像素点同其相邻8个像素点、以及相邻上下层中2
×
9=18个点共26个点进行比较,如果该像素点均为最大或
最小,则将其作为局部关键点;进而获得各个局部关键点,然后进入步骤c3。
[0071]
步骤c3.基于各个局部关键点,通过拟合三维二次函数来精确确定各局部关键点的位置和尺度,同时根据harris算法检测出边缘响应点,从全部局部关键点中去除,进而获得待校正多光谱拉伸影像中的特征点,然后进入步骤c4。
[0072]
步骤c4.分别针对待校正多光谱拉伸影像中的各个特征点,获得特征点分别与其各方向上相邻像素点之间的梯度,并选择其中最大梯度所对应像素点的方向,作为该特征点所对应的方向;进而获得各个特征点分别所对应的方向,然后进入步骤c5。
[0073]
步骤c5.分别针对待校正多光谱拉伸影像中的各个特征点,以特征点所对应的方向、该特征点在影像中的位置、该特征点分别与其各方向上相邻像素点之间的梯度,构成该特征点所对应的特征向量;进而获得待校正多光谱拉伸影像中各个特征点分别所对应的特征向量。
[0074]
步骤d.基于预先按步骤c方法所获与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中的各个特征点、以及该各特征点分别所对应的特征向量,通过两两特征点之间欧式距离的比较,获得待校正多光谱拉伸影像中与该多光谱参考影像中彼此相匹配的各个特征点组,进而获得相对应的各个特征点位置组,然后进入步骤e。
[0075]
实际执行设计中,上述步骤d中,基于预先按步骤c方法所获与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中的各个特征点、以及该各特征点分别所对应的特征向量,分别针对待校正多光谱拉伸影像中的各个特征点,将特征点作为待选特征点,并执行如下步骤d1至步骤d2,实现该多光谱参考影像中与待选特征点相匹配的特征点的查找,获得待校正多光谱拉伸影像中与该多光谱参考影像中彼此相匹配的各个特征点组,以及相对应的各个特征点位置组,然后进入步骤e。
[0076]
步骤d1.通过基于特征点所对应特征向量,获得两两特征点之间欧氏距离的方法,获得待选特征点分别与该多光谱参考影像中各特征点之间的欧氏距离,并获得其中最近距离与次近距离之间的比值,然后进入步骤d2。
[0077]
步骤d2.判断该比值是否小于预设距离比值阈值,是则判定待选特征点与最近距离所对应该多光谱参考影像中的特征点彼此相匹配,构成一组特征点,并获得相对应的该组特征点位置;否则判定该多光谱参考影像中没有与待选特征点相匹配的特征点。
[0078]
步骤e.分别针对各个特征点位置组,获得与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中对应特征点位置组中相应位置的像素值,作为参考像素值,以及获得待校正多光谱影像中对应特征点位置组中相应位置的像素值,作为待校正像素值,并由待校正像素值与参考像素值组合构成该特征点位置组所对应的像素拟合样本组;进而获得各特征点位置组分别所对应的像素拟合样本组,然后进入步骤f。
[0079]
步骤f.基于各像素拟合样本组中待校正像素值与参考像素值之间的对应关系,按随机抽样一致性算法ransac,针对预设模型进行数据拟合,构成飞行器对应与待校正多光谱影像的飞行高度的影像辐射一致性校正模型,然后进入步骤g。
[0080]
步骤g.应用影像辐射一致性校正模型,针对待校正多光谱影像中各个位置的像素值进行校正更新,获得待校正多光谱影像所对应的多光谱校正影像,然后进入步骤h。
[0081]
步骤h.针对多光谱校正影像进行双边滤波处理,更新多光谱校正影像。
[0082]
将本发明所设计飞行器多光谱影像辐射一致性校正方法,应用于实际当中,在有
水域的柑橘种植园,使用大疆精灵4多光谱无人机(phantom4-multispectral,p4m),于中午14:00左右晴天无云天气下飞行,飞行高度为120m,所拍摄影像的旁向和航向重叠率分别设定为60%和80%,相机ae设置为解锁状态;按所设计一致性校正方法,具体执行如下步骤:
[0083]
步骤a、应用辐射状暗角改正模型对如图2所示p4m获取的多光谱影像进行暗角改正,更新多光谱影像。其中辐射状暗角改正模型定义如下式:
[0084]
l(x,y)=v(x,y)
×
p(x,y)
[0085]
其中(x,y)为多光谱影像中像素的坐标,l(x,y)为多光谱影像经暗角改正后(x,y)坐标的像素值,v(x,y)为暗角补偿的增益函数定义如下式:
[0086]
v(x,y)=1 k0r k1r2 .... k4r5 k5r6[0087]
其中,k0,k1,....,k4,k5为光学参数,这些和硬件相关的参数由厂商给定,可以在影像元数据信息中读取,r为多光谱影像中(x,y)坐标像素点到补偿中心的像素距离,计算公式如下所示:
[0088][0089]
其中centerx和centery是暗角补偿的影像中心。
[0090]
步骤b、针对待校正多光谱影像进行直方图对比度拉伸处理,获得待校正多光谱拉伸影像。其中直方图对比度拉伸算法定义如下:
[0091][0092]
式中:f(x,y)表示待校正多光谱影像中(x,y)位置像素点的像素值,g(x,y)表示针对待校正多光谱影像中(x,y)位置像素点像素值进行更新后的像素值,a、b分别为原始影像像素值值的最小值和最大值,将预设占比截断值a设置为2%,因此c、d值为累计直方图中2%和98%对应的像素值。
[0093]
步骤c、利用sift算法识别待校正多光谱拉伸影像中的各个特征点,并提取该各特征点分别所对应的特征向量。
[0094]
步骤d、基于图3所示多光谱参考影像,结合预先按步骤c方法所获与待校正多光谱影像所对应飞行高度相同的多光谱参考影像中的各个特征点,获得待校正多光谱拉伸影像中与该多光谱参考影像中彼此相匹配的各个特征点组;其中,待校正多光谱拉伸影像的某一特征点与该多光谱参考影像间的最近邻特征点欧氏距离与次近邻特征点欧氏距离比值阈值设定为0.5,即小于0.5,认为两特征点彼此相匹配,构成一组特征点对,并获得相对应的该组特征点位置;否则判定该多光谱参考影像中没有与待校正多光谱拉伸影像中特征点相匹配的特征点。
[0095]
步骤e.分别针对步骤d获得的特征点位置组,提取参考影像特征点位置组中相应位置的像素值,作为参考像素值,以及提取待校正影像中对应特征点位置组中相应位置的像素值,作为待校正像素值,并由待校正像素值与参考像素值组合构成该特征点位置组所对应的像素拟合样本组;进而获得各特征点位置组分别所对应的像素拟合样本组。
[0096]
步骤f.基于各像素拟合样本组中待校正像素值与参考像素值之间的对应关系,按ransac算法做线性回归,建立待校正影像与参考影像辐射一致性校正模型。
[0097]
本实施例中,所述步骤f具体包括以下操作步骤:
[0098]
f1随机选择一定数量的样本作为内点;
[0099]
f2计算适合内点的模型;
[0100]
f3用模型测试其他所有的点,把落在给定范围内的点放入内点集;
[0101]
f4记录内点个数;
[0102]
f5重复以上步骤多次;
[0103]
f6将内点数量最多的模型作为最终的回归模型,其中模型函数如下式:
[0104]
yi=kxi b i=1,2,3,...,n
[0105]
其中,xi为第i个像素拟合样本组中的待校正像素值,yi为第i个像素拟合样本组中的参考像素值,n为像素拟合样本组的总数。
[0106]
步骤g.应用影像辐射一致性校正模型,针对待校正多光谱影像中各个位置的像素值进行校正更新,获得待校正多光谱影像所对应的多光谱校正影像。
[0107]
步骤h.针对多光谱校正影像进行双边滤波处理,更新多光谱校正影像,如图4所示。其中双边滤波模型定为如下式:
[0108][0109]
其中,(i,j)为影像像素坐标,g(i,j)为(i,j)位置输出像素的像素值,f(k,l)为原始影像(i,j)位置输入滤波器内像素的像素值,(k,l)为滤波器大小,w(i,j,k,l)为加权系数由空域核和值域核的乘积决定:
[0110]
w(i,j,k,l)=d(i,j,k,l)
×
r(i,j,k,l)
[0111]
其中空域核表达式如下:
[0112][0113]
值域核表达式如下:
[0114][0115]
本实施例中所用滤波器大小均为3
×
3,双边滤波空间域标准差σd=10,灰度域标准差σr=30(灰度范围[0~255])。
[0116]
上述技术方案所设计飞行器多光谱影像辐射一致性校正方法,先执行暗角改正;再对影像做直方图对比度拉伸;接着利用sift(scale invariant feature transform)算子对参考影像和直方图对比度拉伸后的影像做特征匹配,得到匹配点对;然后基于匹配点对的像素值,根据ransac(random sample consensus)算法做线性回归,建立线性校正模型;最后应用线性校正模型,对待校正影像做辐射一致性校正,并对校正后的影像做双边滤波,去除噪声点;设计方案克服了传统校正方法因不能有效的在低照度影像中获取足量同名点,而无法开展影像间辐射信息校正的弊端;同时该建模方法具有较强的鲁棒性,有效的抵抗影像中的噪声点干扰,能够使得一个架次内的上千张无人机影像辐射条件趋于一致,消除因地物强反光和光照强度剧烈变化造成的影像失真问题;从而为后续遥感定量化研究提供坚实的数据支撑。
[0117]
并且在实际应用中,将暗角校正引入无人机多光谱影像的辐射一致性校正中,有效的减弱了单幅影像由于相机镜头原因造成的辐射条件不均一问题,并且将图像增强算法与sift图像配准算法相结合,在面对不同天气条件和地理环境下获取的无人机多光谱影像,都能为辐射一致性校正模型提供足够的样本;此外设计中基于ransac算法建立的校正模型,有效的剔除了样本集中的粗差,提高了模型精度。
[0118]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
