1.本公开涉及外科器械,并且更具体地涉及用于密封和切割组织的电外科器械及其制造方法。
背景技术:
2.外科钳是一种钳状器械,该钳状器械依靠其钳口构件之间的机械作用来抓持、夹紧和约束组织。电外科钳利用机械夹紧作用和能量来加热组织以处理例如凝结、烧灼或密封组织。通常,一旦组织被处理,外科医生就必须准确地切除已处理的组织。因此,许多电外科钳被设计成包括在钳口构件之间推进以切除已处理的组织的刀。作为机械刀的替代方案,可以提供基于能量的组织切割元件以使用能量(例如热、电外科、超声、光或其它合适的能量)来切割已处理的组织。
技术实现要素:
3.如本文所用,术语“远侧”是指远离使用者的所述部分,而术语“近侧”是指更靠近使用者的所述部分。此外,在一致的程度上,本文详述的任何或所有方面可以与本文详述的任何或所有其它方面结合使用。
4.根据本公开的多个方面,提供了一种用于外科器械的末端执行器组合件,其包括一对第一钳口构件和第二钳口构件。第一钳口构件和第二钳口构件中的一个或两个可在间隔开的配置和接近的配置之间移动,以在第一钳口构件和第二钳口构件之间抓取组织。第一钳口构件包括具有基本上平坦的面向内的表面的壳体,并且第二钳口构件包括具有沿其中心设置的电外科切割器和远离切割器延伸的一对面向内的倾斜表面的壳体。导电密封板设置在第一钳口构件的壳体上,一对导电密封板在电外科切割器的任一侧上设置在第二钳口构件的壳体上。第一钳口构件的基本上平坦的面向内表面与第二钳口构件的一对面向内的倾斜表面中的一个或两个斜面之间的角度在约1度至约20度的范围内。
5.在根据本公开的多个方面,电外科切割器相对于第二钳口构件的导电密封板升高。在根据本公开的其它方面,电外科切割器相对于第二钳口构件的导电密封板在约0.002英寸至约0.030英寸的范围内突出。在根据本公开的其它方面,电外科切割器将电外科切割器附近的在导电组织密封板之间的间隙保持在约0.001英寸至约0.006英寸的范围内。在根据本公开的其它方面,电外科切割器可以相对于导电密封板凹进或齐平。
6.在根据本公开的多个方面,第二钳口构件的导电密封板的一对面向内的倾斜表面中的每一个的外周表面包括在约0.007英寸至约0.020英寸的范围内的半径,以既促进与第二钳口构件的壳体机械接合又减少沿着第二钳口构件的导电密封板的边缘的电流集中。在根据本公开的其它方面,第一钳口构件的导电密封板的面向内的表面的外周表面包括在约0.007英寸至约0.020英寸的范围内的半径,以既促进与第一钳口构件的壳体机械接合又减少沿着第一钳口构件的导电密封板的边缘的电流集中。在根据本公开的多个方面,半径可以是不导电的以减少沿着其的电流集中。
7.在根据本公开的方面,电外科切割器附近的在第一钳口构件和第二钳口构件的相对导电密封板之间的间隙在约0.001英寸至约0.006英寸的范围内,并且第一钳口构件和第二钳口构件的导电密封板的相对边缘附近的在相对导电密封板之间的间隙在约0.003英寸至约0.020英寸的范围内。
8.在根据本公开的多个方面,电外科切割器围绕第二钳口构件的最远侧末端延伸,以促进组织的电外科解剖。在根据本公开的其它方面,第一钳口构件和第二钳口构件被配置成以尖端偏置的方式闭合。
9.根据本公开的多个方面,提供了一种用于外科器械的末端执行器组合件,其包括一对第一钳口构件和第二钳口构件。第一钳口构件和第二钳口构件中的一个或两个可在间隔开的配置和接近的配置之间移动,用于在第一钳口构件和第二钳口构件之间抓取组织。第一钳口构件包括具有基本上平坦的面向内的表面的壳体,并且第二钳口构件包括具有沿其中心设置的电外科切割器和远离切割器延伸的一对面向内的倾斜表面的壳体。切割器围绕第二钳口构件的最远侧部分延伸并适于连接到电外科能量源。导电密封板设置在第一钳口构件的壳体上。一对导电密封板在电外科切割器的任一侧上设置在第二钳口构件的壳体上。第一钳口构件的导电密封板与第二钳口构件的一对导电密封板中的一个或两个之间的角度在约1度至约20度的范围内。
10.在根据本公开的多个方面,第一钳口构件可包括倾斜表面,而第二钳口构件包括平坦表面,其中电外科切割器沿其中心设置。在根据本公开的其它方面,两个钳口构件均包括倾斜表面。在其它实施例中,第一钳口构件包括限定在其中的狭槽,该狭槽被配置成接收从第二钳口延伸的电外科切割器,该切割器被配置成限定钳口构件之间的间隙。在其它实施例中,切割器可以在一个或两个钳口构件内齐平或凹进。
11.在根据本公开的多个方面,电外科切割器相对于第二钳口构件的导电密封板升高。在根据本公开的其它方面,电外科切割器相对于第二钳口构件的导电密封板在约0.002英寸至约0.010英寸的范围内突出。在根据本公开的其它方面,电外科切割器将电外科切割器附近的在导电组织密封板之间的间隙保持在约0.001英寸至约0.006英寸的范围内。
12.在根据本公开的多个方面,第二钳口构件的导电密封板的一对面向内的倾斜表面中的每一个的外周表面包括在约0.007英寸至约0.020英寸的范围内的半径,以既促进与第二钳口构件的壳体机械接合又减少沿着第二钳口构件的导电密封板的边缘的电流集中。在根据本公开的其它方面,第一钳口构件的导电密封板的面向内的表面的外周表面包括在约0.007英寸至约0.020英寸的范围内的半径,以既促进与第一钳口构件的壳体机械接合又减少沿着第一钳口构件的导电密封板的边缘的电流集中。
13.在根据本公开的多个方面,电外科切割器附近的在第一钳口构件和第二钳口构件的相对导电密封板之间的间隙在约0.001英寸至约0.006英寸的范围内,并且第一钳口构件和第二钳口构件的导电密封板的相对边缘附近的在相对导电密封板之间的间隙在约0.003英寸至约0.020英寸的范围内。
14.在根据本公开的多个方面,第一钳口构件和第二钳口构件被配置成以尖端偏置的方式闭合。
附图说明
15.当结合附图考虑以下详细描述时,本公开的以上和其它方面和特征将变得更加明显,其中相同的附图标记表示相似或相同的元件。
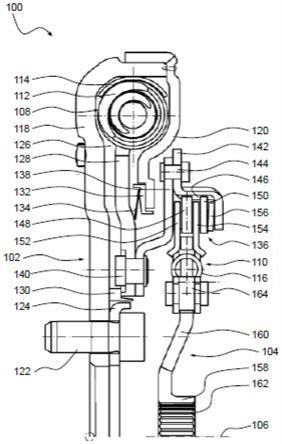
16.图1是根据本公开提供的基于轴的电外科镊子的透视图,其显示为连接到电外科发生器;
17.图2是根据本公开提供的止血式电外科钳子的透视图;
18.图3是根据本公开提供的机器人外科器械的示意图;
19.图4a是末端执行器组合件的第一钳口构件和第二钳口构件处于接近位置的侧视图;
20.图4b是图4a的细节区域的放大视图。
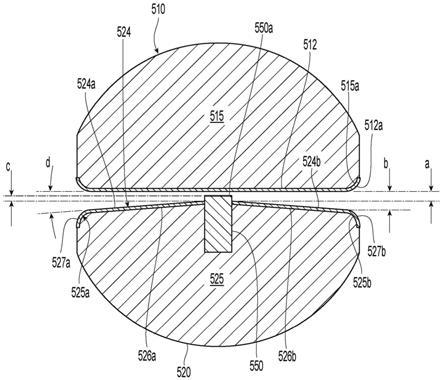
21.图4c是图4a的末端执行器组合件的第一钳口构件和第二钳口构件沿剖面线a-a的端视图,示出了电外科切割机构和第二钳口构件的倾斜设计,以促进组织分离;
22.图5a是现有技术的钳口构件的截面图,示出了涂覆在电外科切割器的任一侧上的密封板;以及
23.图5b是根据本公开的实施例的钳口构件的横截面,示出了粘附到电外科切割器的任一侧的一对密封板。
具体实施方式
24.参考图1,根据本公开提供的基于轴的电外科钳子通常由附图标记10表示。省略了与本公开的理解没有密切关系的镊子10的方面和特征,以避免在不必要的细节上模糊本公开的方面和特征。
25.镊子10包括壳体20、手柄组合件30、触发器组合件60、旋转组合件70、第一启动开关80、第二启动开关90和末端执行器组合件100。镊子10还包括具有配置成(直接或间接)接合末端执行器组合件100的远侧末端部分14和(直接或间接)接合壳体20的近侧末端部分16的轴12。镊子10还包括将镊子10连接到能量源(例如电外科发生器“g”)的缆线“c”。缆线“c”包括延伸穿过其中的电线(或多根电线)(未示出),其具有足够的长度以延伸穿过轴12,以便分别连接到末端执行器组合件100的钳口构件110、120的一个或两个组织处理表面114、124,以向其提供能量。第一启动开关80耦合到组织处理表面114、124和电外科发生器“g”,用于能够选择性地启动对钳口构件110、120的能量供应,以处理例如烧灼、凝结/干燥和/或密封组织。第二启动开关90耦合到钳口构件120的热切割元件130和电外科发生器“g”,以便能够选择性地启动对热切割元件550的能量供应,用于热切割组织(图4c)。
26.镊子10的手柄组合件30包括固定手柄50和可移动手柄40。固定手柄50与壳体20整体相连,手柄40可相对于固定手柄50移动。手柄组合件30的可移动手柄40可操作地联接到驱动组合件(未示出),该驱动组合件一起机械地协作以使末端执行器组合件100的钳口构件110、120中的一个或两个围绕枢轴103在间隔开的位置和接近的位置之间运动,从而在钳口构件110、120的组织处理表面114、124之间抓取组织。如图1所示,可移动手柄40最初与固定手柄50间隔开,并且相应地,末端执行器组合件100的钳口构件110、120设置在间隔开的位置。可移动手柄40可从该初始位置按压到对应于钳口构件110、120的接近位置的按压位置。旋转组合件70包括旋转轮72,其可选择性地向任一方向旋转以相对于壳体20相应地旋
转末端执行器组合件100。
27.参考图2,根据本公开提供的止血式电外科钳子通常由附图标记210表示。省略了与本公开的理解没有密切关系的镊子210的方面和特征,以避免在不必要的细节上模糊本公开的方面和特征。
28.镊子210包括两个细长轴构件212a、212b,每个细长轴构件分别具有近侧末端部分216a、216b和远侧末端部分214a、214b。镊子210被配置成与类似于末端执行器组合件100的末端执行器组合件100'一起使用。更具体地,末端执行器组合件100'包括附接到轴构件212a、212b的相应远侧末端部分214a、214b的第一钳口构件110'和第二钳口构件120'。钳口构件110'、120'绕枢轴103'可枢转地连接。每个轴构件212a、212b包括设置在其近侧末端部分216a、216b处的手柄217a、217b。每个手柄217a、217b限定穿过其中的手指孔218a、218b,用于接收使用者的手指。如可理解的,手指孔218a、218b有助于轴构件212a、212b相对于彼此的运动,从而将钳口构件110'、120'从间隔开的位置枢转到接近的位置,在间隔开的位置处,钳口构件110'、120'相对于彼此以间隔开的关系设置,在接近的位置处,钳口构件110'、120'协作以在其间抓持组织。
29.镊子210的轴构件212a、212b中的一个,例如轴构件212b,包括近侧轴连接器219,该近侧轴连接器219被配置成将镊子210连接到能量源,例如电外科发生器“g”(图1)。近侧轴连接器219将缆线“c”固定到镊子210,使得使用者可以选择性地向钳口构件110'、120'供应能量以治疗组织。更具体地,第一启动开关280用于在轴构件212a、212b充分靠近时,例如,在经由轴构件212a启动第一启动开关280时,向钳口构件110'、120'供应能量以治疗组织。设置在轴构件212a、212b中的一个或两个上的第二启动开关290联接到末端执行器组合件100'的钳口构件110'、120'中的一个的热切割元件(未示出,类似于钳口构件120的热切割元件550(图4c)),并且联接到电外科发生器“g”,以能够选择性地启动向热切割元件的能量供应,用于热切割组织。
30.钳口构件110'、120'限定弯曲配置,其中每个钳口构件类似地相对于末端执行器组合件100'的纵向轴线横向弯曲。然而,也可设想其它合适的弯曲配置,包括朝向钳口构件110、120'中的一个(并因此远离另一个)的弯曲,具有相同平面的多个弯曲和/或不同平面内的多个弯曲。末端执行器组合件100(图1)的钳口构件110、120同样可根据上述任何配置或以任何其它合适的方式弯曲。
31.参考图3,根据本公开提供的机器人外科器械总体上由附图标记1000标识。省略了与本公开的理解无密切关系的机器人外科器械1000的方面和特征,以避免在不必要的细节中模糊本公开的方面和特征。
32.机器人外科器械1000包括多个机器人臂1002、1003;控制装置1004;以及与控制装置1004耦合的操作控制台1005。操作控制台1005可以包括显示装置1006,该显示装置可以被特别设置成显示三维图像;以及手动输入装置1007、1008,外科医生通过手动输入装置1007、1008,能够在第一操作模式下远程操纵机器人臂1002、1003。机器人外科器械1000可以被配置成用于躺在患者手术台1012上的患者1013,以便以微创方式进行治疗。机器人外科器械1000还可以包括数据库1014,特别是耦合到控制装置1004的数据库1014,其中存储例如来自患者1013的手术前数据和/或解剖图。
33.机器人臂1002、1003中的每一个可包括通过接头连接的多个构件,以及附接装置
1009、1011,例如末端执行器组合件1100、1200可分别附接到附接装置1009、1011。末端执行器组合件1100类似于末端执行器组合件100(图4a),但也可考虑其它合适的末端执行器组合件用于联接到附接装置1009上。末端执行器组合件1200可以是任何末端执行器组合件,例如内窥相机、其它外科工具等。机器人臂1002、1003和末端执行器组合件1100、1200可以由连接到控制装置1004的电驱动器(例如马达)驱动。控制装置1004(例如,计算机)可以被配置成尤其借助于计算机程序来激活这些马达,其方式为使得机器人臂1002、1003,它们的附接装置1009、1011,以及末端执行器组合件1100、1200分别根据来自手动输入装置1007、1008的对应输入来执行所希望的移动和/或功能。控制装置1004还可以以调节机械臂1002、1003和/或马达的移动的方式配置。
34.转到图4a-4c,如上所述,末端执行器组合件500包括第一钳口构件510和第二钳口构件520。每个钳口构件510、520可包括支撑导电组织处理板512、524的结构壳体515、525,所述导电组织处理板512、524限定其相应的组织处理表面。在实施例中,组织处理板512、524可以通过任何已知的机械处理或任何已知的机械制造步骤、气相沉积、溅射、包覆成形、粘合剂、机械接口组件等沉积到钳口壳体515、525或钳口插入件(未示出)上。
35.具体参考图4a-4b,钳口构件510、520显示为处于接近位置,其中钳口构件510、520在接近时通常彼此平行。钳口构件510、520以尖端偏置的方式配置,使得当钳口构件510、520接近时,每个钳口构件510、520的尖端510a、520a首先接触。这还允许钳口构件510、520根据组织定向或解剖的需要夹紧组织。在手柄40完全致动之前,钳口构件接近大致平行的方向,其中钳口构件彼此间隔距离“f”。在完全致动时,每个相应钳口构件510、520的尖端510a、520a以尖端偏置的方式接触。尖端偏置“f”的范围可以从大约0.002英寸至约0.020英寸。
36.第一钳口构件510可包括倾斜表面,而第二钳口构件520可包括平坦表面,电外科切割器550沿其中心设置。或者,钳口构件510、520都包括倾斜表面。第一钳口构件510可包括限定在其中的狭槽(未示出),该狭槽配置成接纳从第二钳口520延伸的电外科切割器550,切割器550被配置成限定钳口构件510、520之间的间隙。切割器550可以在一个或两个钳口构件510、520内齐平或凹进。
37.图4c示出了沿着图4a的截面线a-a的截面,详述了钳口构件510、520和电外科切割器550沿着截面的形状。更具体地说,钳口壳体515沿其截面基本上是平的,并被配置成通过任何已知的机械附接方法在其上支承密封板512。密封板512的外周边缘512a可以成形为与钳口壳体515的相应外周边缘515a配合,以促进或增强机械接合,或引导或减少沿其表面的电流集中。边缘515a的半径“e”可以在约0.007英寸至约0.020英寸的范围内。密封板512设置成与切割器550相对,并且可被激励到相反的电势,以提供通过组织(当被抓住时)的电流路径。
38.钳口壳体525至少部分地沿着钳口壳体515的长度与钳口壳体515相对设置,并配置成在其中容纳切割器550。切割550至少部分地沿着钳口壳体525的长度延伸,并且包括尖端551,尖端551延伸通过钳口壳体520的钳口壳体尖端520a,使得切割器尖端551在壳体520的远侧末端处暴露(图4b)。这允许切割器尖端550用于解剖目的。切割器550从组织密封板524a、524b突出或相对于组织密封板524a、524b突出约0.002英寸至约0.010英寸的范围内的距离“c”。
39.钳口壳体525包括倾斜或锥形表面526a、526b,每个倾斜或锥形表面526a、526b远离切割器550朝向钳口壳体525的外周边缘延伸。倾斜表面526a、526b被配置成促进组织的切割和随后的分离。更具体地,每个倾斜表面526a、526b包括角度“d”,该角度有助于组织从切割器550的任一侧上的相应组织密封板524a、524b滑离或脱落。
40.组织密封板524a、524b在切割器550的任一侧上机械地接合到钳口壳体525。更具体地,钳口构件520的密封板524a、524b机械地接合到钳口壳体525,以至少部分地匹配倾斜表面526a、526b的角度。对于倾斜表面526a、526b(和/或密封板524a、524b)可以设想各种角度,并且根据特定目的,可以在约1度至约20度的范围内。当钳口构件510、520接近时,靠近切割器550的间隙“a”在约0.001英寸至约0.006英寸的范围内,并且作为用于血管密封目的的常规止动构件操作。
41.相应组织密封板524a、524b的外周边缘527a、527b可以成形为与钳口壳体525的相应外周边缘525a、525b配合,以促进或增强机械接合,或引导或减少沿其表面的电流集中。边缘525a、525b的半径“e”可以在约0.007英寸至约0.020英寸的范围内。靠近外周边缘(例如密封板512的边缘515a和密封板524的边缘527b)的间隙“b”的范围在约0.003英寸至约0.020英寸之间。半径还可以由非导电材料制成或涂覆有非导电材料以减少电流集中。
42.一旦组织经由开关80的致动而被相应钳口构件510、520的密封板512、524密封,则操作者可启动开关90来激励切割器550(图1和4c)以电外科地切割组织。在切割组织之后,在切割器550的任一侧上的组织密封板524a、524b的倾斜或锥形配置促进组织从切割器550落下,从而使其容易分离。
43.现在参考图5a-5b,示出了上钳口构件610,其中电外科切割器650沿其中心设置在侧向偏移的密封板612a、612b之间。用导电密封和切割表面612a、612b和651涂覆钳口壳体625和切割器650是相对公知的,并且可以涉及各种工艺,例如气相沉积、溅射等。在2020年7月24日提交的共同拥有的美国专利申请序列号63,056,113中描述了各种技术,其全部内容通过引用结合于此。
44.图5b示出了根据本公开的一个实施例,其中密封板712a、712b在切割器750的任一侧机械地附接至壳体725。更具体地,密封板712a、712b可以使用胶水或其它类型的机械接口粘附到壳体725。在各实施例中,密封板712a、712b可以使用包覆成形工艺来附接。例如,可以想到,在形成壳体725之后将密封板712a、712b粘附到壳体725上消除了复杂的制造步骤并且简化了组装过程。在壳体725形成之后,导电表面751也可粘附(或以其它方式附接)到切割器750。
45.钳口构件110、120中的一个或两个可被配置成在组织密封表面和钳口壳体之间包括夹紧调整件(未示出)。经考虑,设计具有某些几何配置的夹紧调整件可以提供额外的益处,以促进密封和/或切割过程。例如,配置具有某些几何特征的夹紧调整件可以在密封或切割的激活过程中包含、限制或重定向烟雾。此外,在切割过程中,夹紧调整件的某些配置可限制来自切割元件的热扩散或散热。更进一步地,夹紧调整件的某些配置可有助于组织一旦被切割就排出。
46.虽然在附图中已经示出了本公开的几个实施例,但并不意味着本公开局限于此,因为意图是使本公开的范围与本领域所允许的一样宽,并且同样地阅读说明书。因此,以上描述不应解释为限制性的,而仅仅是作为特定实施例的例证。所属领域的技术人员将设想
在本文所附权利要求书的范围和精神内的其它修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。