1.本发明涉及家用锅炉装配和焊接设备领域,具体为一种智能装配和焊接家用锅炉的装置及方法。
背景技术:
2.对于家用锅炉的种类有很多,但对于一般锅炉本体是由锅炉框和底板焊接而成。目前锅炉焊接一般是使用小型焊接装置,人工进行操作完成锅炉焊接。虽然工人带有焊接面具,但是时间久了,对工人眼睛还是有害,而且工人也会很疲倦。因此,此岗位工人工资都比较高,使用这种半自动焊接装置,不仅效率低,而且对工人身体有害,成本较高。同时,在高峰期时,由于半自动焊接装置效率低,时常出现出货量低,订单延期等问题。对于半自动焊接装置的购买数量存在较大的成本,购买数量多后再非高峰期会闲置,还需要定期维护,购买数量少又会影响订单数量。因此,需要一种自动化的锅炉焊接装置,能够解决效率低不能应付高峰期的问题,同时将人工省去,避免人工患有职业病。所以需要一种智能装配和焊接家用锅炉的装置及方法。
技术实现要素:
3.针对现有技术存在的不足,本发明目的是提供一种智能装配和焊接家用锅炉的装置及方法,以解决上述背景技术中提出的问题,本发明结构新颖,通过底板送料机构和夹取机构,可以有序的将锅炉框和底板放入特定工作区,通过锅炉固定旋转机构以及底板旋转机构将锅炉框和底板紧紧配合,以及同步旋转,结合机械臂焊接,能够有序将锅炉旋转焊接,即可焊接一圈,也可实现点焊功能。从而实现自动焊接锅炉,并通过夹取机构取出工作位,放入皮带机上。该装置具有结构简单和安全可靠等特点。
4.为了实现上述目的,本发明是通过如下的技术方案来实现:一种智能装配和焊接家用锅炉的装置,包括装置本体,所述装置本体包括底板送料机构、夹取机构、固定旋转机构、底板旋转机构、机械臂焊接机构、锅炉框和底板,所述底板送料机构包括工作位,所述工作位的一侧固定有储料盒,所述储料盒的内部安装有推板,所述推板的底部固定有第一弹簧,所述第一弹簧的底部固定在储料盒的内部,所述储料盒顶部的一侧固定有卡底板机构和卡槽,所述工作位的一侧安装有皮带机,所述工作位的另一侧安装有下一工位皮带机,所述工作位的一侧安装有第一步进电机,所述第一步进电机的顶部安装有第一连接装置,所述第一连接装置上安装有第一电动推杆,所述第一电动推杆上安装有第一吸盘,所述工作位上安装有焊接机构。
5.作为本发明的一种优选实施方式,所述夹取机构包括第三步进电机和第二步进电机,所述第三步进电机和第二步进电机均安装在工作位的顶部,所述第三步进电机上安装有第三连接装置,所述第三连接装置上安装有第三电动推杆,所述第三电动推杆的一端安装有第二电磁夹。
6.作为本发明的一种优选实施方式,所述第二步进电机的顶部安装有第二连接装
置,所述第二连接装置上安装有第二电动推杆,所述第二电动推杆上安装有第一电磁夹。
7.作为本发明的一种优选实施方式,所述下一工位皮带机的一侧安装有第六步进电机,所述第六步进电机上安装有第三位移传感器,所述第六步进电机上安装有挡板,所述第三位移传感器安装在皮带机上。
8.作为本发明的一种优选实施方式,所述固定旋转机构包括第四电动推杆、第二位移传感器、连接件、第四步进电机、第一旋转套筒和第二旋转套筒,所述第二位移传感器安装在第四电动推杆上,所述连接件安装在第四电动推杆的一端,所述第一旋转套筒安装在连接件上,所述连接件上安装有第四步进电机,所述工作位上安装有第二旋转套筒。
9.作为本发明的一种优选实施方式,所述底板旋转机构包括第五步进电机、第五电动推杆、第二吸盘和第四位移传感器,所述第五电动推杆安装在第五步进电机上,所述第四位移传感器安装在第五电动推杆上,所述第二吸盘安装在第五电动推杆上。
10.作为本发明的一种优选实施方式,所述机械臂焊接机构包括第一伺服电机、第二伺服电机、第一机械臂杆、第二机械臂杆和第三伺服电机,所述的第一伺服电机安装在焊接机构底部,所述第二伺服电机与第一机械臂杆一端连接,所述第一机械臂杆另一端与第二机械臂杆连接,所述第二机械臂杆一端与第三伺服电机连接,第二机械臂杆另一端与焊接机构连接。
11.作为本发明的一种优选实施方式,所述储料盒的一侧安装有第一卡板,所述卡底板机构的内部安装有第二弹簧,所述第二弹簧的顶部安装有第二卡板,所述第一电动推杆上安装有第一位移传感器。
12.作为本发明的一种优选实施方式,所述焊接机构包括第一伺服电机,所述第一伺服电机上安装有第二伺服电机,所述第二伺服电机上安装有第一机械臂杆,所述第一机械臂杆上安装有第二机械臂杆。
13.一种智能装配和焊接家用锅炉的方法,包括以下步骤:
14.步骤一:当第三位移传感器的位移值为d,检测到皮带机末端没有锅炉框时,皮带机启动;当第三位移传感器的位移值为x时,安装在皮带机旁边的第六步进电机启动,通过输出轴带动挡板,将皮带机上锅炉框挡住,皮带机停止工作;此时,安装在工作位上的第二步进电机启动,带动第二连接装置,使得第一电磁夹转向锅炉框;通过第二电动推杆将第一电磁夹推向锅炉框,利用第一电磁夹将锅炉框夹住;通过第二电动推杆将锅炉框夹起,利用第二步进电机将锅炉框转向工作位大体位置,第二电动推杆将锅炉框放下后,将第一电磁夹升起。
15.步骤二:启动固定旋转机构中的电动推杆,带动旋转套筒靠近锅炉框,当第二位移传感器的位移值为y,固定旋转机构中的四个旋转套筒刚好能够将一个锅炉框夹住,电动推杆停止运动。
16.步骤三:当第一位移传感器的位移值为z,储料盒中存有底板,并且储料盒中的第一弹簧将底板顶起时,第一步进电机启动,带动第一连接装置,使得第一吸盘与底板同心;通过第一电动推杆将第一吸盘推向底板,当第一位移传感器的位移值为a,,第一吸盘能够吸住底板的距离时,第一电动推杆停止推动,第一吸盘将底板吸住,利用第一电动推杆和第一步进电机,将吸住的底板放入已经固定好的锅炉框中,此时,第一卡板通过卡槽进入储料盒,辅助卡底板机构将底板卡在储料盒中,然后第一电动推杆启动退出工作位。
17.步骤四:安装在工作位下方的第五电动推杆将第二吸盘向上推出,当第四位移传感器的位移值为b,,第二吸盘能够吸住已放入锅炉框中的底板时,第五电动推杆停止推动,使用第二吸盘将底板吸住,利用第五电动推杆将底板向下拉动一段距离能够使锅炉框和底板紧紧配合。
18.步骤五:通过第一伺服电机将焊接机构转向配合好的锅炉本体,利用第二伺服电机和第三伺服电机,带动第一机械臂杆和第二机械臂杆,使焊接机构中焊接棒对准锅炉框和底板配合的圆周边。
19.步骤六:启动第五步进电机,以及固定旋转机构中的步进电机,使得第二吸盘吸住的底板和利用摩擦里可转动的锅炉框,能够进行同步转动,同时,机械臂焊接机构中的焊接机构进行焊接。通过机械臂转动方向,结合锅炉框和底板同步旋转,可以实现点焊以及将圆弧周边满焊,均可实现将锅炉框和底板固定连接。
20.步骤七:当焊接t,能够点焊或者满焊所用时间后,机械臂焊接机构完成焊接后,通过第二、第三伺服电机使机械臂推出工作位。固定旋转装置中的电动推杆启动,将旋转套筒推出工作位,第二吸盘松开底板。
21.步骤八:利用夹取装置,通过第三步进电机和第三电动推杆将第二电磁夹推入锅炉中,利用第二电磁夹将完成焊接的锅炉夹住,在通过第三步进电机和第三电动推杆将夹住的锅炉放入下一工位皮带机上。重复step1-8步骤,直到第一位移传感器的位移值为c,储料盒中没有底板时的位移值,完成一盒底板的装配焊接。
22.本发明的有益效果:本发明的一种智能装配和焊接家用锅炉的装置及方法,包括第二电磁夹;第三电动推杆;第三步进电机;第三连接装置;第二连接装置;第二步进电机;第二电动推杆;第一电磁夹;第二伺服电机;第一伺服电机;卡底板机构;储料盒;第一弹簧;第一步进电机;焊接机构;第一连接装置;第一吸盘;第一电动推杆;第三位移传感器;第六步进电机;第三伺服电机;第二位移传感器;第四电动推杆;第一旋转套筒;连接件;第二旋转套筒;挡板;第二吸盘;第五电动推杆;第五步进电机;第四位移传感器;第二卡板;第二弹簧;第二机械臂杆;第一机械臂杆;第一卡板;推板;工作位;皮带机;下一工位皮带机;第一位移传感器;第四步进电机;卡槽;锅炉框;底板。
23.1.本装置能够实现将锅炉框和底板进行配合,以及装配点焊或满焊。具有结构简单和智能化等特点。
24.2.本装置装配和焊接过程实现自动化,使得工业成本降低,不仅避免了工人接触焊接,影响工人身体健康,也提高产品出货效率。
附图说明
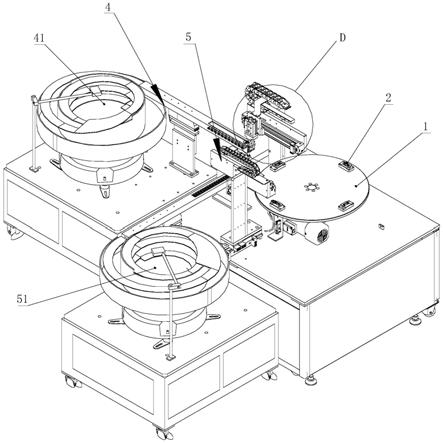
25.图1为本发明一种智能装配和焊接家用锅炉的装置及方法的整体结构示意图;
26.图2为本发明一种智能装配和焊接家用锅炉的装置及方法的隐藏储料盒侧面的整体侧视结构示意图;
27.图3为本发明一种智能装配和焊接家用锅炉的装置及方法的俯视结构示意图;
28.图4为本发明一种智能装配和焊接家用锅炉的装置及方法的底板旋转机构整体的结构示意图;
29.图5为本发明一种智能装配和焊接家用锅炉的装置及方法的卡底板机构整体结构
示意图;
30.图6为本发明一种智能装配和焊接家用锅炉的装置及方法的锅炉框的结构示意图;
31.图7为本发明一种智能装配和焊接家用锅炉的装置及方法的底板的结构示意图;
32.图8为本发明一种智能装配和焊接家用锅炉的装置及方法的a的局部放大结构示意图;
33.图9为本发明一种智能装配和焊接家用锅炉的装置及方法的底板送料机构的俯视结构示意图;
34.图中:1、第二电磁夹;2、第三电动推杆;3、第三步进电机;4、第三连接装置;5、第二连接装置;6、第二步进电机;7、第二电动推杆;8、第一电磁夹;9、第二伺服电机;10、第一伺服电机;11、卡底板机构;12、储料盒;13、第一弹簧;14、第一步进电机;15、焊接机构;16、第一连接装置;17、第一吸盘;18、第一电动推杆;19、第三位移传感器;20、第六步进电机;21、第三伺服电机;22、第二位移传感器;23、第四电动推杆;24、第一旋转套筒;25、连接件;26、第二旋转套筒;27、挡板;28、第二吸盘;29、第五电动推杆;30、第五步进电机;31、第四位移传感器;32、第二卡板;33、第二弹簧;34、第二机械臂杆;35、第一机械臂杆;36、第一卡板;37、推板;38、工作位;39、皮带机;40、下一工位皮带机;41、第一位移传感器;42、第四步进电机;43、卡槽;44、锅炉框;45、底板。
具体实施方式
35.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
36.请参阅图1至图9,本发明提供一种技术方案:一种智能装配和焊接家用锅炉的装置,包括装置本体,所述装置本体包括底板送料机构、夹取机构、固定旋转机构、底板旋转机构、机械臂焊接机构、锅炉框45和底板44,所述底板送料机构包括工作位38,所述工作位38的一侧固定有储料盒12,所述储料盒12的内部安装有推板37,所述推板37的底部固定有第一弹簧13,所述第一弹簧13的底部固定在储料盒12的内部,所述储料盒12顶部的一侧固定有卡底板机构11和卡槽43,所述工作位38的一侧安装有皮带机39,所述工作位38的另一侧安装有下一工位皮带机40,所述工作位38的一侧安装有第一步进电机14,所述第一步进电机14的顶部安装有第一连接装置16,所述第一连接装置16上安装有第一电动推杆18,所述第一电动推杆18上安装有第一吸盘17,所述工作位38上安装有焊接机构15。
37.作为本发明的一种优选实施方式,所述夹取机构包括第三步进电机3和第二步进电机6,所述第三步进电机3和第二步进电机6均安装在工作位38的顶部,所述第三步进电机3上安装有第三连接装置4,所述第三连接装置4上安装有第三电动推杆2,所述第三电动推杆2的一端安装有第二电磁夹1。
38.作为本发明的一种优选实施方式,所述第二步进电机6的顶部安装有第二连接装置5,所述第二连接装置5上安装有第二电动推杆7,所述第二电动推杆7上安装有第一电磁夹8。
39.作为本发明的一种优选实施方式,所述下一工位皮带机40的一侧安装有第六步进电机20,所述第六步进电机20上安装有第三位移传感器19,所述第六步进电机20上安装有
挡板27,所述第三位移传感器19安装在皮带机39上。
40.作为本发明的一种优选实施方式,所述固定旋转机构包括第四电动推杆23、第二位移传感器22、连接件25、第四步进电机42、第一旋转套筒24和第二旋转套筒26,所述第二位移传感器22安装在第四电动推杆23上,所述连接件25安装在第四电动推杆23的一端,所述第一旋转套筒24安装在连接件25上,所述连接件25上安装有第四步进电机42,所述工作位38上安装有第二旋转套筒26。
41.作为本发明的一种优选实施方式,所述底板旋转机构包括第五步进电机30、第五电动推杆29、第二吸盘28和第四位移传感器31,所述第五电动推杆29安装在第五步进电机30上,所述第四位移传感器31安装在第五电动推杆29上,所述第二吸盘28安装在第五电动推杆29上。
42.作为本发明的一种优选实施方式,所述机械臂焊接机构包括第一伺服电机10、第二伺服电机9、第一机械臂杆35、第二机械臂杆34和第三伺服电机21,所述的第一伺服电机10安装在焊接机构15底部,所述第二伺服电机9与第一机械臂杆35一端连接,所述第一机械臂杆35另一端与第二机械臂杆34连接,所述第二机械臂杆34一端与第三伺服电机21连接,第二机械臂杆34另一端与焊接机构15连接。
43.作为本发明的一种优选实施方式,所述储料盒12的一侧安装有第一卡板36,所述卡底板机构11的内部安装有第二弹簧33,所述第二弹簧33的顶部安装有第二卡板32,所述第一电动推杆18上安装有第一位移传感器41。
44.作为本发明的一种优选实施方式,所述焊接机构15包括第一伺服电机10,所述第一伺服电机10上安装有第二伺服电机9,所述第二伺服电机9上安装有第一机械臂杆35,所述第一机械臂杆35上安装有第二机械臂杆34。
45.一种智能装配和焊接家用锅炉的方法,包括以下步骤:
46.步骤一:当第三位移传感器19的位移值为d,检测到皮带机39末端没有锅炉框45时,皮带机39启动;当第三位移传感器19的位移值为x时,安装在皮带机39旁边的第六步进电机20启动,通过输出轴带动挡板27,将皮带机39上锅炉框45挡住,皮带机39停止工作;此时,安装在工作位38上的第二步进电机6启动,带动第二连接装置5,使得第一电磁夹8转向锅炉框45;通过第二电动推杆7将第一电磁夹8推向锅炉框45,利用第一电磁夹8将锅炉框45夹住;通过第二电动推杆7将锅炉框45夹起,利用第二步进电机6将锅炉框45转向工作位38大体位置,第二电动推杆7将锅炉框45放下后,将第一电磁夹8升起。
47.步骤二:启动固定旋转机构中的电动推杆,带动旋转套筒靠近锅炉框45,当第二位移传感器22的位移值为y,固定旋转机构中的四个旋转套筒刚好能够将一个锅炉框45夹住,电动推杆停止运动。
48.步骤三:当第一位移传感器41的位移值为z,储料盒12中存有底板44,并且储料盒12中的第一弹簧13将底板44顶起时,第一步进电机14启动,带动第一连接装置16,使得第一吸盘17与底板44同心;通过第一电动推杆18将第一吸盘17推向底板44,当第一位移传感器41的位移值为a,,第一吸盘17能够吸住底板44的距离时,第一电动推杆18停止推动,第一吸盘17将底板44吸住,利用第一电动推杆18和第一步进电机14,将吸住的底板44放入已经固定好的锅炉框45中,此时,第一卡板36通过卡槽43进入储料盒12,辅助卡底板机构11将底板44卡在储料盒12中,然后第一电动推杆18启动退出工作位38。
49.步骤四:安装在工作位38下方的第五电动推杆29将第二吸盘28向上推出,当第四位移传感器31的位移值为b,,第二吸盘28能够吸住已放入锅炉框45中的底板44时,第五电动推杆29停止推动,使用第二吸盘28将底板44吸住,利用第五电动推杆29将底板44向下拉动一段距离能够使锅炉框45和底板44紧紧配合。
50.步骤五:通过第一伺服电机10将焊接机构15转向配合好的锅炉本体,利用第二伺服电机9和第三伺服电机21,带动第一机械臂杆35和第二机械臂杆34,使焊接机构15中焊接棒对准锅炉框45和底板44配合的圆周边。
51.步骤六:启动第五步进电机30,以及固定旋转机构中的步进电机,使得第二吸盘28吸住的底板44和利用摩擦里可转动的锅炉框45,能够进行同步转动,同时,机械臂焊接机构中的焊接机构15进行焊接。通过机械臂转动方向,结合锅炉框45和底板44同步旋转,可以实现点焊以及将圆弧周边满焊,均可实现将锅炉框45和底板44固定连接。
52.步骤七:当焊接t,能够点焊或者满焊所用时间后,机械臂焊接机构完成焊接后,通过第二、第三伺服电机21使机械臂推出工作位38。固定旋转装置中的电动推杆启动,将旋转套筒推出工作位38,第二吸盘28松开底板44。
53.步骤八:利用夹取装置,通过第三步进电机3和第三电动推杆2将第二电磁夹1推入锅炉中,利用第二电磁夹1将完成焊接的锅炉夹住,在通过第三步进电机3和第三电动推杆2将夹住的锅炉放入下一工位皮带机40上。重复step1-8步骤,直到第一位移传感器41的位移值为c,储料盒12中没有底板44时的位移值,完成一盒底板44的装配焊接。
54.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
55.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。