1.本发明涉及的是一种水面无人艇领域的技术,具体是一种姿态自适应式水面双体无人平台。
背景技术:
2.无人艇是用于监测、检验和运输的水面无人平台。现有的无人艇在航行过程中容易受风浪影响,出现横摇、纵倾等船体运动,不利于设备运转和任务执行,阻碍了无人艇在环境监测以及自主运动等领域的推广应用。现有的无人艇动力定位系统通过gps、惯性导航仪以及风速仪等进行无人船舶定位,通过plc控制器进行控制,但这些技术一般只具备横向和纵向两个方向的推进器,无法使船舶进行横向移动或原地回转运动,当遭遇恶劣海况时,无法消除船舶在波浪中的运动,不利于无人艇设备的正常运作,不适用精确监测和军事用途。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提出一种姿态自适应式水面双体无人平台,操纵性提升,可以实现原地回转和横向移动,可以应用在一般船舶无法通行的狭窄水域;稳定性提升,在一般动力定位的基础上,保证了本装置在深度、横摇和纵倾等船体运动中的定姿态能力,为设备的平稳运行提供良好条件。
4.本发明是通过以下技术方案实现的:
5.本发明涉及一种姿态自适应式水面双体无人平台,包括:双体船体以及设置于其内部的电机、复合推进机构和控制模块,其中:复合推进机构的推进器设置于片体前端和后端,电机与复合推进机构相连,控制模块接收gps和传感器输出的水体中的状态信息,即当前位置、横摇角和电量信息,通过接收水面操控指令,向复合推进机构发出控制命令,使装置实现原地回转和横向移动运动;控制模块读取gps和传感器输出的当前横摇角和位置信息,通过定姿态闭环控制,向复合推进机构发出平动和转动指令,使装置实现稳定姿态。
6.所述的电机优选设置于双体船两个片体中部。
7.所述的复合推进机构包括:四个导管螺旋桨和四个垂直推进器,其中:导管螺旋桨设置于双体船两个片体前后部,垂直推进器收藏于片体内部,导管螺旋桨和垂直推进器分别与电机相连,导管螺旋桨与控制模块相连并接收控制指令以从纵向布置状态转变为对角布置状态;垂直推进器与控制模块相连并接收控制指令以向水下延伸并启动垂直推进。
8.所述的定姿态闭环控制是指:其中:u(t)为算法产生的输入控制值,k
p
、ki和kd分别为比例系数、积分系数、微分系数,e(t)为设备的横摇角误差;e(t)=a
d-a
in
(t),ad为设定的可接收横摇角,a
in
(t)为双体船体在水体中当前横摇角。
9.所述的双体船体为高速穿浪双体船,包括:穿浪式片体、内倾型船首、压载物、压浪型干舷和分水舯,其中:片体间距为1.5~2b
wl
,b
wl
为穿浪式片体的水线的宽度。
10.所述的双体船体内设有压载物以使船体在水中能够自然保持正浮状态,该压载物设置于艏、艉舱内,优选为泡沫材质制成。
11.所述的定姿态闭环控制优选进一步包括返回模式,当控制模块检测到电量不足或失去控制信号时,执行返回命令,以使无人平台快速返回运动起点。
12.所述的控制模块包括:电量控制单元、横摇控制单元以及坐标控制单元,其中:电量控制单元与电池电量传感器相连并传输电池可使用电量信息,横摇控制单元与角度传感器相连并传输无人平台的横摇角信息,坐标控制单元与gps相连并传输无人平台的地理位置信息。技术效果
13.本发明整体解决了现有无人平台机动性不高,响应操控指令的时间长、效果差,并且受风浪条件的影响,搭载设备的使用效果差的问题。
14.与现有技术相比,本发明通过复合推进机构实现本平台的原地回转运动和横向平移运动,使平台在狭窄水域实现更高的机动性;通过复合推进机构实现运动过程中的姿态自适应性,使整个平台在波浪中具有更好的稳定性。
附图说明
15.图1为本发明的侧视图;
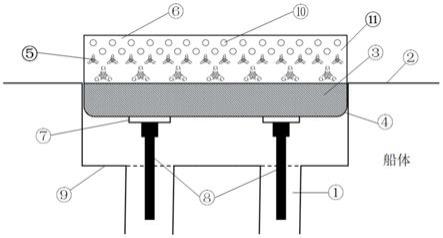
16.图2为本发明的正视图;
17.图3为本发明的俯视图;
18.图4为本发明垂直推进器启动状态的侧视图;
19.图5为本发明导管螺旋桨对角布置状态的俯视图;
20.图6为本发明的动力装置示意图;
21.图7为导管螺旋桨和垂直推进器的示意图;
22.图8为定姿态控制方法流程图;
23.图中:1设备箱、2第一电机、3左电池组、4第二电机、5艉部泡沫填充物、6艏部泡沫填充物、7支架、8分水舯、9船体、10第一螺旋桨、11第一垂直推进器、12第二垂直推进器、13第二螺旋桨、14第三螺旋桨、15第三垂直推进器、16第四垂直推进器、17第四螺旋桨、18传感器、19控制模块、20第一信号传输设备、21第二信号传输设备、22第一船底折叠盖、23第二船底折叠盖、24艉部伸缩机构、25艏部伸缩机构、26艉部旋转机构、27艏部旋转机构、28导线、29第三船底折叠盖、30第四船底折叠盖、31第三电机、32右电池组、33第四电机。
具体实施方式
24.如图1所示,为本实施例涉及一种姿态自适应式水面双体无人平台,包括:双体船体、电机、复合推进机构和控制模块,其中:复合推进机构设置于双体船的前端和后端,电机设置于船体中部,控制模块与电机、复合推进机构相连。
25.如图3所示,所述的复合推进机构包括:导管螺旋桨10、导管螺旋桨13、导管螺旋桨14、导管螺旋桨17、垂直推进器11、垂直推进器12、垂直推进器15、垂直推进器16,其中:导管螺旋桨10、导管螺旋桨14、垂直推进器11和垂直推进器15设置于船体9两个片体的艉部泡沫填充物5内,导管螺旋桨13、导管螺旋桨17、垂直推进器12和垂直推进器16设置于船体9两个
片体的艏部泡沫填充物6内。
26.所述的复合推进机构根据任务需要执行不同工作指令,当平台直航时,艏部螺旋桨和垂直推进器待机,仅有艉部的螺旋桨工作;当平台常规转向时,首部螺旋桨启动,帮助艉部螺旋桨完成转向任务,垂直推进器仍待机;当平台紧急转向或需要原地回转时,艏部和艉部螺旋桨转换为对角布置状态,可快速实现上述任务,垂直推进器仍待机;不论螺旋桨处在哪种布置状态,当平台遭遇风浪需要稳定的姿态时,垂直推进器启动,通过定姿态闭环控制实现平台的稳定。
27.所述的垂直推进器布置于艏、艉部船底折叠盖22、23、29和30上方。如图6所示,所述的电机通过导线与设备箱1中的控制模块19相连。
28.所述的垂直推进器和导管螺旋桨通过导线与船体9内部的电机2、4、31、33相连,通过电机控制导管螺旋桨和垂直推进器的转速,实现对整个装置运动方向和水中姿态的调节。所述的电机通过导线与船体9内部的电池组3、32相连,电池组为整个装置提供电力。
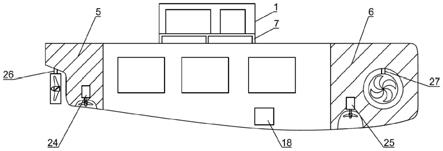
29.所述的船体9的长度为3.2m,宽度为1.9m,型深1.1m,其材质为具有一定强度的塑料,即pvc或亚克力材料。如图2所示,分水舯8设置设备箱1下方,其材质和船体9相同,起到分割波浪,减少波浪对船体底部砰击的作用。
30.如图7(a)所示,所述的垂直推进器与伸缩机构25和船底折叠盖23相连,当接收到垂直推进器启动指令时,船底折叠盖收起,伸缩机构伸出机械杆,从而垂直推进器伸出船体9启动,如图4所示。本装置中的四组垂直推进器、伸缩机构及船底折叠盖运行模式相同。
31.如图7(b)所示,所述的导管螺旋桨与旋转机构27相连,当接收到对角布置状态指令时,旋转机构启动,导管螺旋管转到与船体中线呈45度方向,如图5所示。本装置中的四组导管螺旋桨及旋转机构运行模式相同。
32.所述的控制模块包括:控制模块19和传感器18,如图3所示,控制模块19设置于设备箱1中。如图1所示,所述的传感器18设置于船体9内中前端。控制模块19读取传感器18的数据,通过设置于设备箱1上的信号传输设备20、21传输到水面指挥中心,接收指挥中心的控制指令。
33.如图1所示,所述的船体9内设有与导管螺旋桨和垂直推进器相连的泡沫填充物,泡沫填充物可以起到密闭艏部和艉部舱室的作用,同时还可以调整船体的重心和浮心,在没有外力干扰时使整个装置在水中能够处于正浮状态,并且在船体突遇撞击时可以避免因船体破损而引起的进水。
34.如图3所示,本装置在水体中处于自然正浮状态,导管螺旋管处于纵向布置状态,其中:艏部螺旋桨轴线垂直于船体长度方向,在本装置向前直线航行时处于待机状态,在本装置需要转向时,启动相应方向的艏部螺旋桨,帮助本装置完成转向运动;艉部螺旋桨轴线平行于船体长度方向,为本装置提供前进动力。当本装置需要在水中横向移动或原地回转时,导管螺旋桨在控制模块19的指令下,转换为对角布置状态,如图5所示。此时艏、艉部螺旋桨皆处于工作状态,通过调节电机转速,使本装置实现横向移动或原地回转运动。
35.如图3所示,本装置在水体中处于自然正浮状态,垂直推进器收藏在船体内待机。当需要稳定姿态时,垂直推进器在控制模块19的指令下,伸出船体并启动。通过调节电机转速,实现横向和纵向上的姿态稳定,抑制本装置在水体中的纵倾、横摇和升沉等船体运动,从而使装置可以保持稳定。
36.如图8所示,为本实施例基于上述姿态自适应式水面双体无人平台的控制方法,通过控制第一至第四电机实现整个平台在预定的可接收横摇角稳定,具体包括:
37.步骤s1:定姿态指令判断,当控制模块19收到设定的可接收横摇角ad时,则执行下一步,否则继续等待;
38.步骤s2:读取当前横摇角a
in
(t),控制模块读取传感器18的当前横摇角a
in
(t),获取设备当前时刻的实时横摇角度;
39.步骤s3:比较横摇角,控制模块19比较可接收横摇角ad和当前横摇角a
in
(t),横摇角误差e(t)=a
d-a
in
(t);
40.步骤s4:当e(t)大于设定值,则执行定姿态闭环控制算法,计算出控制指令后,执行步骤s5:电机转速调节,然后回到步骤s2;
41.当e(t)小于等于设定值,则取消定姿态控制;
42.步骤s4中所述的定姿态闭环控制算法具体是指:其中:u(t)算法产生的输入控制值,k
p
、ki和kd分别为比例系数、积分系数和微分系数,横摇角误差e(t)=a
d-a
in
(t)。
43.所述的信号传输设备20和21中设置有gps信号导航设备,可以记录本装置的位置;控制模块19中设置有返回模式,当电池的电量不足时,控制模块19调节各个电机,使装置回到gps记录的运动起点从而回收。
44.与现有技术相比,本装置能够显著改善无人平台的回转直径和横摇、升沉、纵倾运动幅值。
45.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。