1.本发明涉及无线通信领域,具体涉及一种同步扰码的盲识别方法。
背景技术:
2.扰码作为通信系统的关键技术之一,广泛应用于无线通信系统中,提高了传输数据的定时恢复能力及物理层、链路层的安全性。在非合作的信息对抗领域中,侦察方在信道解码后需要进行解扰码才能对未知信息进行进一步的分析处理,能否正确解扰将直接影响到原始信息的正确获取。同步扰码由于其结构简单且不会出现错误扩散现象的特点,是扰码的一种主要形式。同步扰码是将线性反馈移位寄存器(lfsr)的输出序列与信息序列逐位异或得到。
3.同步扰码的盲识别是实现对扰码生成多项式的确定和同步扰码初态的重构。由于同步扰码与流密码有相似的结构,因此对码的识别较为困难,目前同步扰码的盲识别方法都是以信源序列0,1的不均衡性、扰码多项式项数及阶数的有限性为前提的,而且大都需要一定的先验知识,这存在识别复杂,精确度低的问题。
技术实现要素:
4.本发明所要解决的技术问题是现有技术中存在的识别复杂,精确度低的技术问题。提供一种新的同步扰码的盲识别方法,该同步扰码的盲识别方法具有识别简单,精确度高的特点。
5.为解决上述技术问题,采用的技术方案如下:
6.一种同步扰码的盲识别方法,所述同步扰码的盲识别方法包括:
7.步骤一,设置x个扰码阶数识别子单元组成扰码阶数识别单元,设置y个多项式判别子单元组成多项式判别单元;x个扰码阶数识别子单元均与y个多项式判别子单元控制连接;多项式判别单元连接到盲识别综合计算单元;其中x为大于等于2的正整数,y为大于等于2的正整数;
8.步骤二,任意选取开通至少2个扰码阶数识别子单元和至少2个多项式判别子单元作为实时盲识别组,其余的扰码阶数识别子单元和多项式判别子单元关断;
9.步骤三,抽取实时盲识别组中的扰码阶数识别子单元和多项式判别子单元的状态表征值;运行第一动态融合权值分配算法分别对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态融合得到第一融合结果和第二融合结果;
10.步骤四,运行第二动态融合权值分配算法计算出混合最优权值,对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态混合得出第三融合结果;
11.步骤五,在第一融合结果、第二融合结果、第三融合结果均符合预定义结果情况下,扰码阶数识别子单元进行扰码阶数识别,再执行步骤六,否则返回步骤二;
12.步骤六,通过计算并判断扰码序列和输出序列的关联性,进行扰码多项式和扰码多项式初态估计;
13.步骤七,对多项式和扰码多项式初态估计进行误差消除后,通过步骤七,对多项式和扰码多项式初态估计进行误差消除后,通过计算出x'k完成同步扰码的盲识别。
14.本发明通过挑选盲识别组,并对盲识别组的状态进行评估评价,从而选用状态好的盲识别组进行盲识别,并通过盲识别前的数据进行误差消除的方式,提高了实时性和精确度。具体地,进行扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元和扰码阶数识别子单元的状态一起做综合计算。在此情况下,通过对三种计算出的状态的判断,来控制实时盲识别组的后续操作,是继续还是选用其他实时态的组合进行后续操作。通过以上决策,能够挑选出状态符合预期的无故障,且误差最小的盲识别组进行作业。
15.上述方案中,为优化,进一步地,步骤五中的扰码阶数识别包括:
16.步骤1,定义xk为待加扰的信息序列,yk为用来加扰的lfsr序列,zk为输出的扰码序列,定义t时刻待识别的扰码序列为
17.步骤2,对接收的扰码序列集合进行关联值α(ti)计算;
18.其中,ti为小于t的时刻值,n为同步扰码序列长度;
19.步骤3,定义阈值遍历阶数来比较阈值与关联值α(ti)的大小,将大于阈值的关联值挑出,计算出关联值对应的移动值τ,将移动值τ最大公约数计算为初始扰码阶数l。
20.进一步地,步骤六包括:
21.步骤a,提取阶数为l的全部本原多项式构成集合{g(n)},其中1≤n≤m;
22.步骤b,根据集合{g(n)}中的各本原多项式及各多项式初态,根据的各本原多项式及各多项式初态计算lfsr加扰序列与扰码序列的关联度值其中1≤n≤m,1≤i≤2
l-1;
23.步骤c,判断相关度大小,定义最大值时所对应的{g(n)}中的本原多项式及多项式初态为待识别同步扰码正确的多项式及初态作为yk。
24.进一步地,第一动态融合权值分配算法包括:
25.步骤a,定义扰码阶数识别子单元或多项式判别子单元为判别标的,计算判别标的状态表征值的每个周期位置的中心点hb(s)为第b个判别标的的状态表征观测函数:
26.其中,s为当前观测周期,r为判别标的个数,b为小于r的正整数;
27.步骤b,计算各判别标的的状态表征值实际测量值与中心点的偏差δhr(s)
28.其中,hr(s)为r个判别标的的观测函数;
29.步骤c,计算各判别标的偏差的和θ
r1
与偏差平方的和θ
r2
:
30.其中,δhr(c)为观测周期中c时刻的偏差,c小于s;
[0031][0032]
步骤d,计算各判别标的偏差的均值
[0033][0034]
步骤e,计算各判别标的偏差的标准差δ
rs
:
[0035][0036]
步骤f,以各判别标的的标准差计算出各判别标的的权值wr:
[0037][0038]
步骤g,根据权值wi计算融合结果x(s):
[0039][0040]
其中,r为判别标的个数。
[0041]
进一步地,第二动态融合权值分配算法包括:
[0042]
步骤a,统一定义扰码阶数识别子单元或多项式判别子单元为权值标的,排序编号为1,2,3...n,表征权值标的正常的归一真值为x,权值标的的实测归一值为x1,x2,x3,...,xn,定义方差为δ1,δ2,δ3,...,δn,权值为w1,w2,w3,...,wn;
[0043]
步骤b,依照排序选定3个相邻的权值标的,实测归一值分别为步骤b,依照排序选定3个相邻的权值标的,实测归一值分别为对应误差为
[0044]
步骤c,计算出互协方差和自协方差,消元后计算出方差为:
[0045][0046][0047][0048]
步骤d,计算出混合最优权值为:
[0049]
v为小于h的正整数。
[0050]
本发明的有益效果:本发明通过挑选盲识别组,并对盲识别组的状态进行评估评价,从而选用状态好的盲识别组进行盲识别,并通过盲识别前的数据进行误差消除的方式,提高了实时性和精确度。具体地,进行扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元和扰码阶数识别子单元的状态一起做综合计算。在此情况下,通过对三种计算出的状态的判断,来控制实时盲识别组的后续操作,是继续还是选用其他实时态的组合进行后续操作。通过以上决策,能够挑选出状态符合预
期的无故障,且误差最小的盲识别组进行作业。
[0051]
同时,本发明通过计算扰码序列和输出序列的关联性,并对关联性进行分析计算,在不需要前知参数的配合下,能够较快较精确的计算出扰码阶数和多项式及初态,进一步降低复杂度并提交精确度。
附图说明
[0052]
下面结合附图和实施例对本发明进一步说明。
[0053]
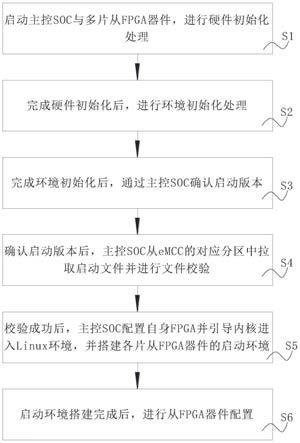
图1,扰码阶数识别示意图。
[0054]
图2,扰码多项式和扰码多项式初态估计示意图。
具体实施方式
[0055]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0056]
实施例1
[0057]
本实施例提供一种同步扰码的盲识别方法,所述同步扰码的盲识别方法包括:
[0058]
步骤一,设置x个扰码阶数识别子单元组成扰码阶数识别单元,设置y个多项式判别子单元组成多项式判别单元;x个扰码阶数识别子单元均与y个多项式判别子单元控制连接;多项式判别单元连接到盲识别综合计算单元;其中x为大于等于2的正整数,y为大于等于2的正整数;
[0059]
步骤二,任意选取开通至少2个扰码阶数识别子单元和至少2个多项式判别子单元作为实时盲识别组,其余的扰码阶数识别子单元和多项式判别子单元关断;
[0060]
步骤三,抽取实时盲识别组中的扰码阶数识别子单元和多项式判别子单元的状态表征值;运行第一动态融合权值分配算法分别对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态融合得到第一融合结果和第二融合结果;
[0061]
步骤四,运行第二动态融合权值分配算法计算出混合最优权值,对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态混合得出第三融合结果;
[0062]
步骤五,在第一融合结果、第二融合结果、第三融合结果均符合预定义结果情况下,扰码阶数识别子单元进行扰码阶数识别,再执行步骤六,否则返回步骤二;
[0063]
步骤六,通过计算并判断扰码序列和输出序列的关联性,进行扰码多项式和扰码多项式初态估计;
[0064]
步骤七,对多项式和扰码多项式初态估计进行误差消除后,通过步骤七,对多项式和扰码多项式初态估计进行误差消除后,通过计算出x'k完成同步扰码的盲识别。
[0065]
本实施例通过挑选盲识别组,并对盲识别组的状态进行评估评价,从而选用状态好的盲识别组进行盲识别,并通过盲识别前的数据进行误差消除的方式,提高了实时性和精确度。具体地,进行扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元和扰码阶数识别子单元的状态一起做综合计算。在此情况下,通过对三种计算出的状态的判断,来控制实时盲识别组的后续操作,是继续还是选用
其他实时态的组合进行后续操作。通过以上决策,能够挑选出状态符合预期的无故障,且误差最小的盲识别组进行作业。
[0066]
如图1,步骤五中的扰码阶数识别包括:
[0067]
步骤1,定义xk为待加扰的信息序列,yk为用来加扰的lfsr序列,zk为输出的扰码序列,定义t时刻待识别的扰码序列为
[0068]
步骤2,对接收的扰码序列集合进行关联值α(ti)计算;
[0069]
其中,ti为小于t的时刻值,n为同步扰码序列长度;
[0070]
步骤3,定义阈值遍历阶数来比较阈值与关联值α(ti)的大小,将大于阈值的关联值挑出,计算出关联值对应的移动值τ,将移动值τ最大公约数计算为初始扰码阶数l。
[0071]
如图2,步骤六包括:
[0072]
步骤a,提取阶数为l的全部本原多项式构成集合{g(n)},其中1≤n≤m;
[0073]
步骤b,根据集合{g(n)}中的各本原多项式及各多项式初态,根据的各本原多项式及各多项式初态计算lfsr加扰序列与扰码序列的关联度值其中1≤n≤m,1≤i≤2
l-1;
[0074]
步骤c,判断相关度大小,定义最大值时所对应的{g(n)}中的本原多项式及多项式初态为待识别同步扰码正确的多项式及初态作为yk。
[0075]
进一步地,第一动态融合权值分配算法包括:
[0076]
步骤a,定义扰码阶数识别子单元或多项式判别子单元为判别标的,计算判别标的状态表征值的每个周期位置的中心点hb(s)为第b个判别标的的状态表征观测函数:
[0077]
其中,s为当前观测周期,r为判别标的个数,b为小于r的正整数;
[0078]
步骤b,计算各判别标的的状态表征值实际测量值与中心点的偏差δhr(s)
[0079]
其中,hr(s)为r个判别标的的观测函数;
[0080]
步骤c,计算各判别标的偏差的和θ
r1
与偏差平方的和θ
r2
:
[0081]
其中,δhr(c)为观测周期中c时刻的偏差,c小于s;
[0082][0083]
步骤d,计算各判别标的偏差的均值
[0084][0085]
步骤e,计算各判别标的偏差的标准差δ
rs
:
[0086][0087]
步骤f,以各判别标的的标准差计算出各判别标的的权值wr:
[0088][0089]
步骤g,根据权值wi计算融合结果x(s):
[0090][0091]
其中,r为判别标的个数。
[0092]
进一步地,第二动态融合权值分配算法包括:
[0093]
步骤a,统一定义扰码阶数识别子单元或多项式判别子单元为权值标的,排序编号为1,2,3...n,表征权值标的正常的归一真值为x,权值标的的实测归一值为x1,x2,x3,...,xn,定义方差为δ1,δ2,δ3,...,δn,权值为w1,w2,w3,...,wn;
[0094]
步骤b,依照排序选定3个相邻的权值标的,实测归一值分别为步骤b,依照排序选定3个相邻的权值标的,实测归一值分别为对应误差为
[0095]
步骤c,计算出互协方差和自协方差,消元后计算出方差为:
[0096][0097][0098][0099]
步骤d,计算出混合最优权值为:
[0100]
v为小于h的正整数。
[0101]
本实施例通过挑选盲识别组,并对盲识别组的状态进行评估评价,从而选用状态好的盲识别组进行盲识别,并通过盲识别前的数据进行误差消除的方式,提高了实时性和精确度。具体地,进行扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元的状态综合计算,对扰码阶数识别子单元和扰码阶数识别子单元的状态一起做综合计算。在此情况下,通过对三种计算出的状态的判断,来控制实时盲识别组的后续操作,是继续还是选用其他实时态的组合进行后续操作。通过以上决策,能够挑选出状态符合预期的无故障,且误差最小的盲识别组进行作业。
[0102]
同时,本实施例通过计算扰码序列和输出序列的关联性,并对关联性进行分析计算,在不需要前知参数的配合下,能够较快较精确的计算出扰码阶数和多项式及初态,进一步降低复杂度并提交精确度。相关度取得最大值时所对应的多项式及初态为待识别扰码序列的多项式及初态,因此可以通过统计并寻找最大相关度值来实现对同步扰码参数的识别。
[0103]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员能够理解本发明,但是本发明不仅限于具体实施方式的范围,对本技术领域的普通技
术人员而言,只要各种变化只要在所附的权利要求限定和确定的本发明精神和范围内,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。