技术特征:
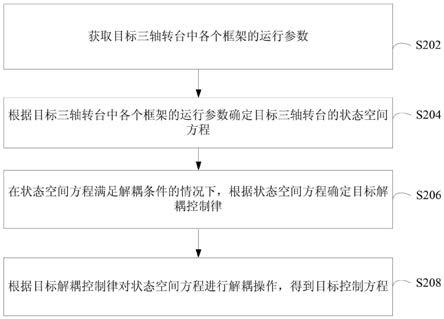
1.一种三轴转台的控制方法,其特征在于,所述方法包括:获取目标三轴转台中各个框架的运行参数;根据所述目标三轴转台中各个框架的运行参数确定所述目标三轴转台的状态空间方程;在所述状态空间方程满足解耦条件的情况下,根据所述状态空间方程确定目标解耦控制律;根据所述目标解耦控制律对所述状态空间方程进行解耦操作,得到目标控制方程;基于所述目标控制方程控制所述目标三轴转台的运行。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据预设的时间性能函数和所述状态空间方程生成解耦控制器,所述解耦控制器用于将所述目标三轴转台的跟踪误差控制在预设的时间范围以及预设的空间范围。3.根据权利要求1或2所述的方法,其特征在于,所述根据所述目标三轴转台中各个框架的运行参数确定所述目标三轴转台的状态空间方程,包括:根据所述目标三轴转台中各个框架的运行参数建立所述目标三轴转台的动力学方程;根据各个框架的力矩、控制各个框架的电压的线性关系以及所述目标三轴转台的动力学方程确定所述目标三轴转台的状态空间方程。4.根据权利要求3所述的方法,其特征在于,所述根据所述目标三轴转台中各个框架的运行参数建立所述目标三轴转台的动力学方程,包括:根据m
x
、m
y
、m
z
、w1、w2以及w3确定所述目标三轴转台的动力学方程,其中,m
x
为所述目标三轴转台中横滚框的力矩,m
y
为所述目标三轴转台中俯仰框的力矩,m
z
为所述目标三轴转台中方位框的力矩,w1为所述目标三轴转台中横滚框相对于惯性坐标系的角速度矢量,w2为所述目标三轴转台中俯仰框相对于惯性坐标系的角速度矢量,w3为所述目标三轴转台中方位框相对于惯性坐标系的角速度矢量。5.根据权利要求1或2所述的方法,其特征在于,所述方法还包括:根据所述状态空间方程的控制特性确定所述状态空间方程是否满足解耦条件,所述控制特性包括单输入单输出的控制特性、单输入多输出的控制特性、多输入单输出的控制特性以及多输入多输出的控制特性。6.根据权利要求5所述的方法,其特征在于,所述方法还包括:根据所述状态空间方程中是否包括速度耦合和/或转矩耦合确定所述状态空间方程的控制特性。7.根据权利要求1或2所述的方法,其特征在于,所述根据所述状态空间方程确定目标解耦控制律,包括:将所述状态空间方程转换成非线性状态空间方程;根据所述非线性状态空间方程以及预设的初始解耦控制律确定所述目标解耦控制律。8.一种三轴转台的控制装置,其特征在于,所述装置包括:获取模块,用于获取目标三轴转台中各个框架的运行参数;第一确定模块,用于根据所述目标三轴转台中各个框架的运行参数确定所述目标三轴转台的状态空间方程;第二确定模块,用于在所述状态空间方程满足解耦条件的情况下,根据所述状态空间
方程确定目标解耦控制律;解耦模块,用于根据所述目标解耦控制律对所述状态空间方程进行解耦操作,得到目标控制方程;控制模块,用于基于所述目标控制方程控制所述目标三轴转台的运行。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种三轴转台的控制方法、装置、计算机设备和存储介质,该方法包括:获取目标三轴转台中各个框架的运行参数;根据目标三轴转台中各个框架的运行参数确定目标三轴转台的状态空间方程;在状态空间方程满足解耦条件的情况下,根据状态空间方程的非线性表达式确定解耦控制律;根据解耦控制律对状态空间方程进行解耦操作,得到目标状态方程;基于目标状态方程控制目标三轴转台的运行。本申请的控制方法能够避免三轴转台中各轴间的耦合影响,提升对三轴转台的控制性能。提升对三轴转台的控制性能。提升对三轴转台的控制性能。
技术研发人员:王敏林 董雪明 杜美林
受保护的技术使用者:中国航空工业集团公司北京长城计量测试技术研究所
技术研发日:2021.11.11
技术公布日:2022/3/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。