1.本发明涉及智能控制领域,尤其涉及一种机器人系统及基于磁场信号的机器人避障方法。
背景技术:
2.低重复率、高覆盖率是遍历式机器人如吸尘、割草及泳池清洗等移动机器人追求的目标。以移动机器人为智能割草机器人为例,割草机器人以边界围住的草坪为工作区域以进行割草作业,草坪之外定义为非工作区域。
3.机器人在工作过程中,由于机器人存在一定的盲区,容易误入障碍物区域;现有技术中,避障方法包括:通过传感器碰撞检测识别障碍物,通过视觉识别区别障碍物,或通过超声波探测检测障碍物等方式,然而,现有技术的障碍物识别方式容易被外界环境遮蔽和干扰造成错误识别,导致无法准确识别真实障碍物。
技术实现要素:
4.为解决上述技术问题,本发明的目的在于提供一种机器人系统及基于磁场信号的机器人避障方法。
5.为了实现上述发明目的之一,本发明一实施方式提供一种机器人系统,其包括机器人、脉冲电流发生器,单根电导线,其连接所述脉冲电流发生器且形成闭合电流回路;
6.所述电导线包括:以所述电导线对折后,形成依次相互连接的第一子导线段、第二子导线段和第三子导线段;
7.所述电导线折弯部分形成所述第二子导线段;
8.所述第一子导线段和所述第三子导线段分别连接所述脉冲电流发生器,且所述第一子导线段和所述第三子导线段相互平行排布,电流流向相反;
9.其中,所述单根电导线配置成布置于障碍物的预设距离处,所述机器人配置成在行进过程中根据所述单根电导线产生的磁场信号的强弱及方向确定机器人是否遇到障碍物;
10.通过上述系统,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度。
11.作为本发明一实施方式的进一步改进,所述第一子导线段和所述第三子导线段自连接所述脉冲电流发生器的端部开始,始终朝远离所述脉冲电流发生器的方向延伸;
12.空间位置上,所述脉冲电流发生器和所述第二子导线段分别靠近所述障碍物相对设置的两个侧端排布;
13.通过该系统,使得各位置磁场分布较为均匀,提供利于机器人识别的磁场。
14.作为本发明一实施方式的进一步改进,所述第一子导线段和所述第三子导线段为相互平行排布的直线段;
15.通过该系统,使得各位置磁场分布均匀一致,提供利于机器人识别的磁场。
16.作为本发明一实施方式的进一步改进,所述第一子导线段和所述第三子导线段相
互抵接排布;
17.通过该系统,使得第一子导线段和所述第三子导线段两侧之外的磁场强度尽可能的相互抵消,提供利于机器人识别的磁场。
18.作为本发明一实施方式的进一步改进,所述第三子导线段排布在所述第一子导线段和所述障碍物之间;
19.所述机器人配置成当检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同,且检测到磁场信号的强度不小于预设第一阈值时,确定机器人前方设置有障碍物;
20.具体的磁场强度和磁场方向的识别方式,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度。
21.作为本发明一实施方式的进一步改进,所述机器人还配置成在确定机器人前方设置有障碍物后沿行走路线继续行走,并且若机器人检测到的磁场信号强度不小于预设第二阈值时,则确认机器人检测到障碍物的结果正确,并驱动机器人转向;
22.其中,所述预设第二阈值大于所述预设第一阈值,且所述预设第二阈值不小于第一子导线段产生的磁场信号强度;
23.对判断结果进行校验,提高机器人对障碍物的识别精度。
24.作为本发明一实施方式的进一步改进,所述第三子导线段排布在所述第一子导线段和所述障碍物之间;
25.所述机器人还配置成当检测到磁场信号,且检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同时,以当前时刻为起始,若在预设时间内,检测到磁场信号方向相反,则确定机器人前方设置有障碍物;
26.具体的磁场强度和磁场方向的识别方式,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度。
27.为了实现上述发明目的之一,本发明一实施方式提供一种基于磁场信号的机器人避障方法,所述方法包括:在机器人行走路线上、且位于障碍物的预设距离处设置避障单元;所述避障单元产生具有预定方向的磁场信号;
28.机器人行进过程中,根据所述避障单元产生的磁场信号的强弱及方向确定机器人是否遇到障碍物;
29.其中,基于磁场信号的机器人避障设置的所述避障单元包括:脉冲电流发生器,连接所述脉冲电流发生器且形成闭合电流回路的单根电导线;
30.所述电导线包括:以所述电导线对折后,形成依次相互连接的第一子导线段、第二子导线段和第三子导线段;
31.所述电导线折弯部分形成所述第二子导线段;
32.所述第一子导线段和所述第三子导线段分别连接所述脉冲电流发生器,且其之间相互平行排布,电流流向相反;
33.通过上述方法,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度。
34.作为本发明一实施方式的进一步改进,设置所述第三子导线段排布在所述第一子导线段和所述障碍物之间;
[0035]“机器人行进过程中,根据所述避障单元产生的磁场信号的强弱及方向确定机器人是否遇到障碍物”包括:
[0036]
当机器人检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同,且检测到磁场信号的强度不小于预设第一阈值时,确定机器人前方设置有障碍物;
[0037]
在确定机器人前方设置有障碍物后,所述方法还包括:
[0038]
驱动机器人沿行走路线继续行走,若机器人检测到的磁场信号强度不小于预设第二阈值时,则确认机器人检测到障碍物的结果正确,并驱动机器人转向;
[0039]
所述预设第二阈值大于所述预设第一阈值,且所述预设第二阈值不小于第一子导线段产生的磁场信号强度;
[0040]
具体的磁场强度和磁场方向的识别方式,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度;并在首次识别障碍物后,对判断结果进行校验,进一步提高机器人对障碍物的识别精度。
[0041]
作为本发明一实施方式的进一步改进,设置所述第三子导线段排布在所述第一子导线段和所述障碍物之间;
[0042]“机器人行进过程中,根据所述避障单元产生的磁场信号的强弱及方向确定机器人是否遇到障碍物”包括:
[0043]
当机器人检测到磁场信号,且检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同时,以当前时刻为起始,若在预设时间内,检测到磁场信号方向相反,则确定机器人前方设置有障碍物。
[0044]
具体的磁场强度和磁场方向的识别方式,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度。
[0045]
与现有技术相比,本发明的机器人系统及基于磁场信号的机器人避障方法,在障碍物附近设置避障单元,通过避障单元中相互平行排布且电流方向相反的子导线段产生具有预定方向的磁场信号,机器人行走过程中,通过检测避障单元产生的磁场信号及方向,确定行进路径上是否具有障碍物,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度,达到更好避障的效果。
附图说明
[0046]
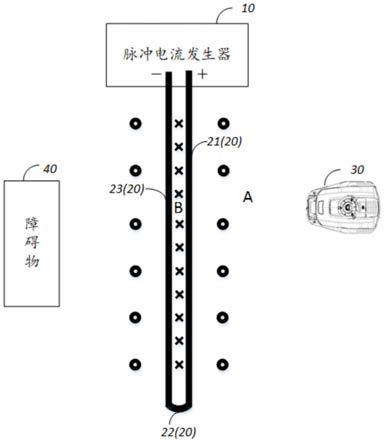
图1是本发明提供的机器人系统的结构示意图;
[0047]
图2a、2b是对应图1所示的机器人系统中机器人处于不同位置时的电压输出波形示意图;
[0048]
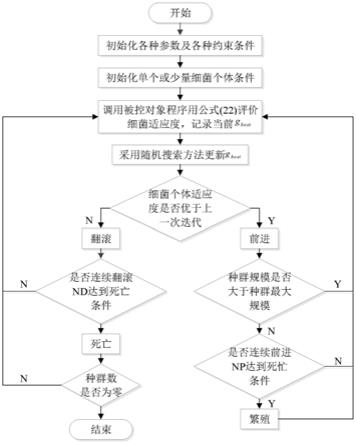
图3是本发明一实施方式提供的基于磁场信号的机器人避障方法的流程示意图。
具体实施方式
[0049]
以下将结合附图所示的各实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0050]
本发明的机器人可以是割草机器人,扫地机器人、扫雪机、吸叶机,高尔夫球场拾球机等,各种机器人可以自动行走于工作区域并进行相对应的工作,本发明具体示例中,以机器人为割草机器人为例做具体说明,相应的,所述工作区域可为草坪。
[0051]
所述割草机器人包括:本体,设置于本体上的行走单元、控制单元。所述行走单元
用于控制机器人行走、转向等;所述控制单元用于规划机器人的行走方向、行走路线,储存机器人获得的外部参数,以及对获取的参数进行处理、分析等,并根据处理、分析结果具体控制机器人;所述控制单元例如:mcu或dsp等。
[0052]
另外,所述机器人还包括:各种传感器,所述传感器例如:用于感应磁场强度及磁场方向的磁场信号感应传感器,倾倒、离地、地磁、陀螺仪等;存储模块例如:eprom、flash或sd卡等,以及用于工作的工作机构及供电电源;在本实施例中,工作机构为割草刀盘,在此不再一一具体赘述。
[0053]
如图1所示,本发明一实施方式提供一种机器人系统,包括机器人30、脉冲电流发生器10,单根电导线20,其连接所述脉冲电流发生器10且形成闭合电流回路;所述电导线20包括:以所述电导线20对折后,形成依次相互连接的第一子导线段21、第二子导线段22和第三子导线段23;所述电导线20折弯部分形成所述第二子导线段22;所述第一子导线段21和所述第三子导线段23分别连接所述脉冲电流发生器10,且所述第一子导线段21和所述第三子23导线段相互平行排布,电流流向相反。
[0054]
其中,所述单根电导线20配置成布置于障碍物40的预设距离处,所述机器人30配置成在行进过程中根据所述单根电导线20产生的磁场信号的强弱及方向确定机器人30是否遇到障碍物。
[0055]
可以理解的是,当脉冲电流发生器10导通,并发出脉冲电流信号通入所述电导线20后,电导线20内部形成回路,根据电生磁原理,电导线20周围产生特定的磁场;此时,由于对折所述电导线20形成的第一子导线段21和第三子导线段23相互平行排布,如此,第一子导线段21和第三子导线段23内的电流流向相反;相应的,第一子导线段21和第三子导线段23之间位置的磁场互相叠加增强,其两侧之外的磁场相互抵消减弱,且距其越远,磁场越弱。
[0056]
较佳的,所述第一子导线段21和所述第三子导线段23自连接所述脉冲电流发生器10的端部开始,始终朝远离所述脉冲电流发生器10的方向延伸;空间位置上,所述脉冲电流发生器10和所述第二子导线段22分别靠近所述障碍物40相对设置的两个侧端排布。
[0057]
较佳的,所述第一子导线段21和所述第三子导线段23为相互平行排布的直线段;如此,使得其两侧各部分磁场信号的强度相同。
[0058]
较佳的,所述第一子导线段21和所述第三子导线段23相互抵接排布;第一子导线段21和所述第三子导线段23之间距离越小,其之间的磁场强度越强;其两者侧边之外的磁场强度相互抵消,且在其之间距离最小,即相互抵接时,其两侧之外的磁场强度几乎为零;相应的,其之间距离越大,其两侧之外的磁场强度则会以其所在位置开始,向两侧逐渐减小。
[0059]
较佳的,在本发明具体示例中,所述第三子导线段23排布在所述第一子导线段21和所述障碍物40之间;相应的,本发明第一实施方式中,所述机器人30配置成当检测到磁场信号的方向与第一子导线段21产生的磁场信号方向相同,且检测到磁场信号的强度不小于预设第一阈值时,确定机器人30前方设置有障碍物。
[0060]
本发明具体实施方式中,该预设第一阈值的大小可以根据第一子导线段21产生的磁场信号的大小,以及第一子导线段21和第三子导线段23之间的距离决定;当机器人自第一子导线段21远离所述障碍物的一侧向障碍物方向移动并初进入电导线20产生的磁场范
围内时,机器人通过其上的磁场信号感应传感器感应到磁场信号,当机器人在感应到磁场信号并在到达第一子导线段21之前,机器人感应到的磁场方向始终与第一子导线段21产生的磁场方向相同,且感应到的磁场强度越来越强;当机器人到达第一子导线段21和第三子导线段23之间时,机器人感应到的磁场强度最强。
[0061]
本发明可实现方式中,将电导线20设置于障碍物40预定距离处,当机器人30确定前方存在障碍物40时,驱动机器人30转弯。
[0062]
进一步的,对于上述第一实施方式,所述机器人30还被配置为对检测结果进行校验;具体的,所述机器人30还配置成在确定机器人30前方设置有障碍物40后沿行走路线继续行走,并且若机器人检测到的磁场信号强度不小于预设第二阈值时,则确认机器人30检测到障碍物40的结果正确,并驱动机器人30转向;其中,所述预设第二阈值大于所述预设第一阈值,且所述预设第二阈值不小于第一子导线段产生的磁场信号强度。
[0063]
本发明可实现方式中,所述预设第一阈值的范围可以设置为机器人处于第一子导线段远离障碍物一侧时,可以检测到的最大磁场信号强度和最小信号强度之间的任一磁场信号强度数值;所述预设第二阈值的范围可以设置为预设第一阈值和机器人处于第一子导线段21和第二子导线段22之间最大磁场信号强度之间的任一磁场信号强度数值。
[0064]
当然,机器人检测到的磁场信号强度和方向通常可通过内部单片机将其转换为电流信号或电压信号进行输出;该具体示例以转换为电压信号为例,在图1中a点位置,检测到的磁场强度信号较弱,近乎于没有,其对应输出的电压信号如图2a所示,在图1中b点位置,检测到很强的磁场强度信号,其输出的电压信号如图2b所示;另外,在该示例中,波峰波谷代表磁场信号的方向,在此不做进一步的赘述。
[0065]
较佳的,本发明第二实施方式中,所述机器人30还配置成当检测到磁场信号,且检测到磁场信号的方向与第一子导线段21产生的磁场信号方向相同时,以当前时刻为起始,若在预设时间内,检测到磁场信号方向相反,则确定机器人30前方设置有障碍物40。
[0066]
如图2a和图2b中所示,两图中显示的波形方向相反,即表示检测到图2中a点和b点的磁场信号方向相反,则确定前方遇到障碍物。
[0067]
结合图3所示,本发明一实施方式提供一种基于磁场信号的机器人避障方法,所述方法包括:s1、在机器人行走路线上、且位于障碍物的预设距离处设置避障单元;所述避障单元产生具有预定方向的磁场信号;s2、机器人行进过程中,根据所述避障单元产生的磁场信号的强弱及方向确定机器人是否遇到障碍物。
[0068]
本发明具体实施方式中,当工作区域确定后,为机器人规划行走路线,并在机器人启动后,驱动机器人按照设定的行走路线行走,该技术在现有技术中已经较为成熟,在此不做详细赘述。
[0069]
较佳的,结合图1所示,对于步骤s1,本发明第一较佳实施方式中,设置的所述避障单元包括:脉冲电流发生器10,连接所述脉冲电流发生器10且形成闭合电流回路的单根电导线20;所述电导线20包括:以所述电导线20对折后,形成依次相互连接的第一子导线段21、第二子导线段22和第三子导线段23;其中,所述电导线20折弯部分形成所述第二子导线段22;所述第一子导线段21和所述第三子导线段23分别连接所述脉冲电流发生器10,且其之间相互平行排布,电流流向相反。
[0070]
需要说明的是,所述单根电导线20的具体结构可以参照上述对机器人系统的描
述,在此不做进一步的赘述。
[0071]
对于步骤s2,本发明第一实施方式中,设置所述第三子导线段23排布在所述第一子导线段21和所述障碍物之间;当机器人检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同,且检测到磁场信号的强度不小于预设第一阈值时,确定机器人前方设置有障碍物。
[0072]
较佳的,对于上述第一实施方式,在确定机器人前方设置有障碍物后,所述方法还包括:对检测结果进行校验,具体的,驱动机器人沿行走路线继续行走,若机器人检测到的磁场信号强度不小于预设第二阈值时,则确认机器人检测到障碍物的结果正确,并驱动机器人转向;所述预设第二阈值大于所述预设第一阈值,且所述预设第二阈值不小于第一子导线段产生的磁场信号强度。
[0073]
在上述步骤s1提供的障碍物基础上,对于步骤s2,本发明提供的第二实施方式的基于磁场信号的机器人避障方法包括:当机器人处于第一子导线段远离障碍物一侧时检测到磁场信号,且检测到磁场信号的方向与第一子导线段产生的磁场信号方向相同时,以当前时刻为起始机器人继续行走一段时间,若在预设时间内,检测到磁场信号方向相反,则确定机器人前方设置有障碍物。
[0074]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述方法具体工作过程中所涉及的避障单元,可以参考前述机器人系统的对应结构及工作原理,在此不再赘述。
[0075]
综上所述,本发明的机器人系统及基于磁场信号的机器人避障方法,在障碍物附近设置避障单元,通过避障单元中相互平行排布且电流方向相反的子导线段产生具有预定方向的磁场信号,机器人行走过程中,通过检测避障单元产生的磁场信号及方向,确定行进路径上是否具有障碍物,有效辅助机器人识别避障盲区,提高机器人对障碍物的识别精度,达到更好避障的效果。
[0076]
在本技术所提供的几个实施方式中,应该理解到,所揭露的模块,系统和方法,均可以通过其它的方式实现。以上所描述的系统实施方式仅仅是示意性的,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个模块或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
[0077]
所述作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理模块,即可以位于一个地方,或者也可以分布到多个网络模块上,可以根据实际的需要选择其中的部分或者全部模块来实现本实施方式方案的目的。
[0078]
另外,在本技术各个实施方式中的各功能模块可以集成在一个处理模块中,也可以是各个模块单独物理存在,也可以2个或2个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用硬件加软件功能模块的形式实现。
[0079]
最后应说明的是:以上实施方式仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施方式对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施方式技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。