1.本发明涉及一种线性位移校正方法,特别是涉及一种用以校正移动件线性位移大小的线性位移校正方法及使用线性位移校正方法的检测设备。
背景技术:
2.现有光学检测设备通过一驱动机构驱动一载台直线移动,使得载台能带动所承载的一待测物通过一光学摄像机,以供光学摄像机获取待测物的图像。光学检测设备还会通过一线性编码器的一读取头读取一光学尺的刻度并反馈至一控制器,使控制器依据刻度控制驱动机构驱动载台移动的速度及行程。
3.然而,驱动机构的细部元件之间的组装公差、驱动机构与载台之间的组装公差、读取头与光学尺之间的组装公差,或者是光学尺的多个刻度之间的公差等皆会影响线性编码器量测载台移动距离的准确性,使得控制器驱动载台移动的速度会产生过慢或过快的情形,从而导致光学摄像机获取到的待测物图像产生形变,在后续要进行拼接时,会造成图像失真甚至是无法拼接等问题。
技术实现要素:
4.因此,本发明的一目的,在于提供一种能够克服背景技术的至少一个缺点的线性位移校正方法。
5.本发明的目的及解决背景技术问题是采用以下技术方案来实现的,依据本发明提出的线性位移校正方法包括下述步骤:
6.通过位移传感器量测移动件沿直线方向移动的位移,以获得多个第一量测距离;
7.通过校正量测装置量测所述移动件沿所述直线方向移动的位移,以获得多个第二量测距离;
8.根据所述第一量测距离及所述第二量测距离建立相对关系对照表,以使所述第一量测距离分别与所述第二量测距离相对应;及
9.由所述相对关系对照表中获得各所述第一量测距离所对应的所述第二量测距离作为校正距离。
10.根据前述的线性位移校正方法,其中,所述校正量测装置包括激光干涉仪。
11.根据前述的线性位移校正方法,其中,所述线性位移校正方法使用查表法由所述相对关系对照表中获得各所述第一量测距离所对应的所述第二量测距离。
12.本发明的目的及解决背景技术问题是采用以下技术方案来实现的,依据本发明提出的线性位移校正方法包括下述步骤:
13.通过驱动机构驱动移动件沿直线方向移动;
14.通过位移传感器量测所述移动件沿所述直线方向移动的位移,通过校正量测装置量测所述移动件沿所述直线方向移动的位移,通过运算处理模块接收所述位移传感器所反馈的电子信号以运算出多个第一量测距离,以及接收所述校正量测装置所反馈的电子信号
以运算出多个第二量测距离;
15.所述运算处理模块根据所述第一量测距离及所述第二量测距离建立相对关系对照表,以使所述第一量测距离分别与所述第二量测距离相对应;及
16.所述运算处理模块由所述相对关系对照表中获得各所述第一量测距离所对应的所述第二量测距离作为校正距离。
17.根据前述的线性位移校正方法,其中,所述校正量测装置包括激光干涉仪,所述位移传感器包括线性编码器。
18.根据前述的线性位移校正方法,其中,所述运算处理模块使用查表法由所述相对关系对照表中获得各所述第一量测距离所对应的所述第二量测距离。
19.本发明的一目的,在于提供一种能够克服背景技术的至少一个缺点的检测设备。
20.本发明的目的及解决背景技术问题是采用以下技术方案来实现的,依据本发明提出的检测设备包括移动件、驱动机构、位移传感器、校正量测装置及运算处理模块。所述驱动机构用以驱动所述移动件沿直线方向移动。所述位移传感器用以量测所述移动件沿所述直线方向移动的位移。所述校正量测装置用以量测所述移动件沿所述直线方向移动的位移。所述运算处理模块电连接于所述位移传感器及所述校正量测装置,所述运算处理模块用以接收所述位移传感器所反馈的电子信号以运算出多个第一量测距离,以及用以接收所述校正量测装置所反馈的电子信号以运算出多个第二量测距离。所述运算处理模块根据所述第一量测距离及所述第二量测距离建立相对关系对照表。
21.根据前述的检测设备,其中,所述位移传感器包括线性编码器,所述校正量测装置包括激光干涉仪。
22.根据前述的检测设备,其中,所述校正量测装置包括沿所述直线方向相间隔排列的校正光束收发模块、第一光学模块及第二光学模块,所述第二光学模块设置在所述移动件上并能被所述移动件带动而相对于所述校正光束收发模块及所述第一光学模块移动。
23.根据前述的检测设备,其中,所述校正量测装置包括沿所述直线方向相间隔排列的校正光束收发模块、第一光学模块及第二光学模块,所述第一光学模块设置在所述移动件上并能被所述移动件带动而相对于所述校正光束收发模块及所述第二光学模块移动。
24.根据前述的检测设备,其中,所述检测设备还包括电连接于所述运算处理模块的图像处理模块,所述运算处理模块能使用查表法由所述相对关系对照表中获得各所述第一量测距离所对应的所述第二量测距离,作为用以输入至所述图像处理模块的运算参数。
25.本发明的有益效果在于:通过校正量测装置量测移动件沿直线方向移动的位移,以获得第二量测距离的方式,使得运算处理模块能建立第一量测距离与第二量测距离的相对关系对照表,并在实际进行光学检测时使用查表法进行线性位移校正,从而提升校正的速度及效率。通过将作为校正距离的第二量测距离输入至图像处理模块作为运算参数,使得图像处理模块能将区域图像拼接为不失真的完整图像。将校正量测装置组装在机台、移动件及地面,在不需调整或变更检测设备的相关组成结构的前提下,便能使检测设备进行校正程序,从而提升组装及使用上的便利性。检测设备不需采用高阶且价格昂贵的编码器就能达到线性位移校正的功效,因此,能降低检测设备的制造成本。
附图说明
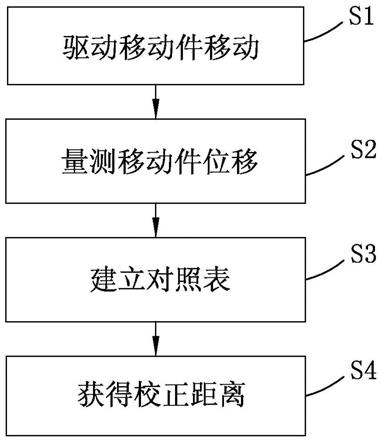
26.图1是本发明线性位移校正方法之第一实施例的一校正步骤流程图;
27.图2是使用第一实施例的一检测设备的一俯视图;
28.图3是使用第一实施例的检测设备的一侧视图;
29.图4是使用第一实施例的检测设备的一连接关系方块图;
30.图5是使用第一实施例的检测设备的另一俯视图;
31.图6是使用第一实施例所建立的一相对关系对照表;
32.图7是使用本发明线性位移校正方法之第二实施例的检测设备的一俯视图;及
33.图8是使用第二实施例的检测设备的一侧视图。
具体实施方式
34.下面结合附图及实施例对本发明进行详细说明。
35.参阅图1及图2,本发明线性位移校正方法的第一实施例,包括下述校正步骤。步骤s1:驱动移动件移动、步骤s2:量测移动件位移、步骤s3:建立对照表、及步骤s4:获得校正距离。线性位移校正方法用于校正一检测设备100的线性位移,在本案第一实施例中,检测设备100是以一光学检测设备为例,检测设备100也可以是其他任何需要校正线性位移的设备,不以光学检测用途为限。
36.参阅图2、图3及图4,在本案第一实施例中,检测设备100包括一机台1、一移动件2、一驱动机构3、一图像获取装置4、一位移传感器5、一校正量测装置6、一运算处理模块7及一图像处理模块8。机台1包括一顶面11、一设置在顶面11的导轨12、一前端13,及一相反于前端13的后端14。导轨12沿一由前朝后的直线方向d延伸。移动件2是以一用以承载一待测物(图未示)的载台为例,移动件2能滑动地连接于导轨12并可被操作而沿直线方向d移动。驱动机构3包括一马达31、一螺杆32及一联轴器33。马达31设置在机台1的顶面11。螺杆32连接于马达31并能被马达31驱动而旋转,螺杆32沿直线方向d延伸且位于导轨12一侧。联轴器33设置在移动件2一侧且螺接于螺杆32。因此,马达31驱动螺杆32旋转时,螺杆32能通过联轴器33带动移动件2在导轨12上移动。
37.在本案第一实施例中,图像获取装置4是以一线扫描摄像机(line-scan camera)为例,但不以此为限,图像获取装置4设置在机台1的导轨12上方,用以获取被移动件2所承载而移动的待测物的图像。位移传感器5是以一线性编码器为例,但不以此为限,位移传感器5用以量测移动件2沿直线方向d移动的位移。位移传感器5包括一光学尺51及一读取头52。光学尺51设置在机台1的顶面11且位在导轨12相反于螺杆32的一侧。读取头52设置在移动件2相反于联轴器33的一侧且位在光学尺51上方,读取头52用以读取光学尺51的多个刻度(图未示)中的对应刻度,以将刻度转换成对应的电子信号。在本案第一实施例的其他实施方式中,位移传感器5相对于其他组件的配置位置不以上述为限,可依设计需求而变更。
38.在本案第一实施例中,校正量测装置6是以一激光干涉仪为例,但不以此为限,校正量测装置6用以量测移动件2沿直线方向d移动的位移。校正量测装置6包括一校正光束收发模块61、一第一光学模块62及一第二光学模块63。校正光束收发模块61包括一支架611及一校正光束收发头612。支架611是以一用以撑立于一地面9上的三脚架为例,但不以此为限。支架611与机台1的前端13相间隔一段适当距离。校正光束收发头612设置在支架611,用
以发射及接收如激光的校正光束。第一光学模块62包括一第一导磁金属片621、一第一磁吸架622、一分光镜623及一第一反射镜624。第一导磁金属片621例如通过螺丝锁固在机台1的顶面11且邻近于前端13。第一磁吸架622通过磁力吸附在第一导磁金属片621以固定在第一导磁金属片621上。分光镜623设置在第一磁吸架622一侧且邻近第一磁吸架622顶端,分光镜623对齐于校正光束收发头612后方,用以将校正光束收发头612所射出的校正光束分成两束校正光。第一反射镜624设置在分光镜623的一侧,且分光镜623位在第一磁吸架622与第一反射镜624之间,第一反射镜624用以将分光镜623所分出的其中一束校正光反射回分光镜623。
39.第二光学模块63包括一第二导磁金属片631、一第二磁吸架632及一第二反射镜633。第二导磁金属片631例如通过螺丝锁固在移动件2顶面。第二磁吸架632通过磁力吸附在第二导磁金属片631以固定在第二导磁金属片631上。第二反射镜633设置在第二磁吸架632前侧且邻近第二磁吸架632顶端、并对齐于分光镜623后方,使得校正光束收发头612、分光镜623及第二反射镜633沿直线方向d相间隔排列。第二反射镜633用以将分光镜623所分出的另一束校正光反射回分光镜623。校正光束收发头612用以接收反射至分光镜623并且通过分光镜623的校正光束,以将校正光束转换成对应的电子信号。
40.值得注意的是,在本案第一实施例中,第一光学模块62以及第二光学模块63是利用磁吸方式分别固定在机台1与移动件2上,在其他实施方式中,第一光学模块62以及第二光学模块63可利用其他方式固定在机台1与移动件2上,不以前述磁吸方式为限。
41.运算处理模块7电连接于位移传感器5的读取头52以及校正量测装置6的校正光束收发头612。运算处理模块7用以接收读取头52所反馈的电子信号以及校正光束收发头612所反馈的电子信号。图像处理模块8电连接于图像获取装置4及运算处理模块7,用以接收图像获取装置4所获取的待测物的多个区域图像,以将区域图像拼接为一完整图像。
42.以下针对检测设备100使用本案第一实施例的线性位移校正方法来运作进行详细说明:
43.参阅图1、图2及图5,在步骤s1中,通过驱动机构3的马达31驱动螺杆32旋转,使螺杆32通过联轴器33带动移动件2由一初始位置(如图2所示)沿直线方向d移动至一临界位置(如图5所示)。
44.参阅图1、图4及图5,在移动件2移动的过程中进行步骤s2,通过位移传感器5量测移动件2沿直线方向d移动的位移。通过读取头52读取光学尺51的对应刻度以将刻度转换成对应的电子信号,并将电子信号反馈至运算处理模块7。同时,通过校正量测装置6量测移动件2沿直线方向d移动的位移。校正光束收发头612所射出的校正光束通过分光镜623并分成两束校正光,校正光分别被固定的第一反射镜624及移动的第二反射镜633反射回来并会合在分光镜623上而产生干涉条纹。第二反射镜633移动时,校正光束收发头612会将干涉条纹的光强变化转换成电子信号并反馈至运算处理模块7。运算处理模块7接收读取头52所反馈的电子信号以运算出对应的一第一量测距离,接收校正光束收发头612所反馈的电子信号以运算出对应的一第二量测距离。
45.移动件2移动的过程中,图像获取装置4会依序地获取待测物的多个区域图像并将区域图像反馈至图像处理模块8。当移动件2移动到临界位置时,驱动机构3即停止驱动移动件2移动。在移动件2由初始位置移动至临界位置的过程中,运算处理模块7通过读取头52所
反馈的电子信号运算出多个第一量测距离d1~dn(如图6所示),并且通过校正光束收发头612所反馈的电子信号运算出多个第二量测距离d1~dn(如图6所示)。
46.参阅图1、图4及图6,随后进行步骤s3,运算处理模块7根据第一量测距离d1~dn及第二量测距离d1~dn建立一相对关系对照表71,相对关系对照表71具有一第一量测距离栏位711,及一第二量测距离栏位712。第一量测距离栏位711用以显示出第一量测距离d1~dn,而第二量测距离栏位712用以显示出第二量测距离d1~dn。因此,使得第一量测距离d1~dn分别与第二量测距离d1~dn相对应。在相对关系对照表71建立后,运算处理模块7即储存相对关系对照表71。
47.在步骤s4中,运算处理模块7例如使用查表法由相对关系对照表71中获得各第一量测距离d1~dn所对应定的第二量测距离d1~dn。例如当运算处理模块7所得到的第一量测距离为d2时,使用查表法获得对应的第二量测距离为d2,并以第二量测距离d2作为一校正距离,第二量测距离d2为一用以输入至图像处理模块8的运算参数。运算处理模块7通过查表法获得校正距离的方式,能降低运算时间及负载,以提升校正的速度及效率。
48.由于图像处理模块8将图像获取装置4所获取的区域图像进行拼接时,区域图像之间的相对位置及距离是影响拼接后的完整图像是否失真的重要因素,因此,通过将作为校正距离的对应的第二量测距离d1~dn输入至图像处理模块8作为运算参数,使得区域图像之间的相对位置及距离不会受到位移传感器5的量测准确性影响,因此,使得图像处理模块8能将区域图像拼接为不失真的完整图像。
49.参阅图7及图8,本发明线性位移校正方法之第二实施例的步骤流程与第一实施例大致相同,不同处在于校正量测装置6的组装方式。
50.在本案第二实施例中,第一光学模块62的第一导磁金属片621通过螺丝锁固在移动件2顶面,使得第一光学模块62设置在移动件2上。第二光学模块63的第二导磁金属片631通过螺丝锁固在机台1的顶面11且邻近于后端14,使得第二光学模块63设置在机台1上。因此,第一光学模块62能被移动件2带动而相对于校正光束收发模块61及第二光学模块63移动。
51.归纳上述,各实施例的线性位移校正方法,通过校正量测装置6量测移动件2沿直线方向d移动的位移,以获得第二量测距离d1~dn的方式,使得运算处理模块7能建立相对关系对照表71并使用查表法获得各第一量测距离d1~dn所对应的第二量测距离d1~dn,并将第二量测距离d1~dn作为校正距离。因此,能提升校正的速度及效率。通过将作为校正距离的对应的第二量测距离d1~dn输入至图像处理模块8作为运算参数,使得图像处理模块8能将区域图像拼接为不失真的完整图像。此外,将校正量测装置6组装在机台1、移动件2及地面9,在不需调整或变更检测设备100的相关组成结构的前提下,便能使检测设备100进行线性位移校正,因此,能提升组装及使用上的便利性。再者,检测设备100不需采用高阶且价格昂贵的编码器就能达到线性位移校正的功效,因此,能降低检测设备100的制造成本,确实能达到本发明所诉求的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。