1.本实用新型涉及雷达测试技术领域,尤其涉及一种双机械臂整车雷达天线罩测试系统。
背景技术:
2.毫米波雷达安装于整车时,形成两个结构,第一蒙皮和第二蒙皮。其中,雷达模块本身的,天线前方的非金属遮挡物称为第一蒙皮;雷达模块前方的保险杠或车辆标志称为第二蒙皮。
3.目前,对安装于整车的毫米波雷达进行测试时,通常是将雷达、第一蒙皮、第二蒙皮分离出来做测试,分离出来进行测试。但是,这种测试存在的问题是:
4.第一、实际应用环境发生变化,不是实际的应用环境,测试结果有问题;
5.第二、这种测试方式,需要将第二蒙皮的一部分从整车上裁剪下来,破坏被测件。但是若不裁剪,第二蒙皮整体工装又是难题,这是因为:
6.1)、第二蒙皮柔性大,很软,容易变形(比如弯折),变形后的第二蒙皮测试下获得测试结果与不变形又不相同;
7.2)、第二蒙皮长度在两米左右,其并不适合放在旋转的转台上,但在测试时,但实际测试过程需要旋转。
8.因此,如何在整车雷达、第一蒙皮、第二蒙皮的使用场景下完成雷达威力图、天线方向图、蒙皮电厚度均匀性的整车保险杠测试,获得测试雷达模块天线与第一蒙波组合的方向图畸变优化,以及雷达模块天线与第一蒙皮加第二蒙皮后整体的方向图畸变优化,是本领域技术人员亟需解决的技术问题。
技术实现要素:
9.本实用新型旨在提供一种双机械臂整车雷达天线罩测试系统,以使整车雷达在第一蒙皮和第二蒙皮的使用场景下完成雷达威力图、天线方向图、蒙皮电厚度均匀性的整车保险杠测试。
10.本实用新型公开了一种双机械臂整车雷达天线罩测试系统,包括:第一机械臂、第二机械臂、支撑平台和控制系统;所述第一机械臂、所述第二机械臂和所述支撑平台设置于微波暗室中;所述支撑平台上放置有从整车上拆卸的作为待测件的毫米波雷达第一蒙皮或第二蒙皮;所述第一蒙皮为雷达模块前面的雷达天线罩;所述第一蒙皮为非金属遮挡物;所述第二蒙为所述雷达模块前端的保险杠或车辆标志;所述第一机械臂和所述第二机械臂设置于所述待测件的两侧;所述控制系统与所述第一机械臂和所述第二机械臂均通过电信号连接,用于根据测试目标控制所述第一机械臂和所述第二机械臂的运动。
11.进一步地,上述双机械臂整车雷达天线罩测试系统中,所述第一机械臂安装有测试接收天线;所述第二机械臂安装有发射天线;所述第二机械臂的发射天线的法线实时对准于所述第一机械臂的测试接收天线的法线;所述支撑平台上放置有所述第二蒙皮。
12.进一步地,上述双机械臂整车雷达天线罩测试系统中,所述第一机械臂安装有雷达目标模拟器射频前端;所述第二机械臂安装有所述毫米波雷达;所述支撑平台上放置有所述第二蒙皮;所述控制系统控制所述第一机械臂以所述毫米波雷达为圆心进行旋转以获得所述毫米波雷达的雷达威力图。
13.进一步地,上述双机械臂整车雷达天线罩测试系统中,所述第一机械臂安装有测试接收天线;所述第二机械臂安装有雷达pcb板;所述支撑平台上设置有所述第一蒙皮;所述控制系统控制所述第一机械臂以所述雷达pcb板为圆心进行旋转以获得所述雷达pcb板的雷达威力图和天线方向图。
14.进一步地,上述双机械臂整车雷达天线罩测试系统中,所述第一机械臂与所述第二机械臂之间的距离为50厘米至100厘米之间。
15.进一步地,上述双机械臂整车雷达天线罩测试系统中,还包括吸波板;所述吸波板为圆弧形立板,所述圆弧形立板包括正面板,第一侧板、第二侧板、连接与所述正面板与所述第一侧板之间的第一斜板,以及,连接于所述正面板与所述第二侧板与之间的第二斜板;并且,所述第一侧板、所述第一斜板、所述正面板、所述第二斜板与所述第二侧板依次连接,形成与地面垂直的处于所述第一机械臂外围的圆弧形立板;所述圆弧形立板的表面覆盖有吸波材料。
16.进一步地,上述双机械臂整车雷达天线罩测试系统中,所述测试接收天线和所述发射天线均为喇叭天线。
17.本实用新型双机械臂整车雷达天线罩测试系统借助第一机械臂和第二机械臂,对放置于支撑平台的从整车上拆卸的、第一蒙皮和第二蒙皮作为整体的待测件进行综合测试,实现如下几个方面的功能:
18.功能一、位于第一机械臂和第二机械臂之间的支撑平台上放置有第二蒙皮,第一机械臂安装有测试接收天线,可以借助夹持测试接收天线的机械臂多个自由度的运动,并与第二机械臂实时对准,测试第二蒙皮的电厚度均匀性,也就是通常的汽车保险杆的电厚度均匀性。
19.功能二、第一机械臂装雷达目标模拟器射频前端,第二机械臂装雷达模块,中间支撑平台是第二蒙皮;第二机械臂和第二蒙皮调整好相对位置后就不动了,第一机械臂以雷达为圆心旋转测试雷达威力图,实现测试雷达模块与第二蒙皮的匹配优化。
20.功能三、第一机械臂装测试接收天线,第二机械臂装雷达pcb板,中间支撑平台装第一蒙皮,第二机械臂和第一蒙皮调整好相对位置后就不动了,第一机械臂以雷达pcb板为圆心旋转测试雷达pcb板的天线方向图,进而测出测试雷达pcb板与第一蒙皮的匹配优化。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1是本实用新型双机械臂整车雷达天线罩测试系统实施例中,第一机械臂的示意图;
23.图2是本实用新型双机械臂整车雷达天线罩测试系统实施例中,第二机械臂的示意图;
24.图3是本实用新型双机械臂整车雷达天线罩测试系统实施例的俯视图;
25.图4是本实用新型双机械臂整车雷达天线罩测试系统实施例的立体结构示意图;
26.图5是本实用新型双机械臂整车雷达天线罩测试系统实施例中,在第一机械臂设置吸波板的结构示意图。
27.附图标记说明:
[0028]1ꢀꢀꢀ
第一机械臂
[0029]2ꢀꢀꢀ
第二机械臂
[0030]3ꢀꢀꢀ
支撑平台
[0031]4ꢀꢀꢀ
测试接收天线
[0032]5ꢀꢀꢀ
发射天线
[0033]6ꢀꢀꢀ
待测件
[0034]7ꢀꢀꢀ
圆弧形立板
[0035]
71
ꢀꢀ
正面板
[0036]
72
ꢀꢀ
第一侧板
[0037]
73
ꢀꢀ
第二侧板
[0038]
74
ꢀꢀ
第一斜板
[0039]
75
ꢀꢀ
第二斜板
具体实施方式
[0040]
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0041]
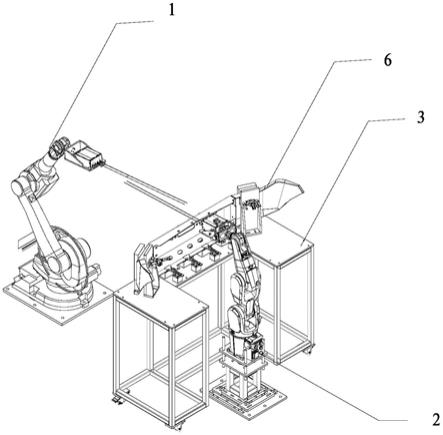
参照图1至图4,示出了本实用新型双机械臂整车雷达天线罩测试系统一个实施例的立体结构示意图、俯视图,以及第一机械臂、第二机械臂的结构示意图。
[0042]
参照图3,本实施例双机械臂整车雷达天线罩测试系统包括
[0043]
第一机械臂1、第二机械臂2、支撑平台3和控制系统。第一机械臂1、第二机械臂2和支撑平台3设置于微波暗室中(未示出)。支撑平台3上放置有从整车上拆卸的作为待测件6的第一蒙皮或第二蒙皮;第一蒙皮为雷达模块前面的雷达天线罩;第一蒙皮为非金属遮挡物;第二蒙为雷达模块前端的保险杠或车辆标志。第一机械臂1和第二机械2臂设置于待测件6的两侧;控制系统与第一机械臂1和第二机械臂2均通过电信号连接,用于根据测试目标控制第一机械臂1 和第二机械臂2的运动。
[0044]
测试场景一:
[0045]
上述双机械臂整车雷达天线罩测试系统中,第一机械臂1安装有测试接收天线4;第二机械臂2安装有发射天线5;第二机械臂2的发射天线5的法线实时对准于第一机械臂1的测试接收天线4的法线;支撑平台3上放置有第二蒙皮。
[0046]
在上述测试场景下,可以实现如下功能:
[0047]
位于第一机械臂1和第二机械臂2之间的支撑平台3上放置有第二蒙皮,第一机械臂1安装有测试接收天线4,可以借助夹持测试接收天线4的机械臂多个自由度的运动与第二机械臂2实时对准,测试第二蒙皮的电厚度均匀性,也就是通常的汽车保险杆的电厚度均匀性。
[0048]
第一机械臂1安装有测试接收天线4;第二机械臂2安装有发射天线5。测试接收天线4和发射天线5均可以为喇叭天线。
[0049]
测试场景二:
[0050]
第一机械臂1安装有雷达目标模拟器射频前端;第二机械臂安装有毫米波雷达;支撑平台3上放置有第二蒙皮;控制系统控制第一机械臂以毫米波雷达为圆心进行旋转以获得毫米波雷达的雷达威力图。
[0051]
在上述测试场景下,可以实现如下功能:
[0052]
第一机械臂1装雷达目标模拟器射频前端,第二机械臂2装雷达模块,中间支撑平台3是第二蒙皮;第二机械臂2和第二蒙皮调整好相对位置后就不动了,第一机械臂1以雷达为圆心旋转测试雷达威力图,实现测试雷达模块与第二蒙皮的匹配优化。
[0053]
测试场景三:
[0054]
第一机械臂1安装有测试接收天线;第二机械臂2安装有雷达 pcb板;支撑平台3上设置有第一蒙皮;控制系统控制第一机械臂1 以雷达pcb板为圆心进行旋转以获得雷达pcb板的雷达威力图。
[0055]
在上述测试场景下,可以实现如下功能:
[0056]
第一机械臂1装测试接收天线,第二机械臂2装雷达pcb板,中间支撑平台3装第一蒙皮,第二机械臂和第一蒙皮调整好相对位置后就不动了,第一机械臂1以雷达pcb板为圆心旋转测试雷达pcb 板的天线方向图,进而测出测试雷达pcb板与第一蒙皮的匹配优化。
[0057]
在一个优选的实施例中,第一机械臂1与第二机械臂2之间的距离为50厘米至100厘米之间。第一机械臂1和第二机械臂2之间的距离不能太近,因为若距离太近,两支机械臂的金属会产生多径反射,就会影响测试结果。当二者距离在50cm~100cm以内,则影响可以忽略。
[0058]
参照图5,是本实用新型双机械臂整车雷达天线罩测试系统实施例中,在第一机械臂设置吸波板的结构示意图。
[0059]
可以看出,在本双机械臂整车雷达测试系统实施例中,还包括吸波板。该吸波板为圆弧形立板7。圆弧形立板7包括正面板71,第一侧板72、第二侧板73、连接与正面板71与第一侧板72之间的第一斜板74,以及,连接于正面板71与第二侧板73与之间的第二斜板 75。并且,第一侧板72、第一斜板74、正面板71、第二斜板75与第二侧板73依次连接,形成与地面垂直的处于第一机械臂1外围的圆弧形立板7;圆弧形立板7的表面覆盖有吸波材料。需要补充说明的是,电厚度是指对任意的测试入射角来说,在第二蒙皮法线方向上的介质层的波数。
[0060]
本实施例通过调整第二蒙皮电厚度分布,降低瞄准误差,改善第二蒙皮方向图。
[0061]
最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:
其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。