1.本实用新型涉及物流设备技术领域,尤其涉及一种机械臂装置及机器人。
背景技术:
2.机械手(机器人)是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。在科学技术高速发展的今天,工业机器人实现了普及应用,尤其是在工业生产领域,工业制造、机械制造行业的部分工业生产链已经完全由工业机器人组成,工作人员仅需通过程序控制,即可在规定时间内保质保量的完成生产任务。机械臂作为工业机器人的核心,受到了技术人员的高度关注。
3.现有技术中机械臂通常由舵机控制,这种机械臂虽有着结构简单、易于编程、加工精度要求较低的优势,但真正使用起来时,它的缺点便暴露无遗。
4.首先是电机承受的扭矩过大,易损害电机。传统的舵机机械臂在机械臂的关节处安装电机以实现旋转,但越是底部的电机所要承受的扭矩就越大,这种压力在机械臂抓取物品后及移动过程时更加明显。在这种高压情况下,舵机极容易损坏。
5.其次,舵机机械臂的机械爪无法一直维持水平。由于机械爪的角度完全是由控制几个舵机旋转的角度之差所得出的,每有单独一个舵机移动,其机械爪的角度必然改变。
6.本背景技术所公开的上述信息仅仅用于增加对本技术背景技术的理解,因此,其可能包括不构成本领域普通技术人员已知的现有技术。
技术实现要素:
7.针对背景技术中指出的问题,本实用新型提出一种机械臂装置及机器人,通过齿轮组件来传输扭矩,电机组尽量放置在机械臂的底部、且不直接承重,降低电机组所受压力,提高电机组的可靠性及使用寿命,稳定性更高;连杆型机械臂架构能够在一定范围内稳定的抓取物品、并保持物品水平朝上,提高抓取可靠性。
8.为实现上述实用新型目的,本实用新型采用下述技术方案予以实现:
9.本实用新型提供一种机械臂装置,其特征在于,包括:
10.底盘和旋转座,所述旋转座位于所述底盘的上方;
11.第一驱动部,其包括第一电机和设于所述第一电机的动力输出端的第一齿轮组,所述第一电机与所述底盘连接,所述第一齿轮组与所述旋转座连接;
12.第二驱动部,其包括第二电机和设于所述第二电机的动力输出端的第二齿轮组,所述第二驱动部与所述旋转座连接;
13.连杆臂组件,其一端与所述第二齿轮组连接,所述连杆臂组件还具有与所述旋转座铰接的第一连杆;
14.机械爪组件,其设于所述连杆臂组件的另一端。
15.本技术一些实施例中,所述第一齿轮组件包括相互啮合的第一主动齿轮和第一从动齿轮,所述第一主动齿轮与所述第一电机的动力输出端连接,所述第一从动齿轮固定设
于所述旋转座的底部。
16.本技术一些实施例中,所述第二齿轮组件包括相互啮合的第二主动齿轮和第二从动齿轮,所述第二主动齿轮与所述第二电机的动力输出端连接,所述第二从动齿轮转动设于所述旋转座上。
17.本技术一些实施例中,所述连杆臂组件包括铰接的第一主杆和第二主杆,所述第一主杆的一端与所述第二从动齿轮的转轴连接,所述第二主杆的一端与所述机械爪组件铰接;
18.所述连杆臂组件还包括第二连杆、第三连杆、第一连接件以及第二连接件;
19.所述第一连接件铰接设于所述第一主杆和所述第二主杆的铰接位置处;
20.所述第一连杆的另一端与所述第一连接件铰接;
21.所述第二连杆的一端与所述第一连接件铰接、另一端与所述机械爪组件铰接;
22.所述第二连接件与所述第二从动齿轮的转轴连接;
23.所述第三连杆的一端与所述第二连接件铰接、另一端与所述第二主杆铰接。
24.本技术一些实施例中,所述第二驱动部配置有两套,分设于所述旋转座的两侧。
25.本技术一些实施例中,所述机械爪组件包括第一安装架、第二安装架、两个相对设置的机械爪以及第三驱动部,所述第三驱动部用于驱动两个所述机械爪相互靠近或远离;
26.所述第一安装架与所述第二安装架可拆卸连接,所述连杆臂组件与所述第一安装架铰接,所述机械爪和所述第三驱动部均设于所述第二安装架上。
27.本技术一些实施例中,所述第三驱动部包括第三电机、第三主动齿轮以及两个相互啮合的第三从动齿轮;
28.其中一个所述第三从动齿轮与所述第三主动齿轮啮合、并与其中一个所述机械爪连接;
29.另一个所述第三从动齿轮与另一个所述机械爪连接。
30.本技术一些实施例中,所述底盘的材质为金属。
31.本技术一些实施例中,所述第一电机设于所述底盘靠后的位置。
32.本实施例还公开一种机器人,包括如上所述的机械臂装置。
33.与现有技术相比,本实用新型的优点和积极效果是:
34.本技术所公开的机械臂装置通过齿轮组来传输扭矩,电机组尽量放置在连杆臂组件的底部、且不直接承重,降低电机组所受压力,提高电机组的可靠性及使用寿命,稳定性更高。
35.连杆型机械臂架构能够在一定范围内稳定的抓取物品、并保持物品水平朝上,提高抓取可靠性。
36.结合附图阅读本实用新型的具体实施方式后,本实用新型的其他特点和优点将变得更加清楚。
附图说明
37.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提
下,还可以根据这些附图获得其他的附图。
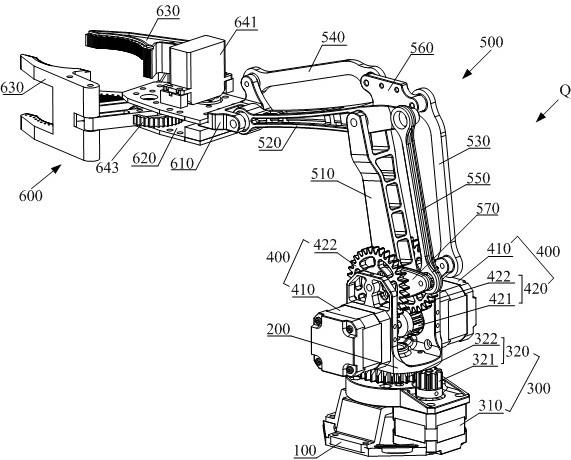
38.图1为根据实施例的机械臂装置的结构示意图;
39.图2为图1所示结构从q向观察到的结构示意图;
40.图3为根据实施例的机械爪组件的结构示意图(省略第一安装架和第二安装架)。
41.附图标记:
42.100-底盘;
43.200-旋转座;
44.300-第一驱动部,310-第一电机,320-第一齿轮组,321-第一主动齿轮,322-第一从动齿轮;
45.400-第二驱动部,410-第二电机,420-第二齿轮组,421-第二主动齿轮,422-第二从动齿轮;
46.500-连杆臂组件,510-第一主杆,520-第二主杆,530-第一连杆,540-第二连杆,550-第三连杆,560-第一连接件,570-第二连接件;
47.600-机械爪组件,610-第一安装架,620-第二安装架,630-机械爪,641-第三电机,642-第三主动齿轮,643-第三从动齿轮。
具体实施方式
48.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
49.在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
50.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
51.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
52.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅
表示第一特征水平高度小于第二特征。
53.下文的公开提供了许多不同的实施方式或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本实用新型。此外,本实用新型可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本实用新型提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
54.实施例一
55.本实施例公开一种机械臂装置,可应用于机器人。
56.参照图1和图2,该机械臂装置包括底盘100、旋转座200、第一驱动部300、第二驱动部400、连杆臂组件500以及机械爪组件600等。
57.底盘100用于与机器人固定连接,以将整个机械臂装置固定设于机器人上。
58.旋转座200位于底盘100的上方,旋转座200是整个机械臂装置的基盘,通过旋转座200的旋转,带动上部连杆臂组件500和机械爪组件600在水平面上的旋转。
59.第一驱动部300包括第一电机310和设于第一电机310的动力输出端的第一齿轮组320,第一电机310与底盘100固定连接,第一齿轮组320与旋转座200固定连接。
60.第一电机310带动第一齿轮组320转动,第一齿轮组320带动旋转座200在水平面内旋转。
61.第二驱动部400包括第二电机410和设于第二电机410的动力输出端的第二齿轮组420,第二驱动部400与旋转座200连接,具体为第二电机410与旋转座200固定连接,第二齿轮组420与旋转座200转动连接。
62.连杆臂组件500的一端与第二齿轮组420连接,另一端与机械爪组件600连接,连杆臂组件500还具有与旋转座200铰接的第一连杆530。
63.第二电机410带动第二齿轮组420转动,第二齿轮组420带动连杆臂组件500联动,连杆臂组件500带动机械爪组件600实现在水平方向上的前后运动以及竖直方向上的上下运动。
64.本实施例中的机械臂装置通过齿轮组来传输扭矩,电机组尽量放置在连杆臂组件的底部、且不直接承重,降低电机组所受压力,提高电机组的可靠性及使用寿命,稳定性更高。
65.连杆型机械臂架构能够在一定范围内稳定的抓取物品、并保持物品水平朝上,提高抓取可靠性。
66.本技术一些实施例中,第一齿轮组320包括相互啮合的第一主动齿轮321和第一从动齿轮322,第一主动齿轮321与第一电机310的动力输出端连接,第一从动齿轮322固定设于旋转座200的底部。
67.本技术一些实施例中,第二齿轮组420包括相互啮合的第二主动齿轮421和第二从动齿轮422,第二主动齿轮421与第二电机410的动力输出端连接,第二从动齿轮422转动设于旋转座200上。
68.本实施例中,第一主动齿轮321和第二主动齿轮421均选用9齿小齿轮,第一从动齿轮322和第二从动齿轮422均选用32齿大齿轮。
69.本技术一些实施例中,连杆臂组件500包括铰接的第一主杆510和第二主杆520,第一主杆510的一端与第二从动齿轮422的转轴连接,第二主杆520的一端与机械爪组件600铰接。
70.连杆臂组件500还包括第二连杆540、第三连杆550、第一连接件560以及第二连接件570。第一连接件560铰接设于第一主杆510和第二主杆520的铰接位置处。第一连杆530的另一端与第一连接件560铰接。第二连杆540的一端与第一连接件560铰接、另一端与机械爪组件600铰接。第二连接件570与第二从动齿轮422的转轴连接。第三连杆550的一端与第二连接件570铰接、另一端与第二主杆520铰接。
71.第二电机410运转,带动第一主杆510和第二连接件570运动,再联动其他主杆和连杆,使机械爪组件600实现水平方向的前后运动和竖直方向的上下运动,并且机械爪组件600可以做到保持水平。
72.本技术一些实施例中,第二驱动部400配置有两套,分设于旋转座200的两侧,两套第二驱动部400中的第二从动齿轮422同轴安装,第一主杆510和第二连接件570设于该轴上。
73.两套第二驱动部400的设置是为了提高载荷能力。
74.本技术一些实施例中,底盘100的材质为金属,在保证连杆臂组件500稳定运转的同时,将整个装置的重心下移,进一步增加稳定性。
75.本技术一些实施例中,第一电机310设于底盘100靠后的位置,也即,有助于进一步增加稳定性。
76.本技术一些实施例中,再结合图3,机械爪组件600包括第一安装架610、第二安装架620、两个相对设置的机械爪630以及第三驱动部,第三驱动部用于驱动两个机械爪630相互靠近或远离,以实现对货物的抓取或释放。
77.第一安装架610与第二安装架620可拆卸连接,连杆臂组件500与第一安装架610铰接,具体为第二主杆520的一端和第二连杆540的一端分别与第一安装架610铰接,机械爪630和第三驱动部均设于第二安装架620上。
78.通过第一安装架610与第二安装架620之间的可拆卸连接,可实现机械爪的可更换,以满足不同货物的抓取需求。
79.第三驱动部包括第三电机641和第三齿轮组,第三齿轮组包括第三主动齿轮642和两个相互啮合的第三从动齿轮643。
80.其中一个第三从动齿轮643与第三主动齿轮642啮合、并与其中一个机械爪630连接,另一个第三从动齿轮643与另一个机械爪630连接。
81.第三电机641运转,带动第三主动齿轮642转动,第三主动齿轮642带动与之啮合的第三从动齿轮643转动,该第三从动齿轮643再带动另一第三从动齿轮643转动,从而实现两个机械爪630的相互靠近或远离。
82.本实施例中,第一电机310和第二电机410选用步进电机,第三电机641为舵机。
83.实施例二
84.本实施例还公开了一种机器人,包括实施例一所公开的机械臂装置,底盘100固定设于机器人上。
85.本技术一些实施例中,机器人为工业移动机器人。
86.在上述实施方式的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
87.以上仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
