1.本实用新型涉及清洁设备技术领域,具体涉及一种用于水下清洗的可调刷盘结构及水下机器人。
背景技术:
2.当船舶在海上航行时,船底会附着各种藤壶、贻贝、藻类和其他生物。附着在船底的生物会增加船舶航行的阻力,需要耗费更多燃料维持速度,增加了碳排放量,同时,附着在船底的生物也会腐蚀船体表面的涂层,降低船舶的使用寿命,而且附着的生物随着船舶全球航行,会给不同海域造成生物入侵,破坏当地所在海域的生物多样性。
3.对于船体、岸壁、水下基础设施等表面的清洗维护,以往主要采用潜水员人工清洗。但人工清洗方式工人的劳动强度大,工作条件差,可持续作业时间短、安全性差、尤其是施工质量难以保证,效率也难以提高。为了克服人工水下清洗作业的种种弊端,以及行业对人工智能技术的引进发展,水下机器人代替人工进行清洗作业已成为行业趋势。目前常见的无人水下清洗作业多采用水下机器人配置刷盘进行水下清洗作业。但由于作业环境的不同,作业面曲度和附着物的厚度都成了影响水下清洗作业效率的关键因素,为了提高水下清洗设备的环境自适应能力,提出了一种高适应性,角度和高度可调的新型刷盘结构。
技术实现要素:
4.本实用新型提供了一种用于水下清洗的可调刷盘结构及水下机器人,刷盘结构可快速安装拆卸于水下机器人上,在水下机器人带动下,清理船底附着的生物,解决了上述背景技术提到的问题。
5.为实现上述目的,本实用新型的技术方案为:
6.一种用于水下清洗的可调刷盘结构,包括固定架,其特征在于:所述固定架下方设置有第一安装板,所述第一安装板下表面设置有用于连接第二安装板的若干球面螺栓,所述第一安装板与所述第二安装板之间设置有角度调整机构,所述第二安装板下方设置有若干导向杆,所述导向杆穿过第三安装板、滑套固定在底座上,所述第三安装板的内外两侧分别设置有驱动机构和刷盘。
7.进一步地,所述导向杆配套设置有调节螺杆,所述调节螺杆自上而下穿过第三安装板和滑套与所述导向杆平行,所述滑套的通孔与所述调节螺杆螺纹连接。
8.进一步地,所述导向杆外侧设置有减震弹簧,所述导向杆外围设置有减震弹簧。
9.进一步地,所述角度调整机构为楔块。
10.一种具有刷盘结构的水下机器人,包括机器人本体和刷盘结构,所述的刷盘结构为上述用于水下清洗的可调刷盘结构,所述刷盘结构设置于所述机器人本体上。
11.本实用新型所达到的有益效果为:
12.1、本实用新型中刷盘的高度和角度都可以进行调节,适应多种船舶的船底,能够清理船底各个位置附着的生物,清洁干净,清理效率高,而且不同的高度与角度的设置,可
以提升水下机器人抵抗洋流的能力,进而降低水下机器人的能量消耗。
13.2、本实用新型可以代替清理人员在船底进行清理工作,清理人员不需亲自涉水,为清理人员提供了安全的工作环境。
附图说明
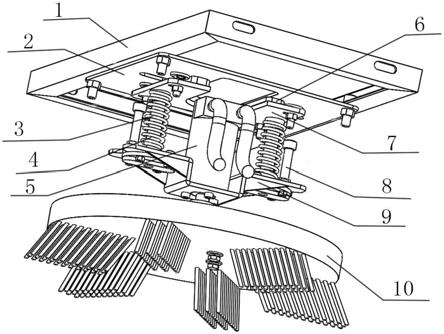
14.图1是刷盘结构整体结构示意图;
15.图2是刷盘结构下部细节图;
16.图3是刷盘结构上部细节图。
17.图中标记说明:1、固定架;2、第一安装板;3、减震弹簧;4、导向杆;5、驱动机构;6、楔块;7、第二安装板;8、调节螺杆;9、第三安装板;10、刷盘;11、球面螺栓;12、滑套;13、底座。
具体实施方式
18.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种用于水下清洗的可调刷盘结构及水下机器人做进一步详细的描述。
19.如图1所示,用于水下清洗的可调刷盘结构包括固定架1、楔块6、驱动机构5、导向杆4、减震弹簧3和刷盘10。固定架1设置在刷盘结构的最上端,用于连接固定各式水下机器人。固定架1下端设置有第一安装板2,第一安装板2四周开设有螺孔,第一安装板2和固定架1通过螺纹螺孔连接。第一安装板2下表面开设有四个开孔,球面螺栓11的头部设置在第一安装板2下面的开孔中,球面螺栓11的螺杆可以任意摆动与第一安装板2形成不同倾斜度数的夹角。第一安装板2下方设置有u型的第二安装板7,第二安装板7上开设有与球面螺栓11对应的开孔,球面螺栓11的螺杆穿过第二安装板7开孔与螺母配合将第二安装板7固定在第一安装板2的下方。第一安装板2与第二安装板7之间留有一定的空隙,空隙中可以设置不同角度的楔块6,不同角度的楔块6可以控制球面螺栓11的旋转角度,进而控制第二安装板7的角度。第二安装板7下方固定连接两根导向杆4,导向杆4为左右对称分布,导向杆4的另一端自上而下穿过第三安装板9、滑套12固定在底座13上。每个导向杆4外部设置有减震弹簧3,减震弹簧3的下端设置在第三安装板9的上表面上,滑套12上开设有两个通孔,导向杆4穿过第三安装板9和滑套12的内侧通孔,调节螺杆8穿过第三安装板9和滑套12的外侧通孔,调节螺杆8与滑套12的通孔为螺纹连接,旋拧调节螺杆8可以控制减震弹簧3的压缩程度和导向杆4的高度。第三安装板9的中部凹陷设置有马达安装板,驱动机构5设置在马达安装板的上表面上,马达安装板的下表面设置有刷盘10,刷盘10的旋转速度和力度受驱动机构5的控制。其中上述的驱动机构5可以是液压马达,电机,高压水泵,空化泵等。
20.刷盘结构可以通过顶部的固定架1连接各式水下机器人,通过水下机器人与刷盘机构的配合完成对船底的清理工作。
21.工作时,操作人员将刷盘结构通过固定架1固定在水下机器人上,然后根据船底的倾斜角度和海底的洋流方向调节刷盘10的倾斜角度,调节角度时,需要将所需角度的楔块6安置在第一安装板2和第二安装板7之间,球面螺栓11会根据楔块6的角度自行调整倾斜的角度,进而控制刷盘10的倾斜角度。在某些特定情况下,需要对刷盘10的高度进行调节,此时,操作人员可以旋拧调节螺杆8,调节螺杆8的下端接触固定导向杆4的底座13,从而是第
三安装板9上升,压缩减震弹簧3,使导向杆4的长度变小,进而使刷盘10的高度变小;反向旋拧调节螺杆8,使第三安装板9与底座13间的螺杆高度降低,进而使刷盘10的高度增高。
22.可以理解,本实用新型是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本实用新型的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本实用新型的精神和范围。因此,本实用新型不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本实用新型所保护的范围内。
技术特征:
1.一种用于水下清洗的可调刷盘结构,包括固定架(1),其特征在于:所述固定架(1)下方设置有第一安装板(2),所述第一安装板(2)下表面设置有用于连接第二安装板(7)的若干球面螺栓(11),所述第一安装板(2)与所述第二安装板(7)之间设置有角度调整机构,所述第二安装板(7)下方设置有若干导向杆(4),所述导向杆(4)穿过第三安装板(9)、滑套(12)固定在底座(13)上,所述第三安装板(9)的内外两侧分别设置有驱动机构(5)和刷盘(10)。2.根据权利要求1所述的一种用于水下清洗的可调刷盘结构,其特征在于:所述导向杆(4)配套设置有调节螺杆(8),所述调节螺杆(8)自上而下穿过第三安装板(9)和滑套(12)与所述导向杆(4)平行,所述滑套(12)的通孔与所述调节螺杆(8)螺纹连接。3.根据权利要求2所述的一种用于水下清洗的可调刷盘结构,其特征在于:所述导向杆(4)外围设置有减震弹簧(3)。4.根据权利要求3所述的一种用于水下清洗的可调刷盘结构,其特征在于:所述角度调整机构为楔块(6)。5.一种水下机器人,其特征在于:包括机器人本体和权利要求1-4任一项所述的用于水下清洗的可调刷盘结构,所述用于水下清洗的可调刷盘结构设置于所述机器人本体上。
技术总结
本实用新型涉及清洁设备技术领域,具体涉及一种用于水下清洗的可调刷盘结构及水下机器人,包括固定架,其特征在于:所述固定架下方设置有第一安装板,所述第一安装板下表面设置有用于连接第二安装板的若干球面螺栓,所述第一安装板与所述第二安装板之间设置有角度调整机构,所述第二安装板下方设置有若干导向杆,所述导向杆穿过第三安装板、滑套固定在底座上,所述第三安装板的内外两侧分别设置有驱动机构和刷盘。本实用新型中刷盘的高度和角度都可以进行调节,适应多种船舶的船底,能够清理船底各个位置附着的生物,清洁干净,清理效率高。率高。率高。
技术研发人员:陈晓博 刘羽菁 车明 张运朋 郑华朋
受保护的技术使用者:飞马滨(青岛)智能科技有限公司
技术研发日:2021.09.18
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
