1.本实用新型涉及医疗设备技术领域,特别涉及一种上肢康复训练机器人。
背景技术:
2.目前,临床上借助康复训练机器人,能使患者神经系统损伤后的康复治疗更加有效和系统。传统的疗法需要患者付出巨大的努力和长期的时间,由于尺寸和成本的原因,大多数已开发出的机器人系统主要部署在康复中心和医院,患者只能时常奔走于医疗机构和自己家之间,对于远距离的患者并不友好。由于每次训练时间有限,路途的奔波造成身心疲惫也会使得训练效果大打折扣。康复训练设备大小和成本限制,使居住偏远的患者无法有足够的时间和频次去进行康复训练,导致患者恢复速度慢。
技术实现要素:
3.本实用新型提供了一种上肢康复训练机器人,可以有效解决上述问题。
4.本实用新型是这样实现的:
5.一种上肢康复训练机器人,包括:移动装置;测力装置,包括:固定在所述移动装置上的基板、设置在所述基板上的测力机构、以及垂直设置在所述测力机构上的测力杆;康复协调机构,包括上肢放置件以及握把,其中,所述上肢放置件或者所述握把设置于所述测力杆上,从而将所述上肢放置件或者所述握把的力通过所述测力杆传导到所述测力机构上。
6.作为进一步改进的,所述康复协调机构进一步包括第五连接件以及与所述第五连接件阻尼连接的环状第六连接件;所述握把和所述上肢放置件分别固设于所述第五连接件的两端;所述环状第六连接件设置在所述上肢放置件的下方;所述上肢放置件通过所述环状第六连接件可拆卸的套接在所述测力杆上,从而将所述上肢放置件的力通过连接件间接传导到所述测力杆上。
7.作为进一步改进的,所述第六连接件包括:第二套筒、设置于所述第二套筒内部的第一轴承、中心对称设置于所述第二套筒两侧的阻尼转轴,所述第一轴承套接在所述测力杆上方。
8.作为进一步改进的,所述机器人进一步包括一卸力机构,所述卸力机构固设在所述基板上;所述康复协调机构进一步包括套置于所述卸力机构上且与所述卸力机构旋转连接的第七连接件,所述上肢放置件设置在所述第七连接件远离所述卸力机构的一端,所述握把可拆卸的安装在所述测力杆上。
9.作为进一步改进的,所述第七连接件上远离所述上肢放置件的一端的内部设置一第三套筒,所述第三套筒中设置一第二轴承,所述第二轴承套接在所述卸力机构上方。
10.作为进一步改进的,所述卸力机构包括第一套筒以及连接设置在所述第一套筒的一端的若干固定脚,所述固定脚沿着所述第一套筒的圆周均布,所述测力杆穿设于所述第一套筒中。
11.作为进一步改进的,所述测力杆从上往下依次包括传导部、测力部,所述传导部与
所述测力部之间形成第一台阶面。
12.作为进一步改进的,所述环状第六连接件套接在所述传导部并设置在所述第一台阶面上,从而将所述上肢放置件的力通过连接件间接传导到所述测力杆上。
13.作为进一步改进的,所述握把可拆卸的安装在所述第一台阶面上,从而将所述握把的力直接传导到所述测力杆上。
14.本实用新型的有益效果是:
15.本实用新型提供的一种上肢康复训练机器人,提供了一种设置在移动装置上的测力装置,包括测力机构以及垂直设置在测力机构上的测力杆,通过测力杆的力传导至测力机构进行测力。对于这种测力方式,可以在所述测力装置上设置不同的力的产生方式,即力由所述上肢放置件产生或者力由所述握把产生,对应两种不同结构的康复协调机构。也就是说所述机器人的测力部分通用性较高,适用于不同结构的康复协调机构,对于上肢不同部位的康复训练,只需要对应更换康复协调机构即可,方便切换成不同的康复训练模式。并且所述上肢康复训练机器人尺寸较小,不占空间,比较适用于家用。对于住所与医疗机构较远的患者,可以极大的方便患者随时随地的进行康复训练,加快患者恢复的进度。
16.当所述康复协调机构是由所述上肢放置件产生力时,力的来源比较单一,来源于前臂,对应是臂部康复协调机构,臂部放置在所述上肢放置件上,当臂部运动时,会对所述测力杆产生水平方向的分力,由所述测力杆带动所述测力机构测水平方向的分力,研究臂部的恢复情况。
17.当所述康复协调机构是由所述握把产生力时,对应是腕部康复协调机构,手掌握住所述握把运动时,检测手腕部的发力情况,此时设置了一个卸力机构,卸去手臂部对所述测力杆的力,以使所述测力杆仅仅受到由手腕部产生的力,不会受到臂部力的影响,测力的独立性较好。由所述测力杆带动所述测力机构测水平方向的分力,研究腕部的恢复情况。
附图说明
18.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
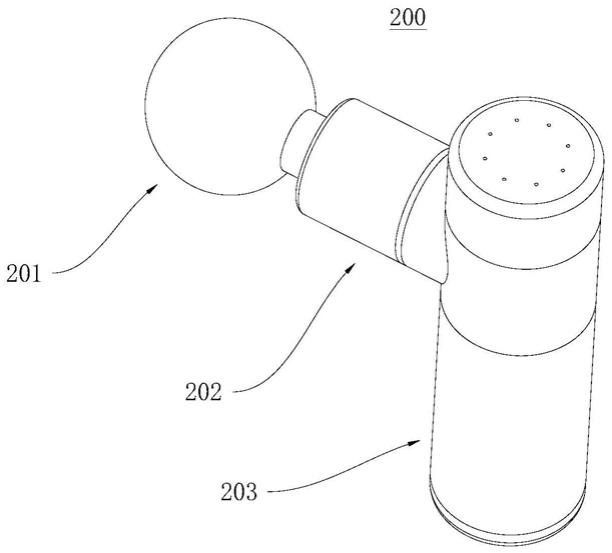
19.图1是本实用新型实施例提供的上肢康复训练机器人的基于臂部康复协调机构的结构示意图。
20.图2是本实用新型实施例提供的上肢康复训练机器人的基于臂部康复协调机构的爆炸图。
21.图3是本实用新型实施例提供的上肢康复训练机器人的基于臂部康复协调机构的局部剖视图。
22.图4是本实用新型实施例提供的上肢康复训练机器人的基于腕部康复协调机构的爆炸图。
23.图5是本实用新型实施例提供的上肢康复训练机器人的基于腕部康复协调机构的局部剖视图。
24.图6是本实用新型实施例提供的测力机构的爆炸图。
25.图7是本实用新型实施例提供的测力机构的结构示意图。
26.附图中各标记对应的部件名称是:
27.21-康复协调机构,211-上肢放置件,214-握把,216-第五连接件,2161-转轴座,217-第六连接件,2171-第二套筒,2172-阻尼转轴,2173-第一轴承,218-第七连接件,2181-第三套筒,2182-第二轴承,22-测力装置,220-测力杆,2201-传导部,2202-测力部,2203-第一台阶面,2204-凸起,221-基板,222-测力机构,2221-第一滑轨,2222-第一移动板,22221-第一通孔,2223-第二滑轨,2224-第二移动板,22241-凹槽,22242-销钉孔,22243-第二通孔,223-第一应变传感器,224-第二应变传感器,225-第三连接件,226-第四连接件,23-移动装置,25-卸力机构,251-第一套筒,252-固定脚。
具体实施方式
28.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
29.在本实用新型的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
30.参照图2、图6所示,一种上肢康复训练机器人,包括:移动装置23,所述移动装置23包括所述机器人的壳体、底座以及设置在所述底座上的控制模块、设置在所述底座上的4只麦克纳姆轮,每个麦克纳姆轮具有单独的电机,实现了移动装置23在水平面上的全方位移动;测力装置22,包括:固定在所述移动装置23上的基板221、设置在所述基板221上的测力机构222、以及垂直设置在所述测力机构222上的测力杆220;所述测力机构222、所述移动装置23均与所述控制模块电连接。
31.参照图1、图2、图4所示,所述机器人还包括康复协调机构21,包括上肢放置件211以及握把214,其中,所述上肢放置件211或者所述握把214设置于所述测力杆220上,从而将所述上肢放置件211或者所述握把214的力通过所述测力杆220传导到所述测力机构222上。所述测力机构222包括若干应变式测力传感器。
32.具体的,参照图1-3所示,当所述康复协调机构21是臂部康复协调机构时,所述上肢放置件211设置于所述测力杆220上,从而将所述上肢放置件211的力通过所述测力杆220传导到所述测力机构222上;参照图4-5所示,当所述康复协调机构21是腕部康复协调机构时,所述握把214设置于所述测力杆220上,从而将所述握把214的力通过所述测力杆220传导到所述测力机构222上。
33.参照图6所示,所述测力杆220从上往下依次包括传导部2201、测力部2202,所述传
导部2201与所述测力部2202之间形成第一台阶面2203,所述测力部2202的下方设置一凸起2204。所述上肢放置件211或者所述握把214设置于所述测力杆220上是指套接在所述传导部2201之后放置或者承接在所述第一台阶面2203上。当所述康复协调机构21随着上肢运动时,所述上肢放置件211或者所述握把214的力从所述传导部2201传导至所述测力部2202,由所述测力部2202带动所述测力机构222发生微小位移,由于所述测力机构22里面设置有应变式测力传感器,所以可以测得所述康复协调机构23产生的水平方向上的合力的方向和大小,发送给所述控制模块,进而由所述控制模块控制所述移动机构23的移动方向和速度,反过来带动上肢运动进行康复训练。
34.实施例一
35.臂部康复协调机构,研究前臂产生的力
36.参照图1-2所示,所述康复协调机构21进一步包括第五连接件216以及与所述第五连接件216阻尼连接的环状第六连接件217;所述握把214和所述上肢放置件211分别固设于所述第五连接件216的两端;所述环状第六连接件217设置在所述上肢放置件211的下方;所述上肢放置件211通过所述环状第六连接件217可拆卸的套接在所述测力杆220上,从而将所述上肢放置件211的力通过连接件间接传导到所述测力杆220上。
37.进一步的,参照图1、图3所示,所述第六连接件217包括:第二套筒2171、设置于所述第二套筒2171内部的第一轴承2173、中心对称设置于所述第二套筒2171两侧的阻尼转轴2172,所述第一轴承2173套接在所述测力杆220上方,具体的,所述第一轴承2173套接在所述传导部2201上后放置或者承接于所述第一台阶面2203上,从而将所述上肢放置件211的力通过连接件间接传导到所述测力杆220上。所述第五连接件216上靠近所述第六连接件217的一端设置有与所述阻尼转轴2172配合的转轴座2161,所述转轴座2161与所述第五连接件216一体设置。当手臂放置在所述上肢放置件211上时,可以使得所述上肢放置件211在水平方向上和竖直方向上均有转动。使得手臂在康复训练的过程中,不仅随着所述移动机构23运动,相对于所述移动机构23也会适应性微小的运动,增加使用过程中的舒适感。
38.当所述康复协调机构21是臂部康复协调机构时,此时只有前臂的力作用于所述上肢放置件211上,也就是说只有前臂的力通过所述测力杆220作用于所述测力机构222上。当臂部运动时,会对所述测力机构222产生水平方向上的力和竖直方向上的力,此时所述测力机构222只感应水平方向上的合力的方向和大小,发送给所述控制模块,进而由所述控制模块控制所述移动机构23的移动方向和速度。首先由使用者的臂部运动产生与使用者臂部康复情况对应的应力数据发送给所述控制模块,进而所述控制模块根据这一应力数据做出合适的选择和调整,控制所述移动机构23运动从而反过来带动使用者的臂部运动,训练使用者的臂部恢复。
39.实施例二
40.腕部康复协调机构,研究手腕部产生的力
41.参照图4-5所示,所述机器人进一步包括一卸力机构25,所述卸力机构25固设在所述基板221上;所述康复协调机构21进一步包括套置于所述卸力机构25上且与所述卸力机构25旋转连接的第七连接件218,所述上肢放置件211设置在所述第七连接件218远离所述卸力机构25的一端,所述握把214可拆卸的安装在所述测力杆220上。所述第七连接件218上远离所述上肢放置件211的一端的内部设置一第三套筒2181,所述第三套筒2181中设置一
第二轴承2182,所述第二轴承2182套接在所述卸力机构25的上方。当所述康复协调机构21套接在所述测力杆220上时,手臂的力卸在了所述卸力机构25上。在手腕用力的时候,由于设置有第二轴承2182,手臂也可以适应性的带动所述上肢放置件211在水平面上的转动,这样会增加使用的舒适性,不会出现手腕运动而手臂不能动的不适感。
42.参照图6所示,所述卸力机构25包括第一套筒251以及连接设置在所述第一套筒251的一端的若干固定脚252,所述固定脚252沿着所述第一套筒251的圆周均布,所述测力杆220穿设于所述第一套筒251中。相邻两所述固定脚252之间形成第二台阶面253。参照图5所示,所述第二轴承2182套接在所述第一套筒251上后放置在所述第二台阶面253上。所述第一套筒251低于所述第一台阶面2203设置。然后将所述握把214可拆卸的安装在所述第一台阶面2203上,从而将所述握把214的力直接传导到所述测力杆220上。
43.当所述康复协调机构21是腕部康复协调机构时,此时所述测力机构222采集力的对象只是腕部产生的力,所以为了消除上肢中手臂产生力带来的影响,在测腕部产生力的时候需要卸掉臂部产生的力。所以就设置了所述卸力机构25。所述康复协调机构21通过所述第七连接件218上的所述第二轴承2182套接在所述卸力机构25上,然后所述握把214就套接在所述测力杆220上,小臂放置在所述上肢放置件211产生的力由所述卸力机构25完全卸至所述基板221上了,此时所述测力杆220上的力全部是所述握把214上的手腕产生的力。
44.当手腕部运动时,会通过所述测力杆220对所述测力机构222产生水平方向上的力和竖直方向上的力,此时所述测力机构222只感应到水平方向上的合力的方向和大小,发送给所述控制模块,进而由所述控制模块控制所述移动机构23的移动方向和速度。首先由使用者的手腕运动产生与使用者手腕部康复情况对应的应力数据发送给所述控制模块,进而所述控制模块根据这一应力数据做出合适的选择和调整,进而控制所述移动机构23运动从而反过来带动使用者的手腕运动,训练使用者的手腕部恢复。
45.所述一种康复训练机器人的测力部分通用性较高,适用于不同结构的康复协调机构,对于上肢不同部位的康复训练,只需要对应更换康复协调机构即可。并且所述上肢康复训练机器人尺寸较小,不占空间,比较适用于家用。可以极大的方便了患者随时随地的进行康复训练,加快患者恢复的进度。并且当所述康复协调机构是腕部康复协调机构时,通过一个卸力机构,卸去手臂部对所述测力杆的力,以使所述测力杆仅仅受到由手腕部产生的力,不会受到臂部力的影响,测力的独立性较好。
46.实施例三
47.下面对所述测力机构222进行下介绍。参照图6-7所示,所述测力机构222包括:
48.第一测力组件,包括:两个第一滑轨2221,平行且间隔设置在所述基板221上;第一移动板2222,设置在所述第一滑轨2221上远离所述基板221的一侧,并平行于所述基板221;第一应变传感器223,连接设置于所述第一移动板2222的一侧边处且固定在所述基板221上,与所述第一滑轨2221垂直,其用于检测所述第一移动板2222的位移量;
49.第二测力组件,包括:两个第二滑轨2223,平行且间隔设置在所述第一移动板2222上远离所述基板221的一侧,且与所述第一滑轨2221垂直;第二移动板2224,设置在所述第二滑轨2223上远离所述第一移动板2222的一侧,且平行于所述第一移动板2222;第二应变传感器224,连接设置于所述第二移动板2224的一侧边处且固定在所述基板221上,且与所述第二滑轨2223垂直,其用于检测所述第二移动板2224的位移量。
50.所述第一应变传感器223通过第三连接件225连接于所述第一移动板2222上,所述第二应变传感器224通过第四连接件226连接于所述第二移动板2224上。所述第一/第二应变传感器223/224上设置有通孔,使得应变传感器受到微小力也能产生形变,提升了应变传感器对微小受力的敏感度。通过康复协调机构21的水平运动,带动测力装置222在水平位置的位移,进而使得第一应变传感器223和第二应变传感器224产生形变,从而产生应力数据。根据第一应变传感器223的受力和第一应变传感器224的受力,合成合力大小和方向,进而发送至控制模块控制移动机构23的移动方向和速度。在本实施例中,所述第三连接件225与所述第一移动板2222一体设置,所述第四连接件226与所述第二移动板2224一体设置。
51.所述测力杆220的下端设置一凸起2204,所述凸起2204的外径小于测力部2202的外径;所述第二移动板2224上设置一与所述凸起2204配合的凹槽22241,所述测力杆220通过所述凸起2204与所述凹槽22241的配合抵接在所述第二移动板2224上。所述第二移动板2224上进一步设置一销钉孔22242,设置一销钉穿过所述销钉孔22242并与所述测力杆220销接固定。
52.所述第二移动板2224上进一步设置若干第二通孔22243,所述第一移动板2222上进一步设置一第一通孔22221,所述卸力机构25的固定脚252依次穿过所述第二通孔22243、所述第一通孔22221后固定在所述基板221上。
53.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。