自动化导引系统
1.本技术是申请日为2018年8月13日、发明名称为“自动化导引系统”的专利申请201810914293.2的分案申请。
技术领域
2.本公开总体上涉及自动化导引系统,并且更具体而言涉及根据计划路径操纵主车辆的自动化导引系统。
背景技术:
3.已知使用车道居中控制系统以沿道路操控主车辆。典型的车道居中控制系统使用相机来检测车道标记以确定道路的中线并根据中线操控主车辆。其它车道居中控制系统也可以使用相机来检测主车辆前方的另一车辆,并在未检测到车道标记时跟随另一车辆。在另一车辆从主车辆的期望行驶路线偏离时可能会出现问题。
技术实现要素:
4.根据一个实施例,提供了一种用于自动化车辆上的导引系统。该导引系统包括相机、车辆到车辆收发器和控制器。相机检测道路上的车道标记并检测在主车辆前方行驶的引导车辆。车辆到车辆收发器从所述引导车辆接收将来路径点,其中所述将来路径点限定所述引导车辆沿所述道路的将来路线。控制器与相机和车辆到车辆收发器通信。控制器基于车道标记为主车辆确定计划路径。控制器还基于相机确定引导车辆的引导路径。在未检测到车道标记并且引导路径对应于计划路径时,控制器根据引导路径操控主车辆。在未检测到车道标记并且将来路径点不对应于计划路径时,控制器根据计划路径操控主车辆。
5.在另一个实施例中,提供了一种操作用于自动化车辆上的导引系统的方法。该方法包括如下步骤:检测车道标记,接收将来路径点,确定计划路径,确定引导路径,以及操控主车辆。检测车道标记的步骤包括利用相机检测道路上的车道标记以及在主车辆前方行驶的引导车辆。接收将来路径点的步骤包括利用车辆到车辆收发器从引导车辆接收将来路径点,其中将来路径点限定引导车辆沿道路的将来路线。确定计划路径的步骤包括利用与相机和车辆到车辆收发器通信的控制器基于车道标记确定主车辆的计划路径。确定引导路径的步骤包括利用控制器基于相机确定引导车辆的引导路径。操控主车辆的步骤包括:在未检测到车道标记并且引导路径对应于计划路径时,利用控制器根据引导路径操控主车辆,以及在未检测到车道标记并且将来路径点不对应于计划路径时,根据计划路径操控主车辆。
6.又一个实施例中,提供了一种用于自动化车辆上的导引系统。该导引系统包括对象检测器、车辆到车辆收发器和控制器。对象检测器检测主车辆所行驶的道路上的车道标记和在所述主车辆前方行驶的引导车辆。车辆到车辆收发器从所述引导车辆接收将来路径点,其中所述将来路径点指示所述引导车辆的将来路线。控制器与对象检测器和车辆到车辆收发器通信。控制器基于车道标记为主车辆确定行驶路径,并在将来路径点与行驶路径
重合时跟随引导车辆。
7.在阅读以下优选实施例的具体实施方式时,将更清楚地显现其它特征和优点,所述优选实施例仅通过非限制性示例的方式并参照附图给出。
附图说明
8.现在将参照附图通过示例的方式描述本发明,在附图中:
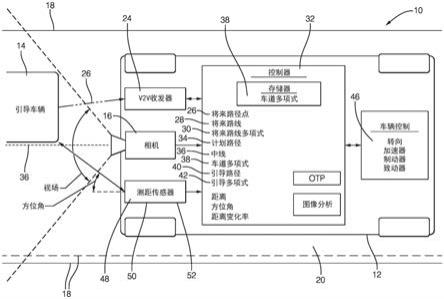
9.图1是根据一个实施例的导引系统的图示;
10.图2是根据一个实施例的装备有图1的导引系统的主车辆的图示;
11.图3是根据一个实施例的图2的主车辆的图示;
12.图4是根据另一实施例的操作图1的导引系统的方法的流程图;
13.图5是根据另一实施例的导引系统的图示;
14.图6是根据又一实施例的装备有图5的导引系统的主车辆的图示;以及
15.图7是根据又一实施例的图5的主车辆的图示。
具体实施方式
16.图1示出了用于自动化车辆12上的导引系统10的非限制性示例,导引系统10在下文被称为系统10,自动化车辆12在下文被称为主车辆12。如下文将更详细所述,系统10是相对于现有导引系统的改进,因为系统10基于车辆到车辆(v2v)通信来确定何时跟随引导车辆14。如本文所用,术语“自动化车辆”并非意在暗示要求主车辆12的全自动或自主操作。可以设想,本文给出的教导适用于如下实例:其中,主车辆12完全由人进行人工操作,并且自主化仅仅为人提供辅助并且有可能操作主车辆12的制动器和转向以防止主车辆12与其它车辆碰撞,或者为操作员提供辅助以进行车道保持。
17.系统10包括相机16,相机16检测道路20上的车道标记18并检测在主车辆12前方行驶的引导车辆14。如本领域的技术人员将认识到的,适合用于主车辆12上的相机16的示例是市场上可买到的,一个示例是来自美国爱达荷州博伊西的micron technology,inc.的aptina mt9v023。相机16可以安装在主车辆12前方,或者安装在主车辆12内部的适合于相机16通过主车辆12的挡风玻璃观察主车辆12周围的区域的位置。相机16优选为视频型相机16或能够以例如每秒十帧的充分高的帧速率拍摄道路20和周围区域的图像的相机16。道路20可以由车道标记18限定,或者如果未检测到车道标记18,可以由人行道的边缘限定。图像可以包括但不限于主车辆12所行驶的道路20左侧和右侧的车道标记18。图像还可以包括相邻车道22(参见图3)中的车道标记18。车道标记18可以包括实线、虚线或其任何组合。
18.系统10还包括从引导车辆14接收将来路径点26的车辆到车辆收发器24(v2v收发器24),其中将来路径点26限定了引导车辆14沿道路20的将来路线28。引导车辆14可以自主操作,并且可以根据将来路线28进行导航。v2v收发器24可以是专用短程通信(dsrc)装置,其在具有75mhz的带宽的5.9ghz频带中进行操作,并且典型范围为1000米。本领域的技术人员将认识到,其它特别设置的v2v网络可以存在并且包括在本文中。将来路径点26可以包括沿着限定引导车辆14的将来路线28的道路20的一系列gps坐标(例如,经度和纬度)。将来路径点26可以由基于将来路线28的将来路线多项式30表征。将来路线28可以指示引导车辆14将执行特定驾驶机动策略,包括但不限于车道变换、左转、右转等。将来路线28还可以包括
引导车辆14的目的地。
19.系统10还包括与相机16和v2v收发器24通信的控制器32。控制器32可以包括诸如微处理器的处理器(未示出)或其它控制电路,例如包括用于处理数据的专用集成电路(asic)的模拟和/或数字控制电路,这对于本领域技术人员来说应该是显而易见的。控制器32可以包括存储器(未具体示出),包括非易失性存储器,例如电可擦可编程只读存储器(eeprom),以用于存储一个或多个例程、阈值和捕获的数据。可以由处理器执行一个或多个例程以执行用于基于由控制器32从相机16和v2v收发器24接收的信号来确定主车辆12的计划路径34的步骤,如本文所述。
20.控制器32可以经由视频信号(未具体示出)从相机16接收图像,并可以基于车道标记18确定道路20的车道宽度(未具体示出)和中线36。亦即,相机16所检测或拍摄的图像可以由控制器32使用用于图像分析的已知技术来处理,以确定应当沿道路20的何处操作主车辆12。可以使用视觉处理技术,例如以色列耶路撒冷的moblieye vision technologies,ltd.的eye平台或其它适当的装置。例如而非限制,中线36优选在主车辆12所行驶的道路20的中间,并且计划路径34优选跟随中线36。计划路径34可以由基于车道标记18的车道多项式38表征,并可以存储在控制器32的存储器中。控制器32优选使用道路20左侧和右侧两者上的车道标记18来确定计划路径34,或者如果与车道标记18的一个实例相关联的置信度水平高到足以产生车道多项式38,可以仅使用一个车道标记18确定计划路径34,如本领域的技术人员所理解的那样。如果未检测到车道标记18,控制器32可以利用充分多的移交通知将主车辆12的控制移交给操作员(未示出),尽管这不是对在未检测到车道标记18的实例时的状况的优选响应。下文将详细地描述该优选响应。
21.图2示出了一种交通情形,其中主车辆12正在道路20上跟随引导车辆14,其中未检测到道路20左侧上的车道标记18的一段(即,缺失、阻隔、褪色等)。在图2所示的非限制性示例中,引导车辆14正在自主操作,并在发送将来路径点26的同时根据将来路线28进行导航。如上所述,控制器32基于检测到的车道标记18为主车辆12确定计划路径34,并基于相机16确定引导车辆14的引导路径40。可以使用对象轨迹处理(otp)的已知方法确定引导路径40,其中主要对象(即,引导车辆14)被相机16检测并被图像分析软件处理以确定主要对象的轨迹。引导路径40可以由基于引导车辆14的引导多项式42表征。在未检测到车道标记18时,如图2所示,控制器32可以使用引导路径40确定主车辆12的计划路径34。控制器32可以优选使用例如在图2所示的道路20的右侧上检测到的车道标记18、以及引导路径40,来确定计划路径34。如果未检测到车道标记18,控制器32还可以暂时使用存储器中存储的车道多项式38、以及引导路径40来确定计划路径34。在未检测到车道标记18并且引导路径40对应于计划路径34时,控制器32根据引导路径40操控46主车辆12。亦即,在未检测到车道标记18时优选地向操作员交接主车辆12的控制的动作是使控制器32为引导路径40赋予比计划路径34更高的优先级,并控制主车辆12跟随引导车辆14,条件是引导路径40对应于主车辆12的计划路径34。
22.图3示出了另一种交通情形,其中引导车辆14正在向左转车道44移动,其中车道标记18暂时中断并且未被相机16检测到。在图3所示的非限制性示例中,引导车辆14正在自主操作,并在发送将来路径点26的同时根据将来路线28进行导航。已经发现,一些自动化车辆系统会不期望地跟随引导车辆14进入相邻车道22。在未检测到车道标记18并且将来路径点
26不对应于计划路径34时,控制器32根据计划路径34操控46主车辆12。亦即,当将来路径点26指示从计划路径34偏离时,如同图3所示的当引导车辆14正在移动进入左转车道44时,控制器32为计划路径34赋予更高优先级,并忽略引导路径40。换言之,在引导车辆14的v2v传输广播指示引导车辆14将要跟随不同车道时,主车辆12不跟随引导车辆14。这是有益的,因为在能够由相机16重新建立对车道标记18的检测之前,系统10防止了主车辆12暂时跟随引导车辆14进入左转车道44。
23.尽管图3示出将来路径点26包括行驶到左转车道44中,但应当理解,在引导车辆14指示行驶到右转车道(未示出)中时,系统10起作用。
24.系统10还可以包括与控制器32通信的测距传感器48,其可以检测主车辆12前方的道路20上的引导车辆14。控制器32还可以基于测距传感器48确定引导路径40。如本领域技术人员所知,测距传感器48可以包括雷达50和/或激光雷达52。适合于检测引导车辆14的雷达50的示例是可从美国密歇根州特洛伊的delphi inc.获得的电子扫描雷达(esr)或后侧检测系统(rsds)或近程雷达(srr)。
25.图4示出了操作用于自动化车辆12上的导引系统10的方法200的非限制性示例,导引系统10在下文被称为系统10,自动化车辆12在下文被称为主车辆12。
26.步骤202,检测车道标记,可以包括利用相机16检测道路20上的车道标记18并检测在主车辆12前方行驶的引导车辆14。如本领域的技术人员将认识到的,适合用于主车辆12上的相机16的示例是市场上可买到的,一个示例是来自美国爱达荷州博伊西的micron technology,inc.的aptina mt9v023。相机16可以安装在主车辆12前方,或者安装在主车辆12内部的适合于相机16通过主车辆12的挡风玻璃观察主车辆12周围的区域的位置。相机16优选为视频型相机16或能够以例如每秒十帧的充分高的帧速率拍摄道路20和周围区域的图像的相机16。道路20可以由车道标记18限定,或者如果未检测到车道标记18,可以由人行道的边缘限定。图像可以包括但不限于主车辆12所行驶的道路20的左侧和右侧上的车道标记18。图像还可以包括相邻车道22(参见图3)中的车道标记18。车道标记18可以包括实线、虚线或其任何组合。
27.步骤204,接收将来路径点,可以包括利用车辆到车辆收发器24(v2v收发器24)从引导车辆14接收将来路径点26,其中将来路径点26限定引导车辆14沿道路20的将来路线28。引导车辆14可以自主操作,并可以根据将来路线28进行导航。v2v收发器24可以是专用短程通信(dsrc)装置,其在具有75mhz的带宽的5.9ghz频带中进行操作,并且典型范围为1000米。本领域的技术人员将认识到,其它特别设置的v2v网络可以存在并且包括在本文中。将来路径点26可以包括沿着限定引导车辆14的将来路线28的道路20的一系列gps坐标(例如,经度和纬度)。将来路径点26可以由基于将来路线28的将来路线多项式30表征。将来路线28可以指示引导车辆14将执行特定驾驶机动策略,包括但不限于车道变换、左转、右转等。将来路线28还可以包括引导车辆14的目的地。
28.步骤206,确定计划路径,可以包括利用与相机16和v2v收发器24通信的控制器32基于车道标记18为主车辆12确定计划路径34。控制器32可以包括诸如微处理器的处理器(未示出)或其它控制电路,例如包括用于处理数据的专用集成电路(asic)的模拟和/或数字控制电路,这对于本领域技术人员来说应该是显而易见的。控制器32可以包括存储器(未具体示出),包括非易失性存储器,例如电可擦可编程只读存储器(eeprom),以用于存储一
个或多个例程、阈值和捕获的数据。可以由处理器执行一个或多个例程以执行用于基于由控制器32从相机16和v2v收发器24接收的信号来确定主车辆12的计划路径34的步骤,如本文所述。
29.控制器32可以经由视频信号(未具体示出)从相机16接收图像,并可以基于车道标记18确定道路20的车道宽度(未具体示出)和中线36。亦即,相机16所检测或拍摄的图像可以由控制器32使用用于图像分析的已知技术来处理,以确定应当沿道路20的何处操作主车辆12。可以使用视觉处理技术,例如以色列耶路撒冷的moblieye vision technologies,ltd.的eye平台或其它适当的装置。例如而非限制,中线36优选在主车辆12所行驶的道路20的中间,并且计划路径34优选跟随中线36。计划路径34可以由基于车道标记18的车道多项式38表征,并可以存储在控制器32的存储器中。控制器32优选使用道路20左侧和右侧两者上的车道标记18来确定计划路径34,或者如果与车道标记18的一个实例相关联的置信度水平高到足以产生车道多项式38,可以仅使用一个车道标记18确定计划路径34,如本领域的技术人员所理解的那样。如果未检测到车道标记18,控制器32可以利用充分多的移交通知将主车辆12的控制移交给操作员(未示出),尽管这不是对在未检测到车道标记18的实例时的状况的优选响应。
30.下文将详细地描述该优选响应
31.步骤208,确定引导路径,可以包括利用控制器32基于相机16确定引导车辆14的引导路径40。图2示出了一种交通情形,其中主车辆12正在道路20上跟随引导车辆14,其中未检测到(即,缺失、阻隔、褪色等)道路20左侧上的车道标记18的一段。在图2所示的非限制性示例中,引导车辆14正在自主操作,并在发送将来路径点26的同时根据将来路线28进行导航。如上所述,控制器32基于检测到的车道标记18为主车辆12确定计划路径34,并基于相机16确定引导车辆14的引导路径40。可以使用对象轨迹处理(otp)的已知方法确定引导路径40,其中主要对象(即,引导车辆14)被相机16检测并被图像分析软件处理以确定主要对象的轨迹。引导路径40可以由基于引导车辆14的引导多项式42表征。在未检测到车道标记18时,如图2所示,控制器32可以使用引导路径40确定主车辆12的计划路径34。控制器32可以优选使用例如在图2所示的道路20的右侧上检测到的车道标记18、以及引导路径40,来确定计划路径34。如果未检测到车道标记18,控制器32还可以暂时使用存储器中存储的车道多项式38、以及引导路径40来确定计划路径34。
32.步骤210,操控主车辆,可以包括在未检测到车道标记18并且引导路径40对应于计划路径34时,利用控制器32根据引导路径40操控46主车辆12。亦即,在未检测到车道标记18时优选向操作员交接对主车辆12的控制的动作是控制器32为引导路径40赋予比计划路径34更高的优先级,并控制主车辆12跟随引导车辆14,条件是引导路径40对应于主车辆12的计划路径34。
33.图3示出了另一种交通情形,其中引导车辆14正在移动到左转车道44中,其中车道标记18暂时中断且未被相机16检测到。在图3所示的非限制性示例中,引导车辆14正在自主操作,并在发送将来路径点26的同时根据将来路线28进行导航。已经观察到,一些自动化车辆系统会不期望地跟随引导车辆14进入相邻车道22。在未检测到车道标记18并且将来路径点26不对应于计划路径34时,控制器32根据计划路径34操控46主车辆12。亦即,在将来路径点26指示从计划路径34偏离时,如同图3所示在引导车辆14正在移动到左转车道44中时那
样,控制器32为计划路径34赋予更高优先级,并忽略引导路径40。换言之,在引导车辆14的v2v传输广播指示引导车辆14正要跟随不同车道时,主车辆12不跟随引导车辆14。这是有益的,因为在相机16能够重新建立对车道标记18的检测之前,系统10防止主车辆12暂时跟随引导车辆14进入左转车道44。
34.尽管图3示出将来路径点26包括行驶到左转车道44中,但应当理解,在引导车辆14指示行驶到右转车道(未示出)时,系统10起作用。
35.图5示出了用于自动化车辆112上的导引系统110的非限制性示例,导引系统110在下文被称为系统110,自动化车辆112在下文被称为主车辆112。如下文将更详细描述的,系统110是相对于现有导引系统的改进,因为系统110基于车辆到车辆(v2v)通信确定何时跟随引导车辆114。如本文所用,术语“自动化车辆”并非意在暗示要求主车辆112的全自动或自主操作。可以设想,本文给出的教导适用于如下实例:其中,主车辆112完全由人进行人工操作,并且自主化仅仅为人提供辅助并且有可能操作主车辆112的制动器和转向以防止主车辆112与其它车辆碰撞,或者为操作员提供辅助以进行车道保持。
36.系统110包括对象检测器115,其检测主车辆112所行驶的道路120上的车道标记118和在主车辆112前方行驶的引导车辆114。在图5所示的非限制性示例中,对象检测器115是相机116。如本领域的技术人员将认识到的,适合用于主车辆112上的相机116的示例是市场上可买到的,一个示例是来自美国爱达荷州博伊西的micron technology,inc.的aptina mt9v023。相机116可以安装在主车辆112前方,或者安装在主车辆112内部的适合于相机116通过主车辆112的挡风玻璃观察主车辆112周围的区域的位置。相机116优选为视频型相机116或能够以例如每秒十帧的充分高的帧速率拍摄道路120和周围区域的图像的相机116。道路120可以由车道标记118限定,或者如果未检测到车道标记118,可以由人行道的边缘限定。图像可以包括但不限于主车辆112所行驶的道路120的左侧和右侧的车道标记118。图像还可以包括相邻车道122(参见图3)中的车道标记118。车道标记118可以包括实线、虚线或其任何组合。
37.系统110还包括从引导车辆114接收将来路径点126的车辆到车辆收发器124(v2v收发器124),其中将来路径点126限定了引导车辆114沿道路120的将来路线128。引导车辆114可以自主操作,并且可以根据将来路线128进行导航。v2v收发器124可以是专用短程通信(dsrc)装置,其在具有75mhz的带宽的5.9ghz频带中进行操作,并且典型范围为1000米。本领域的技术人员将认识到,其它特别设置的v2v网络可以存在并且包括在本文中。将来路径点126可以包括沿着限定引导车辆114的将来路线128的道路120的一系列gps坐标(例如,经度和纬度)。将来路径点126可以由基于将来路线128的将来路线多项式130表征。将来路线128可以指示引导车辆114将执行特定驾驶机动策略,包括但不限于车道变换、左转、右转等。将来路线128还可以包括引导车辆114的目的地。
38.系统110还包括与对象检测器115(即,相机116)和v2v收发器124通信的控制器132。控制器132可以包括诸如微处理器的处理器(未示出)或其它控制电路,例如包括用于处理数据的专用集成电路(asic)的模拟和/或数字控制电路,这对于本领域技术人员来说应该是显而易见的。控制器132可以包括存储器(未具体示出),包括非易失性存储器,例如电可擦可编程只读存储器(eeprom),以用于存储一个或多个例程、阈值和捕获的数据。可以由处理器执行一个或多个例程以执行用于基于由控制器132从对象检测器115和v2v收发器
124接收的信号来确定主车辆112的行驶路径134的步骤,如本文所述。
39.控制器132可以经由视频信号(未具体示出)从相机116(即,对象检测器115)接收图像,并可以基于车道标记118确定道路120的车道宽度(未具体示出)和中线136。亦即,相机116所检测或拍摄的图像可以由控制器132使用用于图像分析的已知技术来处理,以确定应当沿道路120的何处操作主车辆112。可以使用视觉处理技术,例如以色列耶路撒冷的moblieye vision technologies,ltd.的eye平台或其它适当的装置。例如而非限制,中线136优选在主车辆112所行驶的道路120的中间,并且行驶路径134优选跟随中线136。行驶路径134可以由基于车道标记118的车道多项式138表征,并可以存储在控制器132的存储器中。控制器132优选使用道路120的左侧和右侧两者上的车道标记118来确定行驶路径134,或者如果与车道标记118的一个实例相关联的置信度水平高到足以产生车道多项式138,可以仅使用一个车道标记118确定行驶路径134,如本领域的技术人员所理解的那样。如果未检测到车道标记118,控制器132可以利用充分多的移交通知将对主车辆112的控制移交给操作员(未示出),尽管这不是对在未检测到车道标记118的实例时的状况的优选响应。下文将详细地描述该优选响应。
40.图6示出了一种交通情形,其中主车辆112正在道路120上跟随引导车辆114,其中未检测到(即,缺失、阻隔、褪色等)道路120的左侧上的车道标记118的一段。在图6所示的非限制性示例中,引导车辆114正在自主操作,并在发送将来路径点126的同时根据将来路线128进行导航。控制器132如上所述根据检测到的车道标记118为主车辆112确定行驶路径134,并基于相机116确定引导车辆114的引导路径140。可以使用对象轨迹处理(otp)的已知方法确定引导路径140,其中主要对象(即,引导车辆114)被相机116检测并被图像分析软件处理以确定主要对象的轨迹。引导路径140可以基于引导车辆114由引导多项式142表征。在未检测到车道标记118时,如图6所示,控制器132可以使用引导路径140确定主车辆112的行驶路径134。控制器132可以优选使用例如在图6所示的道路120的右侧上检测到的车道标记118、以及引导路径140,来确定行驶路径134。如果未检测到车道标记118,控制器132还可以暂时使用存储器中存储的车道多项式138、以及引导路径140,以确定行驶路径134。在未检测到车道标记118并且引导路径140与行驶路径134重合时,控制器132根据引导路径140操控146主车辆112。亦即,在未检测到车道标记118时优选向操作员交接对主车辆112的控制的动作是控制器132为引导路径140赋予比行驶路径134更高的优先级,并控制主车辆112跟随引导车辆114,条件是引导路径140与主车辆112的行驶路径134重合。
41.图7示出了另一种交通情形,其中引导车辆114正在移动到左转车道144中,其中车道标记118暂时中断且未被相机116检测到。在图7所示的非限制性示例中,引导车辆114正在自主操作,并在发送将来路径点126的同时根据将来路线128进行导航。已经观察到,一些自动化车辆系统会不期望地跟随引导车辆114进入相邻车道122。在未检测到车道标记118并且将来路径点126不对应于行驶路径134时,控制器132根据行驶路径134操控146主车辆112。亦即,在将来路径点126指示从行驶路径134偏离时,如同图7所示在引导车辆114正在移动到左转车道144中时那样,控制器132为行驶路径134赋予更高优先级,并忽略引导路径140。换言之,在引导车辆114的v2v传输广播指示引导车辆114正要跟随不同车道时,主车辆112不跟随引导车辆114。这是有益的,因为在相机116能够重新建立对车道标记118的检测之前,系统110防止主车辆112暂时跟随引导车辆114进入左转车道144。
42.尽管图7示出将来路径点126包括行驶到左转车道144中,但应当理解,在引导车辆114指示行驶到右转车道(未示出)中时,系统110起作用。
43.因此,提供了一种导引系统10、一种用于导引系统10的控制器32以及一种操作导引系统10的方法。导引系统10是对其它导引系统的改进,因为在相机16能够重新建立对车道标记18的检测之前,系统10防止主车辆12暂时跟随引导车辆14进入左转车道44。
44.尽管已经结合本发明的优选实施例描述了本发明,但并非旨在被如此限制,而是仅限制于在后续权利要求中阐述的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。