1.本发明涉及一种应用于空间环境,深空探测,星际天体相互作用的推演,岩土力学,沙尘暴动态分析等研究领域的结构模型的构建方法。
背景技术:
2.空间结构有效性能的确定是一个经典的固体力学问题。均匀化模型利用组分相的性质、几何形状和空间分布的相关信息来估计或约束空间结构的性能。其中包括自洽方案,mori-tanaka (mt)模型等,本发明给出的是一般自洽格式。虽然这些模型的预测能力或许被许多人数值实现。然而,就发明人的认知,还没有研究集中于进行一个系统的和彻底的评价现有的同质化的模型。因此,均匀化模型提供给定精度预测的微结构范围没有严格定义。综合性能评估需要建立一个“准确”有效性能的重要数据库。为减少建模的投入,发展一套稳健及全自动化的程序来建立这个数据库,是相当有意义的。
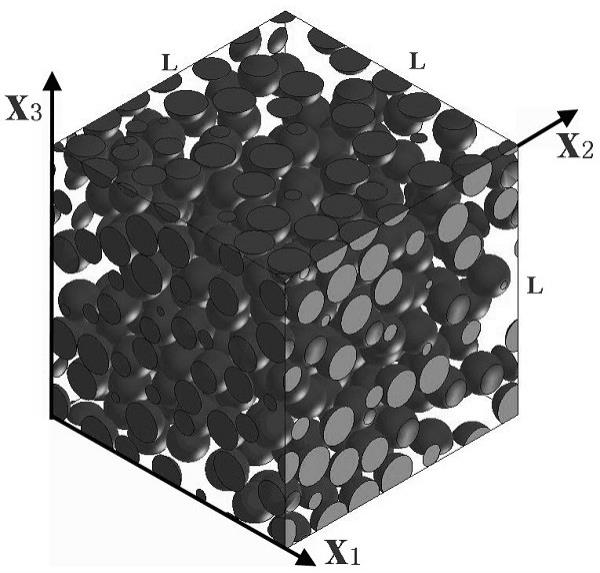
3.本发明的主要目的是提出一个全自动的建模工具,用于构造和验证随机分布的球形颗粒形成复杂均匀化空间模型(图1)。
技术实现要素:
4.本发明所述的算法首先在单一的立方体中创建具有零体积的固定数量的粒子。每个粒子都有一个随机速度矢量。随后球体开始运动,其半径按照增长规律增加。该算法的目标是计算下列事件之一发生的时间: 两个球形颗粒之间的碰撞(算法2)或一个球形颗粒与至少一个单元面之间的碰撞(算法3)。如果两个粒子碰撞,则使用动能原理(算法4)计算它们各自的新速度。同时,为了满足算法的周期性要求,在一个空间边界面上的球面周期性地被复制到相反的空间面上(算法5)。最后当体积分数达到期望值时,主程序算法结束。
附图说明
5.图1 本算法构建的颗粒填充模型。
6.图2 两个碰撞球形颗粒的速度矢量更新示意图。
7.图3 颗粒的镜像二维示意图。
具体实施方式
8.算法1展示了调用算法2-5的主程序。此外,下面的段落详细介绍了各种子程序。给出了详细的描述,以便其他研究人员可以复制代码。在算法描述中,除非另有说明,否则采用以下约定: 具有下标的符号表示每个球形颗粒的唯一实体属性(例如ai), 带上标符号表示从一个计算步骤到另一个计算步骤的实体颗粒特征(例如 rn)。
9.颗粒间碰撞检测算法中的颗粒碰撞检测采用的是二进制算法。在给出该算法之前,需要做如下说明:两个粒子i和j之间的碰撞时间t应当满足以下公式: (1)其中: (1a) (1b)
公式1产生了一个t的一元二次方程,该方程形式如下: (2)其中:
ꢀꢀ
(2a) (2b)(2c)。
10.算法2给出了确定两球形颗粒下一次碰撞时间的各个算法步骤。
11.检测球形颗粒与立方体模型空间壁面的碰撞每个球形颗粒i和它不相交的立方体空间之间的碰撞时间必须计算。球形颗粒i和空间壁面之间的碰撞时间由公式3给出: (3)。
12.这里的和分别表示矢量和的第m阶项。公式3给出了颗粒与立方体模型空间壁面的碰撞碰撞时间,其中位于x1=0,x2=0和x3=0的面分别对应于k=1,k=2,k=3,位于x1=l,x2=l,x3=
l的面分别对应于k=4,k=5,k=6。同时算法3给出了计算球形颗粒与立方空间壁面之间下一次碰撞的时间所需的步骤。
13.碰撞后颗粒运动速度的更新图2显示了两个碰撞的球形颗粒。它们在碰撞前的速度分为两部分: 一部分平行,一部分垂直于连接它们中心的直线。在碰撞过程中,这些垂直的部分保留了下来。在加入半径增长率的影响下,平行组分相互交换。通过添加新的平行分量和垂直分量,计算出球体碰撞后的速度。碰撞后速度求解的详细信息在算法4中给出。
14.。
15.随着球形颗粒与立方体模型空间壁面的碰撞创建球形颗粒的周期镜像当球形颗粒i与一个或多个立方体模型空间壁面相撞时,球体的周期性镜像必须在立方体相对的两侧面形成(面x1=0相对面x1=l,面x2=0相对面x2=l,面x3=0相对面x3=l)。周期性球体的数量取决于与球形颗粒i相交的面的数量。每个周期性颗粒都有一个位置矢量和一个速度矢量。每个周期性颗粒都与颗粒i具有相同的初始速度,但是它的最终速度被一个矢量偏移了。。这里的a,b,c取值范围为,具体的数值取决于球形颗粒在哪个
面上发生镜像。具体在算法5中有详细的说明。
16.。
17.颗粒的周期镜像图3显示的是两个颗粒a和b的镜像图,箭头1标识的是任意颗粒a在面xi=0的镜像,箭头2标识的是任意颗粒a在面xi=l的镜像,并且为了符合周期边界条件,镜像的图像是互补的(两者拼凑成完整的颗粒图像)。同理,箭头3标识的是任意颗粒b在面xj=0的镜像,箭头4标识的是任意颗粒b在面xj=l的镜像。
技术特征:
1.一种三维立方体空间的球形颗粒随机填充算法,其特征在于,所述的算法总共包括1-5步算法,中算法1是主控制程序,它控制程序的整体运行,而算法2,3,4和5是主程序中的子程序,它们用于检测球形颗粒之间,球形颗粒与立方体空间壁面之间的碰撞,碰撞后球形颗粒的速度和位置状态的更新,以及球形颗粒在壁面镜像的生成算法。2.根据权力要求1所述的主控制程序,其特征在于该算法首先在单一的立方体中创建具有零体积的固定数量的粒子,每个粒子都有一个随机速度矢量,随后球体开始运动,其半径按照增长规律增加;该算法的目标是计算下列事件之一发生的时间:两个球形颗粒之间的碰撞或一个球形颗粒与至少一个单元面之间的碰撞;如果两个粒子碰撞,则使用动能原理计算它们各自的新速度,同时,为了满足算法的周期性要求,在一个空间边界面上的球面周期性地被复制到相反的空间面上,最后当体积分数达到期望值v
e
时,主程序算法结束。3.根据权力要求1所述的算法2,其特征在于采用的是二进制算法,计算并确定两球形颗粒下一次碰撞最小时间。4.根据权力要求1所述的算法3,其特征在于计算并确定一个球形颗粒与至少一个单元面之间的碰撞最小时间。5.根据权力要求1所述的算法4,其特征在于确定了球形颗粒发生碰撞后的速度更新算法。6.根据权力要求1所述的算法5,其特征在于确定了球形颗粒与壁面碰撞后的镜像生成算法。
技术总结
本发明提供了一种在三维立方体空间模型中生成一定体积分数的随机球形颗粒填充分布的结构算法。该算法能够在空间环境,深空探测,星际天体相互作用的推演,岩土力学,沙尘暴动态分析等研究领域提供一种非常有效的数值建模手段。通过该算法生成的空间模型能够让上述研究领域在数值建模中受益。该算法首先在单一的立方体中创建具有零体积的固定数量的粒子。每个粒子都有一个随机速度矢量。随后球体开始运动,其半径按照增长规律增加。该算法的目标是计算下列事件之一发生的时间:两个球形颗粒之间的碰撞(算法2)或一个球形颗粒与至少一个单元面之间的碰撞(算法3)。如果两个粒子碰撞,则使用动能原理(算法4)计算它们各自的新速度。同时,为了满足算法的周期性要求,在一个空间边界面上的球面周期性地被复制到相反的空间面上(算法5)。最后当体积分数达到期望值时,算法结束。算法结束。算法结束。
技术研发人员:付远 邱伊健 张友亮
受保护的技术使用者:江西省科学院应用物理研究所
技术研发日:2021.12.03
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。