1.本公开涉及气溶胶生成设备。
背景技术:
2.近来,对不需要燃烧气溶胶生成制品来生成气溶胶的气溶胶生成设备的需求日益增加。特别地,已经对构造成经由非燃烧方法从气溶胶生成物质生成带香味的气溶胶的气溶胶生成设备进行了研究。
技术实现要素:
3.技术问题
4.当使用单独的切换件和印刷电路板(pcb)来识别气溶胶生成设备中的使用中的室时,可能需要多个部件。然而,用于在气溶胶生成设备中安装和定位元件的空间是有限的。
5.本实施方式的技术问题不限于上述技术问题,并且其他技术问题可以从以下实施方式推导得出。
6.解决问题的方案
7.作为解决上述技术问题的技术方案,本公开提供了一种气溶胶生成设备,该气溶胶生成设备包括:多个室,所述多个室构造成容置香味材料;旋转本体,所述旋转本体构造成使所述多个室旋转;线圈天线,所述线圈天线布置成使得通过旋转本体的旋转来改变线圈天线的电感;电感式传感器,所述电感式传感器配置成:对所述电感进行检测;以及基于电感的变化来识别旋转本体的旋转量和旋转方向;以及处理器,所述处理器配置成:基于旋转本体的旋转量和旋转方向从多个室中识别使用中的室。
8.发明的有益效果
9.本公开可以提供一种气溶胶生成设备。详细地,根据本公开的气溶胶生成设备可以使用能够在不接触的情况下检测金属物体的电感式传感器。电感式传感器可以在不接触旋转本体的情况下检测旋转本体的旋转量和旋转方向。因此,气溶胶生成设备可以防止气溶胶生成设备的部件、比如旋转本体的损坏、比如腐蚀和磨损。
10.此外,气溶胶生成设备可以在不使用单独的切换件和印刷电路板(pcb)的情况下通过使用电感式传感器来识别使用中的室。因此,可以增大用于在气溶胶生成设备中安装和定位的可用空间,并且可以缩小气溶胶生成设备的尺寸。有益效果不限于上述示例,并且本说明书中还包括各种其他效果。
附图说明
11.图1是根据实施方式的气溶胶生成设备的构型的图示。
12.图2示出了根据实施方式的旋转本体的立体图。
13.图3示出了根据示例性实施方式的旋转本体。
14.图4示出了根据示例性实施方式的旋转本体的结构。
15.图5示出了根据示例性实施方式的旋转本体的结构。
16.图6示出了根据示例性实施方式的旋转本体的结构。
17.图7示出了根据示例性实施方式的旋转本体的结构。
18.图8示出了根据示例性实施方式的线圈的结构。
19.图9示出了根据示例性实施方式的线圈的结构。
具体实施方式
20.用于实施本发明的最佳方案
21.根据实施方式,提供了一种气溶胶生成设备,该气溶胶生成设备包括:多个室,所述多个室构造成容置香味材料;旋转本体,所述旋转本体构造成使所述多个室旋转;线圈天线,所述线圈天线布置成使得通过旋转本体的旋转来改变线圈天线的电感;电感式传感器,所述电感式传感器配置成:对电感进行检测,以及基于电感的变化来识别旋转本体的旋转量和旋转方向;以及处理器,所述处理器配置成:基于旋转本体的旋转量和旋转方向识别多个室中的使用中的室。
22.气溶胶生成设备还可以包括汽化器,汽化器构造成通过对气溶胶生成物质进行加热来生成气溶胶,并且所述汽化器布置成与使用中的室流体连通,使得气溶胶穿过所述多个室中的使用中的室。
23.气溶胶生成设备还可以包括计数器,计数器配置成:基于所述旋转本体的所述旋转量和所述旋转方向来增加或减少计数值,其中,处理器还配置成基于所述计数值来识别使用中的室。
24.电感式传感器可以将与电感相对应的模拟信号转换成数字信号,以及基于数字信号来识别旋转本体的旋转方向。
25.旋转本体的至少一部分可以包括传导材料。
26.电感可以根据下述中的至少一者而变化:旋转本体与线圈天线之间的距离、旋转本体的形状、在旋转本体中所包含的材料、线圈天线的形状以及线圈天线的匝数。
27.电感式传感器可以基于电感的变化来检测所述多个室是沿第一方向旋转还是沿第二方向旋转。
28.旋转本体可以包括具有相同的尺寸的多个锯齿,所述多个锯齿中的每个锯齿均具有两侧对称的形状。
29.旋转本体可以包括多个锯齿,其中,所述多个锯齿中的每个锯齿是两侧不对称的,或者所述多个锯齿各自具有不同的尺寸,使得旋转本体沿第一方向的旋转和旋转本体沿第二方向的旋转引起不同的电感的变化。
30.旋转本体可以包括多个分隔件,其中所述多个分隔件中的至少两个或更多个分隔件可以分别包括不同的传导材料,使得旋转本体沿第一方向的旋转和旋转本体沿第二方向的旋转引起不同的电感的变化。
31.线圈天线可以包括多个线圈,其中,所述多个线圈中的至少一些线圈具有不同的匝数或具有彼此不同的形状,使得旋转本体沿第一方向的旋转和旋转本体沿第二方向的旋转引起不同的电感的变化。
32.气溶胶生成设备还可以包括显示器,该显示器配置成输出指示使用中的室的视觉
信息。
33.气溶胶生成设备还可以包括抽吸检测传感器,抽吸检测传感器配置成检测使用者的抽吸,并且处理器可以通过使用抽吸检测传感器来对使用中的室的抽吸次数进行计数。
34.当抽吸次数等于或大于阈值时,处理器可以限制使用者的加热操作。
35.用于本发明的方案
36.就描述各种实施方式所使用的术语而言,考虑在本公开的各种实施方式中的结构元件的功能来选择当前广泛使用的一般术语。然而,这些术语的含义可以根据意图、司法判例、新技术的出现等而改变。此外,在一些情况下,可以选择不是通常使用的术语。在这种情况下,将在本公开的描述中的对应的部分处详细描述所述术语的含义。因而,本公开的各种实施方式中所使用的术语应当基于所述术语的含义以及本文中提供的描述来限定。
37.另外,除非明确地进行相反描述,否则用语“包括”及变型诸如“包括有”或“包括了”将被理解为意指包括所陈述的元件但不排除任何其他元件。
38.如本文中所使用的,包括诸如“第一”或“第二”之类的序数的术语可以用于描述各种部件,但部件不应受这些术语的限制。这些术语仅用于将一个部件与其他部件进行区分。
39.在以下实施方式中,术语“纵向方向”表示气溶胶生成设备的纵长方向。
40.在下文中,现在将参照附图更全面地描述本公开,在附图中,本公开的示例性实施方式被示出为使得本领域普通技术人员可以容易地实现本公开。然而,本公开可以以许多不同的形式实施并且不应被解释为限于本文所阐述的实施方式。
41.在下文中,将参照附图对本公开的实施方式进行详细描述。
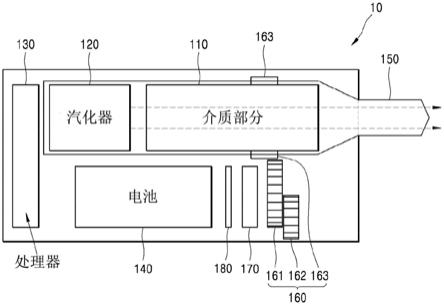
42.图1是根据实施方式的气溶胶生成设备的构型的图示。
43.参照图1,气溶胶生成设备10可以包括介质部分110、汽化器120、处理器130、电池140和烟嘴150。
44.图1示出了与本实施方式相关的气溶胶生成设备10的部件。因此,与本实施方式相关的本领域普通技术人员将理解的是,除了图1中所示的部件之外,气溶胶生成设备10中还可以包括其他通用部件。此外,气溶胶生成设备10的内部结构不限于图1所示的图示。换句话说,根据气溶胶生成设备10的设计,介质部分110、汽化器120、处理器130、电池140和烟嘴150可以不同地布置。
45.与图1中的实施方式相关的气溶胶生成设备10可以通过使用电阻加热方法、感应加热方法、超声振动方法等来生成气溶胶,气溶胶生成设备10是用于向使用者提供气溶胶的设备。
46.介质部分110可以包括多个室,所述多个室由分离件彼此分开。所述多个室中的每个室都可以包括供气溶胶穿过的香味材料。
47.香味材料可以呈固态。例如,香味材料可以以颗粒的形式、即以粉末或小粒子的形式提供。然而,本公开不一定限于此。例如,香味材料可以以呈胶囊状的被切碎的植物叶子的形式提供。
48.香味材料可以包括能够向使用者提供各种香味或风味的成分。
49.香味材料可以包括例如含有挥发性烟草香成分的含烟草材料,添加剂比如香味剂、润湿剂和/或有机酸,调味材料比如薄荷醇或保湿剂,植物提取物,香料,调味品,维生素混合物或其组合。
50.香味材料中的香料的示例可以包括薄荷醇、欧薄荷、绿薄荷油和各种果香成分,但不限于此。
51.香味材料可以包括维生素混合物,并且维生素混合物可以包括维生素a、维生素b、维生素c和维生素e中的至少一者,但实施方式不限于此。
52.介质部分110可以相对于汽化器120旋转,并且介质部分110可以包括沿旋转方向顺序布置并且彼此分开的多个室。
53.例如,介质部分110可以包括两个室、三个室或四个室,但室的数量不限于此。例如,介质部分110可以具有筒形管形状,并且内部空间可以被分隔成四个室。介质部分110可以围绕沿气溶胶生成设备10的纵向方向延伸的旋转轴线沿顺时针方向或逆时针方向旋转。随着介质部分110旋转,包括在介质部分110中的四个室的相对于汽化器120的相对位置可以改变。
54.汽化器120可以通过对液状组合物进行加热来生成气溶胶,并且所生成的气溶胶可以通过介质部分110中的多个室中的一个室提供给使用者。换言之,由汽化器120生成的气溶胶可以穿过气溶胶生成设备10中的空气流动通道,并且空气流动通道可以构造成使得由汽化器120生成的气溶胶可以通过包括在介质部分110中的多个室中的一个室提供给使用者。
55.汽化器120可以通过将液状组合物的相变成气相来生成气溶胶。气溶胶可以表示由液状组合物生成的气体,在气体中,汽化的粒子和空气被混合。
56.例如,汽化器120可以包括液体储存部、液体输送元件和加热元件,但不限于此。例如,液体储存部、液体输送元件和加热元件可以作为独立的模块被包括在气溶胶生成设备10中。
57.液体储存部可以储存液状组合物。液状组合物可以包括呈液态或凝胶态的材料。液状组合物可以在液体储存部中被保持为浸入到多孔材料比如海绵或棉花中的状态。
58.例如,液状组合物可以是包括含有挥发性烟草香成分的含烟草材料的液体、或是包括非烟草材料的液体。液体储存部可以形成为被附接至汽化器120以及从汽化器120拆卸。替代性地,液体储存部可以与汽化器120一体地形成。当液体储存部与汽化器120一体形成时,汽化器120可以是能从气溶胶生成设备10拆卸的。
59.例如,液状组合物可以包括水、溶剂、乙醇、植物提取物、香料、香味剂或维生素混合物。香料可以包括薄荷醇、欧薄荷、绿薄荷油、各种果香成分,但不限于此。香味剂可以包括能够向使用者提供各种香味或口味的成分。维生素混合物可以是维生素a、维生素b、维生素c和维生素e中至少一者的混合物,但不限于此。此外,液状组合物可以包括气溶胶形成物质、比如甘油和丙二醇。
60.液体输送元件可以将液体储存部的液状组合物输送至加热元件。例如,液体输送元件可以是由棉纤维、陶瓷纤维、玻璃纤维或多孔陶瓷制成的芯,但不限于此。
61.加热元件是用于对由液体输送元件输送的液状组合物进行加热的元件。例如,加热元件可以是金属加热丝、金属热板、陶瓷加热器等,但不限于此。此外,加热元件可以包括传导丝比如镍铬合金线并且可以定位成围绕液体输送元件卷绕。加热元件可以被液体储存部围绕。
62.加热元件可以通过流过加热元件的电流加热并且可以将热传递至与加热元件接
触的液状组合物,从而对液状组合物进行加热。然而,实施方式不限于此。例如,汽化器120可以通过超声方法或感应加热方法来生成气溶胶。
63.汽化器120可以被称为烟弹(cartridge)、雾化烟弹(cartomizer)或雾化器,但不限于此。
64.汽化器120和介质部分110可以组合成能够相对于彼此旋转。例如,汽化器120可以是固定的,而介质部分110的多个室可以相对于汽化器120旋转。
65.汽化器120可以布置成与多个室中的一个室流体连通。例如,从汽化器120生成的气溶胶可以穿过所述多个室中的仅一个室,该一个室与汽化器120流体连通。
66.汽化器120可以包括排放端口,排放端口沿气溶胶生成设备10的纵向方向延伸并且将气溶胶输送至介质部分110。液体储存部将由加热元件生成的气溶胶输送至排放端口。因此,从液体储存部提供的气溶胶通过排放端口被输送至介质部分110。
67.在汽化器120和介质部分110被组合至彼此的状态下,汽化器120和介质部分110的相对位置被改变,因此,介质部分110的多个室中的至少一个室可以位于与汽化器120的排放端口相对应的位置处。因此,从汽化器120的排放端口散发的气溶胶穿过香味材料,该香味材料被容置在多个室中的与排放端口相对应的室中。当气溶胶穿过香味材料时,气溶胶的特性可以被改变。
68.当介质部分110包括单个室时,即使在所述室中包括大量的香味材料,香味成分也可能集中迁移,因此香味成分的迁移可能仅持续很短的时间。根据实施方式,气溶胶生成设备10的介质部分110包括多个室并且多个室中的一个室通过介质部分110的旋转被使用。因此,香味成分的迁移的持续时间可能由于室的数目的因素而增加。此外,由于香味成分的迁移的持续时间可以增加,可以与香味成分一起使用的液状组合物的量也可以增加。因此,香味成分可以被长时间使用而无需更换介质部分110,并且当室分别包括不同的香味材料时,使用者可以享用各种香味的气溶胶。
69.气溶胶生成设备10可以包括待保持在使用者嘴中的烟嘴150。从汽化器120生成的气溶胶可以通过烟嘴150散发到气溶胶生成设备10的外部。在示例中,烟嘴150可以形成在气溶胶生成设备10的端部部分处。
70.汽化器120、介质部分110和烟嘴150可以组合以形成气溶胶生成组件。气溶胶生成组件可以具有各种形状、比如长方体或立方体。气溶胶生成组件可以以可拆卸的方式联接至气溶胶生成设备10。当气溶胶生成组件被插入到气溶胶生成设备10中时,气溶胶生成设备10可以通过操作汽化器120来生成气溶胶。由汽化器120生成的气溶胶通过介质部分110输送至使用者。
71.处理器130可以控制气溶胶生成设备10的整体操作。详细地,控制器130不仅可以控制电池140和汽化器120的操作,还可以控制包括在气溶胶生成设备10中的其他部件的操作。此外,处理器130可以检查气溶胶生成设备10的部件中的每个部件的状态以确定气溶胶生成设备10是否能够工作。
72.处理器130可以被实现为多个逻辑门阵列,或者可以被实现为通用的微处理器和存储有可在该微处理器中执行的程序的存储器的组合。此外,本领域普通技术人员将理解的是,其他类型的实现也是可以的。
73.电池140提供用于使气溶胶生成设备10工作的电力。例如,电池140可以提供电力
来对汽化器120进行加热,并且电池140可以提供用于操作处理器130的电力。此外,电池140可以提供用于安装在气溶胶生成设备10中的显示器、传感器、马达等的操作的电力。
74.气溶胶生成设备10可以包括旋转本体160、线圈天线170和电感式传感器180。旋转本体160可以包括转盘齿轮161、转盘162和介质部分齿轮163。电感式传感器180可以包括除处理器130之外的处理器。下文中,将参照图2对旋转本体160、线圈天线170和电感式传感器180的操作方法进行详细描述。
75.图2示出了根据实施方式的旋转本体的立体图。
76.参照图2,旋转本体160可以包括转盘齿轮161、转盘162和介质部分齿轮163。由于图2中的介质部分110与图1中的介质部分110相对应,因此将省略重复的描述。
77.在实施方式中,旋转本体160可以使介质部分110的多个室旋转,并且电感可以通过旋转本体160的旋转而改变。
78.转盘齿轮161可以与转盘162和介质部分齿轮163接合,并且可以将施加到转盘162的旋转能量传递至介质部分齿轮163。电感变化可以是由转盘齿轮161的旋转引起的。
79.转盘162可以通过使用者的动作而旋转。为此,转盘162的一部分可以暴露于气溶胶生成设备10的外部。转盘162可以与转盘齿轮161接合,并且由使用者施加的旋转力可以通过转盘162传递至转盘齿轮161。
80.介质部分齿轮163可以布置成围绕介质部分110,使得介质部分110与介质部分齿轮163一起旋转。介质部分110可以包括由分离件分开的多个室,并且所述多个室可以通过介质部分齿轮163旋转。虽然示出了介质部分110包括四个室,但室的数目不限于此。
81.转盘齿轮161、转盘162和介质部分齿轮163可以具有各种形状、比如图2所示的锯齿形状,并且转盘齿轮161、转盘162和介质部分齿轮163可以不同地布置。另外,转盘齿轮161、转盘162和介质部分齿轮163可以具有不同的锯齿数,并且可以根据某个比率来确定锯齿数。例如,转盘162的锯齿数、转盘齿轮161的锯齿数与介质部分齿轮163的锯齿数的比率可以是1:2:3,并且转盘162、转盘齿轮161和介质部分齿轮163的锯齿数分别可以是四个、八个和十二个。然而,锯齿的数量和锯齿数量的比率不限于此。
82.转盘齿轮161、转盘162和介质部分齿轮163的旋转方向可以彼此不同或相同。例如,当转盘162沿顺时针方向旋转时,转盘齿轮161可以沿逆时针方向旋转并且介质部分齿轮163可以沿顺时针方向旋转。然而,实施方式不限于此。
83.根据实施方式,可以省略转盘齿轮161、转盘162和介质部分齿轮163中的至少一者。例如,可以省略转盘162和介质部分齿轮163,并且转盘齿轮161可以暴露于气溶胶生成设备的外部,使得使用者可以对转盘齿轮161进行旋转。在这种情况下,转盘齿轮161可以直接联接至介质部分110,使得介质部分110与转盘齿轮161一起旋转。
84.转盘齿轮161、转盘162和介质部分齿轮163可以包括各种材料,并且转盘齿轮161、转盘162和介质部分齿轮163可以分别包括不同的材料。在实施方式中,旋转本体160的至少一部分可以包括传导材料。例如,转盘齿轮161可以包括传导材料,而转盘162和介质部分齿轮163可以包括非传导材料。转盘齿轮161的锯齿的一部分可以包括传导材料,而其余部分可以包括非传导材料。
85.线圈天线170的电感可以随着旋转本体160的旋转而改变。线圈天线170也可以称为框架天线或环圈天线。例如,在转盘齿轮161旋转时,转盘齿轮161下方的线圈天线170可
以通过电磁感应而引起电感变化。
86.如图2所示,线圈天线170可以布置成平行于或垂直于转盘齿轮161,但不限于此。
87.电感式传感器180可以检测电感变化并输出与旋转本体160的旋转量和/或旋转方向相对应的信号。例如,当使用者旋转转盘162时,与转盘162接合的转盘齿轮161和与转盘齿轮161接合的介质部分163可以一起旋转。线圈天线170的电感可以根据转盘齿轮161的旋转而变化。电感式传感器180可以检测所述电感变化。
88.在实施方式中,旋转本体160可以使介质部分110旋转,并且电感式传感器180可以输出与旋转本体160的旋转量和旋转方向相对应的信号。例如,当介质部分110包括四个室时,旋转本体160可以一次将介质部分110旋转90
°
。在这种情况下,电感式传感器180可以输出与介质部分110沿顺时针方向旋转90
°
相对应的信号。
89.在实施方式中,电感式传感器180可以将与所测量的电感相对应的模拟信号转换成数字信号。电感式传感器180和/或处理器130可以基于所检测到的电感变化(例如,基于由电感式传感器180输出的模拟信号和/或数字信号)来识别旋转本体160的旋转量和旋转方向。电感式传感器180可以包括模数转换器(adc),并且可以通过使用adc将模拟信号转换成数字信号。例如,当使用者对旋转本体160进行旋转以使介质部分110沿顺时针方向旋转90
°
时,电感变化可以由旋转本体160的旋转而引起。电感式传感器180可以通过使用adc将与所述电感变化相对应的模拟信号转换成数字信号,并且电感式传感器180可以输出数字信号。
90.电感式传感器180可以检测受到旋转本体160与线圈天线170之间的距离、旋转本体160的形状、在旋转本体160中所包含的材料、线圈天线170的形状和线圈天线170的匝数中的至少一者影响的电感。例如,当旋转本体160与线圈天线170之间的距离由于旋转本体160的旋转而改变时,可能会发生电感变化,并且电感式传感器180可以检测到该电感变化。此外,电感也可能受到线圈天线170的形状和匝数的影响,这将参照图8和图9进行描述。
91.在实施方式中,电感式传感器180可以基于电感变化来感测所述多个室是沿第一方向旋转还是沿第二方向旋转。第一方向和第二方向可以是相反的方向。例如,第一方向可以是顺时针方向,而第二方向可以是逆时针方向。
92.在转盘162仅沿第一方向旋转而介质部分齿轮163仅沿第二方向旋转的实施方式中,电感式传感器180可以基于电感变化而感测多个室沿第二方向的旋转量。
93.在旋转本体160可以沿任一方向旋转的另一实施方式中,电感式传感器180可以检测多个室的旋转量和旋转方向。例如,电感式传感器180可以检测到多个室沿第一方向旋转了90
°
并且然后在第二方向上旋转了180
°
。替代性地,基于由电感式传感器180检测到的电感变化,处理器130可以确定多个室的旋转量和/或旋转方向。
94.电感式传感器180可以在不接触旋转本体160的情况下检测电感变化并输出与旋转本体160的旋转量和旋转方向相对应的信号。因此,可以防止对各部件比如旋转本体160、线圈天线170、电感式传感器180等的研磨损坏。
95.再次参照图1,旋转本体160可以使介质部分110旋转,这导致电感变化。电感式传感器180可以检测该电感变化并输出与旋转本体160的旋转量和旋转方向相对应的信号。
96.处理器130可以基于从电感式传感器180输出的信号来确定多个室中使用的室。使用中的室对应于与汽化器120流体连通的室,并且从汽化器120生成的气溶胶可以穿过使用
中的室。使用中的室是指介质部分110的多个室中的与汽化器120的排放端口对准的一个室。
97.在实施方式中,气溶胶生成设备10还可以包括计数器。计数器可以通过使用与旋转本体160的旋转量和旋转方向相对应的信号作为输入信号来增加或减少计数值。计数器可以存储计数值或输出该计数值作为输出信号。
98.例如,假设介质部分110包括按顺时针方向依次排列的第一室、第二室、第三室和第四室的四个室,并且使用中的室是第一室。在旋转本体160旋转时,介质部分110可以沿顺时针方向旋转180
°
,使得第三室可以与汽化器120流体连通。假设与第一室相对应的计数值被设定为零,则计数器可以通过使用指示介质部分110沿顺时针方向旋转了180
°
的信号作为输入信号将计数值增加2。由于与计数值2相对应的室为第三室,因此处理器130可以将第三室确定为使用中的室。
99.气溶胶生成设备10还可以包括除了包括电池140、处理器130、介质部分110和汽化器120之外的通用部件。在实施方式中,气溶胶生成设备10可以包括使用者界面,例如能够输出视觉信息的显示器、用于输出触觉信息的马达和/或用于输出声音的扬声器。显示器可以输出指示使用中的室的视觉信息。例如,显示器可以输出与使用中的室的香味相对应的光。由于可以向使用者提供指示使用中的室的视觉信息,因此使用者可以通过选择多个室中的一个室来容易地改变气溶胶的香味。作为另一示例,使用者界面可以输出指示与使用中的室相对应的当前激活的香味的信息。作为另一示例,使用者界面可以输出具有当前被激活的香味的可用抽吸次数。
100.此外,气溶胶生成设备10可以包括至少一个传感器。在实施方式中,气溶胶生成设备10可以包括配置成检测使用者的抽吸的抽吸检测传感器。抽吸检测传感器可以在使用者抽吸气溶胶时检测空气的压力或流速的变化。抽吸检测传感器可以包括压力传感器、空气流速传感器等。
101.处理器130可以通过使用抽吸检测传感器来对使用中的室的抽吸次数进行计数。例如,处理器130可以确定使用中的室,并且可以通过使用压力传感器来对使用中室中的抽吸次数进行计数。
102.当抽吸次数等于或大于阈值时,处理器130可以限制汽化器120的加热操作。例如,当所计数的抽吸次数为五十或更多时,汽化器120的加热操作可以被限制。由于汽化器120的加热操作被限制,因此使用者不会抽吸到具有焦味味道的气溶胶,并且可以提高使用者的满意度。
103.当所计数的抽吸次数等于或大于阈值时,气溶胶生成设备10可以通过使用显示器、扬声器等来向使用者提供通知。
104.图3至图7示出了根据不同实施方式的旋转本体的结构。
105.参照图3,旋转本体310可以包括多个锯齿。尽管图3仅示出了旋转本体310的转盘齿轮,但实施方式不限于此。例如,根据需要,转盘和/或介质部分齿轮也可以包括在旋转本体310中。转盘、转盘齿轮和介质部分齿轮可以分别具有不同的旋转量,并且各自的旋转量可以根据某个比率来确定。图3所示的旋转本体310、线圈天线320和电感式传感器330分别对应于图2所示的旋转本体160、线圈天线170和电感式传感器180,因此省略重复的描述。
106.旋转本体310的多个锯齿可以具有相同的尺寸,并且每个锯齿可以是两侧对称的。
当旋转本体310旋转时,可以发生电感变化。电感式传感器330可以基于电感变化来检测沿第一方向或第二方向中的一个方向旋转的多个室。例如,在旋转本体310仅沿第一方向旋转的实施方式中,电感式传感器330可以检测多个室沿第一方向的旋转量。
107.电感变化可以受旋转本体310与线圈天线320之间的距离的影响。由于多个锯齿都具有相同的尺寸并且每个锯齿都是两侧对称的,因此从电感式传感器330输出的信号可以具有均匀的矩形脉冲,如图3所示。
108.该图表可以指示从电感式传感器330输出的信号。该图表的横向轴线可以指示时间,并且该图表的竖向轴线可以指示所检测到的电感。
109.电感式传感器330可以设置为高态有效或低态有效的。电感式传感器330可以通过使用图表的高态有效或低态有效状态来输出与旋转量相对应的信号。例如,当电感式传感器330被设置为高态有效时,当代表所测量的电感的数字信号从低变到高时,可以输出与旋转本体310的旋转量相对应的信号。例如,每次数字信号从低变到高时,电感式传感器330可以输出与介质部分的90
°
旋转相对应的信号。在另一示例中,当数字信号从低到高变化三次时,电感式传感器330可以输出与介质部分的90
°
旋转相对应的信号。
110.参照图4,旋转本体410可以包括多个锯齿。图4仅示出了旋转本体410的转盘齿轮,但实施方式不限于此。例如,根据需要,转盘和介质部分齿轮也可以被包括在旋转本体410中。图4所示的旋转本体410、线圈天线420和电感式传感器430对应于旋转本体310、线圈天线320和电感式传感器330,因此省略重复的描述。
111.旋转本体410的多个锯齿可以具有相同的尺寸并且每个锯齿可以是两侧不对称的。当旋转本体410旋转时,可以发生电感变化。由于每个锯齿是不对称的,因此旋转本体410的锯齿可以分别相对于沿第一方向的旋转和沿第二方向的旋转引起不同的电感变化。
112.因此,电感式传感器430可以基于电感变化来检测多个室的旋转方向。例如,电感式传感器430可以检测多个室沿第一方向旋转了90
°
并且然后沿第二方向旋转了180
°
。
113.电感变化可以受到旋转本体410与线圈天线420之间的距离以及旋转本体410的锯齿形状的影响。由于图4中所示的旋转本体410的多个锯齿均是两侧不对称的并且具有相同的尺寸,因此代表由电感式传感器430检测到的电感的图表可以具有如图4中所示的锯齿形波。
114.图表的横向轴线可以表示时间,并且图表的竖向轴线可以表示所检测到的电感。如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转会引起不同的电感变化,这是因为每个锯齿是不对称的。假设图4所示的图表代表沿第一方向的旋转,那么,在沿第二方向旋转的情况下,图表将水平翻转。
115.电感式传感器430可以基于电感的高态有效或低态有效状态来检测旋转量。例如,每次电感从低变到高时,电感式传感器430可以输出与介质部分的90
°
旋转相对应的信号。此外,电感式传感器430可以基于电感变化的符号来检测电感变化的量。例如,当电感变化的符号为正时(即,当电感增加时),电感式传感器430可以输出与第一方向相对应的信号。
116.参照图5,旋转本体510可以包括多个锯齿。图5仅示出了旋转本体510的转盘齿轮,但实施方式不限于此。例如,根据需要,旋转本体510中还可以包括转盘齿轮和/或介质部分齿轮。图5中所示的旋转本体510、线圈天线520和电感式传感器530对应于图4中所示的旋转本体410、线圈天线420和电感式传感器430,因此省略重复的描述。
117.如图5中所示,旋转本体510的多个锯齿可以具有不同的尺寸。当旋转本体510旋转时,会发生电感变化。旋转本体510的锯齿可以布置成使得沿第一方向的旋转和沿第二方向的旋转根据锯齿的不同尺寸引起不同的电感变化。
118.因此,电感式传感器530可以检测多个室的旋转方向以及旋转量。例如,电感式传感器530可以检测到多个室沿第一方向旋转了180
°
并且然后沿第二方向旋转了90
°
。
119.电感变化可以受到旋转本体510与线圈天线520之间的距离的影响。图5中所示的旋转本体510的多个锯齿分别具有不同的尺寸,并且每个锯齿均是两侧对称的。因此,代表由电感式传感器530检测到的电感的图表可以包括具有不同幅值的矩形脉冲,如图5所示。
120.如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转可以根据多个锯齿的不同尺寸而引起不同的电感变化。假设图5所示的图表代表旋转本体510沿第一方向的旋转,那么在沿第二方向旋转的情况下,图表将水平翻转。
121.电感式传感器530可以基于电感的高态有效或低态有效状态检测旋转量,并且电感式传感器530可以基于电感变化的符号和/或量来检测旋转方向。例如,当电感从低到高变化两次时,电感式传感器530可以输出与介质部分110旋转180
°
相对应的信号。此外,电感式传感器530可以基于电感变化的符号和/或量(即,基于代表所测量的电感的图表中的两个连续脉冲之间的差)来输出与旋转方向相对应的信号。
122.在实施方式中,当与锯齿的尺寸相对应的室被预先设置时,气溶胶生成设备的处理器可以基于根据锯齿的尺寸的电感变化的幅值来识别与电感变化的幅值相对应的室。
123.参照图6,旋转本体610可以包括多个锯齿。图6仅示出了旋转本体610的转盘齿轮,但实施方式不限于此。例如,根据需要,旋转本体610中还可以包括转盘和/或介质部分齿轮。图6中所示的旋转本体610、线圈天线620和电感式传感器630对应于旋转本体510、线圈天线520和电感式传感器530,并且因此省略重复的描述。
124.旋转本体610的多个锯齿可以具有相同的尺寸或可以不具有相同的尺寸。在旋转本体610的多个锯齿中,至少两个或更多个锯齿可以分别包括不同的传导材料。例如,旋转本体610可以包括四个锯齿,并且四个锯齿可以分别包括不同的传导材料。四个锯齿可以分别包括金(au)、银(ag)、铜(cu)和镍(ni),但不限于此。
125.当旋转本体610旋转时,可以发生电感变化。旋转本体610的锯齿可以布置成使得沿第一方向的旋转和沿第二方向的旋转根据锯齿的不同材料而引起不同的电感变化。
126.因此,电感式传感器630可以检测多个室的旋转方向以及旋转量。例如,电感式传感器630可以检测多个室沿第一方向旋转了180
°
并且然后沿第二方向旋转了180
°
。
127.电感变化可以受旋转本体610中包含的材料影响。图6中所示的旋转本体610的多个锯齿具有相同的尺寸并且两侧对称,但各个锯齿包括不同的材料。因此,代表所检测到的电感的图表可以具有带有不同幅值的矩形脉冲,如图6所示。
128.如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转可以根据锯齿的不同材料而引起不同的电感变化。假设图6中所示的图表代表旋转本体610沿第一方向的旋转,那么,在沿第二方向旋转的情况下,图表将水平翻转。
129.电感式传感器630可以基于所测量的电感的高态有效或低态有效状态来检测旋转量。例如,当电感从低到高变化两次时,电感式传感器630可以输出与介质部分旋转90
°
相对应的信号。
130.此外,电感式传感器630可以基于电感变化的符号和/或量来检测旋转方向。例如,当电感增加了第一值时,电感式传感器630可以输出与第二方向相对应的信号,以及当电感减少了第二值时,电感式传感器630可以输出与第一方向相对应的信号,但实施方式不限于此。
131.在实施方式中,当在多个室中预先设置与特定电感变化的量相对应的室时,气溶胶生成设备的处理器可以基于电感变化的量来识别该室。
132.参照图7,旋转本体710可以包括多个锯齿。图7仅示出了旋转本体710的转盘齿轮,但实施方式不限于此。例如,根据需要,在旋转本体710中还可以包括转盘和/或介质部分齿轮。图7中所示的旋转本体710、线圈天线720和电感式传感器730对应于图6中的旋转本体610、线圈天线620和电感式传感器630,因此省略重复的描述。
133.旋转本体710的多个锯齿可以具有相同的尺寸或可以不具有相同的尺寸。旋转本体710可以包括多个分隔件,并且多个分隔件中的至少两个或更多个分隔件可以分别包括不同的传导材料。旋转本体710中的一个分隔件可以是锯齿,或者也可以是锯齿的一部分。例如,如图7所示,旋转本体710可以包括四个锯齿,并且四个锯齿中的每个锯齿都可以包括两个分隔件。八个分隔件可以分别包括不同的传导材料。
134.当旋转本体710旋转时,可以发生电感变化。旋转本体710的锯齿可以布置成使得沿第一方向的旋转和沿第二方向的旋转引起不同的电感变化。
135.因此,电感式传感器730可以检测多个室的旋转方向以及旋转量。例如,电感式传感器730可以检测多个室沿第一方向旋转了180
°
并且然后沿第二方向旋转了90
°
。
136.电感变化可能受到包括在旋转本体710中的材料的影响。图7中所示的旋转本体710的多个锯齿可以具有相同的尺寸,并且每个锯齿均是两侧对称的,但限制性分隔件包括不同的材料。因此,代表由电感式传感器730检测到的电感的图表可以具有带有不同幅值的两侧不对称的脉冲,如图7所示。
137.如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转可以根据分隔件的不同材料而引起不同的电感变化。假设图7所示的图表代表旋转本体710沿第一方向的旋转,那么,在沿第二方向旋转的情况下,图表将会水平翻转。
138.电感式传感器730可以基于电感的高态有效或低态有效状态来检测旋转量。例如,当电感从低到高变化两次时,电感式传感器730可以输出与介质部分旋转180
°
相对应的信号。
139.在实施方式中,电感式传感器730可以基于电感变化的量和符号来检测旋转方向。例如,当电感增加了第一值时,电感式传感器730可以输出与第二方向相对应的信号,以及当电感减少了第二值时,电感式传感器730可以输出与第一方向相对应的信号,但实施方式不限于此。
140.图8和图9示出了根据不同实施方式的线圈的结构。
141.参照图8,线圈天线820可以包括多个线圈。图8仅示出了旋转本体810的转盘齿轮,但实施方式不限于此。例如,根据需要,旋转本体810中还可以包括转盘和/或介质部分齿轮。图8中所示的旋转本体810、线圈天线820和电感式传感器830对应于图3中的旋转本体710、线圈天线720和电感式传感器730,因此省略重复的描述。
142.线圈天线820中的多个线圈可以具有相同的尺寸或可以不具有相同的尺寸。多个
线圈中的至少一些线圈可以具有不同的匝数。
143.当旋转本体810旋转时,电感可以发生变化。线圈天线820中的线圈可以布置成使得旋转本体810沿第一方向的旋转和沿第二方向的旋转根据线圈的不同匝数而引起不同的电感变化。
144.因此,电感式传感器830可以检测多个室的旋转方向以及旋转量。例如,电感式传感器830可以检测多个室沿第一方向旋转了180
°
并且然后沿第二方向旋转了90
°
。
145.电感变化可以受到线圈匝数的影响。在图8中所示的线圈天线820的多个线圈具有相同的尺寸以及不同的匝数的实施方式中,代表由电感式传感器830检测到的电感的图表可以具有带有不同幅值的两侧对称的脉冲,如图8所示。
146.如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转可以引起不同的电感变化。假设图8所示的图表代表沿第一方向的旋转,那么在沿第二方向旋转的情况下,图表将会水平翻转。
147.电感式传感器830可以基于所检测到的电感的高态有效或低态有效状态来检测旋转量。例如,当电感从高到低变化两次时,电感式传感器830可以输出与介质部分110旋转180
°
相对应的信号。
148.在实施方式中,电感式传感器830可以基于电感变化的量和/或符号来检测旋转方向。例如,当电感增加了第一值时,电感式传感器830可以输出与第二方向相对应的信号,以及当电感减少了第二值时,电感式传感器830可以输出与第一方向相对应的信号,但实施方式不限于此。
149.在实施方式中,线圈天线820的多个线圈可以在其中分别包括芯,芯分别包括不同的材料。例如,芯可以包括铁氧体、镍、锌等。具有分别包括不同材料的芯的多个线圈相对于旋转本体810沿第一方向的旋转和沿第二方向的旋转可以分别引起不同的电感变化。
150.参照图9,线圈天线920可以包括多个线圈。图9仅示出了旋转本体910的转盘齿轮,但实施方式不限于此。例如,根据需要,旋转本体910中还可以包括转盘和介质部分齿轮。图9中所示的旋转本体910、线圈天线920和电感式传感器930对应于图8中所示的旋转本体810、线圈天线820和电感式传感器830,因此省略重复的描述。
151.线圈天线920中的多个线圈中的一些线圈可以具有不同的形状。
152.当旋转本体910旋转时,可以发生电感变化。线圈天线920中的线圈可以布置成使得旋转本体910沿第一方向的旋转和沿第二方向的旋转根据线圈的不同形状而引起不同的电感变化。
153.因此,电感式传感器930可以检测多个室的旋转方向以及旋转量。例如,电感式传感器930可以检测多个室沿第一方向旋转了180
°
并且然后沿第二方向旋转了90
°
。
154.电感变化可以受线圈形状的影响。图9中所示的线圈天线920中的多个线圈分别具有不同的形状。例如,线圈天线920可以包括四个线圈,并且四个线圈可以分别具有圆形形状、三角形形状、方形形状和星形形状。代表由电感式传感器930检测到的电感的图表可以具有带有不同幅值的两侧对称的脉冲,如图9所示。
155.如前所述,在本实施方式中,沿第一方向的旋转和沿第二方向的旋转可以引起不同的电感变化。假设图9中所示的图表代表沿第一方向的旋转,那么,在沿第二方向旋转的情况下,图表将会水平翻转。
156.电感式传感器930可以基于所检测到的电感的高态有效或低态有效状态来检测旋转量。例如,当电感从高到低变化两次时,电感式传感器930可以输出与介质部分110旋转90
°
相对应的信号。
157.在实施方式中,电感式传感器930可以基于电感变化的量和/或符号来检测旋转方向。例如,当电感已经增加了第一值时,电感式传感器930可以输出与第一方向相对应的信号,以及当电感已经减少了第二值时,电感式传感器930可以输出与第二方向相对应的信号,但实施方式不限于此。
158.电感式传感器930可以根据旋转本体910和线圈天线920的结构来检测电感变化,并且计数器可以通过使用与旋转本体910的旋转量和旋转方向相对应的信号作为输入信号来增加或减少计数器值。处理器可以通过使用计数值将与计数值相对应的室确定为使用中的室。然而,实施方式不限于此,并且可以使用基于旋转量和旋转方向来识别使用中的室的各种方法。例如,当与一定的电感变化的量相对应的室被预先设置时,可以根据电感变化的量来识别多个室中使用的室。如此,可以向使用者通知当前被激活的香味和对于使用中的室可用的抽吸次数。因此,可以防止香味成分迁移的意外终止。此外,因为电感式传感器具有较小的尺寸,因此,根据实施方式的气溶胶生成设备可以被小型化。
159.上述实施方式的描述仅是示例,并且本领域的普通技术人员将理解的是,可以对上述实施方式进行各种改变和等同替换。因此,本公开的范围应由所附权利要求限定,并且落入与权利要求所描述的范围等同的范围内的所有差异均应被理解为包括在由权利要求所限定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。