1.本发明涉及测量方法技术领域,尤其涉及一种通过无线电高度表实现海浪高度实时检测的方法。
背景技术:
2.海水处于不停的运动中,不仅发生在表层,而且还直至近底层的深处,海表面主要运动形式包括波浪、洋流、潮汐以及对气压的动态响应,因此实际海面是一系列波合成的结果。海面的有效波高的定义为一段时间内观测到前三分之一大波的平均波高,海况信息与发生概率见表1所示。
3.表1海况信息与发生概率情况
4.海况有效波高(m)发生概率(%)0-10-0.1020.1-0.55.730.5-1.2519.741.25-2.528.352.5-4.019.564.0-6.017.576.0-9.07.689.0-14.01.7》8》14.00.1
5.海况信息或有效波高直接影响掠海飞行器、水上飞机等设备的正常使用。巡航弹等攻击型武器,通过掠海飞行可以有效规避被敌方雷达发现,但同时又增加了导弹与海浪相撞的风险,从而降低了巡航导弹生存能力。因此,实时获取准确的海浪高度对实现掠海飞行器可靠飞行非常重要。
6.目前海况信息或浪高信息的获取主要依靠观测站,或是通过星载高度计测高数据反演获得海况结果。观测站测量数据覆盖范围有限,不能覆盖到外海或深海领域,通过星载高度计测高数据反演获得的海况信息实时性不强。
技术实现要素:
7.本发明的目的在于提供一种海浪高度实时检测方法,实时性强且可以覆盖到外海和深海领域。
8.为了达到上述目的,本发明提供一种海浪高度实时检测方法,在每个探测周期内,高度表发射固定数量的脉冲串,收到同样数量的脉冲串回波,对回波信号进行方位向fft和距离向fft,结合平台姿态信息提取弹下点条带高度,将弹下点测量高度结合平台飞行距离,实现浪高解算。
9.所述高度表发射脉冲的重复频率prf为:
[0010][0011]
其中,λ,vs,θ分别表示探测信号波长、平台水平飞行速度、高度表飞行向天线波束宽度。
[0012]
所述高度表在一个探测周期内发射的脉冲个数n为:
[0013]
n=0.5h/ρ
x
vt
rp
ꢀꢀ
(2)
[0014]
其中,λ,v,n,t
rp
分别表示波长、水平飞行速度、积累脉冲数、脉冲重复周期,ρ
x
,h分别表示分辨率和平台高度,要求ρ
x
小于12.5m。
[0015]
得到海浪高度后,计算有效波高:
[0016][0017][0018]
其中,hi是单次测量的海浪高度,he为海浪高度的均值,h
eff
计算值为海浪有效波高。
[0019]
计算浪高时要求平台飞行距离不小于1km。
[0020]
本发明实时性强且可以覆盖到外海和深海领域。
附图说明
[0021]
图1为高度表高分辨探测信号示意图。
[0022]
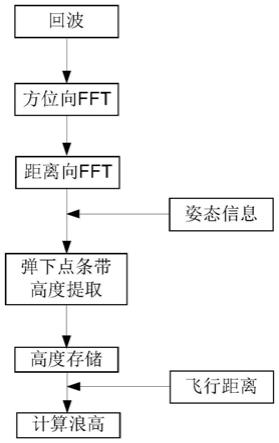
图2为高分辨探测信号处理流程图。
[0023]
图3为一定飞行距离上的海浪高度测量数据示意图。
具体实施方式
[0024]
以下根据图1~图3,具体说明本发明的较佳实施例。
[0025]
无线电高度表用于实现飞行器和地、海面之间的相对高度测量,是掠海飞行器必备的测高敏感器。无线电高度表采用宽带调频体制,最大调频带宽不小于200mhz,探测天线(收发天线分置)安装在飞行器腹部,用于探测飞行器距离海面的高度,可以确保对相对高度的高分辨探测。
[0026]
高度表天线波束一定的情况下,当飞行器高度较低时,天线探测波束照射面积较小(照射区域小于涌浪的半波长),雷达探测区域只照射到一个海浪波长的一部分;当飞行器高度较高,会使天线探测波束照射面积相对较大(照射区域大于涌浪的波长);因此高度不同,无线电高度表对海浪的观测尺度不同,会造成浪高测量误差。
[0027]
为了全面实现海浪测量,本发明提供一种通过无线电高度表实现海浪高度实时检测的方法,通过对飞行向海面高分辨观测以确保高度表在不同高度对海浪观测尺度一致。
[0028]
高度表通过提高观测脉冲的重复频率来实现高分辨探测,所述高度表的信号形式
如图1所示,在平台的运动过程中对海面进行多次观测,并对回波信号进行相干处理。高度表在每个探测周期内发射一定数量的脉冲串,每个脉冲的发射信号均为宽带调频信号。
[0029]
高度表发射的是线性调频信号,在接收到海面反射的回波信号后,将回波信号与参考信号(与发射信号相同)混频、滤波之后得到的中频信号是一个单频脉冲信号,其频率与回波信号的延时成正比。
[0030]
其中,脉冲重复频率(prf)由下式计算:
[0031][0032]
其中,λ,vs,θ分别表示探测信号波长、平台水平飞行速度、高度表天线波束宽度(飞行向)。
[0033]
脉冲个数由下式计算:
[0034]
n=0.5h/ρ
x
vt
rp
ꢀꢀ
(2)
[0035]
其中,λ,v,n,t
rp
分别表示波长、水平飞行速度、积累脉冲数、脉冲重复周期,ρ
x
,h分别表示分辨率和平台高度,为了实现对一个波长的海浪高度有效测量,要求ρ
x
小于12.5m。
[0036]
当高度表的频段为k波段,天线波束宽度θ为20
°
,飞行器速度为150m/s时,按照公式(1)计算脉冲重复频率(prf)不小于8.2khz;确定脉冲周期后,以海面分辨率小于12.5m按照公式(2)计算脉冲个数,当飞行器在1000m高度平飞时,计算n=27,为了方便快速傅立叶变换计算,设置基本的脉冲合成个数n为32,在该参数下可实现分辨率ρ
x
约为10.5m。
[0037]
如图2所示,在每个探测周期内,高度表发射一定数量的脉冲串,并会收到同样数量的脉冲串回波,通过对中频回波进行方位向fft和距离向fft,并结合平台姿态信息可以实现弹下点条带高度提取,将弹下点测量高度存储记录,结合平台飞行距离,实现浪高解算。
[0038]
海浪波长尺度与海情相关,一般情况下,海情越恶劣海浪波长尺度越大,因此计算浪高需要积累一定的飞行距离,结合海浪波长统计值。计算浪高时要求平台飞行距离不小于1km,在一定飞行距离上获取的海浪高度如图3所示,高度测量值为h1~hn。
[0039]
得到海浪高度后,计算有效波高:
[0040][0041][0042]
其中,hi是单次测量的海浪高度,he为海浪高度的均值,h
eff
计算值为海浪有效波高。
[0043]
结合表1海况信息与发生概率情况数据得到实时海况信息,为飞行器高度控制提供实时支撑数据。
[0044]
表1
[0045]
海况有效波高(m)发生概率(%)
0-10-0.1020.1-0.55.730.5-1.2519.741.25-2.528.352.5-4.019.564.0-6.017.576.0-9.07.689.0-14.01.7》8》14.00.1
[0046]
本发明实时性强且可以覆盖到外海和深海领域。
[0047]
需要说明的是,在本发明的实施例中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述实施例,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0048]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。