1.本发明属于驾驶速度预测技术领域,具体涉及一种基于前驾驶行为的驾驶速度预测方法和系统。
背景技术:
2.随着新建和改扩建道路的不断增加,道路交通安全问题也逐渐凸显,在道路通车运营时对道路的行车安全性进行分析评价,有利于推进交通出行的数字化,提前辨识道路设计中存在的安全风险,对减少道路事故发生、提高道路交通安全水平具有显著性意义。
3.目前道路安全评价技术的基础是通过计算运行速度、以运行速度为基准校核道路设计参数是否满足运行速度对应的规范指标值,因此客观、精确地预测道路运行速度,对优化道路交通安全评价技术、提高道路的交通安全水平起到了显著的作用。
4.当前交通安全评价技术采用的运行速度预测模型是建立在断面观测数据上的半理论半统计模型,该模型在进行运行速度预测时首先将道路划分为不同的路段单元,进而在各路段单元上选取特征断面,根据各路段单元的几何特征、使用预设的速度预测模型计算各路段特征断面处的运行速度。这种方法充分考虑了道路特征对驾驶人速度的影响,但是不能充分反映出驾驶人使用道路的方式,以及存在的潜在风险路段,其原因如下:
5.1、该方法将道路划分为不同特征断面,人为割裂了道路在空间上的连续性,不符合驾驶人面对的实际道路环境,也无法精确地反映驾驶人驾驶过程中对道路连续几何线形的速度决策反馈;
6.2、驾驶人群体是一个离散群体,不同驾驶人对道路安全性的理解以及采取的驾驶策略差异性很大,统计模型不能反映出不同驾驶人之间驾驶行为的差异性,因此不能客观评价不同驾驶人面临的交通安全风险;
7.3、在驾驶过程中,不同的天气条件、车况条件、道路车流状况、驾驶员驾驶经验甚至驾驶人当时的心情状况等主、客观条件都有可能会影响驾驶人在某一次驾驶过程中的驾驶速度,这些影响会反应在驾驶员的前驾驶行为中,同一驾驶员在同一节点的驾驶速度会根据客观条件、主观条件的不同而发生变化,而现有的统计模型分析驾驶人前驾驶行为并没有考虑实时性、针对性,进而产生预测误差。
8.因此亟需一种可以综合考虑不同驾驶人对实际道路环境反应的驾驶速度预测方法。
技术实现要素:
9.为解决上述现有技术中的缺陷,本发明公开了一种基于前驾驶行为的驾驶速度预测方法,包括如下步骤:
10.一种基于前驾驶行为的驾驶速度预测方法,包括如下步骤:
11.获取驾驶路径、驾驶路径的道路数据信息以及当前位置信息,所述驾驶路径配置有若干预测节点;
12.根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息;
13.根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度。
14.进一步的,根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息,包括根据驾驶路径的道路数据信息,提取预测节点的标识信息,根据标识信息构建视觉信息矩阵。
15.进一步的,所述标识信息包括:预测节点相对于驾驶人视点的距离、预测节点相对于驾驶人视点的高度差、预测节点相对于驾驶人视点方位角的夹角、预测节点对应的平曲线类型、预测节点对应的结构物类型、预测节点对应的横断面宽度、预测节点对应的设计速度、预测节点对应的道路等级和预测节点对应的道路类型中的一种或几种。
16.进一步的,根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度,包括:
17.获取或构建驾驶速度预测模型;
18.获取已行驶过预测节点的视觉信息、速度信息训练驾驶速度预测模型;
19.获取下一预测节点的视觉信息矩阵作为驾驶速度预测模型输入,输出驾驶速度预测值。
20.进一步的,所述驾驶速度预测模型是基于tensorf low框架搭建的lstm模型。
21.进一步的,所述获取已行驶过预测节点的视觉信息、速度信息训练驾驶速度预测模型包括:将已行驶过预测节点的视觉信息矩阵作为输入值,将速度信息中的驾驶速度作为输出值,训练驾驶速度预测模型。
22.进一步的,所述道路设计数据可以从道路设计说明、直线曲线转角表、纵坡竖曲线表、桥梁设计一览表或隧道设置一览表中获取。
23.进一步的,所述道路设计数据包括道路名称、道路等级、道路类型、道路长度、起点桩号、横断面宽度、设计速度数据、各预测节点的x坐标、y坐标、z坐标、平曲面类型和道路结构类型中的一种或几种。
24.进一步的,所述速度信息包括驾驶速度,还包括道路名称、桩号、驾驶员编号中的一种或几种。
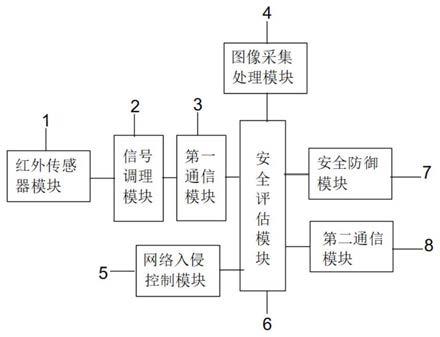
25.本发明还公开了一种基于前驾驶行为的驾驶速度预测系统,包括
26.信息采集模块,配置用于获取驾驶路径、驾驶路径的道路数据信息以及当前位置信息,所述驾驶路径配置有若干预测节点;
27.视觉信息计算模块,配置用于根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息;
28.预测模块,配置用于根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度。
29.通过上述技术方案,本发明的有益效果为:
30.本发明的各预测节点位于驾驶路径的不同位置,根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息,并实时获取前驾驶速度,充分考虑驾驶过程中主、客观条件对驾驶速度的影响,并将这种影响因素应用至预测下一预测节点对应的行驶速度,即充分考虑了驾驶过程中的实时性和动态性,模拟了驾驶人基于视野范围内的道路
交通环境,结合驾驶经验实时的调整行驶策略的过程,能够适应驾驶人驾驶过程中的空间连续性对驾驶速度的影响,使得驾驶速度预测结果更加准确,本方法还可针对单个驾驶人进行速度预测,能够反映不同驾驶人之间速度决策的差异性;
31.本发明的驾驶行为预测方法考虑了驾驶人的前驾驶行为,驾驶人行驶经验会影响驾驶行为,同时驾驶过程是一个典型的时序过程,具有时间上的连贯性,本发明通过将前驾驶行为与有效动态视野范围结合训练驾驶速度预测模型,使得驾驶速度预测方法能够体现前期驾驶行为对后续驾驶行为的影响;
32.本发明的选择lstm神经网络结构构建驾驶速度预测模型,其特点是上一次的输出会作为下一次的输入,即可以根据驾驶人过去对视角空间信息的速度反馈来推测对当前路段的速度决策。相较于传统道路安全评价使用的统计模型,本发明采用的速度预测方法精确性更高,对于互通交织区等横断面连续变化的路段具有更好的适应性;
33.综上所述,本发明能够将前驾驶行为和驾驶环境以数字化的形式体现并参与预测,将数字技术融入到了交通出行领域,构筑了全民畅享的数字生活,有利于推动交通出行的数字化。
附图说明
34.图1为本发明一种实施例的驾驶速度预测值和驾驶速度实际值对比曲线。
具体实施方式
35.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
36.本发明公开了一种基于前驾驶行为的驾驶速度预测方法,包括如下步骤:
37.获取驾驶路径、驾驶路径的道路数据信息以及当前位置信息,所述驾驶路径配置有若干预测节点;
38.根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息;
39.根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度。
40.其中,根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度,指的是本发明的预测过程是一个连续的过程,即根据驾驶人行驶过的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度,当驾驶人行驶过上述“下一预测节点”后,上述“下一预测节点”已经变成已行驶过的预测节点,再继续按照上述步骤进行下一预测节点的行驶速度预测,直至获取到的当前位置为最后一个预测节点,则结束速度预测过程。
41.本发明通过将驾驶路径划分为若干预测节点,各预测节点之间的距离可以根据需要进行设置,一般为了更好的预测,可以按照道路桩去设置预测节点,在实际驾驶过程中,驾驶人动态视野内的各预测节点的信息以及预测节点之间的信息,对驾驶人的速度有很大的影响,本发明通过将各预测节点的信息、预测节点之间的信息以及驾驶人自身的动态视
野进行综合考虑,同时,本发明的重大改进在于,不仅考虑到路况对驾驶速度的影响,还考虑到了驾驶人本人本次驾驶行为的前速度对后速度的影响,使得预测的结果更加符合驾驶人本人本次驾驶行为的最优速度,使得驾驶人本人在本次驾驶时根据该驾驶速度预测值进行调整时更加具有可参考性,同时也使得驾驶的过程更加安全。
42.综上,本发明的各预测节点位于驾驶路径的不同位置,根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息,并实时获取前驾驶速度,充分考虑驾驶过程中主、客观条件对驾驶速度的影响,即充分考虑了天气条件、车况条件、道路车流状况、驾驶员驾驶经验和驾驶人当时的心情状况等因素的影响,即并将这种影响因素应用至预测下一预测节点对应的行驶速度,充分考虑了驾驶过程中的实时性和动态性,模拟了驾驶人基于视野范围内的道路交通环境,结合驾驶经验实时的调整行驶策略的过程,能够适应驾驶人驾驶过程中的空间连续性对驾驶速度的影响,使得驾驶速度预测结果更加准确,本方法还可针对单个驾驶人进行速度预测,能够反映不同驾驶人之间速度决策的差异性;
43.下面对本发明的驾驶速度预测方法进行进一步的描述:
44.步骤一:获取驾驶路径、驾驶路径的道路数据信息以及当前位置信息,所述驾驶路径配置有若干预测节点;
45.驾驶路径即为预行驶的路程全程,为了便于获取道路设计中的各种数据信息,可以选用道路桩作为预测节点,下面将以道路桩为预测节点对道路数据信息的采集进行介绍;
46.道路数据信息主要通过查阅资料收集得到,具体可以从如下资料中收集:道路设计说明、直线曲线转角表、纵坡竖曲线表、桥梁设置一览表和隧道设置一览表等,上述说明和表格都是道路设计中通用的,本发明中不再赘述。
47.道路数据信息可以采用如下方法获取:
48.(1)根据道路设计说明获取驾驶路径的道路名称、道路等级、道路类型、道路长度、起点桩号、横断面宽度与设计速度数据;
49.其中,“道路等级”、“道路类型”设置为可选预设值,其他数据项为输入值。
[0050]“道路等级”可选高速公路、一级公路、二级公路、三级公路、四级公路、其他公路、快速路、主干路、次干路、支路、辅路、其他城市道路,对应预设值1~12;
[0051]“道路类型”可选主线、匝道,对应预设值1、2。
[0052]
将上述数据存入新建的道路数据信息表中。
[0053]
(2)根据直线曲线转角表获取驾驶路径的每条道路的每个桩号对应的x坐标、y坐标和平曲线类型;
[0054]
其中,“平曲线类型”设置为可选预设值,
[0055]“平曲线类型”可选直线、缓和曲线和圆曲线,对应预设值1~3;
[0056]
根据道路设计通用的直线曲线转角表中的“曲线主点位置”相关列可以提取出各个直线路段、圆曲线路段以及缓和曲线路段的起终点桩号、以及各路段起终点的平面坐标x、y,根据各路段的起终点桩号和坐标,结合不同曲线类型对应的曲线要素(表中“曲线要素表”相关列),即可得出道路平曲线上每个桩号对应的平面坐标及曲线类型,具体计算方法如下:
[0057]
①
对于直线路段:
[0058][0059][0060]
其中,k0、kn分别为直线路段起终点的桩号,x0、y0为桩号为k0位置处的平面坐标,xn、yn为桩号为kn位置处的平面坐标,xi、yi为k0与kn之间ki位置处的平面坐标,i∈(0,n)。
[0061]
②
对于圆曲线路段:
[0062]
xi=x0 c
×
cos(ai)
[0063]
yi=y0 c
×
sin(ai)
[0064][0065][0066]
其中,k0、ki分别为圆曲线路段起点、任意一点的桩号,x0、y0为桩号k0处的平面坐标,xi、yi为桩号ki的平面坐标,rc、dir对应表中该圆曲线路段的半径和方位角。
[0067]
③
对于缓和曲线路段:
[0068]
xi=x0 c
×
cos(ai)
[0069]
yi=y0 c
×
sin(ai)
[0070][0071][0072]
其中,k0、ki分别为缓和曲线路段起点、任意一点的桩号,x0、y0为桩号k0处的平面坐标,xi、yi为桩号ki的平面坐标,rc、ls、dir对应表中该缓和曲线路段的半径、缓和曲线长度和方位角。
[0073]
通过上述计算,得到每个桩号对应的x坐标、y坐标和平曲线类型,可以将计算获得的数据存入新建的平面坐标数据框,数据框包含四列数据:桩号、x坐标、y坐标、平曲线类型,数据按桩号顺序排列,每个桩号(1m)一条数据。
[0074]
(3)根据纵坡竖曲线表获取驾驶路径的每条道路上每个桩号对应的z坐标;
[0075]
根据道路设计通用的纵坡竖曲线表中的数据计算各个桩号对应的z坐标,选取“桩号k”、“标高z”、“纵坡i”三列数据。
[0076]
zi=z0 (k
i-k0)
×i[0077]
其中,k0、kn分别为纵坡竖曲线表中相邻两条数据的桩号,z0为桩号为k0位置处的高程,i为k0与kn之间纵坡坡度,zi为k0与kn之间ki位置处的高程,i∈(0,n)。
[0078]
将计算获得的数据存入新建的纵坐标数据框,数据框包含两列数据:桩号、z坐标,数据按桩号顺序排列,每个桩号(1m)一条数据。
[0079]
为了使得z坐标更加准确,可以选取纵坡竖曲线表中“凸曲线半径r”、“凹曲线半径r”、“起点桩号ks”、“终点桩号ke”四列数据,对纵坐标数据框的z坐标进行修正,修正算式如
下:
[0080][0081]
对于式中
±
,凹曲线取“ ”,凸曲线取
“‑”
,z_fix计算方法如下:
[0082][0083]
(4)根据桥梁设计一览表和隧道设置一览表获取驾驶路径的每条道路上每个桩号对应的道路结构类型,
[0084]“道路结构类型”可选桥梁、隧道和路基,对应预设值1~3。
[0085]
根据道路设计通用的桥梁设置一览表及隧道设置一览表中的“起讫桩号”可直接获取桥梁结构和隧道结构的起终点桩号。新建道路结构类型数据框,数据框包含两列数据:桩号、道路结构类型,每个桩号一条数据,根据获取的桥梁、隧道结构起终点桩号可以得出每个桩号位置对应的结构物类型,最终数据按桩号顺序排列。
[0086]
将步骤(2)~(4)得到的平面坐标数据框、纵坐标数据框和道路结构类型数据框以桩号为基准,合并为道路逐桩数据表,增加“道路名称”数据列后,将多条道路的道路逐桩数据汇总在同一张表中,形成道路逐桩标准数据集。
[0087]
将步骤(1)得到的道路数据信息表整合到道路逐桩标准数据集中,即根据道路信息数据表中的“道路名称”、“起点桩号”和“路段长度”信息,将同一道路的道路等级、道路类型、横断面宽度和设计速度信息按照桩号位置合并至道路逐桩标准数据集中。
[0088]
最终形成的道路逐桩标准数据集包括如下信息:
[0089]
道路名称、桩号、x坐标、y坐标、z坐标、平曲线类型、道路结构类型、道路等级、道路类型、横断面宽度和设计速度。
[0090]
步骤二:根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息;
[0091]
具体为根据驾驶路径的道路数据信息,提取预测节点的标识信息,根据标识信息构建视觉信息矩阵。
[0092]
其中,根据驾驶路径的道路数据信息,提取预测节点的标识信息,包括如下子步骤:
[0093]
(1)确定驾驶人有效动态视野范围n;
[0094]
(2)计算驾驶人视野范围内每个桩号相对于驾驶人视点的视觉信息,提取各个桩号(即预测节点)的标识信息。
[0095]
以驾驶人位于桩号ki为例,则驾驶人视野范围内任意点j(对应桩号k
i j
)的视觉信息包括:
[0096]
任意点j相对视点的距离len_j;
[0097]
任意点j相对视点的高差hight_j;
[0098]
任意点j相对视点方位角的夹角angle_j;
[0099]
任意点j对应的平曲线类型ali_j;
[0100]
任意点j对应的结构物类型str_j;
[0101]
任意点j对应的横断面宽度width_j;
[0102]
任意点j对应的限制速度spd_j;
[0103]
任意点j对应的道路等级rdclass_j;
[0104]
任意点j对应的道路类型rdtype_j;
[0105]
其中,
[0106][0107]
hight_j=z
i j-zi[0108]
angle_j=α
i j-αi[0109][0110][0111]
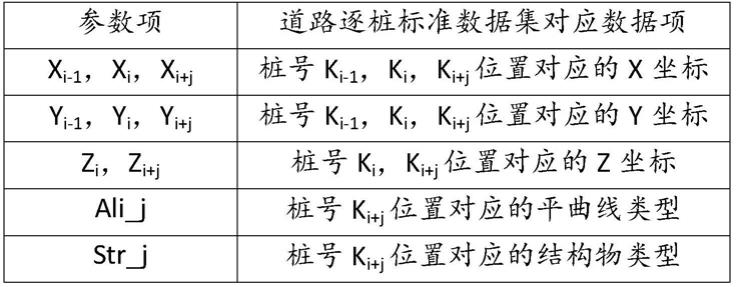
上述各参数均可在道路逐桩标准数据集中根据桩号位置获取:
[0112][0113][0114]
通过上述计算,驾驶人在桩号ki位置的标识信息为:
[0115]
[0116]
其中,1~n为驾驶人动态视野内的第1~n个道路桩。
[0117]
根据标识信息构建视觉信息矩阵的具体方法为:
[0118]
为了排除标识信息中各个参数之间由于单位不同、数值量级不同带来的影响,需要将标识信息进行数据归一化处理来构建视觉信息矩阵,即通过数据归一函数将各参数值统一处理到[0,1]值域范围内。
[0119]
各参数的数据归一函数如下:
[0120][0121][0122][0123][0124][0125][0126][0127][0128][0129]
通过考虑驾驶人在不同桩号处的有效动态视野,充分考虑了驾驶过程中的实时性和动态性,模拟了驾驶人基于视野范围内的道路交通环境,结合驾驶经验实时的调整行驶策略的过程,能够适应驾驶人驾驶过程中的空间连续性对驾驶速度的影响,使得驾驶速度预测结果更加准确。
[0130]
步骤三:根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度,
[0131]
具体包括:
[0132]
(1)获取或构建驾驶速度预测模型;驾驶速度预测模型优先选用基于tensorflow框架搭建的lstm模型,
[0133]
(2)获取已行驶过预测节点的视觉信息、速度信息训练驾驶速度预测模型;
[0134]
(3)获取下一预测节点的视觉信息矩阵作为驾驶速度预测模型输入,输出驾驶速度预测值。
[0135]
其中,步骤(2)还包括如下子步骤:
[0136]
将已行驶过预测节点的视觉信息矩阵作为输入值,将速度信息中的驾驶速度作为输出值,训练驾驶速度预测模型。
[0137]
其中,此处的速度信息指的是驾驶人在已行驶过的预测节点的各种驾驶信息,具体包括桩号、驾驶速度、道路名称和驾驶员编号等信息。驾驶速度指的是驾驶人的实际驾驶速度,采集驾驶速度的目的是为了采集历史速度进行模型训练;采集桩号、道路名称的目的是为了将历史速度与某道路上某道路桩的视觉信息矩阵进行对应,采集驾驶员编号的目的是将区分驾驶员之间的驾驶行为。
[0138]
采用已行驶预测节点的视觉信息矩阵和驾驶速度构建训练集,采用训练集对驾驶速度预测模型进行训练,将已行驶的预测节点的视觉信息矩阵中的相关数据作为输入值(即len_j、hight_j、angle_j、ali_j、str_j、width_j、spd_j、rdclass_j、rdtype_j,j取值[1,200],假设驾驶人的有效视野范围为200米),将驾驶速度作为输出值,利用tensorflow框架搭建lstm网络结构进行模型训练。
[0139]
在驾驶人的实际驾驶过程中,从驾驶起点开始,先行驶一小段路程以采集一小段的驾驶行为数据用于去构建训练集,再采用训练集去训练驾驶速度预测模型,然后将与驾驶人的下一道路桩的视觉信息矩阵输入训练后的驾驶速度预测模型中,输出驾驶速度预测值,可以根据驾驶速度预测值,对驾驶速度进行调整,以提前辨识道路设计中存在的安全风险,减少道路事故发生、提高道路交通安全水平。
[0140]
步骤三是一个持续的预测过程,随着驾驶时间的延长,已行驶过的预测节点越来越多,采集到的速度信息越来越多,驾驶速度预测模型中训练集的数据也越来越多,当训练集中的数据越多时,训练后的驾驶速度预测模型的预测结果越准确,由于本发明在驾驶人驾驶过每一个道路桩后,都将相应的数据输入训练集进行训练,所以随着驾驶路径的增加,本发明的预测结果会越来越精确。
[0141]
本发明的驾驶行为预测方法充分考虑了驾驶人的前驾驶行为,驾驶过程是一个典型的时序过程,驾驶人在前面的行驶经验会影响驾驶人在后面的驾驶行为,本发明通过将前驾驶行为与有效动态视野范围结合训练驾驶速度预测模型,使得驾驶速度预测方法能够体现前期驾驶行为对后续驾驶行为的影响;且本发明选择lstm神经网络结构构建驾驶速度预测模型,可以根据驾驶人过去对视角空间信息的速度反馈来推测对当前路段的速度决策,随着行驶路径的增加,用于训练的数据越来越多,结果越来越准确。相较于传统道路安全评价使用的统计模型,本发明采用的速度预测方法精确性更高,对于互通交织区等横断面连续变化的路段具有更好的适应性。
[0142]
本发明还公开了一种基于前驾驶行为的驾驶速度预测系统,包括,
[0143]
信息采集模块,配置用于获取驾驶路径、驾驶路径的道路数据信息以及当前位置信息,所述驾驶路径配置有若干预测节点;
[0144]
视觉信息计算模块,配置用于根据道路数据信息和驾驶人动态视野计算驾驶人在各预测节点的视觉信息;
[0145]
预测模块,配置用于根据已行驶过预测节点的速度信息、视觉信息以及下一预测节点的视觉信息预测下一预测节点对应的行驶速度。
[0146]
实施例1
[0147]
为了验证本发明的驾驶行为预测方法的准确性,本发明采集了一组某驾驶人在高速公路主线驶出进入匝道的行驶过程中的驾驶行为数据进行验证;
[0148]
采用步骤一和步骤二的方法构建该驾驶路径所对应的各道路桩的视觉信息矩阵;
[0149]
将各道路桩的视觉信息矩阵和驾驶行为数据合并后(即将驾驶速度与道路桩对应),设置划分比例b:(1-b),根据划分比例按桩号划分为两个数据集,其中桩号前b%的数据集为训练集,其余(1-b)%的数据集为测试集。
[0150]
在训练集中,将视觉信息矩阵作为输入值(即len_j、hight_j、angle_j、ali_j、str_j、width_j、spd_j、rdclass_j、rdtype_j,j取值[1,200],本实验中驾驶人的有效视野范围为200米),将行驶速度数据列作为输出值,利用tensorflow框架搭建lstm网络结构进行模型训练。
[0151]
在测试集中,按照桩号顺序,依次选取各个桩号对应的视觉信息矩阵,将视觉信息矩阵输入训练完成的lstm模型中,得到该桩号对应的驾驶速度预测值。其中,预测完一个桩号的驾驶速度后,将该桩号的驾驶速度实际值(即采集到的实际驾驶速度值)输入训练集中,进一步训练模型后,再输入下一个桩号的视觉信息矩阵,得出下一个桩号的驾驶速度预测值。
[0152]
将驾驶速度预测值与驾驶行为数据中的驾驶速度实际值进行比对,结果如图1所示,图1中线段a为驾驶速度预测值,线段b为驾驶速度实际值。图1的数据显示利用本方法得到的高速公路主线行驶速度与实际值误差在10km/h之内,匝道上的行驶速度误差小于5km/h,行驶速度预测方法的预测精度达到90%-95%,而且能够很好的预测行驶速度的峰值点。
[0153]
以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。