1.本发明涉及农用机械技术领域,具体是四驱微耕机。
背景技术:
2.在目前的农用机械中,常常采用微耕机对土地进行开沟、培土和旋耕等工作,因不同方式不同对刀具的旋向和速度要求不同,比如开沟和旋耕时刀具旋向就不相同,且开沟和旋耕时要求的刀具转速也不相同,导致现有农业作业中将微耕机还细分到用于开沟培土工作的微耕机和用于旋耕的微耕机,这无疑增加了进行农业作业的设备成本,且在同一天既需要进行旋耕又需要在旋耕后进行开沟培土时,操作者不得不耗费时间和人力将两个设备在存放地和作业地之间转移,提高了设备的使用成本,同时降低了劳动生产效率。
3.现有的微耕机中,为提高设备的适用性,使得设备适应不同的作业要求,大多微耕机的变速器均具备行走轮的档位调节和刀具的档位调节功能,但也因这些档位调节的存在,使得整个变速器的传动结构复杂,轴类零件和齿轮类零件均多,造成传动结构占用尺寸大,变速器的箱体尺寸也因此变大,不利于带有该变速器的微耕机的小型化和轻量化。
4.此外,现有微耕机中,箱体包括变速器箱体和下行走箱箱体,变速器箱体用于容纳离合器和变速器的传动结构,而下行走箱内设有竖向的传动轴和水平的行走轴,行走轴用于带动行走轮转动,传动轴用于将变速器传动结构的动力传递给行走轴,因下行走箱的存在,使得整个微耕机的高度较大,对于枝叶距离地面较矮的农作物,因农作物叶子与地面之间(也称农作物下方)空间高度有限而无法进行机械自动化的农业作业。
技术实现要素:
5.本发明意在提供四驱微耕机,以解决现有技术中微耕机只存在一个方向的转速而带来的微耕机种类多、设备成本高且同日进行不同农业作业存在的生产效率低的问题。
6.为了达到上述目的,本发明的基础方案如下:
7.四驱微耕机,包括机架、驱动器、变速器、行走轮和刀具,驱动器用于为变速器提供动力,驱动器和变速器均固定在机架上,变速器包括箱体和转动连接在箱体上的主轴、行走输出轴和刀具输出轴,行走输出轴带动行走轮转动,刀具输出轴带动刀具旋转,主轴上轴向滑动连接有换挡齿轮,箱体上转动连接有过渡齿轮组,过渡齿轮组包括固定连接的过渡齿轮一和过渡齿轮二,刀具输出轴上固定连接有固定齿轮,固定齿轮与过渡齿轮一常啮合,换挡齿轮能够与固定齿轮或过渡齿轮二啮合。
8.相比于现有技术的有益效果:
9.采用本方案时,通过在刀具输出轴和主轴的传动之间设置换挡齿轮和过渡齿轮组,使得刀具输出轴具有三种状态,其中一种状态为换挡齿轮不与任何齿轮啮合,此时刀具输出轴的状态为空转;在换挡齿轮与固定齿轮啮合后,主轴动力直接传递给刀具输出轴,而使得刀具输出轴带动刀具输出一种动力;而当换挡齿轮与过渡齿轮二啮合后,动力经换挡齿轮传递给过渡齿轮组,再由过渡齿轮组中的过渡齿轮一将动力传递给刀具输出轴,进而
使得刀具输出轴带动的刀具的转动方向发生变化,同时通过过渡齿轮组的介入,也使得刀具输出轴带动的刀具的转速也发生变化,进而满足在同一个微耕机上实现不同要求的农业作业,进而实现了微耕机的功能多样性,降低了设备成本,同时也避免了在同一天进行旋耕和开沟培土时存在的需要转移两个设备的情况,进而有利于提高工作效率。
10.此外,本方案中,通过过渡齿轮组的设置,使得刀具在不同状态下的转速也发生了变化,进一步满足实际使用需求,如开沟培土时需要更高的转速,而旋耕时则需要较低的转速且要求旋耕与开沟时的刀具旋向发生变化。
11.进一步,所述主轴和行走输出轴之间通过设有的传动齿轮组实现动力传递,传动齿轮组包括主齿轮和传动组,主齿轮固定连接在主轴上,传动组用于将主轴上主齿轮的动力传递到副齿轮上,传动组包括空套在刀具输出轴上的传递齿轮以及连接在行走输出轴上的副齿轮,传递齿轮能够与副齿轮啮合,传递齿轮能够与主齿轮啮合。
12.有益效果:采用本方案时,通过传动组的传递齿轮和副齿轮,使得动力能够经传递齿轮进行传递,同时本方案时,传递齿轮空套在刀具输出轴上,将刀具输出轴进行了合理利用,相比另设转动轴的情况,本方案能够使得变速器内的结构更加紧凑,进而降低变速器的整体尺寸,进而有利于微耕机的变速器的小型化和轻量化。
13.除此在外,本方案也能够通过主齿轮、传递齿轮和副齿轮的设置,实现至少两级减速,保证行走输出轴在经过减速后输出动力,有利于提高实用性。
14.进一步,所述传递齿轮包括空套在刀具输出轴上的传递齿轮一和传递齿轮二,副齿轮包括副齿轮一和副齿轮二,副齿轮一空套在行走输出轴上,副齿轮二与行走输出轴同步转动,传递齿轮一、传递齿轮二和副齿轮一均包括固定连接的大齿轮和小齿轮,传递齿轮一的大齿轮与主齿轮啮合,传递齿轮一的小齿轮与副齿轮一的大齿轮啮合,副齿轮一的小齿轮与传递齿轮二的大齿轮啮合,传递齿轮二的小齿轮能够与副齿轮二啮合。
15.有益效果:采用本方案时,每一次小齿轮与大齿轮的啮合都是一次减速,本方案中,通过主轴、刀具输出轴和行走输出轴的设置,使得主齿轮、传递齿轮一、传递齿轮二、副齿轮一和副齿轮二之间形成了四级减速,进而极大降低了变速器的行走输出轴的输出转速,进而使得微耕机的行走速度更适合实际农业作业。
16.进一步,所述传递齿轮一的大齿轮和传递齿轮二的大齿轮位于传递齿轮的中部,而传递齿轮一的小齿轮和传递齿轮二的小齿轮位于传递齿轮的两侧,副齿轮一的大齿轮与小齿轮之间形成让位空间,让位空间用于避空传递齿轮一的大齿轮。
17.有益效果:采用本方案时,传递齿轮的大齿轮位于中间而小齿轮位于两侧,利用让位空间为其中一个传递齿轮的大齿轮进行让位,进而使得变速器的空间布局更加紧凑,进一步有利于变速器的小型化,促进微耕机的变速器的轻量化,进而促进微耕机的轻量化和小型化。
18.进一步,所述副齿轮二轴向滑动连接在行走输出轴上,还包括转动连接在箱体上的倒挡齿轮,传递齿轮二还设有与倒挡齿轮啮合的配合齿轮,副齿轮二还能与倒挡齿轮啮合。
19.有益效果:采用本方案时,通过倒挡齿轮和轴向移动的副齿轮二的设置,使得在需要改变行走输出轴的转向时,滑动副齿轮二,使得副齿轮二与倒挡齿轮啮合,进而动力从主轴依次经过主齿轮、传递齿轮一、副齿轮一、传递齿轮二、倒挡齿轮最后传递到与行走输出
轴同步转动的副齿轮二上,实现行走输出轴的方向转变,可以称为倒档;而在需要行走轮正向前进时,先将副齿轮二轴向滑动,使得副齿轮二不与任何一个齿轮啮合,副齿轮二和行走输出轴形成空档,然后继续推动副齿轮二轴向滑动,使得副齿轮二与传递齿轮二的小齿轮啮合,实现副齿轮二和行走输出轴的正转,也即实现行走轮的前进;本方案使得行走轮具备不同档位,提高微耕机的实用性。
20.进一步,所述倒挡齿轮和过渡齿轮位于传递齿轮的两侧。
21.有益效果:采用本方案时,因传递齿轮包括传递齿轮一和传递齿轮二,传递齿轮一和传递齿轮二均包括大齿轮和小齿轮,将大齿轮放在中间而小齿轮放在两边,使得刀具输出轴远离两个大齿轮的两端位置上空间较大,进而将该两端空间较大的位置进行倒挡齿轮和过渡齿轮的设置,进一步提高了变速器中零件布局的紧凑性,有利于变速器的小型化。
22.进一步,所述箱体内设有变速腔和行走腔,主轴、行走输出轴和刀具输出轴均位于变速腔内,行走腔的腔壁上转动连接有行走轴,行走轴上固定连接着行走轮;行走轴与行走输出轴之间设有传动齿轮,传动齿轮位于行走腔内。
23.有益效果:采用本方案时,主轴、行走输出轴和刀具输出轴均位于变速腔内,完成了变速器的变速结构的安装,而固定连接行走轮的行走轴直接转动在行走腔的腔壁上,同时通过对箱体的设计和行走轴与行走输出轴的传动齿轮连接设计,使得在一个箱体上既完成了变速器的传动结构的安装又完成了行走轴的安装,一方面,本方案省去了现有技术中的下行走箱,极大降低了箱体的成本,并实现箱体的小型化和轻量化;另一方面,也因为下行走箱的取消,使得整个微耕机的高度得以极大降低,进而方便本方案的微耕机直接在枝叶距离地面较矮的农作物下方空间进行机械自动化作业,解决了现有技术中的难题,有利于提高农业作业效率。
24.进一步,所述箱体内还包括离合腔,行走腔和离合腔位于变速腔的同侧,驱动器与主轴之间连接有离合器,离合器位于离合腔内。
25.有益效果:采用本方案时,通过将离合腔和行走腔设置在变速腔同侧,以使得箱体内用于安装离合器的离合腔下方空间得以利用,使得变速器的结构布置地更加紧凑,有利于提高变速器的小型化和轻量化。
26.进一步,所述离合腔和行走腔连通。
27.有益效果:采用本方案时,一方面,离合腔与行走腔的连通设置,使得用于行走轴与行走输出轴之间动力传递的传动齿轮能够有更广的安装空间;另一方面,也通过箱体内腔室之间的两两互相连通,使得只需要在一个腔室内注入润滑油,再在相邻腔室之间的连接板上开设过油孔,则润滑油就能自行流入到其余腔室中,方便了对箱体内不同腔室的润滑。
28.进一步,所述刀具包括刀轴和刀片,刀轴转动连接在机架上,刀具输出轴带动刀轴旋转,刀片固定连接在刀轴上,刀片包括刀柄和弯曲的刀身,刀身相对于刀柄所在平面弯曲,刀身上设有刀刃,刀刃向弯曲的刀身内侧扭转。
29.有益效果:采用本方案时,将刀身相对于刀柄所在平面弯曲后,再将刀刃向弯曲的刀身内侧扭转,使得刀刃在空间上具有空间曲线,也即使得刀刃的刃口线形成空间曲线,以适应刀片切土时的受力特征,从而减小刀片切入土壤时所承受的土壤阻力,减小刀片的损耗,有利于提高旋耕刀的使用寿命。此外,刀刃向弯曲的刀身内侧扭转,则在刀片的切土过
程中,刀刃先行切入土中后,刀身非刀刃的部分在入土时会对微耕机行进方向未切割的土壤形成挤压力,以实现对未切割土壤的预松土,使得微耕刀片的后续切土作业更省力,进一步降低了切土功耗。
附图说明
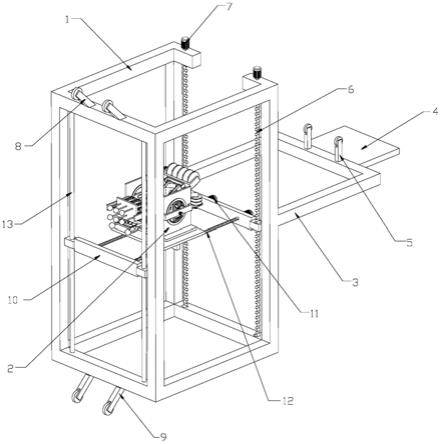
30.图1为本发明实施例的前视图;
31.图2为本发明实施例变速器和刀具连接后的三维结构示意图;
32.图3为图2的俯视图;
33.图4为图2的主视剖视图;
34.图5为本发明实施例中去掉箱体后的变速器传动结构的三维结构示意图;
35.图6为本发明实施例中去掉箱体后的变速器传动结构在另一角度下的三维结构示意图;
36.图7为图5的前视图;
37.图8为图7中的a向示意图;
38.图9为发明实施例的刀具中刀片的在其中一个视角下的结构示意图;
39.图10为发明实施例的刀具中刀片的在另一个视角下的结构示意图。
具体实施方式
40.下面通过具体实施方式进一步详细说明:
41.说明书附图中的附图标记包括:机架100、变速器200、驱动器300、行走轮400、刀具500、离合器600、主轴1、换挡齿轮11、主齿轮12、行走输出轴2、副齿轮一21、副齿轮二22、刀具输出轴3、固定齿轮31、传递齿轮一32、传递齿轮二33、配合齿轮34、中间轴4、过渡齿轮一41、过渡齿轮二42、倒挡轴5、倒挡齿轮51、行走轴6、第一锥齿轮组61、箱体10、离合腔20、变速腔30、行走腔60、传递轴700、刀轴7、刀片8、刀柄81、刀身82、刀刃821。
42.实施例
43.实施例基本如附图1至图10所示,结合图1至图4,四驱微耕机,包括机架100、驱动器300、变速器200、行走轮400和刀具500,驱动器300和变速器200固定安装在机架100上,驱动器300用于为变速器200提供动力,本实施例中驱动器300可以采用发动机。
44.结合图5至图8,变速器200包括箱体10和转动连接在箱体10上的主轴1、行走输出轴2、刀具输出轴3、中间轴4和倒挡轴5,驱动器300与主轴1之间连接有离合器600,行走输出轴2带动行走轮400转动,刀具输出轴3带动刀具500旋转;箱体10内一体成型有两两互相连通的离合腔20、变速腔30和行走腔60,离合腔20和行走腔60位于变速腔30的同侧,离合腔20用于容纳离合器600,变速腔30用于容纳主轴1、行走输出轴2、刀具输出轴3、中间轴4和倒挡轴5。
45.具体地,主轴1上轴向滑动连接有换挡齿轮11,刀具输出轴3上固定连接有固定齿轮31,中间轴4上空套有过渡齿轮组,过渡齿轮组包括一体成型的过渡齿轮一41和过渡齿轮二42,固定齿轮31与过渡齿轮一41常啮合,换挡齿轮11能够与固定齿轮31或过渡齿轮二42啮合。
46.主轴1与行走输出轴2之间通过设有的传动齿轮组实现动力传递,传动齿轮组包括
主齿轮12和传动组,主齿轮12固定连接在主轴1上,传动组用于将主轴1上主齿轮12的动力传递到副齿轮上,传动组包括空套在刀具输出轴3上的传递齿轮以及连接在行走输出轴2上的副齿轮,传递齿轮包括空套在刀具输出轴3上的传递齿轮一32和传递齿轮二33,副齿轮包括副齿轮一21和副齿轮二22,副齿轮一21空套在行走输出轴2上,副齿轮二22轴向滑动连接在行走输出轴2上,传递齿轮一32、传递齿轮二33和副齿轮一21均包括一体成型的大齿轮和小齿轮,传递齿轮一32的大齿轮与主齿轮12啮合,传递齿轮一32的小齿轮与副齿轮一21的大齿轮啮合,副齿轮一21的小齿轮与传递齿轮二33的大齿轮啮合,传递齿轮二33的小齿轮能够与副齿轮二22啮合。
47.传递齿轮一32的大齿轮和传递齿轮二33的大齿轮位于传递齿轮的中部,而传递齿轮一32的小齿轮和传递齿轮二33的小齿轮位于传递齿轮的两侧,副齿轮一21的大齿轮与小齿轮之间形成让位空间,让位空间用于避空传递齿轮一32的大齿轮。
48.倒挡轴5上空套有倒挡齿轮51,传递齿轮二33还设有与倒挡齿轮51啮合的配合齿轮34,配合齿轮34与传递齿轮二33上的大齿轮、小齿轮一体成型,副齿轮二22还能与倒挡齿轮51啮合。
49.倒挡齿轮51和过渡齿轮位于传递齿轮的两侧。
50.行走腔60的腔壁上转动连接有行走轴6,行走轴6与行走输出轴2之间设有传动齿轮,该传动齿轮采用第一锥齿轮组61,第一锥齿轮组61位于主轴1下方,第一锥齿轮组61位于行走腔60内,行走轴6与第一锥齿轮组61中的一个锥齿轮同步转动。
51.换挡齿轮11和副齿轮二22的轴向移动可以通过箱体10上安装有的拨叉的推动来完成。
52.结合图2、图3、图9和图10,刀具500包括刀轴7和刀片8,刀轴7转动连接在机架100上,刀具输出轴3与刀轴7之间连接有传递轴700,传递轴700的输入端与刀具输出轴3的输出端固定连接(具体可以是传递轴700与刀具输出轴3通过同轴器固定连接),传递轴700的输出端与刀轴7之间通过第二锥齿轮组传动连接,刀片8固定连接在刀轴7上,刀片8包括一体成型的刀柄81和弯曲的刀身82,刀身82相对于刀柄81所在平面弯曲,刀身82上一体成型有刀刃821,刀刃821向弯曲的刀身82内侧扭转,本实施例的刀片8设计,使得刀具500在切土过程中更加省力,有利于延长刀具500的使用寿命。
53.具体实施过程如下:
54.采用本实施例时,因传动齿轮组的传递齿轮一32和传递齿轮二33均空套在刀具输出轴3上,使得刀具输出轴3与行走输出轴2之间的转速互不影响,从而便于对刀具输出轴3带动的刀具500和行走输出轴2带动的行走轮400进行分开单独控制。
55.本变速器200能够实现刀具500的高档、低档和空档,也能实现行走轮400的前进档、倒挡和空档,具体不同档位如下:
56.刀具500的高档:通过拨叉使得换挡齿轮11直接与刀具输出轴3上固定连接的固定齿轮31啮合,则主轴1的动力直接通过换挡齿轮11和固定齿轮31传递到刀具输出轴3上,刀具输出轴3通过传递轴700将动力传递给刀具500的刀轴7,进而使得固定在刀轴7上的刀片8转动,该过程中,仅仅经过一次减速,刀具500的刀片8转速依然较高,本实施例称之为高档,刀具500在高档位状态下可以进行开沟、培土等工作。
57.刀具500的空档:通过拨叉的推动,使得换挡齿轮11不与任何齿轮啮合,则刀具输
出轴3上没有动力传递,实现刀具输出轴3的空档,以便于在微耕机进行转移时,只需要行走轮400启动,进而避免因刀具输出轴3带动刀具500转动而对操作人员安全构成威胁的情况。
58.刀具500的低档:通过拨叉继续推移换挡齿轮11,使得换挡齿轮11移动到与过渡齿轮二42啮合,进而使得主轴1的动力经过换挡齿轮11传递到过渡齿轮二42上,再由过渡齿轮一41将动力传递给固定齿轮31,固定齿轮31转动则刀具输出轴3转动,进而使得刀具500转动,该过程中,因一体成型的过渡齿轮一41和过渡齿轮二42的引入,使得该过程经历了两级减速,刀具输出轴3的转速相对更低,同时刀具输出轴3的旋向也发生变化,该档位因刀具输出轴3输出的转速更低,使得刀具500转速也更低故而称之为抵挡,在该档位状态下,微耕机可以进行旋耕工作。
59.由刀具500的输出结果可以知晓,本实施例在同一个微耕机上能够实现不同要求的农业作业,进而实现了微耕机的功能多样性,降低了设备成本,同时也避免了在同一天进行旋耕和开沟培土时存在的需要转移两个设备的情况,进而有利于提高工作效率。此外,本实施例中,通过过渡齿轮组的设置,使得刀具500在不同状态下的转速也发生了变化,进一步满足实际使用需求,如开沟培土时需要更高的转速,而旋耕时则需要较低的转速且要求旋耕与开沟时的刀具500旋向发生变化。
60.行走轮400的前进档:通过拨叉推动副齿轮二22移动,以使得副齿轮二22与传递齿轮二33的小齿轮啮合,则主轴1上的动力依次经主齿轮12、传递齿轮一32、副齿轮一21、传递齿轮二33最终传递给副齿轮二22,在该过程中每一次动力传递都是一次减速,进而在主轴1将动力传递到行走输出轴2的过程中经过了四级减速,极大降低了行走输出轴2的输出转速,行走输出轴2将动力传递给行走轴6,进而使得带有行走轮400的行走轴6的转速降低,使得微耕机的行走轮400行走速度更适合实际农业作业。
61.行走轮400的空档:当需要行走轮400处于空档时,则需要行走输出轴2没有动力,此时通过拨叉推动副齿轮二22移动到不与任何齿轮啮合即可。
62.行走轮400的倒档:通过拨叉推动副齿轮二22移动到与倒挡齿轮51啮合,进而动力从主轴1依次经过主齿轮12、传递齿轮一32、副齿轮一21、传递齿轮二33、倒挡齿轮51最后传递到与行走输出轴2同步转动的副齿轮二22上,实现行走输出轴2的方向转变,行走输出轴2的方向转变后,通过第一锥齿轮组61带动行走轴6的方向也随之转变,行走轴6上带有的行走轮400实现反转,也即实现行走轮400的倒档。
63.本实施例中,传递齿轮的大齿轮位于中间而小齿轮位于两侧,使得刀具输出轴3远离两个大齿轮的两端位置上空间较大,进而将该两端空间较大的位置进行倒挡齿轮51和过渡齿轮的设置,此外,副齿轮一21的大齿轮与小齿轮之间形成的让位空间能够为其中一个传递齿轮的大齿轮进行让位,使得整个变速器200的传动结构的空间布局更加紧凑,有利于变速器200的小型化,促进微耕机的轻量化。
64.此外,采用本实施例时,通过将主轴1下方空间进行利用,使得水平设置的行走轴6能够直接与第一锥齿轮组61中的一个锥齿轮同轴转动,进而使得行走轴6能够与微耕机的其他轴均放置在一个箱壳内,极大缩小了整个微耕机箱体10的占地面积,且行走轴6水平设置使得行走轴6上可以直接安装行走轮400,相比于现有技术中的微耕机既包括变速器箱体又包括用于安装传动轴和行走轴6的下行走箱的情况,本实施例能够省去微耕机的下行走箱,进而进一步提高了微耕机的小型化和轻量化。
65.此外,本实施例中,通过变速器200传动结构、离合器600和行走轴6在箱体10上不同腔室的设置,使得在一个箱体10上既完成了变速器200传动机构的安装又完成了行走轴6的安装,一方面,本实施例省去了现有技术中的下行走箱,极大降低了箱体10的成本,并实现箱体10的小型化和轻量化;另一方面,也因为下行走箱的取消,使得整个微耕机的高度得以极大降低,进而方便本方案的微耕机直接在枝叶距离地面较矮的农作物下方空间进行机械自动化作业,解决了现有技术中的难题,有利于提高农业作业效率。
66.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。