1.本发明涉及大气污染防治与预测技术领域,具体而言,涉及基于多粒度图时空神经网络的污染物浓度预测方法及装置。
背景技术:
2.为了预测空气中各种污染物的浓度,相关技术中有多种建模方法,包括机理模型方法、统计方法和机器学习方法等。机理模型方法也称为数值模型,专注于大气物理和化学反应对空气污染物的排放、扩散过程建模。如,第三代空气质量模型cmaq(community multiscale air quality,第三代空气质量预报和评估装置的模式)和camx(comprehensive air quality model with extensions,第三代三维空气质量模型)等。基于第三代空气质量模型的污染物浓度预测方法需要有全面准确的源清单和气象场数据作为输入,才能进行预测,其应用受限。随着深度学习的兴起,基于机器学习的空气质量预测方法受到越来越多的关注。基于机器学习的空气质量预测方法利用大量历史观测数据进行训练学习,找出污染物浓度变化规律,从而进行空气质量预测。但现有的基于深度学习的机器学习方法并没有充分利用历史数据的时间与空间关系,导致效果并不是很好。
技术实现要素:
3.本发明旨在解决或改善上述技术问题的至少之一。
4.为此,本发明的第一目的在于提供一种基于多粒度图时空神经网络的污染物浓度预测方法。
5.本发明的第二目的在于提供一种基于多粒度图时空神经网络的污染物浓度预测装置。
6.本发明的第三目的在于提供一种可读存储介质。
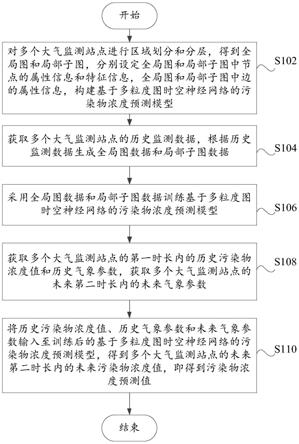
7.为实现本发明的第一目的,本发明的技术方案提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,包括:对多个大气监测站点进行区域划分和分层,得到全局图和局部子图,分别设定全局图和局部子图中节点的属性信息和特征信息,全局图和局部子图中边的属性信息,构建基于多粒度图时空神经网络的污染物浓度预测模型;获取多个大气监测站点的历史监测数据,根据历史监测数据生成全局图数据和局部子图数据;采用全局图数据和局部子图数据训练基于多粒度图时空神经网络的污染物浓度预测模型;获取多个大气监测站点的第一时长内的历史污染物浓度值和历史气象参数,获取多个大气监测站点的未来第二时长内的未来气象参数;将历史污染物浓度值、历史气象参数和未来气象参数输入至训练后的基于多粒度图时空神经网络的污染物浓度预测模型,得到多个大气监测站点的未来第二时长内的未来污染物浓度值,即得到污染物浓度预测值。
8.本技术方案中的基于多粒度图时空神经网络的污染物浓度预测模型,充分利用大气监测站点之间的动态空间关系进行大气监测站点污染物浓度预测,提高污染物浓度预测值的准确度。
9.上述任一技术方案中,对多个大气监测站点进行区域划分和分层,得到全局图和局部子图,具体包括:获取多个大气监测站点的经纬度,根据经纬度对多个大气监测站点进行聚类,得到多个区域,将区域设为全局节点,将区域内的大气监测站点设为局部节点,得到全局图和局部子图。
10.本技术方案中,根据大气监测站点的经纬度,对大气监测站点进行聚类,实现嵌套的全局图和局部子图时空神经网络,充分利用图的拓扑性质处理时空数据,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
11.上述任一技术方案中,分别设定全局图和局部子图中节点的属性信息和特征信息,全局图和局部子图中边的属性信息,具体包括:设定全局节点的属性信息,包括区域污染物浓度值,全局节点的特征信息包括区域气象参数和区域时间特征;设定局部节点的属性信息,包括大气监测站点的局部污染物浓度值,局部节点的特征信息包括大气监测站点的局部气象参数、土地利用类型数据和局部时间特征;在两个全局节点之间的地理距离小于等于第一阀值的情况下,在两个全局节点之间建立一条边,设定两个全局节点之间边的属性信息,包括两个全局节点之间的相似度,两个全局节点之间的相似度包括地理位置相似度、风向相似度和平流系数;在任意两个局部节点之间建立一条边,设定两个局部节点之间边的属性信息,包括两个局部节点之间的相似度,两个局部节点之间的相似度包括地理位置相似度和风向相似度。
12.本技术方案中,在对大气监测站点进行分析后,充分利用大气监测站点污染物浓度之间的空间关系和地形关系,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
13.上述任一技术方案中,构建基于多粒度图时空神经网络的污染物浓度预测模型,具体包括:采用编解码结构,在编码结构中,构建全局级和局部级两种粒度图结构,全局图和局部子图之间通过消息传递机制进行交互,局部节点将属性信息向上传递至全局节点,全局节点将属性信息向下更新至局部节点,在每个时间段中,计算每个全局节点的属性信息,并更新对应的局部节点的属性信息,通过一轮信息传递过程后,生成局部节点属性信息的时间序列,时间序列输入至第一长短期记忆人工神经网络进行编码,第一长短期记忆人工神经网络的最终状态输入至解码结构中;在解码结构中,第一长短期记忆人工神经网络的最终状态输入至第二长短期记忆人工神经网络,局部节点的未来气象参数与第一全连接层输出的污染物浓度预测值进行拼接后,输入至第二长短期记忆人工神经网络,第二长短期记忆人工神经网络进行解码,将第二长短期记忆人工神经网络的最后结果输入至第一全连接层,第一全连接层输出污染物浓度预测值。
14.本技术方案中,多粒度图时空神经网络为核心结构,通过构建两种粒度,有效提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
15.上述任一技术方案中,全局图和局部子图之间通过消息传递机制进行交互,具体包括:
16.消息传递机制主要包括消息聚合和表示更新,消息聚合为:
17.ra={(xs,xa,e
a,s
)}
s∈ν(a)
;
18.ra←
ψ(ra);
19.其中,ra表示全局图中全局节点a的所有消息集合,xa表示全局图中全局节点a的属
性信息,xs表示全局图中全局节点a的邻近节点属性信息,e
a,s
表示全局图边属性信息,ν(a)表示全局图中全局节点a的邻接节点集,ra表示全局图中全局节点a的聚合向量,ψ(
·
)表示聚合函数;
20.表示更新为:
[0021][0022]
其中,表示第一更新函数,表示第二更新函数,r
a,i
表示第a个局部子图中第i个局部节点的聚合向量,x
a,i
表示第a个局部子图中第i个局部节点的属性信息,x'a表示更新后的全局图中全局节点a的属性信息,ra表示全局图中全局节点a的聚合向量,x'
a,i
表示更新后第a个局部子图中第i个局部节点的属性信息,ua表示全局图中节点a的属性向量,采用不同全连接层实现;
[0023]
表示更新的方式为利用全局图更新局部子图,从全局图传递的信息包括区域污染物浓度值,在每一个时间段,全局图的输出输入至第二全连接层,第二全连接层得到向下更新向量,利用向下更新向量对局部子图对应的全局属性信息进行更新,局部子图对应的全局属性信息包括气象参数和向下更新向量,全局属性信息使用消息传递方式在局部子图中使用。
[0024]
本技术方案中,给出消息聚合和表示更新的具体公式,全局图和局部子图之间通过消息传递机制进行交互,进而使得基于多粒度图时空神经网络的污染物浓度预测模型能够实现对污染物浓度值的预测,提高预测的准确性。
[0025]
上述任一技术方案中,消息聚合的方式为从局部子图向全局图聚合,从局部子图传递的信息包括局部污染物浓度值,在全局图采用平均法对从局部子图传递过来的信息进行聚合:
[0026][0027]
其中,表示全局图中第a全局节点第t时刻聚合值,表示第a个局部子图中第i个局部节点第t时刻局部污染物浓度值,|sa|表示全局图中第a个局部子图的局部节点个数,mean(
·
)表示求数组平均值;对于全局图中每个全局节点,利用消息聚合计算每个时间段的区域污染物浓度值,得到浓度时间序列将浓度时间序列输入至第一长短期记忆人工神经网络,将第一长短期记忆人工神经网络中每个时间段的隐层状态作为全局图中全局节点的初始属性,其中,τ
in
表示输入的历史起始时间段。
[0028]
本技术方案中,全局图采用平均法对从局部子图传递过来的信息进行聚合,可以更好地建立全局图与全局子图之间的关系,进而有效提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0029]
上述任一技术方案中,获取多个大气监测站点的历史监测数据,根据历史监测数据生成全局图数据和局部子图数据,具体包括:
[0030]
生成全局图数据,全局图数据包括全局节点的属性信息和特征信息、全局图的邻接矩阵、全局图中边的属性信息,其中,全局节点的属性信息包括历史区域污染物浓度值,
区域污染物浓度值通过区域内所有大气监测站点对应污染物浓度值求平均得到,全局节点的特征信息包括历史的区域气象参数以及区域时间特征,全局图中边的属性信息包括地理位置相似度、风向相似度和平流系数;生成局部子图数据,局部子图数据包括局部节点历史的属性信息和特征信息、局部子图的邻接矩阵、局部子图中边的属性信息,其中,局部节点的属性信息包括历史局部污染物浓度值,通过大气监测站点的监测数据得到,局部节点的特征信息包括历史的局部气象参数、土地利用类型数据和局部时间特征。
[0031]
本技术方案中,通过多个大气监测站点的历史监测数据,生成全局图数据和局部子图数据,为后续对基于多粒度图时空神经网络的污染物浓度预测模型进行训练提供了数据。
[0032]
上述任一技术方案中,全局图的邻接矩阵和全局图中边的属性信息,具体为:
[0033]
全局图的邻接矩阵表示两个全局节点之间的连接关系:
[0034]aij
=h(d
ij-d
θ
)
·
h(m
ij-m
θ
);
[0035]
其中,a
ij
表示全局节点i和全局节点j之间的邻接关系,h(x)表示单位阶跃函数,当x>0时,h(x)=1;d
ij
表示全局节点i和全局节点j之间的距离,d
θ
表示全局节点之间的距离阀值,m
ij
表示表示全局节点i和全局节点j之间的海拔高度,m
θ
表示海拔高度阀值;
[0036][0037]
其中,λ表示平衡因子(根据人为经验设定),h(ρ)表示位置ρ处的海拔,ρi表示全局节点i处的位置,ρj表示全局节点j处的位置,sup{
·
}表示上确界;
[0038]
全局图中的地理位置相似度为:
[0039][0040]
其中,(xi,yi)表示全局节点i的坐标,(xj,yj)表示全局节点j的坐标,gs
i,j
全局节点i和全局节点j的地理位置相似度,gs
j,i
表示表示全局节点j和全局节点i的地理位置相似度;
[0041]
全局图中的风向相似度为:
[0042][0043]
其中,ws
i,j
表示全局节点i到全局节点j的风向相似度,ws
j,i
表示全局节点j到全局节点i的风向相似度,θ
ij->i
表示全局节点i和全局节点j之间直线与全局节点i的风向的夹角,θ
ij->j
表示全局节点i和全局节点j之间直线与全局节点j的风向的夹角;
[0044]
平流系数为:
[0045][0046]
其中,s
i,j
表示全局节点i到全局节点j的平流系数,s
j,i
表示全局节点j到全局节点
i的平流系数,vi,vi分别表示全局节点i、全局节点j处的风速,d
ij
表示全局节点i和全局节点j之间的距离;αi表示全局节点i和全局节点j之间直线与全局节点i的风向的夹角,αj表示全局节点i和全局节点j之间直线与全局节点j的风向的夹角,relu(
·
)表示修正线性单元激活函数。
[0047]
本技术方案中,给出了全局图中邻接矩阵、地理位置相似度、风向相似度、平流系数的具体获取方式,使得基于多粒度图时空神经网络的污染物浓度预测模型可以对污染物浓度值进行预测。
[0048]
上述任一技术方案中,局部子图的邻接矩阵、局部子图中边的属性信息,具体为:
[0049]
设定局部子图的邻接矩阵为m
×
(m-1)的全1矩阵,其中,m为局部节点数;
[0050]
局部子图中的地理位置相似度为:
[0051][0052]
其中,(xk,yk)表示局部节点k的坐标,(xq,yq)表示局部节点q的坐标,gs
k,q
表局部节点k和局部节点q的地理位置相似度,gs
q,k
表示局部节点q和局部节点k的地理位置相似度;
[0053]
局部子图中的风向相似度为:
[0054][0055]
其中,ws
k,q
表示局部节点k到局部节点q的风向相似度,ws
q,k
表示局部节点q到局部节点k的风向相似度,θ
kq->k
表示局部节点k和局部节点q之间直线与局部节点k的风向的夹角,θ
kq->q
表示局部节点k和局部节点q之间直线与局部节点q的风向的夹角。
[0056]
本技术方案中,给出了局部子图邻接矩阵、地理位置相似度、风向相似度的具体获取方式,使得基于多粒度图时空神经网络的污染物浓度预测模型可以对污染物浓度值进行预测。
[0057]
上述任一技术方案中,区域时间特征和局部时间特征均包括季度、月度、周日、小时及节假日特征,季度采用one-hot(独热)编码方式进行4位二进制表示,月度采用one-hot编码方式进行12位二进制表示;周日采用one-hot编码方式进行7位二进制表示;小时采用one-hot编码方式进行24位二进制表示;节假日采用one-hot编码方式进行2位二进制表示。
[0058]
本技术方案中,采用one-hot编码方式对区域时间特征和局部时间特征进行表示,通过增加时间特征,可以充分挖掘站点污染物浓度变化的时间规律,提升污染物浓度预测值的准确率。
[0059]
上述任一技术方案中,土地利用类型数据根据大气监测站点以第一半径的圆圈内居民区、公园、山、湖泊和工厂的数量确定。
[0060]
本技术方案中,充分利用大气监测站点污染物浓度之间的空间关系和地形关系,通过增加土地利用类型数据,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0061]
上述任一技术方案中,采用全局图数据和局部子图数据训练基于多粒度图时空神经网络的污染物浓度预测模型,具体包括:
[0062]
设定损失函数,损失函数采用均方差,具体如下:
[0063][0064]
其中,分别表示真实值和预测值,n表示测试样本个数;
[0065]
设定激活函数,具体如下:
[0066][0067]
其中,α为[0,1]之间的常数参数,x表示变量;
[0068]
采用全局图数据进行全局图时空神经网络训练,生成全局图的特征信息,全局图时空神经网络只训练一次,全局图的特征信息作为局部子图时空神经网络的全局图的特征信息输入;
[0069]
采用局部子图数据和全局图时空神经网络训练得到的全局图的特征信息,进行局部子图时空神经网络训练。
[0070]
本技术方案中,本实施例采用获取的全局图数据和局部子图数据对基于多粒度图时空神经网络的污染物浓度预测模型进行训练,提升基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0071]
为实现本发明的第二目的,本发明的技术方案提供了一种基于多粒度图时空神经网络的污染物浓度预测装置,包括:存储器和处理器,存储器存储有程序或指令,处理器执行程序或指令;其中,处理器在执行程序或指令时,实现如本发明任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的步骤。
[0072]
本技术方案提供的基于多粒度图时空神经网络的污染物浓度预测装置实现如本发明任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的步骤,因而其具有如本发明任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的全部有益效果,在此不再赘述。
[0073]
为实现本发明的第三目的,本发明的技术方案提供了一种可读存储介质,可读存储介质存储有程序或指令,程序或指令被执行时,实现上述任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的步骤。
[0074]
本技术方案提供的可读存储介质实现如本发明任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的步骤,因而其具有如本发明任一技术方案的基于多粒度图时空神经网络的污染物浓度预测方法的全部有益效果,在此不再赘述。
[0075]
本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
[0076]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0077]
图1为根据本发明一个实施例的基于多粒度图时空神经网络的污染物浓度预测方法流程图之一;
[0078]
图2为根据本发明一个实施例的基于多粒度图时空神经网络的污染物浓度预测方法流程图之二;
[0079]
图3为根据本发明一个实施例的基于多粒度图时空神经网络的污染物浓度预测装置示意框图;
[0080]
图4为根据本发明一个实施例的污染物浓度预测技术路线示意框图;
[0081]
图5为根据本发明一个实施例的多粒度图时空神经网络示意图;
[0082]
图6为根据本发明一个实施例的污染物浓度预测模型架构示意框图;
[0083]
图7为根据本发明一个实施例的站点土地利用类型示意图;
[0084]
图8为根据本发明一个实施例的消息聚合示意框图;
[0085]
图9为根据本发明一个实施例的表示更新示意框图。
[0086]
其中,图3至图6中附图标记与部件名称之间的对应关系为:
[0087]
100:多粒度图时空神经网络设计,110:数据生成与处理,120:模型训练,130:编码结构,132:第一长短期记忆人工神经网络,140:解码结构,142:第二长短期记忆人工神经网络模型,144:第一全连接层,200:基于多粒度图时空神经网络的污染物浓度预测装置,210:存储器,220:处理器。
具体实施方式
[0088]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0089]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0090]
下面参照图1至图9描述本发明一些实施例的基于多粒度图时空神经网络的污染物浓度预测方法及装置。
[0091]
实施例1:
[0092]
如图1所示,本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,包括以下步骤:
[0093]
步骤s102,对多个大气监测站点进行区域划分和分层,得到全局图和局部子图,分别设定全局图和局部子图中节点的属性信息和特征信息,全局图和局部子图中边的属性信息,构建基于多粒度图时空神经网络的污染物浓度预测模型。
[0094]
步骤s104,获取多个大气监测站点的历史监测数据,根据历史监测数据生成全局图数据和局部子图数据。
[0095]
步骤s106,采用全局图数据和局部子图数据训练基于多粒度图时空神经网络的污染物浓度预测模型。
[0096]
步骤s108,获取多个大气监测站点的第一时长内的历史污染物浓度值和历史气象参数,获取多个大气监测站点的未来第二时长内的未来气象参数。
[0097]
步骤s110,将历史污染物浓度值、历史气象参数和未来气象参数输入至训练后的基于多粒度图时空神经网络的污染物浓度预测模型,得到多个大气监测站点的未来第二时
长内的未来污染物浓度值,即得到污染物浓度预测值。
[0098]
大气监测站点可以对污染物浓度值进行预测,本实施例中,污染物浓度值可以包括pm2.5、pm10、so2、co2、co、o3等6大污染物,通过提供6大污染物的污染物浓度值,可以使通过本实施例预测的未来污染物浓度值更加全面和精确的反映出大气污染物情况。
[0099]
本实施例中,第一时长与第二时长可以根据实际情况灵活设定,例如,可以设置为24小时,获取多个大气监测站点的24小时内的历史污染物浓度值和历史气象参数,再获取多个大气监测站点的未来24小时内的未来气象参数;将历史污染物浓度值、历史气象参数和未来气象参数输入至训练后的基于多粒度图时空神经网络的污染物浓度预测模型,得到多个大气监测站点的未来第二时长内的未来污染物浓度值。通过灵活设置第一时长与第二时长,可以满足实际应用中的不同需求,提升生活体验。
[0100]
本实施例中的基于多粒度图时空神经网络的污染物浓度预测模型,充分利用大气监测站点之间的动态空间关系进行大气监测站点污染物浓度预测,提高污染物浓度预测值的准确度。
[0101]
相关技术中,大气监测站点的污染物浓度预测是典型的时空数据处理预测问题,为了利用时序信息,常用的方法是采用lstm进行建模,为了利用大气监测站点空间信息,常用的方法是将大气监测站点进行网格划分后转换成图像,再利用cnn进行建模。然而,在采用cnn建模时只是简单的利用了大气监测站点之间的空间关系,在实际应用中大气监测站点之间的相互影响关系是时刻变化的,cnn只是刻画了其静态的地理关系。
[0102]
本实施例中,图时空神经网络构建大气监测站点之间的动态边关系,从而可以很好的刻画大气监测站点之间的动态拓扑结构,可以更好的对污染物浓度进行预测。
[0103]
本实施例将大气监测站点相互影响关系进一步划分为区域级和站点级,提出基于多粒度图时空神经网络的污染物浓度预测模型,可以更好的刻画站点与站点、站点与区域、区域与区域之间的相互影响关系,本实施例充分利用大气监测站点之间的动态空间关系进行站点污染物浓度预测,提高预测结果的准确性。
[0104]
实施例2:
[0105]
如图2所示,本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0106]
对多个大气监测站点进行区域划分和分层,得到全局图和局部子图,具体包括以下步骤:
[0107]
步骤s202,获取多个大气监测站点的经纬度,根据经纬度对多个大气监测站点进行聚类,得到多个区域,将区域设为全局节点,将区域内的大气监测站点设为局部节点,得到全局图和局部子图。
[0108]
本实施例中,根据大气监测站点的经纬度,对大气监测站点进行聚类,实现嵌套的全局图和局部子图时空神经网络,充分利用图的拓扑性质处理时空数据,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0109]
实施例3:
[0110]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0111]
分别设定全局图和局部子图中节点的属性信息和特征信息,全局图和局部子图中
边的属性信息,具体包括:
[0112]
设定全局节点的属性信息,包括区域污染物浓度值,全局节点的特征信息包括区域气象参数和区域时间特征;在两个全局节点之间的地理距离小于等于第一阀值的情况下,在两个全局节点之间建立一条边,设定两个全局节点之间边的属性信息,包括两个全局节点之间的相似度,两个全局节点之间的相似度包括地理位置相似度、风向相似度和平流系数;
[0113]
设定局部节点的属性信息,包括大气监测站点的局部污染物浓度值,局部节点的特征信息包括大气监测站点的局部气象参数、土地利用类型数据和局部时间特征;在任意两个局部节点之间建立一条边,设定两个局部节点之间边的属性信息,包括两个局部节点之间的相似度,两个局部节点之间的相似度包括地理位置相似度和风向相似度。
[0114]
本实施例中,在对大气监测站点进行分析后,充分利用大气监测站点污染物浓度之间的空间关系和地形关系,在多粒度图时空神经网络的设计中,将土地利用类型数据设计成局部节点的特征信息,将全局图中的边属性设计成地理相似度、风向相似度和平流参数,充分利用图的拓扑性质处理时空数据,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0115]
本实施例中,可以将季度、月份、周日和小时、节假日等时间特征设计成节点特征,举例而言,区域时间特征可以包括季度、月份、周日和小时、节假日等,局部时间特征也可以包括季度、月份、周日和小时、节假日等,通过将上述时间特征设计为对应的节点特征,可以充分挖掘站点污染物浓度变化的时间规律,提升污染物浓度预测值的准确率。
[0116]
实施例4:
[0117]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0118]
构建基于多粒度图时空神经网络的污染物浓度预测模型,具体包括:采用编解码结构,在编码结构中,构建全局级和局部级两种粒度图结构,全局图和局部子图之间通过消息传递机制进行交互,局部节点将属性信息向上传递至全局节点,全局节点将属性信息向下更新至局部节点,在每个时间段中,计算每个全局节点的属性信息,并更新对应的局部节点的属性信息,通过一轮信息传递过程后,生成局部节点属性信息的时间序列,时间序列输入至第一长短期记忆人工神经网络进行编码,第一长短期记忆人工神经网络的最终状态输入至解码结构中。
[0119]
在解码结构中,第一长短期记忆人工神经网络的最终状态输入至第二长短期记忆人工神经网络,局部节点的未来气象参数与第一全连接层输出的污染物浓度预测值进行拼接后,输入至第二长短期记忆人工神经网络,第二长短期记忆人工神经网络进行解码,将第二长短期记忆人工神经网络的最后结果输入至第一全连接层,第一全连接层输出污染物浓度预测值。
[0120]
本实施例中,通过采用编解码结构构建基于多粒度图时空神经网络的污染物浓度预测模型,其中,多粒度图时空神经网络为核心结构,通过构建两种粒度,有效提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0121]
实施例5:
[0122]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述
实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0123]
全局图和局部子图之间通过消息传递机制进行交互,具体包括:
[0124]
消息传递机制主要包括消息聚合和表示更新,消息聚合为:
[0125]
ra={(xs,xa,e
a,s
)}
s∈ν(a)
ꢀꢀ
(1);
[0126]
ra←
ψ(ra)
ꢀꢀ
(2);
[0127]
其中,ra表示全局图中全局节点a的所有消息集合,xa表示全局图中全局节点a的属性信息,xs表示全局图中全局节点a的邻近节点属性信息,e
a,s
表示全局图边属性信息,ν(a)表示全局图中全局节点a的邻接节点集,ra表示全局图中全局节点a的聚合向量,ψ(
·
)表示聚合函数;
[0128]
表示更新为:
[0129][0130]
其中,表示第一更新函数,表示第二更新函数,r
a,i
表示第a个局部子图中第i个局部节点的聚合向量,x
a,i
表示第a个局部子图中第i个局部节点的属性信息,x'a表示更新后的全局图中全局节点a的属性信息,ra表示全局图中全局节点a的聚合向量,x'
a,i
表示更新后第a个局部子图中第i个局部节点的属性信息,ua表示全局图中节点a的属性向量,采用不同全连接层实现。
[0131]
表示更新的方式为利用全局图更新局部子图,从全局图传递的信息包括区域污染物浓度值,在每一个时间段,全局图的输出输入至第二全连接层,第二全连接层得到向下更新向量,利用向下更新向量对局部子图对应的全局属性信息进行更新,局部子图对应的全局属性信息包括气象参数和向下更新向量,全局属性信息使用消息传递方式在局部子图中使用。
[0132]
本实施例中,给出消息聚合和表示更新的具体公式,全局图和局部子图之间通过消息传递机制进行交互,进而使得基于多粒度图时空神经网络的污染物浓度预测模型能够实现对污染物浓度值的预测,提高预测的准确性。
[0133]
本实施例给出了通过全局图更新局部子图的方式,通过全局图对局部子图进行更新,可以实现基于多粒度图时空神经网络的污染物浓度预测模型对污染物浓度值进行预测,提高预测的准确性。
[0134]
实施例6:
[0135]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0136]
消息聚合的方式为从局部子图向全局图聚合,从局部子图传递的信息包括局部污染物浓度值,在全局图采用平均法对从局部子图传递过来的信息进行聚合:
[0137][0138]
其中,表示全局图中第a全局节点第t时刻聚合值,表示第a个局部子图中第i个局部节点第t时刻局部污染物浓度值,|sa|表示全局图中第a个局部子图的局部节点个数,mean(
·
)表示求数组平均值;对于全局图中每个全局节点,利用消息聚合计算每个
时间段的区域污染物浓度值,得到浓度时间序列将浓度时间序列输入至第一长短期记忆人工神经网络,将第一长短期记忆人工神经网络中每个时间段的隐层状态作为全局图中全局节点的初始属性,其中,τ
in
表示输入的历史起始时间段。
[0139]
本实施例中,全局图采用平均法对从局部子图传递过来的信息进行聚合,可以更好地建立全局图与全局子图之间的关系,进而有效提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0140]
实施例7:
[0141]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0142]
获取多个大气监测站点的历史监测数据,根据历史监测数据生成全局图数据和局部子图数据,具体包括:
[0143]
生成全局图数据,全局图数据包括全局节点历史的属性信息和特征信息、全局图的邻接矩阵、全局图中边的属性信息,其中,全局节点的属性信息包括历史区域污染物浓度值,区域污染物浓度值通过区域内所有大气监测站点对应污染物浓度值求平均得到,全局节点的特征信息包括历史的区域气象参数以及区域时间特征,全局图中边的属性信息包括地理位置相似度、风向相似度和平流系数。
[0144]
生成局部子图数据,局部子图数据包括局部节点历史的属性信息和特征信息、局部子图的邻接矩阵、局部子图中边的属性信息,其中,局部节点的属性信息包括历史局部污染物浓度值,通过大气监测站点的监测数据得到,局部节点的特征信息包括历史的局部气象参数、土地利用类型数据和局部时间特征。
[0145]
本实施例中,通过多个大气监测站点的历史监测数据,生成全局图数据和局部子图数据,为后续对基于多粒度图时空神经网络的污染物浓度预测模型进行训练提供了数据。
[0146]
实施例8:
[0147]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0148]
全局图的邻接矩阵和全局图中边的属性信息,具体为:
[0149]
全局图的邻接矩阵表示两个全局节点之间的连接关系:
[0150]aij
=h(d
ij-d
θ
)
·
h(m
ij-m
θ
)
ꢀꢀ
(5);
[0151]
其中,a
ij
表示全局节点i和全局节点j之间的邻接关系,h(x)表示单位阶跃函数,当x>0时,h(x)=1;d
ij
表示全局节点i和全局节点j之间的距离,d
θ
表示全局节点之间的距离阀值,m
ij
表示全局节点i和全局节点j之间的海拔高度,m
θ
表示海拔高度阀值;
[0152][0153]
其中,λ表示平衡因子参数(根据经验设定),h(ρ)表示位置ρ处的海拔,ρ可以为ρi、ρj或λρi (1-λ)ρj,ρi表示全局节点i处的位置,ρj表示全局节点j处的位置,sup{
·
}表示上确界;
[0154]
全局图中的地理位置相似度为:
[0155][0156]
其中,(xi,yi)表示全局节点i的坐标,(xj,yj)表示全局节点j的坐标,gs
i,j
全局节点i和全局节点j的地理位置相似度,gs
j,i
表示表示全局节点j和全局节点i的地理位置相似度。
[0157]
全局图中的风向相似度为:
[0158][0159]
其中,ws
i,j
表示全局节点i到全局节点j的风向相似度,ws
j,i
表示全局节点j到全局节点i的风向相似度,θ
ij->i
表示全局节点i和全局节点j之间直线与全局节点i的风向的夹角,θ
ij->j
表示全局节点i和全局节点j之间直线与全局节点j的风向的夹角;
[0160]
平流系数为:
[0161][0162]
其中,s
i,j
表示全局节点i到全局节点j的平流系数,s
j,i
表示全局节点j到全局节点i的平流系数,vi,vi分别表示全局节点i、全局节点j处的风速,d
ij
表示全局节点i和全局节点j之间的距离;αi表示全局节点i和全局节点j之间直线与全局节点i的风向的夹角,αj表示全局节点i和全局节点j之间直线与全局节点j的风向的夹角,relu(
·
)表示修正线性单元激活函数。
[0163]
本实施例中,给出了全局图中邻接矩阵、地理位置相似度、风向相似度、平流系数的具体获取方式,使得基于多粒度图时空神经网络的污染物浓度预测模型可以对污染物浓度值进行预测。
[0164]
实施例9:
[0165]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0166]
局部子图的邻接矩阵、局部子图中边的属性信息,具体为:
[0167]
设定局部子图的邻接矩阵为m
×
(m-1)的全1矩阵,其中,m为局部节点数;
[0168]
局部子图中的地理位置相似度为:
[0169][0170]
其中,(xk,yk)表示局部节点k的坐标,(xq,yq)表示局部节点q的坐标,gs
k,q
表局部节点k和局部节点q的地理位置相似度,gs
q,k
表示局部节点q和局部节点k的地理位置相似度;
[0171]
局部子图中的风向相似度为:
[0172][0173]
其中,ws
k,q
表示局部节点k到局部节点q的风向相似度,ws
q,k
表示局部节点q到局部节点k的风向相似度,θ
kq->k
表示局部节点k和局部节点q之间直线与局部节点k的风向的夹角,θ
kq->q
表示局部节点k和局部节点q之间直线与局部节点q的风向的夹角。
[0174]
本实施例中,给出了局部子图邻接矩阵、地理位置相似度、风向相似度的具体获取方式,使得基于多粒度图时空神经网络的污染物浓度预测模型可以对污染物浓度值进行预测。
[0175]
实施例10:
[0176]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0177]
区域气象参数和局部气象参数进行标准化处理,具体为:
[0178][0179]
其中,x
*
表示标准化后的区域气象参数或局部气象参数,x表示原区域气象参数或局部气象参数,μ为气象数据的均值,σ为气象数据标准差。
[0180]
本实施例中,对区域气象参数和局部气象参数进行标准化处理,进行处理后的数据可以提高基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确性。
[0181]
本实施例中处理后的区域气象参数和局部气象参数,在进行基于多粒度图时空神经网络的污染物浓度预测模型时,为了提高上述模型的泛化能力,在模型训练时可以区域气象参数和局部气象参数随机加噪声,使其尽可能的接近实际的预测气象数据。
[0182]
实施例11:
[0183]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0184]
区域时间特征和局部时间特征均包括季度、月度、周日、小时及节假日特征,季度采用one-hot编码方式进行4位二进制表示,月度采用one-hot编码方式进行12位二进制表示;周日采用one-hot编码方式进行7位二进制表示;小时采用one-hot编码方式进行24位二进制表示;节假日采用one-hot编码方式进行2位二进制表示。
[0185]
本实施例中,采用one-hot编码方式对区域时间特征和局部时间特征进行表示,通过增加时间特征,可以充分挖掘站点污染物浓度变化的时间规律,提升污染物浓度预测值的准确率。
[0186]
实施例12:
[0187]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0188]
土地利用类型数据根据大气监测站点以第一半径的圆圈内居民区、公园、山、湖泊和工厂的数量确定。
[0189]
本实施例中,充分利用大气监测站点污染物浓度之间的空间关系和地形关系,通
过增加土地利用类型数据,提高了基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。
[0190]
实施例13:
[0191]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法,除上述实施例的技术特征以外,本实施例进一步地包括了以下技术特征:
[0192]
采用全局图数据和局部子图数据训练基于多粒度图时空神经网络的污染物浓度预测模型,具体包括:
[0193]
设定损失函数,损失函数采用均方差,具体如下:
[0194][0195]
其中,分别表示真实值和预测值,n表示测试样本个数;
[0196]
设定激活函数,具体如下:
[0197][0198]
其中,α为[0,1]之间的常数参数,x表示变量;
[0199]
采用全局图数据进行全局图时空神经网络训练,生成全局图的特征信息,全局图时空神经网络只训练一次,全局图的特征信息作为局部子图时空神经网络的全局图的特征信息输入;
[0200]
采用局部子图数据和全局图时空神经网络训练得到的全局图的特征信息,进行局部子图时空神经网络训练。
[0201]
本实施例采用获取的全局图数据和局部子图数据对基于多粒度图时空神经网络的污染物浓度预测模型进行训练,提升基于多粒度图时空神经网络的污染物浓度预测模型预测污染物浓度值的准确率。其中,全局图数据和局部子图数据按照分配方案构建训练集、验证集和测试集。
[0202]
本实施例通过获取的历史数据对基于多粒度图时空神经网络的污染物浓度预测模型进行训练,训练后的模型可以用于预测污染物浓度值。
[0203]
实施例14:
[0204]
如图3所示,本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测装置200,包括:存储器210和处理器220,存储器210存储有程序或指令,处理器220执行程序或指令;其中,处理器220在执行程序或指令时,实现如本发明任一实施例的一种基于多粒度图时空神经网络的污染物浓度预测方法的步骤。
[0205]
实施例15:
[0206]
本实施例提供了一种可读存储介质,可读存储介质存储有程序或指令,程序或指令被处理器执行时,实现上述任一实施例的一种基于多粒度图时空神经网络的污染物浓度预测方法的步骤。
[0207]
实施例16:
[0208]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法(即基于多粒度图时空神经网络的污染物浓度预测方法),技术路线如图4所示,主要包括多粒度图
时空神经网络设计100、数据生成与处理110和模型训练120三大部分,具体的:
[0209]
第一部分:多粒度图时空神经网络设计
[0210]
(1)区域划分及分层
[0211]
假定对某个城市中所有大气监测站点未来的空气质量进行预测预报,即对pm2.5、pm10、so2、co2、co、o3等6大污染物进行浓度预测。首先,对城市中所有大气监测站点根据其经纬度信息进行聚类分析,得到n个类别,即聚类出n个区域。因此,每个区域可以作为全局图中的一个节点,而区域内各个站点可以作为局部子图节点。由区域级节点构成的图叫全局图,而由站点级节点构成的图叫局部子图。由此可以构建多粒度图时空神经网络,如图5所示,其中:粗粒度图为基于区域的全局图,细粒度图为基于大气监测站点级的局部子图。
[0212]
(2)节点属性及特征定义
[0213]
对于全局图中的全局节点,其属性信息为该节点区域的6大污染物浓度值,其特征信息为该节点区域的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数,加上季度、月度、周日、小时、节假日等区域时间特征。
[0214]
对于局部子度图中的局部节点,其属性信息为该节点所在站点的6大污染物浓度值,其特征信息为该节点所在站点的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数,加上该节点所在站点的土地利用类型特征,再加上季度、月度、周日、小时、节假日等局部时间特征。
[0215]
(3)边及属性定义
[0216]
对于全局图,其边的定义为:如果两个全局节点之间的地理距离不大于某一阀值,则此两个全局节点构成一条边;否则,不建立边关系。由此规则可以构建全局有向图。全局有向图边属性为两连接全局节点之间的相似度,包括地理位置相似度、风向相似度和平流系数3个参数。其中,地理位置相似度为静态值,风向相似度和平流系数根据气象条件变化而变化,是动态值。因此,全局有向图为动态图。
[0217]
对于局部子图,其边的定义为:任意一个局部节点与其它局部节点都建立边关系。由此规则可以构建局部有向子图。局部有向子图边属性为两连接局部节点之间的相似度,包括地理位置相似度和风向相似度2个参数。其中,地理位置相似度为静态值,风向相似度根据气象条件变化而变化,是动态值。因此,局部有向子图也为动态图。
[0218]
(4)模型架构设计
[0219]
污染物浓度预测模型架构如图6所示,整体架构采用编-解码(encoder-decoder)结构,包括编码结构130和解码结构140,其核心为多粒度图时空神经网络构建。在编码阶段(即编码结构130)构建全局级和局部级两种粒度图结构。全局和局部子图之间通过消息传递机制进行交互。局部子图信息(包括当前和历史污染物浓度信息)向上传递给全局图;而全局图信息(包括全局污染物浓度信息)反过来向下更新局部子图。在每个时间段中,多粒度图时空神经网络模型将计算每个全局节点属性信息,并利用其去更新对应的局部节点属性信息。通过一轮信息传递过程之后,所生成的局部节点属性时间序列值将被送入第一长短期记忆人工神经网络132(lstm,long short-term memory进行编码。在解码阶段,污染物浓度预测模型使用节点气象和时间特征辅助预测,解码采用第二长短期记忆人工神经网络模型142,第二长短期记忆人工神经网络142最后的隐藏状态作为输入特征输入第一全连接层144(fnn),由fnn输出最后污染物浓度预测结果(outputs)。图6中,t表示时长,τ
in
表示输
入的历史起始时间段,表示第二长短期记忆人工神经网络142中每个时间段的隐层状态,τ
out
表示输出的预测结束时间段,输入为inputs(历史污染物浓度、气象参数),输出为outputs(污染物浓度预测结果),weather表示未来气象参数,污染物浓度计算结果与天气参数进行拼接,再输入至第二长短期记忆人工神经网络142。
[0220]
第二部分:数据生成与处理。
[0221]
(1)全局图数据生成与处理
[0222]
全局图数据包括有全局节点属性信息和特征信息、全局邻接矩阵、全局图边属性信息等3大类型数据需要生成与处理:
[0223]
全局节点属性信息为pm2.5、pm10、so2、co2、co、o3等6大污染物的浓度值,由全局节点所在区域内所有站点对应污染物浓度求平均所得。全局节点特征信息为全局节点所在区域历史(或当前及历史)的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数(通过气象局和相关非盈利性机构获取),再加上季度、月度、周日、小时、节假日等全局时间特征(通过监测站获取)。
[0224]
全局图的邻接矩阵如式(5)和式(6)所示,全局图中的地理位置相似度、风向相似度和平流系数如式(7)至式(9)所示。
[0225]
(2)局部子图数据生成与处理
[0226]
局部子图数据包括有局部节点属性信息和特征信息、局部邻接矩阵、局部子图边属性等3大类型数据需要生成与处理:
[0227]
局部节点属性信息为pm2.5、pm10、so2、co2、co、o3等6大污染物的浓度值,从大气监测站点监测数据获取。局部节点特征信息为站点当前观测及未来预报的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数,再加上季度、月度、周日、小时、节假日等时间特征信息,通过大气监测站点、气象局和相关非盈利性机构获取。
[0228]
局部邻接矩阵表示局部节点与局部节点之间的连接关系,由于通过聚类后每个局部子图中局部节点都是比较邻近的,即所有局部节点之间都有邻接关系。因此,其邻接矩阵为m
×
(m-1)的全1矩阵,其中m为局部节点数。
[0229]
边属性包括地理相似度和风向相似度,如式(10)和式(11)所示。
[0230]
(3)气象和时间数据生成与处理
[0231]
区域气象参数和局部气象参数包括的参数类型相同,气象数据包括边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数,可以通过大气监测站点、气象局和相关非盈利性机构获取。对获取的气象数据进行z-score标准化处理,如式(12)所示,由于未来污染物浓度和未来气象密切相关,因此在预测模型中需要包含有未来气象特征。但未来气象是通过模型预测出来的,有一定的误差,为了提高模型的泛化能力,在模型训练时给气象数据随机加噪声,使其尽可能的接近实际的预测气象数据。
[0232]
时间数据包括季度、月度、周日、小时及节假日5大特征:
[0233]
季度采用one-hot编码方式进行4位二进制表示,如下表1所示:
[0234]
表1季度的one-hot编码方式表示
[0235] 春季夏季秋季冬季春季1000夏季0100
秋季0010冬季0001
[0236]
同理,月度采用one-hot编码方式进行12位二进制表示;周日采用one-hot编码方式进行7位二进制表示;小时采用one-hot编码方式进行24位二进制表示;节假日采用one-hot编码方式进行2位二进制表示。
[0237]
(4)站点土地利用类型数据生成与处理
[0238]
站点土地利用类型根据站点以r为半径的圆圈内居民区、公园、山、湖泊、和工厂的数量而确定,如图7所示,图中五角星表示站点,其周边r半径内有2个居民区、1个公园、1座山、1个湖泊和2个工厂,因此其土地利用类型特征向量为:[2,1,1,1,2]。
[0239]
第三部分:模型训练。
[0240]
(1)设定损失函数,如式(13)所示。
[0241]
(2)设定激活函数,如式(14)所示。
[0242]
(3)全局图时空网络训练
[0243]
利用第二部分生成的全局图数据进行全局图时空网络训练生成全局图特征信息,全局图时空网络模型只需要训练一次,其结果作为局部子图时空网络模型的全局图特征信息输入。
[0244]
(4)局部子图时空网络训练
[0245]
对城市中所有大气监测站点根据其经纬度信息进行聚类分析,得到n个类别,即聚类出n个区域。每个区域构建一个局部子图时空网络模型,因此有n个局部子图时空网络模型需要训练。结合第二部分生的局部子图数据和全局图时空网络模型训练结果作为输入进行局部子图时空网络训练,其训练输出结果输入解码器进行解码后便可得出各站点污染物浓度预测值。
[0246]
本实施例的有益效果包括:
[0247]
(1)大气监测站点污染物浓度预测是一个典型的时空数据处理预测问题。为了利用时序信息,目前常用的方法是采用lstm进行建模,为了利用站点空间信息,目前常用的方法是将站点进行网格划分后转换成图像后利用cnn进行建模。然而,在采用cnn建模时只是简单的利用了站点之间的空间关系,在实际应用中站点之间的相互影响关系是时刻变化的,cnn只是刻画了其静态的地理关系。而本发明提出的图时空神经网络通过构建站点之间动态边关系,从而可以很好的刻画站点之间的动态拓扑结构,更有利于污染物浓度的预测。另外,本实施例将相互影响关系进一步划分为区域级和站点级,提出多粒度图时空神经网络模型,可以更好的刻画站点与站点、站点与区域、区域与区域之间的相互影响关系。即本实施例充分利用站点之间的动态空间关系进行站点污染物浓度预测,使得预测的准确度更高。
[0248]
(2)本实施例与其它方法相比,可以同时预测pm2.5、pm10、so2、co2、co、o3等6大污染物浓度;另外,也可以根据实际需求灵活设定预测时长。
[0249]
(3)本实施例提出多粒度图时空神经网络模型进行污染浓度预测,具体表现为设计出嵌套的全局图和局部子图时空神经网络,以充分利用图的拓扑性质处理时空数据,提高预测准确率。
[0250]
(4)为了充分利用站点污染物浓度之间的空间关系和地形关系,在图网络设计中,
将土地利用类型特征设计成节点特征,将边属性设计成地理相似度、风向相似度和平流参数。
[0251]
(5)为了充分挖掘站点污染物浓度变化的时间规律,将季度、月份、周日和小时、节假日等时间特征设计成节点特征。
[0252]
实施例17:
[0253]
本实施例提供了一种基于多粒度图时空神经网络的污染物浓度预测方法(即基于多粒度图时空神经网络的污染物浓度预测方法),实施例以某市监测站污染物浓度预测为例,某市位于某省的中部,地理位置介于北纬36
°
01
′
~37
°
32
′
,东经116
°
11
′
~117
°
44
′
,呈狭长形地形分布,总面积7998平方公里。某市共有130个大气监测站点,本实施例收集了某市130个大气监测站点2年的历史监测数据(污染物浓度和气象数据)作为训练与测试集。
[0254]
一、多粒度图时空神经网络构建
[0255]
目前现有的污染物浓度预测方法大都构建的是静态图网络。然而,静态图并不能充分描述大气监测站点之间的关系(图中边的关系),例如站点之间的风向关系是时刻变化的,并不是静态关系。因此,本实施例将构建一种动态多粒度图时空神经网络,如图7所示。本实施例用v表示节点集合,e表示节点之间边有关系集合,u表示全局图得出的全局属性。v包括有节点属性信息和节点特征信息,其中节点属性信息包括污染物浓度值,未来时刻节点属性值即为动态多粒度图时空神经网络的预测任务;节点特征信息包括气象参数和土地利用类型值。e包括地理相似度、风向相似度和平流参数。
[0256]
(1)空间关系构建
[0257]
多粒度图时空神经网络采用消息传递机制可以构建不同粒度的空间关系,消息传递机制主要包括消息聚合和表示更新两个过程。其中,消息聚合如式(1)和式(2)所示,表示更新如式(3)所示。
[0258]
具体的消息聚合方式为从局部子图向全局图聚合,如图8所示,从局部子图传递的信息包括当前和历史的污染物浓度值,在全局图上采用平均法对从局部子图传递过来的信息进行聚合,如式(4)所示。
[0259]
对于全局图中每个全局节点,利用消息聚合计算每个时间段的区域污染物浓度值,得到浓度时间序列将浓度时间序列输入至第一长短期记忆人工神经网络学习污染物浓度的当前和历史表示,图8中表示第一长短期记忆人工神经网络中每个时间段的隐层状态,将作为全局图中全局节点的初始属性,因此全局图包括当前和历史污染物浓度信息。
[0260]
具体的表示更新方式为利用全局图更新局部子图,如图9所示,从全局图传递的信息包括所有区域的历史的污染物浓度值。在每一个时间段,全局图的输出被送入第二全连接网络(fnn)得到一个向下的更新向量,利用向下更新向量对局部子图对应的全局属性u进行更新。局部子图对应的全局属性u包含气象参数和向下更新向量,u使用消息传递方式在局部子图中使用,因此站点级局部子图中的节点可以利用区域级全局图中邻接节点(邻接区域)的历史污染物浓度信息。
[0261]
(2)时间依赖关系构建
[0262]
为了捕获时间依赖关系,本实施例采用编-解码结构,如图7所示。在每一个时间段内,局部子图中局部节点属性形成一个时间序列:
[0263][0264]
即每个时间窗口对应有一个节点属性信息,t时间段内组成一个时间序列样本。编码器中的第一长短期记忆人工神经网络(lstm)使用x
a,i
作为输入,第一长短期记忆人工神经网络的最终状态作为解码器的输入。解码器中第二长短期记忆人工神经网络(lstm)的输入不仅包含编码器的输出还包含局部子图中节点的特征信息(时间段内的气象参数)。解码器中第二长短期记忆人工神经网络的输出作为第一全连接网络(fnn)的输入,第一全连接网络输出局部子图中局部节点属性预测值(未来τ
out
时间段内的污染物浓度值)。
[0265]
二、多粒度图时空神经网络数据生成与处理
[0266]
对某市中130个大气监测站点根据其经纬度信息进行聚类分析,得到13个类别,即聚类出13个区域。因此,每个区域可以做为一个全局节点,而每个区域内各个站点可以做为局部节点。由全局节点构成的图叫区域级全局图,而由局部节点构成的图叫站点级局部子图。
[0267]
(1)全局图数据生成与处理
[0268]
全局图数据包括有节点属性和特征、邻接矩阵、边属性等3大类型数据需要生成与处理:
[0269]
节点属性信息为pm2.5、pm10、so2、co2、co、o3等6大污染物的浓度值,由全局节点所在区域内所有站点对应污染物浓度求平均所得。全局节点特征信息为全局节点所在区域当前及历史的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数(通过气象局和相关非盈利性机构获取),再加上季度、月度、周日、小时等时间特征(通过监测站点获取)。
[0270]
全局图的邻接矩阵如式(5)和式(6)所示,全局图中的地理位置相似度、风向相似度和平流系数如式(7)至式(9)所示。
[0271]
(2)局部子图数据生成与处理
[0272]
局部子图数据包括有局部节点属性信息和特征信息、局部邻接矩阵、局部子图边属性等3大类型数据需要生成与处理:
[0273]
局部节点属性为pm2.5、pm10、so2、co2、co、o3等6大污染物的浓度值,从大气监测站点监测数据获取。节点特征为站点当前观测及未来预报的边界层高度、降雨量、表面气压、温度、湿度、风速和风向等7个气象参数,再加上季度、月度、周日、小时等时间特征信息,通过大气监测站点、气象局和相关非盈利性机构获取。
[0274]
局部邻接矩阵为m
×
(m-1)的全1矩阵,其中m为局部节点数。边属性包括地理相似度和风向相似度,如式(10)和式(11)所示。
[0275]
(3)气象数据和时间特征生成与处理
[0276]
区域气象参数和局部气象参数包括的参数类型相同,可以通过监测站点、中国气象局公共服务中心天气网(http://www.weather.com.cn)获取和南京云创大数据科技股份有限公司的环境云开放平台(http://www.envicloud.cn)获取。对获取的气象数据进行z-score标准化处理,如式(12)所示,另外,为了提高泛化能力给气象数据随机加高斯噪声,使
其尽可能的接近实际的预测气象数据。
[0277]
时间数据中季度采用one-hot编码方式进行4位二进制表示,如下表1所示,同理,月度采用one-hot编码方式进行12位二进制表示;周日采用one-hot编码方式进行7位二进制表示;小时采用one-hot编码方式进行24位二进制表示;节假日采用one-hot编码方式进行2位二进制表示。
[0278]
(4)站点土地利用类型数据生成与处理
[0279]
设定r为5公里,土地利用类型特征向量为:[2,1,1,1,2]。
[0280]
站点土地利用类型数据通过高德开放平台获取:
[0281]
https://lbs.amap.com/api/webservice/guide/api/search。
[0282]
第三部分:模型训练。
[0283]
(1)设定损失函数,如式(13)所示。
[0284]
(2)设定激活函数,如式(14)所示,其中,α设置为0.5。
[0285]
(3)超参数设置
[0286]
第一长短期记忆人工神经网络和第二长短期记忆人工神经网络均采用两层双向模型结构,其隐藏层大小为64;epoch=500;batch_size=128。多粒度图时空网络模型输入为历史24小时各站点污染物浓度值、气象数据及未来24小时气象数据,模型输出为未来24小时各站点的污染物浓度值。
[0287]
(4)多粒度图时空网络训练
[0288]
收集某市130个站点两年共700天的监测数据,监测数据以小时为单位给出,即一天有24条数据,700天共有16800=700天
×
24条/小时条数据。每连续的48条数据构成一个训练样本,其中前24条作为输入值,后24条作为输出的真实值。因此,按1小时为步长可以获取共个样本。将16753个样本按0.7:0.1:0.2分配方案构建训练集、验证集和测试集。
[0289]
全局图网络训练:利用第二部分生成的全局图数据进行全局图时空网络训练生成全局图特征,全局图时空网络模型只需要训练一次,其结果作为局部子图时空网络模型的全局图特征输入。
[0290]
局部子图时空网络训练:此处共有13个局部子图时空网络需要训练。结合第二部分生成的局部子图数据和全局图时空网络模型训练结果作为输入进行局部子图时空网络训练,其训练输出结果输入解码器进行解码后便可得出各站点污染物浓度预测值。
[0291]
在本发明中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0292]
本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
[0293]
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0294]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
