1.本发明主要涉及医疗器械领域,特别涉及一种单边驱动的药物输注装置。
背景技术:
2.药物输注装置是通过向患者体内持续注射药物,从而达到疾病治疗目的的一种医疗器械装置。药物输注装置广泛的用于糖尿病的治疗,按照人体需要的剂量将胰岛素持续地输注到患者的皮下,以此来模拟胰腺的分泌功能,从而保持患者血糖的稳定。药物流体通常储存在输注泵体内部,现有的药物输注装置通常是将泵体直接通过医用胶布粘贴在患者身体上,患者操作远程设备进行输注。
3.目前,现有的输注装置输注精度比较低,最高输注精度只仅限于驱动轮的最小步长所能确定的单元输注量,用户或者闭环系统不能灵活选择输注模式以满足身体对药物的实际需求。
4.因此,现有技术亟需一种具有高输注精度的药物输注装置。
技术实现要素:
5.本发明实施例公开了一种单边驱动的药物输注装置,设置至少2个挡墙,可以精确的控制驱动部件的转动幅度,提高输注装置的输注精度,用户或者闭环系统可以灵活选择不同的输注模式精确控制体液水平以满足身体的需要。
6.本发明公开了一种单边驱动的药物输注装置,包括:储药单元、活塞和螺杆,活塞设置于储药单元中,活塞与螺杆相连接;驱动单元,驱动单元包括至少一个转轴、至少一个驱动部件,驱动部件包括至少一个驱动端,驱动部件绕转轴转动使驱动端前进或复位;至少一个设置有轮齿的驱动轮,前进的驱动端推动轮齿使驱动轮转动,进而驱动螺杆前进;分别与驱动部件相连接的线性驱动器和复位单元,线性驱动器和复位单元分别对驱动部件施加作用力使驱动端分别前进和复位;至少2个挡墙,挡墙设置于驱动单元的同侧,用于限定所述驱动单元的前进位置。
7.根据本发明的一个方面,挡墙为弹性导电件。
8.根据本发明的一个方面,导电弹簧、导电弹片、导电橡胶或者导电硅胶。
9.根据本发明的一个方面,线性驱动器包括电驱动型线性驱动器或电加热型线性驱动器。
10.根据本发明的一个方面,复位单元包括电驱动型线性驱动器、电加热型线性驱动器。
11.根据本发明的一个方面,还包括设置在驱动单元的另一侧的至少一个挡墙。
12.根据本发明的一个方面,还包括控制单元,与设置在驱动单元的另一侧的至少一个挡墙共同控制驱动部件的运动终点。
13.根据本发明的一个方面,复位单元为弹性件,所述弹性件至少包括弹簧、弹片、弹性板、弹性棒或者弹性复位橡胶中的一种或多种。
14.根据本发明的一个方面,复位单元为弹性导电件。
15.根据本发明的一个方面,弹性导电件包括金属弹簧或导电橡胶。
16.根据本发明的一个方面,驱动部件具有多种不同的运作模式,进而使输注装置具有多种不同的单位输注量或输注速率。
17.根据本发明的一个方面,驱动部件的运作模式包括往复运动的幅度、往复运动的频率或者运动速率,驱动部件多种不同的运作模式包括多种不同幅度或频率的往复运动,或者包括多种不同的运动速率。
18.根据本发明的一个方面,还包括底座,驱动轮活动装配于底座上,底座与驱动轮摩擦配合,当驱动端在轮齿表面滑动时,驱动轮停止转动。
19.根据本发明的一个方面,还包括限位部件,限位部件活动装配于底座上以限定驱动轮的位置,限位部件与驱动轮摩擦配合,当驱动端在轮齿表面滑动时,驱动轮停止转动。
20.与现有技术相比,本发明的技术方案具备以下优点:
21.本发明公开的单边驱动的药物输注装置中,至少设置有2个挡墙,可以精确的控制驱动部件的转动幅度,提高输注装置的输注精度用户或者闭环系统可以任意选择合适的输注模式精确控制体液水平,满足用户需求,提高用户体验。
22.进一步的,复位单元包括电驱动型线性驱动器、电加热型线性驱动器或者弹性件。线性驱动器输出动力大小可通过电流控制,动力输出更稳定,进而使驱动部件运动的幅度或速率稳定可控。另外,当复位单元为弹性件时,驱动部件可以自动复位,不需要消耗电能,从而降低了输注装置的功耗和成本。
23.进一步的,驱动部件具有多种不同的运作模式,进而使输注装置具有多种不同的单位输注量或输注速率。当输注装置具有多种不同的单位输注量或输注速率时,根据身体的实际需求,用户或者闭环系统可以任意选择合适的输注模式精确控制体液水平,进一步提高用户体验。
24.进一步的,输注装置还包括底座,底座与驱动轮摩擦配合。当驱动端在轮齿表面滑动时,驱动轮停止转动,提高药物输注量的准确度,消除安全隐患。
25.进一步的,输注装置还包括限位部件,限位部件活动装配于底座上以限定驱动轮的位置,限位部件与驱动轮摩擦配合。限位部件能够充分利用输注装置的内部空间,且在多个位置与驱动轮摩擦配合。
附图说明
26.图1a-图1b为根据本发明不同实施例的单边驱动的药物输注装置的俯视图;
27.图2为根据本发明一个实施例的输注单元内部的主要结构示意图;
28.图3a-图3c为根据本发明不同实施例驱动端推动轮齿运动的结构俯视图;
29.图4a-图4c为根据本发明不同实施例线性驱动器、复位单元分别与驱动部件互相配合的结构示意图;
30.图5a-图5b为根据本发明另一个实施例线性驱动器拉力方向与螺杆前进方向不平行的结构示意图;
31.图6a-图6c分别为驱动部件处于初始位置,半程位置和全程位置的结构示意图;
32.图7为根据本发明实施例驱动部件往复旋转幅度变化示意图;
33.图8a-图8b为根据本发明实施例驱动轮和底座或限位部件摩擦配合的结构示意图;
34.图9为根据本发明一个实施例两个驱动部件共轴的结构示意图;
35.图10为根据本发明另一个实施例两个非共轴驱动部件的结构示意图;
36.图11a-图11b为根据本发明又一个实施例驱动部件的两个驱动端和分别与两个驱动轮和相互配合的结构示意图;
37.图12a-图12b为根据本发明再一个实施例驱动部件包括两个上下设置驱动端的结构示意图。
具体实施方式
38.如前所述,现有的输注装置输注精度比较低,最高输注精度只仅限于驱动轮的最小步长所能确定的单位输注量,用户或者闭环系统不能灵活选择输注模式以满足身体对药物的实际需求。
39.为了解决该问题,本发明提供了一种单边驱动的药物输注装置,设置至少2个挡墙,可以精确的控制驱动部件的转动幅度,提高输注装置的输注精度,用户或者闭环系统可以灵活选择不同的输注模式精确控制体液水平以满足身体的需要。
40.现在将参照附图来详细描述本发明的各种示例性实施例。应理解,除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不应被理解为对本发明范围的限制。
41.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不必然按照实际的比例关系绘制,例如某些单元的厚度、宽度、长度或距离可以相对于其他结构有所放大。
42.以下对示例性实施例的描述仅仅是说明性的,在任何意义上都不作为对本发明及其应用或使用的任何限制。这里对于相关领域普通技术人员已知的技术、方法和装置可能不作详细讨论,但在适用这些技术、方法和装置情况下,这些技术、方法和装置应当被视为本说明书的一部分。
43.应注意,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图说明中将不需要对其进行进一步讨论。
44.图1a、图1b分别为本发明两个不同实施例单边驱动的药物输注装置的俯视图。
45.单边驱动的药物输注装置包括:粘性贴片100、控制单元101、输注单元102和输注针103。
46.控制单元101用于控制输注单元102内部线性驱动器或复位单元力的输出以控制药物输注。控制单元101还可以与远程设备之间建立无线通信。
47.输注单元102包括用于实现药物输注机械功能的各个单元,下文将详细叙述。
48.在本发明实施例中,控制单元101和输注单元102分开设计,两者通过防水插塞相连接。控制单元101可以重复使用,输注单元102一次性使用后可抛弃。在本发明的其它实施例中,输注单元102和控制单元101设置于同一个壳体10的内部,两者通过导线连接,一次性使用后整体抛弃,如图1b所示。
49.粘性贴片100用于将输注单元102或控制单元101,或者两者整体粘贴在皮肤表面。
50.输注针103的一端与储药单元出口连通,另一端送至皮下,以将药物输注到皮下。在本发明实施例中,输注针103设置于输注单元102的一端部。在本发明的其它实施例中,输注针103还可根据其所具备的功能或器件的结构特点而设置在其它位置,如设置于输注装置的中间位置等,这里并不作具体限制。输注针103为刚性输注针或柔性输注针,或者根据所处的不同位置以及实现不同的功能,输注针103也可采用刚性输注针和柔性输注针相结合的设计,在这里并不做具体限制。优选的,在本发明实施例中,输注针103为刚性输注针。
51.图2为本发明实施例输注单元102内部的主要结构示意图。
52.输注单元102内部结构主要包括储药单元110、活塞120、螺杆130、驱动轮140、驱动单元(未示出)、复位单元170和线性驱动器180。驱动单元包括驱动部件150和转轴160。在本发明的实施例中,驱动部件150分别与复位单元170和线性驱动器180连接(在这里,连接包括机械连接或者电连接)。
53.储药单元110用于存储药物。药物包括但不限于胰岛素、胰高血糖素、抗生素、营养液、镇痛药、吗啡、抗凝血剂、基因治疗药物、心血管药物或化疗药物等。
54.活塞120用于将液体药物输注到体内。
55.螺杆130分别与活塞120和驱动轮140相连接。在本发明实施例中,驱动轮140通过转动以螺纹的方式驱动螺杆130前进,进而推动设置于储药单元110中的活塞120向前运动,以达到输注药物的目的。螺杆130为刚性螺杆或柔性螺杆。当螺杆130为柔性螺杆时,螺杆130可以设计成弯曲状。在本发明的一个实施例中,柔性螺杆由多个带有螺纹的子单元活动连接而成。
56.驱动轮140的圆周表面设置有轮齿141。轮齿141为齿轮齿或者棘轮齿。具体的,在本发明实施例中,轮齿141为棘轮齿。棘轮齿能够更容易被推动,提高驱动效率。
57.驱动部件150包括一个驱动端151,用于推动轮齿141,进而推动驱动轮140转动。驱动部件150与转轴160活动连接。
58.复位单元170和线性驱动器180相互配合使驱动部件150绕着转轴160往复旋转,如图2中r方向所示,并且使驱动端151在前进方向和复位方向运动。驱动部件150进行一次往复旋转,驱动端151推动驱动轮140上前进一个轮齿的距离,驱动轮140驱动螺杆130前进一个步长,进而推动活塞120完成一次药物输注。
59.在这里需要说明的是,驱动端151的前进方向是指推动轮齿141运动的方向。驱动端151的复位方向与前进方向相反。在复位时,驱动端151只在轮齿141表面滑动,不实施推动。
60.在本发明的部分实施例中,复位单元170包括弹簧、弹片、弹性板、弹性棒、弹性复位橡胶等弹性件。在这里,弹簧包括压缩弹簧、拉伸弹簧或者扭力弹簧等,下文的弹簧与此处的意义相同。具体的,在本发明实施例中,复位单元170为扭力弹簧。扭力弹簧更利于驱动部件150复位转动。在本发明的一些实施例中,复位单元170还可以是弹性导电件,如金属弹簧、导电橡胶等。在本发明的其他实施例中,复位单元170还包括电驱动型线性驱动器或者电加热型线性驱动器,如形状记忆合金等。本发明的实施例对复位单元170的类型、材料选择及其位置并不做具体限制,只要能够满足使驱动部件150向复位方向转动的条件即可。
61.通电后,形状记忆合金等线性驱动器的物理形态发生变化,形状记忆合金发生收缩形变,输出动力。电流越大,形状记忆合金的收缩形变量越大,动力就越大。明显的,当电
流恒定,形状记忆合金输出的动力就恒定。因此,形状记忆合金等线性驱动器能够输出稳定且可控的动力。
62.线性驱动器180为电驱动型线性驱动器或者电加热型线性驱动器。通过交替通断电,线性驱动器180输出或停止输出动力。具体的,在本发明实施例中,线性驱动器180为形状记忆合金。
63.图3a-图3c为本发明不同实施例驱动端151推动轮齿141运动的结构俯视图。图4a-图4c为本发明不同实施例线性驱动器180、复位单元170分别与驱动部件150互相配合的结构示意图。
64.如图3a和图3b所示,本发明实施例驱动部件150往复旋转的原理如下:当线性驱动器180以f
p
拉动驱动部件150时,驱动部件150绕着转轴160逆时针转动,且可以带动驱动端151推动轮齿141前进,驱动轮140向前进方向转动,进而驱动螺杆130向da方向前进。复位单元170为弹性件,并产生逐渐增强的弹力fr。当线性驱动器180停止提供动力,驱动部件150在弹力fr的作用下绕着转轴160顺时针转动。此时,驱动端151停止推动轮齿141,而在轮齿141表面滑动,驱动轮140停止转动。驱动部件150完成一次往复旋转。
65.如图3b所示,在本发明的另一个实施例中,复位单元170和线性驱动器180均设置于转轴160的一侧。且根据常规的技术原理,本领域技术人员可以调整复位单元170、驱动部件150以及线性驱动器180的位置关系以及彼此的连接关系,在这里并不作具体限制,只要能够满足上述转动的条件即可。
66.如图3c所示,在本发明的又一个实施例中,复位单元170包括电驱动型线性驱动器或者电加热型线性驱动器,如形状记忆合金等。驱动端151推动轮齿141的原理与前文一致,但驱动端151停止前进后,驱动部件150不能够自动复位,需要复位单元170提供复位动力fb。f
p
与fb的方向相反,复位单元170与线性驱动器180互相配合使驱动部件150往复旋转。明显的,本领域技术人员可以根据需要调整的f
p
与fb方向,只要能够满足使驱动部件150往复旋转的条件即可,如图4a-图4c所示。
67.优选的,如图3a-图3c所示,在本发明实施例中,f
p
的方向和fr(或者fb)、da的方向均平行。这样的平行设计充分利用输注装置内部的空间和结构关系,使内部结构更紧凑。
68.在本发明的其它实施例中,f
p
的方向和fr(或者fb)的方向或da的方向也可以不平行,这里并不作具体限制,只要能够达到使驱动部件150往复旋转的目的即可。
69.图5a和图5b为线性驱动器180拉力方向与螺杆130前进方向不平行的结构示意图。图5b为图5a的俯视图。
70.线性驱动器180拉力f
p
的方向与螺杆130前进方向da垂直。转轴160和复位单元170设置在底座190上。如上文所述,驱动部件150在r方向的往复旋转可带动驱动端151推动轮齿141,使驱动轮140向w方向转动,进而驱动螺杆130在da方向上前进。驱动部件150的驱动原理与前文一致。
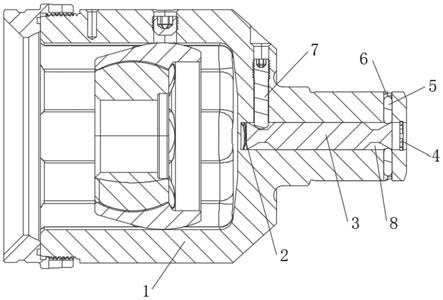
71.图6a-图6c分别为驱动部件150处于初始位置,半程位置和全程位置的结构示意图。
72.在本发明实施例中,输注装置内还设置有能限制驱动部件150前进位置的挡墙171和172,挡墙171为半程挡墙,挡墙172为全程挡墙。当驱动部件150处于初始位置时,驱动部件150与挡墙不接触,当驱动部件150处于半程位置时,驱动部件150与挡墙171接触,当驱动
部件150处于全程位置时,驱动部件150与挡墙172接触,驱动部件150与挡墙171或172接触时接触点的电势产生变化,电势变化产生的电信号通过导线传输至控制单元101中,控制单元101判断驱动单元是否已达到所选输注模式的终点。在本发明实施例中,驱动轮140驱动螺杆130前进1个步长,输注单元完成一单位输注量的药物输注,则在一次往复运动中,当驱动单元的运动终点为驱动单元与半程挡墙171的接触点时,可实现1/2单位输注量的输注,精确控制驱动部件150的转动幅度,提高输注的精度,可满足用户或患者对不同输注精度的要求。
73.具体的,当线性驱动器180拉动驱动部件150向前进与半程挡墙171接触时触发第一电信号,驱动端151推动驱动轮140前进1/2个轮齿的距离,驱动轮140驱动螺杆130前进1/2个步长,第一电信号传输至控制单元101中,判断驱动单元是否已达到所选输注模式的终点,当所选输注模式中最高精度要求为1/2单位输注量时,控制单元101控制线性驱动器180停止输出动力,驱动单元在复位单元的作用下复位;当所选输注模式中最高精度要求为1单位输注量时,控制单元101控制线性驱动器180继续输出动力,当线性驱动器180拉动驱动部件继续向前进,挤压半程挡墙171,并与全程挡墙172接触时触发第二电信号,驱动端151推动驱动轮140上再前进1/2个轮齿的距离,驱动轮140驱动螺杆130再前进1/2个步长,控制单元101控制线性驱动器180动力停止输出,驱动单元在复位单元的作用下复位。
74.在本发明实施例中,如在输注胰岛素时,若单位输注量为0.001u,则在一次往复运动中,可完成0.0005u和0.001u的输注。相应的,当所选输注模式要求为0.0015u时,则可通过控制驱动单元的一次全程往复运动和一次半程往复运动完成输注。当然,当所选输注模式要求为0.001u*n 0.0005u时,则可通过控制驱动单元的n次全程往复运动和一次半程往复运动完成输注。
75.在本发明的另一个实施例中,挡墙的数量还可以为3个,即分别为1/3程挡墙,2/3程挡墙,和全程挡墙。则在一次输注过程中可实现1/3单位输注量的输注,进一步精确控制驱动部件150的转动幅度,提高输注的精度,满足用户或患者对不同输注精度的要求。同样的,挡墙的数量还可以为4个或更多个(n≥4),相应的,输注精度可提高至1/n单位输注量,从理论上来讲,n越大,输注精度越高,越能满足不同用户或患者对不同输注精度的要求,但由于输注装置体积小型化的要求,过多的挡墙会增大输注装置的体积,增加输注装置的设计难度,因此,挡墙的数量以2-3个为宜。
76.在本发明实施例中,挡墙171和172设置在驱动单元的同侧,复位单元170为弹性件或弹性导电件,驱动单元的另一侧不设置挡墙,驱动部件150在另一侧的转动终点由复位单元确定,也可以在驱动单元的另一侧设置一个或两个挡墙,由复位单元和挡墙共同驱动部件150在另一侧的运动终点。
77.在本发明的另一实施例中,复位单元170电驱动型线性驱动器或者电加热型线性驱动器,如形状记忆合金等,挡墙171和172设置在驱动单元的同侧,在驱动单元的另一侧还对应的设置有两个挡墙,限制驱动部件150在另一侧的转动终点,也可以在驱动单元的另一侧只设置一个挡墙,驱动部件150在另一侧的另一转动终点由控制单元101和挡墙共同控制,还可以在驱动单元的另一侧不设置挡墙,驱动部件150在另一侧的转动终点全部由控制单元101控制。
78.同样的,本发明实施例中,当挡墙在驱动单元一侧的数量多于2个时,挡墙在驱动
单元另一侧设置的数量在此不作具体限制,只要能够控制驱动部件150在另一侧的运动终点即可。
79.在本发明实施例中,挡墙为弹性导电件,如导电弹簧、导电弹片、导电橡胶或者导电硅胶等,优选的,在本发明实施例中,挡墙为弹簧针(pogo pin),挡墙171沿水平方向(驱动螺杆130方向)设置,挡墙172沿竖直方向(垂直于输注装置底面的方向)设置,可以充分利用输注装置的内部空间,优化输注装置的结构布置。挡墙171的端部位置相比于挡墙172的端部更靠近驱动单元以便顺利的依次与驱动单元接触来确定驱动部件150的运动终点,并触发电信号,实现输注装置的高精度输注。在本发明的其他实施例中,各挡墙结构和材质以及设置方式在此均不做具体限定,只要能与驱动单元接触来确定驱动部件150的运动终点,并触发电信号,实现输注装置的高精度输注即可。
80.图7为本发明实施例驱动部件150往复旋转幅度变化示意图。
81.本发明实施例驱动部件150实现两种往复旋转幅度的原理如下:控制单元101控制线性驱动器180动力输出的大小,并结合复位单元170的作用,使驱动部件150往复旋转,并使驱动端151前进和复位。en表示驱动端前端到达的位置,如e1、e2、e3、e4、e5。hn分别表示两个不同位置en之间的距离。sn表示线性驱动器180动力的作用点s在往复旋转过程中的不同位置,图7中点弧线表示s的运动轨迹,则s1、s2、s3、s4、s5分别与e1、e2、e3、e4、e5相对应。明显的,不同sn之间的距离可用于表示驱动部件150的旋转幅度。具体的,在本发明实施例中,h1为轮齿141的齿距,h1=3h2。线性驱动器180按照指令使驱动端151推动轮齿141从e1前进到e2位置,线性驱动器180停止输出动力,复位单元170使驱动端151复位到e3位置后停止复位,驱动部件150完成第一次往复旋转,驱动部件150的旋转幅度为s
1-s2和s
2-s3。在第一次往复旋转过程中,驱动端前端推动轮齿141前进的距离为h1,药物输注量为v1,复位距离为h3。此时,药物输注量v1视为第一模式下的单位输注量。当进行下一次驱动时,线性驱动器180再次输出动力,驱动端前端在前进距离h3的过程中,驱动端151在轮齿141表面滑动,驱动轮140不发生转动,输注装置不进行药物输注。当驱动端前端到达e2位置并继续前进h4的距离时,驱动端前端推动轮齿141前进至e4位置,驱动轮140转动,输注装置进行药物输注。线性驱动器180停止动力输出,复位单元170使驱动端151复位到某一特定位置,如e5位置,驱动部件150完成第二次往复旋转,驱动部件150旋转幅度为s
3-s4和s
4-s5。在第二次往复旋转的过程中,驱动端前端前进距离为(h3 h4),驱动端151推动轮齿141前进的距离为h4,药物输注量为v2。此时,药物输注量v2为第二模式下的单位输注量。明显的,由于两种模式下h1>h4,驱动部件150分别只在旋转幅度s
1-s2和s
2-s4下推动驱动轮140转动,且旋转幅度s
1-s2大于旋转幅度s
2-s4,所以v1>v2。因此,本发明实施例的输注装置具有两种不同的单位输注量。
82.依此类推,e1、e2、e3、e4、e5之间的距离可以任意选择,如h1=h2、h1=2h2、h1=4h2等,输注装置则具有多种不同的单位输注量。或者作用力点s还可以旋转到s6的位置。而且s4和s6并不是驱动部件150旋转的极限位置,在这里并不做具体限制。
83.需要说明的是,如上文所述,在本发明的实施例中,驱动端151前进,输注装置不一定进行药物输注,只有驱动端151推动轮齿141前进,输注装置才进行药物输注。
84.驱动部件150每一个往复旋转对应一种单位输注量。驱动部件150具备多种不同转动幅度,因此药物输注装置具有多种不同的单位输注量。以胰岛素为例,本发明实施例药物输注装置的单位输注量范围为0.0005u~0.25u(在这里,单位输注量范围包括端点数值,即
单位输注量包括0.0005u和0.25u)。如在本发明的一些实施例中,药物输注装置的单位输注量可包括0.001u、0.0025u、0.005u、0.0075u、0.01u、0.025u、0.05u、0.075u、0.1u等。具体的,在本发明实施例中,药物输注装置的单位输注量包括0.005u、0.0075u、0.01u、0.025u、0.05u。
85.需要说明的是,在本发明的实施例中,胰岛素浓度为100u/ml,在其他实施例中,胰岛素的浓度还可以为200u/ml、400u/ml等,在这里并不做具体限制。
86.这里需要说明的是,当h1=h2时,输注装置的单位输注量始终保持v1,驱动部件150的旋转幅度始终保持s
1-s2与s
2-s1,此时药物输注量相对稳定。
87.本发明实施例可以增大线性驱动器180或复位单元170动力输出的频率,增大驱动部件150往复旋转频率或者往复旋转速率,进而提高输注装置的药物输注速率。
88.且本发明的其他实施例的输注装置均可以改变线性驱动器180或复位单元170动力输出频率,使之具备多种输注速率。在这里,线性驱动器180或复位单元170动力输出频率的变化能够改变驱动部件150任一单次运动的速率、往复运动的速率或者往复运动的频率等。
89.图8a和图8b为本发明实施例驱动轮140和底座190或限位部件191的结构示意图。图8a、图8b为图3c的主视图。
90.当驱动端151在轮齿141表面滑动时,驱动端151通过与轮齿141接触向驱动轮140施加一定的压力,确保驱动轮140不转动。但明显的,由于轮齿141和驱动轮140圆周的结构特点,在不同位置,驱动端151对驱动轮140的压力不相等,因此,当驱动端151在轮齿141表面滑动时(包括复位运动或者滑动前进),驱动轮140有向前进方向转动或者反转的可能性,影响药物输注量的准确性,存在安全隐患。因此,本发明实施例进一步增大了驱动轮140与其相邻结构的摩擦力,进一步降低了出现上述问题概率。
91.如图8a所示,驱动轮140活动装配于底座190上,两者互相摩擦配合。在这里,摩擦配合是两个互相运动的结构之间预设有一定摩擦力,下文的摩擦配合与此处的意义相同。本发明实施例在位置a处(如虚线框所示)增大驱动轮140和底座190相对运动的摩擦力,以确保当驱动端151在轮齿141表面滑动时,驱动轮140停止转动。
92.如图8b所示,在本发明的另一个实施例中,输注装置还包括限位部件191。限位部件191活动装配于所述底座190上,以限定驱动轮140的位置。限位部件191与驱动轮140摩擦配合,摩擦配合的位置在位置b或位置c处(如虚线框所示)。同样的,本发明实施例通过限位部件191增大驱动轮140在转动时受到的摩擦力,确保当驱动端151在轮齿141表面滑动时,驱动轮140停止转动。同时,限位部件191能够充分利用输注装置内部结构在不同的位置与驱动轮140摩擦配合。
93.本发明实施例并不限制上述摩擦配合的位置,只要能够满足增大驱动轮140在转动时受到的摩擦力的条件即可,如还可以同时作用于驱动轮140的两个侧面。本发明实施例也不限制限位部件191的材料,如限位部件191包括弹性件、塑料件或金属件等。
94.本发明其他实施例也可以不设置上述的摩擦配合,而是增加驱动端151对轮齿141的压力,进而提高驱动轮140的最大静摩擦力,确保当驱动端151在轮齿141表面滑动时,驱动轮140不发生转动。
95.图9、图10为本发明不同实施例驱动单元包括两个驱动部件的结构示意图。
96.如图9所示,驱动部件250a在线性驱动器280a和复位单元270a的作用下绕着转轴260在r方向往复旋转。同样,驱动部件250b在线性驱动器280b和复位单元270b的作用下绕着转轴260在r方向往复旋转。在本发明实施例中,两个驱动部件的旋转互不干扰,且驱动部件250a和驱动部件250b均可独立实施上文所述的驱动方式。
97.优选的,在本发明实施例中,驱动部件250a和驱动部件250b非同步旋转。即,当驱动部件250a的驱动端251a推动轮齿241运动时,驱动部件250b的驱动端251b在轮齿241表面滑动。当驱动端251b滑动至某一位置后,控制单元控制线性驱动器280a停止对驱动部件250a输出动力,转而控制线性驱动器280b对驱动部件250b输出动力。此时,驱动部件250a在复位单元270a作用下沿顺时针方向转动,驱动端251a在轮齿表面滑动,而驱动端251b推动轮齿241。依次交替推动,进而驱动部件250a和250b完成对驱动轮240的交替推动。
98.在本发明的实施例中,线性驱动器280a和280b拉力f
p
、复位单元270a和270b的弹力fr以及螺杆230前进方向da如图所示。如前文所述,拉力f
p
的方向和螺杆230前进方向da平行。
99.在本发明的实施例中,复位单元270a和270b的类型可参考上文,这里不再赘述。
100.如图10所示,驱动端351a和351b分别交替推动轮齿341,线性驱动器380a和380b的动力输出均由控制单元控制。
101.需要说明的是,在本发明实施例中,线性驱动器380a的拉力f
p’的方向和线性驱动器380b的拉力f
p”的方向相反。明显的,复位单元370a的复位动力f
r’的方向和复位单元370b的复位动力f
r”的方向也相反。
102.同样的,在本发明实施例中,驱动部件350a和350b非同步旋转。即,当驱动部件350a的驱动端351a推动轮齿341前进时,驱动部件350b的驱动端351b在轮齿341表面滑动。当驱动端351b滑动至某一位置后,控制单元控制线性驱动器380a停止对驱动部件350a输出动力,转而控制线性驱动器380b对驱动部件350b输出动力,驱动部件350a在复位单元370a作用下沿顺时针方向复位转动,驱动端351a在轮齿341表面滑动,而驱动端351b推动轮齿341。依次交替推动,驱动部件350a和350b完成对驱动轮340的交替推动。
103.同样的,驱动部件350a和350b均可独立实施上文所述的驱动方式。复位单元370a和370b的类型可参考上文,这里不再赘述。
104.需要说明的是,在本发明的其它实施例中,驱动单元还可以包括更多个驱动部件,每个驱动部件上还可以包括更多个驱动端,或者输注装置中包括更多个驱动轮,不同的驱动部件分别推动相应的驱动轮转动。
105.图11a和图11b为本发明一个实施例驱动部件450的两个驱动端451a和451b分别与两个驱动轮440a和440b相互配合的结构示意图。图11b为图11a驱动轮440a和440b部分轮齿结构的右视图。
106.如图11a和图11b所示,在本发明实施例中,驱动部件450包括两个左右设置的驱动端451a和451b,且两个左右设置的驱动轮440a和440b固定连接(即两个驱动轮可以同步前进),驱动端451a和451b可分别推动驱动轮440a和440b转动,转轴460设置于两个驱动轮440a和440b的同一侧。本发明实施例的线性驱动器480和复位单元470均为形状记忆合金,驱动端451a或451b均能推动轮齿441a或441b前进,其工作原理、运作方式与前文一致,在此不再赘述。
107.除了每一个驱动端451a或451b单独实施推动,本发明实施例还可以通过调整驱动端451a和451b前端之间的距离,或者调整轮齿441a和441b的交错程度使两个驱动端451a和451b相配合运作。优选的,在本发明实施例中,轮齿441a和441b交错设置,交错程度为t,如图11a和图11b所示。
108.明显的,在本发明实施例中,两个驱动端451a和451b同步往复运动。如图11a所示,上一次前进动作结束后,驱动部件450开始复位转动,驱动端451a比驱动端451b先到达驱动位置,驱动部件450可改用驱动端451a开始下一次前进动作。或者驱动部件450可以继续复位转动,直至驱动端451b到达下一个驱动位置开始下一次前进动作。当然,驱动部件450还可以继续复位更大距离,如上文所述。在这里,驱动位置是指驱动端能够推动轮齿前进的位置,如图7中e1、e2位置,下文的驱动位置与此处的意义相同。
109.因此,通过控制驱动部件450的旋转幅度,驱动端451a或451b可单独推动对应的轮齿441a或441b前进,或者驱动端451a或451b交替推动轮齿前进,使输注装置具备多种单位输注量。
110.图12a和图12b为本发明再一个实施例驱动部件550包括两个上下设置驱动端551a和551b,且驱动端551a和551b与同一个驱动轮540相互配合的结构示意图。图12b为图12a中驱动部件550的立体结构图。
111.如图12a和图12b所示,驱动部件550包括两个上下设置驱动端551a和551b,且两者与同一个驱动轮540相互配合,驱动端551a和551b同步往复运动。驱动端551a和551b的前端不平齐,如两者相距一定距离m,使两者不能同时推动轮齿541前进,如图12a所示。当驱动端551b结束上一次前进动作后,驱动部件550进行复位转动,驱动端551a比驱动端551b先到达下一个驱动位置,驱动部件550可改用驱动端551a推动轮齿541前进,开始下一次前进动作。或者驱动部件550继续复位转动,直至驱动端551b到达下一个驱动位置,开始下一次前进动作。当然,驱动部件550还可以继续复位转动,使驱动端551a和551b复位更大距离,如前文所述。
112.因此,通过控制线性驱动器580或复位单元570动力输出,驱动部件550具有不同的旋转幅度,驱动端551a或551b可单独推动轮齿541前进,或者两者相互交替推动轮齿541前进,使输注装置具备多种不同的单位输注量。
113.在本发明的其他实施例中,驱动部件还可以包括更多个驱动端,如3个、4个或者更多个,在此不作具体限制。
114.综上所述,本发明公开了一种单边驱动的药物输注装置,至少有2个挡墙,可以精确的控制驱动单元的转动幅度,使最小输注量至少为单位输注量的1/2,提高输注装置的输注精度,用户或者闭环系统可以根据身体实际需要灵活选择,达到精确控制体液水平的目的,满足用户需求,提高了用户体验。
115.虽然已经通过示例对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。