1.本发明涉及根茎收割机械领域,尤其涉及一种带泥根茎震动机械控制系统。
背景技术:
2.根茎收割机械又名土豆收获机、洋芋收获机,是专门用于收获马铃薯的机器。该机与15-24马力小四轮拖拉机配套作业,主要用于土豆、红薯等地下薯类的收获,成堆等工序。
3.根茎收割机械中,将机具下悬挂壁销轴插入拖拉机悬挂臂孔中,销好销锁,机具上悬挂臂与拖拉机中央拉杆链接,可以通过旋转中央拉杆以调整机具深浅,分合变速箱固家到拖拉机的输出轴上,机具变速箱与分合变速箱以拐臂连接。
4.目前,根茎收割结构的现场铲土机械的铲土容器内的带泥根茎被实施相同模式的震动清理处理,以完成对根茎和泥土的分离,这种震动清理处理模式完全没有考虑到实际的铲土情况,例如,在获取的带泥根茎中根茎分布面积较广时,这时如果不减少震动的时长和幅度,必然会造成不必要的电力能源的浪费以及现场根茎的损伤。
技术实现要素:
5.为了解决现有技术中的技术问题,本发明提供了一种带泥根茎震动机械控制系统,能够基于根茎收割结构的现场铲土机械的铲土容器内的带泥根茎中泥土根茎各自的分布面积动态调节后续对带泥根茎执行震动分离的震动机械的震动策略,从而在节能环保和清理效果之间达到平衡。
6.为此,本发明至少需要具备以下两处关键的发明点:
7.(1)对根茎收割结构的现场铲土机械的铲土容器内的带泥根茎执行图像数据监控处理和根茎泥土各自分布面积的识别,以基于根茎占据面积百分比确定震动机械的震动时长和震动幅度,所述百分比数值越大,确定的震动时长和震动幅度的数值越小,从而对根茎占据面积较广的带泥根茎实现小幅度小时长的震动处理;
8.(2)基于不同器件占据的逻辑门数据实现电力资源的动态分配,占据的逻辑门数越多,提供的电力资源越多。
9.根据本发明的一方面,提供了一种带泥根茎震动机械控制系统,所述系统包括:
10.用户设定接口,设置在根茎收割结构的控制面板上,用于基于用户的输入,设置所述根茎收割结构的当前铲土频率和当前铲土深度。
11.更具体地,在所述带泥根茎震动机械控制系统中,所述系统还包括:
12.计时服务器件,设置在所述控制面板的下方,用于为所述根茎收割结构的各个电子部件提供计时服务。
13.更具体地,在所述带泥根茎震动机械控制系统中,所述系统还包括:
14.现场铲土机械,设置在根茎收割结构的前端,与所述用户设定接口连接,用于基于接收到的当前铲土频率和当前铲土深度执行对所述根茎收割结构前方土壤执行铲土操作;
15.数据监控器件,设置在所述现场铲土机构的上方,用于在所述现场铲土机械每完
成一次铲土操作,对所述现场铲土机械的铲土容器内的带泥根茎执行图像数据监控处理,以获得容器内部画面;
16.信号变换器件,设置在所述现场铲土机构的基座内,与所述数据监控器件连接,用于对接收到的容器内部画面执行仿射变换操作,以获得对应的信号变换画面;
17.数据滤波器件,设置在所述基座内,与所述信号变换器件连接,用于对接收到的信号变换画面执行组合滤波处理,以获得对应的数据滤波画面;
18.定制增强器件,设置在所述基座内,与所述数据滤波器件连接,用于对接收到的数据滤波画面执行应用边缘增强和对比度提升的持续图像处理,以获得对应的定制增强画面;
19.根茎鉴别机构,与所述定制增强器件连接,用于根据根茎的颜色成像特性识别所述定制增强画面中的每一个构成根茎对象的像素点以作为第一种类像素点,将与泥土的灰度数值范围匹配的每一个构成泥土对象的像素点作为第二种类像素点;
20.数值解析机构,与所述根茎鉴别机构连接,用于获取所述定制增强画面中的第一种类像素点和第二种类像素点的总和以作为第一解析数目,获取所述定制增强画面中第一种类像素点的总和以作为第二解析数目;
21.时长提取机构,与所述数值解析机构连接,用于基于所述第一解析数目占据所述第二解析数目的百分比确定对应的震动时长,所述百分比数值越大,确定的对应的震动时长越短;
22.幅度提取机构,与所述数值解析机构连接,用于基于所述第一解析数目占据所述第二解析数目的百分比确定对应的震动幅度,所述百分比数值越大,确定的对应的震动幅度越小;
23.动态震动机械,设置在所述现场铲土机械的后端,构成所述根茎收割结构的一部分,分别与所述幅度提取机构和所述时长提取机构连接,用于基于接收到的震动时长和震动幅度对从所述现场铲土机械接收到的带泥根茎执行相应的震动操作。
24.本发明的带泥根茎震动机械控制系统设计紧凑、节能环保。由于能够基于根茎收割结构的现场铲土机械的铲土容器内的带泥根茎中泥土根茎各自的分布面积动态调节后续对带泥根茎执行震动分离的震动机械的震动策略,从而避免产生不必要的功率的浪费。
附图说明
25.以下将结合附图对本发明的实施方案进行描述,其中:
26.图1为根据本发明实施方案示出的带泥根茎震动机械控制系统的现场铲土机械的正面结构示意图。
具体实施方式
27.下面将参照附图对本发明的带泥根茎震动机械控制系统的实施方案进行详细说明。
28.信号处理是对各种类型的电信号,按各种预期的目的及要求进行加工过程的统称。对模拟信号的处理称为模拟信号处理,对数字信号的处理称为数字信号处理。所谓"信号处理",就是要把记录在某种媒体上的信号进行处理,以便抽取出有用信息的过程,它是
对信号进行提取、变换、分析、综合等处理过程的统称。
29.信号处理最基本的内容有变换、滤波、调制、解调、检测以及谱分析和估计等。变换诸如类型的傅里叶变换、正弦变换、余弦变换、沃尔什变换等;滤波包括髙通滤波、低通滤波、带通滤波、维纳滤波、卡尔曼滤波、线性滤波、非线性滤波以及自适应滤波等;谱分析方面包括确知信号的分析和随机信号的分析,通常研究最普遍的是随机信号的分析,也称统计信号分析或估计,它通常又分线性谱估计与非线性谱估计;谱估计有周期图估计、最大熵谱估计等;随着信号类型的复杂化,在要求分析的信号不能满足高斯分布、非最小相位等条件时,又有髙阶谱分析的方法。高阶谱分析可以提供信号的相位信息、非高斯类信息以及非线性信息;自适应滤波与均衡也是应用研究的一大领域。自适应滤波包括横向lms自适应滤波、格型自适应滤波,自适应对消滤波,以及自适应均衡等。此外,对于阵列信号还有阵列信号处理等等。
30.目前,根茎收割结构的现场铲土机械的铲土容器内的带泥根茎被实施相同模式的震动清理处理,以完成对根茎和泥土的分离,这种震动清理处理模式完全没有考虑到实际的铲土情况,例如,在获取的带泥根茎中根茎分布面积较广时,这时如果不减少震动的时长和幅度,必然会造成不必要的电力能源的浪费以及现场根茎的损伤。
31.为了克服上述不足,本发明搭建了一种带泥根茎震动机械控制系统,能够有效解决相应的技术问题。
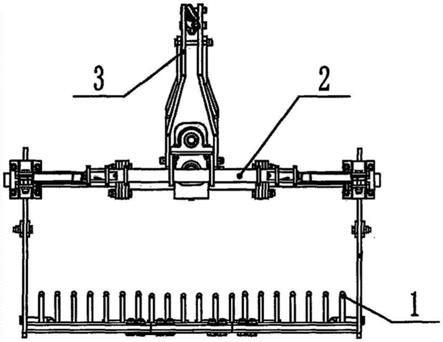
32.图1为根据本发明实施方案示出的带泥根茎震动机械控制系统的现场铲土机械的正面结构示意图。
33.其中,如图1所示,1为现场铲土机械的铲体,2为现场铲土机械的水平支架,3为现场铲土机械的垂直支架。
34.根据本发明实施方案示出的带泥根茎震动机械控制系统包括:
35.用户设定接口,设置在根茎收割结构的控制面板上,用于基于用户的输入,设置所述根茎收割结构的当前铲土频率和当前铲土深度。
36.接着,继续对本发明的带泥根茎震动机械控制系统的具体结构进行进一步的说明。
37.所述带泥根茎震动机械控制系统中还可以包括:
38.计时服务器件,设置在所述控制面板的下方,用于为所述根茎收割结构的各个电子部件提供计时服务。
39.所述带泥根茎震动机械控制系统中还可以包括:
40.现场铲土机械,设置在根茎收割结构的前端,与所述用户设定接口连接,用于基于接收到的当前铲土频率和当前铲土深度执行对所述根茎收割结构前方土壤执行铲土操作;
41.数据监控器件,设置在所述现场铲土机构的上方,用于在所述现场铲土机械每完成一次铲土操作,对所述现场铲土机械的铲土容器内的带泥根茎执行图像数据监控处理,以获得容器内部画面;
42.信号变换器件,设置在所述现场铲土机构的基座内,与所述数据监控器件连接,用于对接收到的容器内部画面执行仿射变换操作,以获得对应的信号变换画面;
43.数据滤波器件,设置在所述基座内,与所述信号变换器件连接,用于对接收到的信号变换画面执行组合滤波处理,以获得对应的数据滤波画面;
44.定制增强器件,设置在所述基座内,与所述数据滤波器件连接,用于对接收到的数据滤波画面执行应用边缘增强和对比度提升的持续图像处理,以获得对应的定制增强画面;
45.根茎鉴别机构,与所述定制增强器件连接,用于根据根茎的颜色成像特性识别所述定制增强画面中的每一个构成根茎对象的像素点以作为第一种类像素点,将与泥土的灰度数值范围匹配的每一个构成泥土对象的像素点作为第二种类像素点;
46.数值解析机构,与所述根茎鉴别机构连接,用于获取所述定制增强画面中的第一种类像素点和第二种类像素点的总和以作为第一解析数目,获取所述定制增强画面中第一种类像素点的总和以作为第二解析数目;
47.时长提取机构,与所述数值解析机构连接,用于基于所述第一解析数目占据所述第二解析数目的百分比确定对应的震动时长,所述百分比数值越大,确定的对应的震动时长越短;
48.幅度提取机构,与所述数值解析机构连接,用于基于所述第一解析数目占据所述第二解析数目的百分比确定对应的震动幅度,所述百分比数值越大,确定的对应的震动幅度越小;
49.动态震动机械,设置在所述现场铲土机械的后端,构成所述根茎收割结构的一部分,分别与所述幅度提取机构和所述时长提取机构连接,用于基于接收到的震动时长和震动幅度对从所述现场铲土机械接收到的带泥根茎执行相应的震动操作。
50.所述带泥根茎震动机械控制系统中:
51.基于接收到的当前铲土频率和当前铲土深度执行对所述根茎收割结构前方土壤执行铲土操作包括:所述现场铲土机械的最深铲土深度低于等于接收到的当前铲土深度。
52.所述带泥根茎震动机械控制系统中:
53.基于接收到的当前铲土频率和当前铲土深度执行对所述根茎收割结构前方土壤执行铲土操作包括:所述现场铲土机械的铲土频率等于接收到的当前铲土频率。
54.所述带泥根茎震动机械控制系统中还可以包括:
55.电源供应机构,构成所述根茎收割结构的一部分,分别与所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构连接;
56.其中,所述电源供应机构根据当前剩余电力实现对所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构各个用电设施的电力分配。
57.所述带泥根茎震动机械控制系统中:
58.所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构分别采用不同逻辑门数的可编辑逻辑器件来实现。
59.所述带泥根茎震动机械控制系统中:
60.所述电源供应机构根据当前剩余电力实现对所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构各个用电设施的电力分配包括:所述电源供应机构根据当前剩余电力按比例实现对所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构各个用电设施的电力分配。
61.所述带泥根茎震动机械控制系统中:
62.所述电源供应机构根据当前剩余电力实现对所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构各个用电设施的电力分配包括:根据所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构中逻辑门数分配分别提供给所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构的电力能源。
63.所述带泥根茎震动机械控制系统中:
64.根据所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构中逻辑门数分配分别提供给所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构的电力能源包括:所述信号变换器件、所述数据滤波器件、所述定制增强器件、所述根茎鉴别机构以及所述数值解析机构中,门数越多的部件被分配到的电力能源越多。
65.另外,在所述带泥根茎震动机械控制系统中,基于接收到的震动时长和震动幅度对从所述现场铲土机械接收到的带泥根茎执行相应的震动操作包括:所述动态震动机械的当前震动时长不小于所述接收到的震动时长;
66.以及在所述带泥根茎震动机械控制系统中,基于接收到的震动时长和震动幅度对从所述现场铲土机械接收到的带泥根茎执行相应的震动操作包括:所述动态震动机械的当前震动幅度不低于所述接收到的震动幅度。
67.虽然参考其示范性实施例具体显示和描述了本发明,然而本领域的一般技术人员可以理解在不脱离权利要求所界定的本发明的精神和范围内,可以作出形式和细节上的不同变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
